一种人机协同u型装配线平衡问题的解决方法和装置
技术领域
1.本发明涉及管理科学技术领域,特别是指一种人机协同u型装配线平衡问题的解决方法和装置。
背景技术:
2.装配线是一种以流程为导向的生产系统,被广泛地应用在大批量标准化商品的工业生产中,在小批量定制产品的生产中也具有重要地位,被认为是是产品生产的关键和最后一步,其中,装配线平衡问题 (assembly line balancing problem, albp) 是关键的装配调度问题,其目的是将装配任务合理分配到现有工位上,同时保证工序间的优先关系,以实现减少节拍时间,提高生产效率的目标。u型装配线是面向流程的装配线生产系统之一,广泛应用于汽车和电子行业 ,与制造企业的生产效率息息相关。u型装配线平衡问题(u-type assembly line balancing problem, ualbp)最初是由miltenburg和wijingaard于1994年提出,将一组用于组装产品的工序分配到不同的工位,每个工序只有在它的直接前继或直接后继被完全分配后,才能被分配到工位上,并达到最小化工位数量或节拍时间的目标。近年来,自动化在工业制造中的作用不断增强,利用机器人的自动化装配线在大批量和低成本的标准化产品制造中占主导地位 。机器人具有高水平精度、可重复性高、可承载强度大的特点,高度自动化可以提高装配系统的生产率 。然而,由于机器人技术往往无法达到与人类同等水平的智能和技能,装配系统中的工序不能完全自动化,工人执行的手工工序仍然是装配系统的灵活性和适应性所在。因此,研究人机协同u型装配线平衡问题(u-type assembly line balancing problem with human-robot collaboration, ualbp-hrc),有重要理论和实践意义,但是现有技术还很少有这种研究。
技术实现要素:
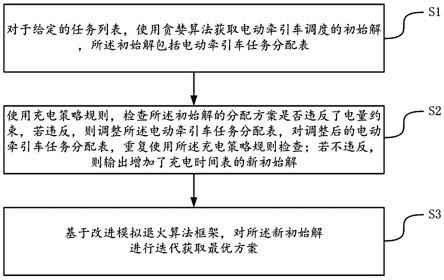
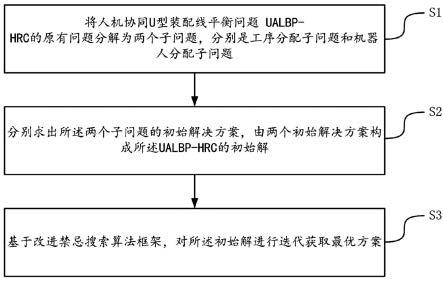
3.本发明提供了一种人机协同u型装配线平衡问题的解决方法和装置,用以对多类型机器人的人机协同u型装配线平衡问题进行高效求解。所述技术方案如下:一方面,提供了一种人机协同u型装配线平衡问题的解决方法,所述方法包括:s1、将人机协同u型装配线平衡问题 ualbp-hrc的原有问题分解为两个子问题,分别是工序分配子问题和机器人分配子问题;s2、分别求出所述两个子问题的初始解决方案,由两个初始解决方案构成所述ualbp-hrc的初始解;s3、基于改进禁忌搜索算法框架,对所述初始解进行迭代获取最优方案。
4.可选地,对所述工序分配子问题求出初始解决方案,具体包括:分别随机为每个工序序号生成一个[0,1]之间的随机小数,组成工序优先级列表,工序序号对应的随机数越大,表明工序优先级越高,按照工序优先级从高到低的顺序,按下面步骤依次将工序分配到工位上:从第一个工位开始分配工序,在分配某一工序时,判断得出如果所述工序的所有
前驱工序都分配完成,将所述工序分配到入口线上;判断得出如果所述工序的所有后继工序都分配完成,将所述工序分配到出口线上;判断得出如果所述工序的前驱工序和后继工序都未完成分配,按照优先级轮到所述工序,也不得进行分配,而是接着判断比这个工序优先级低的工序的分配,直到所有的工位上工序分配结束,开始下一轮循环的时候,才继续分配之前尚未分配的工序;以所述原有问题的节拍时间的下限作为当前节拍时间,每分配完成一个工序,计算下当前工位的工位时间,所述工位时间等于所述当前工位上已分配的工序的加工时间之和,并将所述工位时间和所述当前节拍时间对比,如果超过,说明当前工位的工位时间已经溢出,移除所述当前工位上的所述工序,开启下一个工位的工序分配;当尚有工序未分配完成时,将所述当前节拍时间加一,开始新一轮的向工位上分配工序的循环,将未分配的工序继续按照工位序号从小到大的顺序,在工位上分配,若工位时间超过当前节拍时间,继续开启下一个工位的工序分配,直到所有的工序都分配到工位上,最终得到工序分配列表。
[0005]
可选地,对所述机器人分配子问题求出初始解决方案,具体包括:根据机器人数量和工位数量的关系随机生成机器人列表,如果机器人的数量少于工位数量,则先随机选择需要分配机器人的工位序号,接着在需要分配机器人的工位上随机生成一个机器人的型号;如果机器人的数量大于或等于工位数量,根据每个工位上最多分配一个机器人的假设,则对每一个工位随机生成一个机器人的型号,剩余的机器人不进行分配,由此得到机器人分配列表。
[0006]
可选地,所述s3,具体包括:s31、对于前面生成的初始解,计算目标值;s32、将所述初始解赋予当前解i,设置初始迭代数k=0,禁忌表h为空,并把当前解i赋值给全局最优解s;s33、通过邻域操作不断寻找所述当前解i的邻域解,并计算所述邻域解的目标值,所述邻域解的集合构成所述当前解i的邻域a;s34、从所述邻域a中找出最优目标值的局部最优解j,将所述局部最优解j赋值给所述当前解i,并将所述局部最优解j对应的邻域操作放入禁忌表中,更新h;s35、若所述当前解i的目标值优于所述全局最优解s对应的目标值,则将当前解i赋值给全局最优解s,否则不接受所述当前解i,且令k 1,继续进行下次迭代。
[0007]
可选地,所述s31,具体包括:所述目标值为装配线节拍时间,为装配线各工位完成时间中的最大值;所述各工位完成时间的计算方法为:根据所述初始解包括的所述工序分配列表和所述机器人分配列表,确定了每个工位分配的工序和机器人,在没有分配机器人的工位内,工位完成时间为工位内所有工序人工加工时间之和;对于分配机器人的工位,依照工序的排列顺序,分析当前工序的前驱工序情况,计算当前工序的理论加工开始时间,其中理论加工开始时间为当前工序的前驱工序完成时间的最大值;
按照各工序理论加工开始时间的升序,对于每个工序,分别计算其可行加工方式的完成时间,选择完成时间最短的加工方式,所述可行加工方式的完成时间,等于所述可行加工方式的加工开始时间和所述可行加工方式的加工时间之和,其中所述加工开始时间为各工序理论加工开始时间和各工序加工资源空闲时间的最大值;所述各工位完成时间为工位内全部工序完成时间的最大值,所述目标值为所述各工位完成时间中的最大值。
[0008]
可选地,所述s33中的通过邻域操作不断寻找所述当前解i的邻域解,具体包括:对所述工序分配列表进行邻域操作,从所述工序分配列表中分配到入口线上的工序中随机选出两个工序,判断所述两个工序互相交换之后,是否满足正向工序优先关系,若满足则进行交换,若破坏优先关系的话,则不能交换,所述交换为两点交换,包括:从当前解的邻域解中随机选择两个入口线的工序分配列表,对所述两个入口线的工序分配列表,在相应位置随机设置两个交换点,将所述两个交换点之间的部分进行交换;或者,对所述工序分配列表进行邻域操作,从工序分配列表中分配到出口线上的工序中随机选出两个工序,判断所述两个工序互相交换之后,是否满足逆向工序优先关系,若满足则进行交换,若破坏优先关系的话,则不能交换,所述交换为两点交换,包括:从当前解的邻域解中随机选择两个出口线的工序分配列表,对所述两个出口线的工序分配列表,在相应位置分别随机设置两个交换点,将所述两个交换点之间的部分进行交换;或者,对所述机器人列表进行单点交换,包括:从当前解的邻域解中随机选择两个机器人列表,对所述两个机器人分配列表,在相应位置分别随机设置一个交换点,将所述一个交换点之后的部分进行交换。
[0009]
可选地,所述s3还包括:设置迭代数阈值;当多次迭代达到所述迭代数阈值,所述目标值仍没有改进时,执行重启程序来生成新的初始解,并对所述新的初始解,计算目标值,并重复s32-s35。
[0010]
另一方面,提供了一种人机协同u型装配线平衡问题的解决装置,所述装置包括:分解模块,用于将人机协同u型装配线平衡问题 ualbp-hrc的原有问题分解为两个子问题,分别是工序分配子问题和机器人分配子问题;求解模块,用于分别求出所述两个子问题的初始解决方案,由两个初始解决方案构成所述ualbp-hrc的初始解;迭代模块,用于基于改进禁忌搜索算法框架,对所述初始解进行迭代获取最优方案。
[0011]
另一方面,提供了一种电子设备,所述电子设备包括处理器和存储器,所述存储器中存储有至少一条指令,所述至少一条指令由所述处理器加载并执行以实现上述人机协同u型装配线平衡问题的解决方法。
[0012]
另一方面,提供了一种计算机可读存储介质,所述存储介质中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现上述人机协同u型装配线平衡问题的解决方法。
[0013]
本发明提供的技术方案带来的有益效果至少包括:本发明实现了对多类型机器人的人机协同u型装配线平衡问题的高效求解,有助
于填补当前多类型机器人的人机协同u型装配线问题求解方法较少的空白,不仅可以高效解决大规模算例,同时不依赖于算例本身,具有良好的适用性。
附图说明
[0014]
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0015]
图1是本发明实施例提供的一种人机协同u型装配线平衡问题的解决方法流程图;图2是u型人机协同装配线的工作示意图;图3是本发明实施例的工序分配列表示意图;图4是本发明实施例的机器人分配列表示意图;图5是本发明实施例对入口线的工序分配列表进行两点交换邻域操作示意图;图6是本发明实施例对出口线的工序分配列表两点交换邻域操作示意图;图7是本发明实施例对机器人分配列表进行单点交换邻域操作示意图;图8是本发明实施例提供的一种人机协同u型装配线平衡问题的解决装置框图;图9是本发明实施例提供的一种电子设备的结构示意图。
具体实施方式
[0016]
为使本发明要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。
[0017]
如图1所示,本发明实施例提供了一种人机协同u型装配线平衡问题的解决方法,所述方法包括:s1、将人机协同u型装配线平衡问题 ualbp-hrc的原有问题分解为两个子问题,分别是工序分配子问题和机器人分配子问题;s2、分别求出所述两个子问题的初始解决方案,由两个初始解决方案构成所述ualbp-hrc的初始解;s3、基于改进禁忌搜索算法框架,对所述初始解进行迭代获取最优方案。
[0018]
下面结合图2,详细说明本发明实施例提供的一种人机协同u型装配线平衡问题的解决方法。
[0019]
如图2所示,ualbp与albp不同的是,ualbp具有跨工作站的特点,一个工位可被拆分为入口侧和出口侧两个子工位,可以分别在入口子流水线或出口子流水线上执行工序。工件从入口侧到出口侧进行组装,直到完成所有装配工序。 ualbp-hrc是在ualbp的基础上加入人机协同的背景,传统的ualbp只有工人完成装配工序,而在ualbp-hrc中,机器人被引入到装配线的相应工位中开展装配工作,能够进一步缩短节拍时间。节拍时间:流水线上,连续完成两个产品之间的间隔时间。工位数量和机器人数量是已知的参数,机器人可以独立完成装配工序,其效率低于工人,即机器人完成同一个工序所需时间多于工人。机器人也可以和工人协同装配同一个工序,协同装配时间少于工人单独装配所需的时间。在人机协同装配线中,每个工位都必须有工人,可以有机器人,或者没有机器人,在有机器人的工位
上,某些工序可能不能够由机器人加工,因此,不同的工序可能由人工加工、机器人加工或者人机协同加工,每个工序的可行加工方式是每个工序能够使用的加工方式,包括以下至少一种:人工加工、机器人加工和人机协同加工,对于同一个工序来说,可行加工方式是已知的参数,每种可行加工方式的加工时间不同,也是已知的参数,其中,机器人加工的加工时间最长,人工加工方式的加工时间次之,人机协同加工方式的加工时间最短;另外,机器人可能有多种类型,每种类型又有不同的型号,不同型号的机器人的机器人操作,或者不同型号机器人的人机协同操作对于同一工序的可操作性可能是不同的,相应的操作时间也可能是不同的。
[0020]
本发明实施例以最小化节拍时间为优化目标,求解多类型机器人的人机协同u型装配线平衡问题,所述节拍时间:流水线上,连续完成两个产品之间的间隔时间,等于各个工位完工时间的最大值。同时,由于传统的装配线平衡问题已经是np-困难问题,基于多类型机器人的人机协同u型装配线平衡问题也是np-困难问题,直接求解难度较大。
[0021]
本发明实施例提供的一种人机协同u型装配调度方法,所述方法包括:s1、将人机协同u型装配线平衡问题 ualbp-hrc的原有问题分解为两个子问题,分别是工序分配子问题和机器人分配子问题;因为确定了每个工位分配的工序和机器人,就可以计算目标值,即节拍时间,因此,把原有问题分为两个子问题,分别是工序分配子问题和机器人分配子问题。
[0022]
s2、分别求出所述两个子问题的初始解决方案,由两个初始解决方案构成所述ualbp-hrc的初始解;可选地,对所述工序分配子问题求出初始解决方案,具体包括:分别随机为每个工序序号生成一个[0,1]之间的随机小数,组成工序优先级列表,工序序号对应的随机数越大,表明工序优先级越高,按照工序优先级从高到低的顺序,按下面步骤依次将工序分配到工位上:从第一个工位开始分配工序,在分配某一工序时,判断得出如果所述工序的所有前驱工序都分配完成,将所述工序分配到入口线上;判断得出如果所述工序的所有后继工序都分配完成,将所述工序分配到出口线上;判断得出如果所述工序的前驱工序和后继工序都未完成分配,按照优先级轮到所述工序,也不得进行分配,而是接着判断比这个工序优先级低的工序的分配,直到所有的工位上工序分配结束,开始下一轮循环的时候,才继续分配之前尚未分配的工序;以所述原有问题的节拍时间的下限作为当前节拍时间,每分配完成一个工序,计算下当前工位的工位时间,所述工位时间等于所述当前工位上已分配的工序的加工时间之和,并将所述工位时间和所述当前节拍时间对比,如果超过,说明当前工位的工位时间已经溢出,移除所述当前工位上的所述工序,开启下一个工位的工序分配;当尚有工序未分配完成时,将所述当前节拍时间加一,开始新一轮的向工位上分配工序的循环,将未分配的工序继续按照工位序号从小到大的顺序,在工位上分配,若工位时间超过当前节拍时间,继续开启下一个工位的工序分配,直到所有的工序都分配到工位上,最终得到工序分配列表。
[0023]
所述原有问题的节拍时间的下限,等于每个工序的可行加工方式的最小加工时间之和与工位数量的比值,四舍五入取整。
[0024]
如图3所示的工序分配列表,工序分配列表分入口线的工序分配列表和出口线工序分配列表,工序5、1、3分配到工位1的入口线上,工序2、4、8分配到工位2的入口线上,工序9、6分配到工位3的入口线上,工序13、14分配到工位4的入口线上;工序17、18、11分配到工位1的出口线上,工序19、12、10分配到工位2的出口线上,工序20、7分配到工位3的出口线上,工序16、15分配到工位4的出口线上。
[0025]
可选地,对所述机器人分配子问题求出初始解决方案,具体包括:根据机器人数量和工位数量的关系随机生成机器人列表,如果机器人的数量少于工位数量,则先随机选择需要分配机器人的工位序号,接着在需要分配机器人的工位上随机生成一个机器人的型号;如果机器人的数量大于或等于工位数量,根据每个工位上最多分配一个机器人的假设,则对每一个工位随机生成一个机器人的型号,剩余的机器人不进行分配,由此得到机器人分配列表。
[0026]
如图4所示的机器人分配列表,工位1分配机器人1,工位2分配机器人3,工位3分配机器人4,工位4分配机器人2。
[0027]
s3、基于改进禁忌搜索算法框架,对所述初始解进行迭代获取最优方案。可选地,所述s3,具体包括:s31、对于前面生成的初始解,计算目标值;s32、将所述初始解赋予当前解i,设置初始迭代数k=0,禁忌表h为空,并把当前解i赋值给全局最优解s;s33、通过邻域操作不断寻找所述当前解i的邻域解,并计算所述邻域解的目标值,所述邻域解的集合构成所述当前解i的邻域a;s34、从所述邻域a中找出最优目标值的局部最优解j,将所述局部最优解j赋值给所述当前解i,并将所述局部最优解j对应的邻域操作放入禁忌表中,更新h;s35、若所述当前解i的目标值优于所述全局最优解s对应的目标值,则将当前解i赋值给全局最优解s,否则不接受所述当前解i,且令k 1,继续进行下次迭代。
[0028]
可选地,所述s31,具体包括:所述目标值为装配线节拍时间,为装配线各工位完成时间中的最大值;所述各工位完成时间的计算方法为:根据所述初始解包括的所述工序分配列表和所述机器人分配列表,确定了每个工位分配的工序和机器人,在没有分配机器人的工位内,工位完成时间为工位内所有工序人工加工时间之和;对于分配机器人的工位,依照工序的排列顺序,分析当前工序的前驱工序情况,计算当前工序的理论加工开始时间,其中理论加工开始时间为当前工序的前驱工序完成时间的最大值;按照各工序理论加工开始时间的升序,对于每个工序,分别计算其可行加工方式的完成时间,选择完成时间最短的加工方式,所述可行加工方式的完成时间,等于所述可行加工方式的加工开始时间和所述可行加工方式的加工时间之和,其中所述加工开始时间为各工序理论加工开始时间和各工序加工资源空闲时间的最大值;所述各工位完成时间为工位内全部工序完成时间的最大值,所述目标值为所述各
工位完成时间中的最大值。
[0029]
每个工序的可行加工方式是每个工序能够使用的加工方式,包括以下至少一种:人工加工、机器人加工和人机协同加工,对于同一个工序来说,可行加工方式是已知的参数,每种可行加工方式的加工时间不同,也是已知的参数,且机器人加工的加工时间最长,人工加工次之,人机协同加工方式的加工时间最短。
[0030]
下面举例说明本发明实施例的计算目标值,也即装配线节拍时间,为装配线各工位完成时间中的最大值;假设装配线有10个工位,在一个工位内假设有工序1,工序2,按照加工顺序为每一个工序选择加工方式,比较工序1的可行加工方式,加工方式总共为人工加工、机器人加工和人机协同加工三种加工方式,但是因为并不是所有工序都能够由机器人或者人机协同来做,或者只能由某些型号的机器人或者人机协同来做,所以,每个工序都有可行加工方式,每个工序的可行加工方式是每个工序能够使用的加工方式,每个工序的可行加工方式是已知的参数,每个可行加工方式的加工时间也是已知的参数,且机器人加工的加工时间最长,人工加工次之,人机协同加工方式的加工时间最短,假设工序1可行加工方式为人工加工、机器人加工,选择加工时间最短的那种,人工加工的加工时间短于机器人加工的加工时间,此时工序1的加工方式确定为人工加工;接下来分配工序2的加工方式,假设其可行加工方式为人工加工、机器人加工和人机协同加工三种加工方式,在工序1加工方式为人工加工的前提下,如果工序2选择人工加工,因为这个工位只有这一个工人,这个工人必须等工序1完工,才能开始工序2,则这个可行加工方式的完成时间是工序1和工序2的人工加工时间之和,如果工序2选择机器人加工方式,因为这个工位的人工和机器人可以并行加工,工序2的机器人加工不需要等工序1的人工加工完成,则这个可行加工方式的完成时间是工序1人工加工时间和工序2机器人加工时间中的最大值,如果工序2选择人机协同加工,也要等工人完成工序1,则这个可行加工方式的完成时间是工序1人工加工时间和工序2人机协同加工时间之和,然后比较这三种加工方式的完成时间,选择完成时间最短的一种加工方式,作为工序2的加工方式;其他工位的工序的加工方式和完成时间也和这个工位类似得出;这个工位的工位完成时间为工位内全部工序完成时间的最大值,也即工序1的完成时间和工序2的完成时间中的最大值,所述目标值为10个工位的工位完成时间中的最大值。
[0031]
可选地,所述s33中的通过邻域操作不断寻找所述当前解i的邻域解,具体包括:对所述工序分配列表进行邻域操作,从所述工序分配列表中分配到入口线上的工序中随机选出两个工序,判断所述两个工序互相交换之后,是否满足正向工序优先关系,若满足则进行交换,若破坏优先关系的话,则不能交换,所述交换为两点交换,包括:从当前解的邻域解中随机选择两个入口线的工序分配列表,对所述两个入口线的工序分配列表,在相应位置随机设置两个交换点,将所述两个交换点之间的部分进行交换,如图5所示,从当前解的邻域解中随机选择两个入口线的工序分配列表,对所述两个入口线的工序分配列表,在相应位置随机设置两个交换点,入口线的工序分配列表1的工序3和入口线的工序分配列表2的工序2,及入口线的工序分配列表1的工序9和入口线的工序分配列表2的工序9,将所述两个交换点之间的部分,入口线的工序分配列表1的工序6、工序5、工序4、工序7、工序8和入口线的工序分配列表2的工序4、工序6、工序5、工序8、工序7进行交换;或者,
对所述工序分配列表进行邻域操作,从工序分配列表中分配到出口线上的工序中随机选出两个工序,判断所述两个工序互相交换之后,是否满足逆向工序优先关系,若满足则进行交换,若破坏优先关系的话,则不能交换,所述交换为两点交换,包括:从当前解的邻域解中随机选择两个出口线的工序分配列表,对所述两个出口线的工序分配列表,在相应位置分别随机设置两个交换点,将所述两个交换点之间的部分进行交换,如图6所示,从当前解的邻域解中随机选择两个出口线的工序分配列表,对所述两个出口线的工序分配列表,在相应位置随机设置两个交换点,出口线的工序分配列表1的工序11和出口线的工序分配列表2的工序17,及出口线的工序分配列表1的工序14和出口线的工序分配列表2的工序15,将所述两个交换点之间的部分,出口线的工序分配列表1的工序19、工序12、工序16、工序20、工序13和出口线的工序分配列表2的工序12、工序20、工序19、工序13、工序16进行交换;或者,对所述机器人列表进行单点交换,包括:从当前解的邻域解中随机选择两个机器人列表,对所述两个机器人分配列表,在相应位置分别随机设置一个交换点,将所述一个交换点之后的部分进行交换,如图8所示,从当前解的邻域解中随机选择两个机器人列表,对所述两个机器人分配列表,在相应位置分别随机设置一个交换点,机器人分配列表1的机器人3和机器人分配列表2的机器人4,将所述一个交换点之后的部分,机器人分配列表1的机器人1、机器人2和机器人分配列表2的机器人3、机器人1进行交换。
[0032]
可选地,所述s3还包括:设置迭代数阈值;可选地,所述迭代数阈值可以为5次;当多次迭代达到所述迭代数阈值,所述目标值仍没有改进时,执行重启程序来生成新的初始解,并对所述新的初始解,计算目标值,并重复s32-s35。
[0033]
另一方面,本发明实施例提供了一种人机协同u型装配线平衡问题的解决装置,所述装置包括:分解模块810,用于将人机协同u型装配线平衡问题 ualbp-hrc的原有问题分解为两个子问题,分别是工序分配子问题和机器人分配子问题;求解模块820,用于分别求出所述两个子问题的初始解决方案,由两个初始解决方案构成所述ualbp-hrc的初始解;迭代模块830,用于基于改进禁忌搜索算法框架,对所述初始解进行迭代获取最优方案。
[0034]
本发明实施例提供的一种人机协同u型装配线平衡问题的解决装置,其功能结构与本发明实施例提供的一种人机协同u型装配线平衡问题的解决方法相对应,在此不再赘述。
[0035]
图9是本发明实施例提供的一种电子设备900的结构示意图,该电子设备900可因配置或性能不同而产生比较大的差异,可以包括一个或一个以上处理器(central processing units,cpu)901和一个或一个以上的存储器902,其中,所述存储器902中存储有至少一条指令,所述至少一条指令由所述处理器901加载并执行以实现上述人机协同u型装配线平衡问题的解决方法的步骤。
[0036]
在示例性实施例中,还提供了一种计算机可读存储介质,例如包括指令的存储器,
上述指令可由终端中的处理器执行以完成上述人机协同u型装配线平衡问题的解决方法。例如,所述计算机可读存储介质可以是rom、随机存取存储器(ram)、cd-rom、磁带、软盘和光数据存储设备等。
[0037]
本领域普通技术人员可以理解实现上述实施例的全部或部分步骤可以通过硬件来完成,也可以通过程序来指令相关的硬件完成,所述的程序可以存储于一种计算机可读存储介质中,上述提到的存储介质可以是只读存储器,磁盘或光盘等。
[0038]
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。