技术特征:
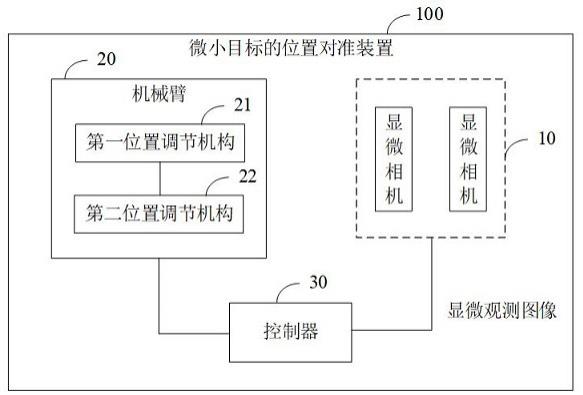
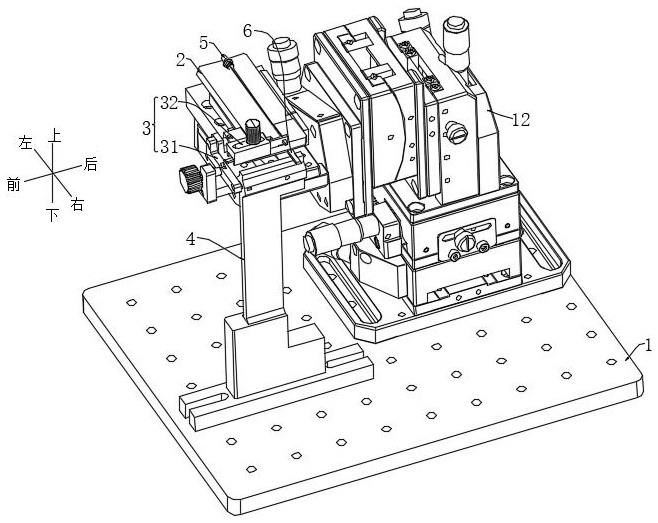
1.一种微小目标的位置对准装置,其特征在于,包括:至少两个显微相机、机械臂以及控制器,其中:所述机械臂包括相互连接的第一位置调节机构和第二位置调节机构;所述第一位置调节机构用于在第一移动范围内移动,以带动设置在所述第二位置调节机构末端的第一微小目标移动;所述第二位置调节机构用于在第二移动范围内移动,以带动所述第一微小目标移动;所述第二移动范围小于所述第一移动范围;每一所述显微相机与所述控制器连接,用于采集所述第一微小目标和预先放置的第二微小目标的显微观测图像,并将所述显微观测图像传输至所述控制器;所述控制器与所述机械臂连接,用于基于获取到的显微观测图像控制所述机械臂移动,以带动所述第一微小目标移动至目标对准位置,所述目标对准位置与所述第二微小目标所在的位置之间的偏移量与预设偏移量之间的差值小于第一偏移阈值。2.根据权利要求1所述的微小目标的位置对准装置,其特征在于,所述显微相机包括变倍显微镜;所述控制器与所述变倍显微镜连接,还用于调节所述变倍显微镜的放大倍率,以使所述显微相机采集不同放大倍率的显微观测图像;所述控制器还用于基于不同放大倍率的显微观测图像控制所述机械臂移动,以带动所述第一微小目标逐步趋近所述目标对准位置。3.根据权利要求1所述的微小目标的位置对准装置,其特征在于,多个显微相机的光轴汇聚在一个区域内,所述区域的面积小于预设的面积阈值;相邻两个显微相机之间的夹角大于预设的第一夹角阈值。4.根据权利要求1所述的微小目标的位置对准装置,其特征在于,还包括:相机位置调整机构,所述显微相机设置在所述相机位置调整机构上,所述相机位置调整机构用于调节所述显微相机的三维位置。5.根据权利要求4所述的微小目标的位置对准装置,其特征在于,所述相机位置调整机构包括至少两个物距调节台以及三维滑台,其中:每一所述显微相机设置在其对应的物距调节台上,所述显微相机的光轴与其对应物距调节台的运动轴之间的夹角小于预设的第二夹角阈值;所述三维滑台与所述物距调节台连接,用于带动设置在所述物距调节台上的显微相机移动,以调节所述显微相机的三维位置。6.一种微小目标的位置对准方法,应用于如权利要求1至5任一项所述的微小目标的位置对准装置,其特征在于,所述方法包括:控制机械臂在第一移动范围内移动,以带动所述第一微小目标趋近处于多个显微相机的共同视野中的第二微小目标;获取多个显微相机采集的所述第一微小目标和所述第二微小目标的显微观测数据,所述显微观测数据包括每一个显微相机采集的显微观测图像;基于所述显微观测数据控制机械臂在第二移动范围内移动,以带动所述第一微小目标移动至目标对准位置,所述目标对准位置与所述第二微小目标所在的位置之间的偏移量与预设偏移量之间的差值小于第一偏移阈值。7.根据权利要求6所述的微小目标的位置对准方法,其特征在于,所述基于所述显微观
测数据控制机械臂在第二移动范围内移动,以带动所述第一微小目标移动至目标对准位置,包括:设置每一所述显微相机的放大倍数为第二放大倍数,并基于所述显微观测数据获取所述第一微小目标的第一位置数据以及所述第二微小目标的第二位置数据;基于所述第一位置数据和所述第二位置数据控制所述机械臂移动所述第一微小目标,以使所述第一微小目标与所述第二微小目标的位置偏移向量为第一预设偏移向量;控制每一所述显微相机从第二放大倍数变倍至第三放大倍数,并基于所述显微观测数据获取所述第一微小目标的第三位置数据以及所述第二微小目标的第四位置数据;基于所述第三位置数据和所述第四位置数据控制机械臂移动所述第一微小目标,以使所述第一微小目标与所述第二微小目标的位置偏移向量为第二预设偏移向量。8.根据权利要求7所述的微小目标的位置对准方法,其特征在于,所述基于所述第一位置数据和所述第二位置数据控制所述机械臂移动所述第一微小目标,以使所述第一微小目标与所述第二微小目标的位置偏移向量为第一预设偏移向量,包括:基于所述第一位置数据和所述第二位置数据,获取所述第一微小目标与所述第二微小目标的第一位置偏移向量;获取机械臂带动所述第一微小目标在末端坐标系中移动的位移与所述第一微小目标在所述显微相机采集的显微观测图像中的位移之间的第一映射关系;基于所述第一位置偏移向量、所述机械臂的姿态矩阵、所述第一映射关系、所述第二放大倍数和所述第一预设偏移向量,获取所述机械臂的第一移动量,并基于所述第一移动量控制所述机械臂中的第一位置调节机构或第二位置调节机构进行增量式移动;重复执行上述步骤,直到所述第一移动量中所有元素的绝对值小于第一设定阈值。9.根据权利要求7所述的微小目标的位置对准方法,其特征在于,所述基于所述第三位置数据和所述第四位置数据控制机械臂移动所述第一微小目标,以使所述第一微小目标与所述第二微小目标的位置偏移向量为第二预设偏移向量,包括:基于所述第三位置数据和所述第四位置数据,获取所述第一微小目标与所述第二微小目标的第二位置偏移向量;获取机械臂带动所述第一微小目标在末端坐标系中移动的位移与所述第一微小目标在所述显微相机采集的显微观测图像中的位移之间的第一映射关系;基于所述第二位置偏移向量、所述机械臂的姿态矩阵、所述第一映射关系、所述第三放大倍数和所述第二预设偏移向量获取所述机械臂的第二移动量,并基于所述第二移动量控制所述机械臂中的第二位置调节机构中的第二位置调节机构进行增量式移动;重复执行上述步骤,直到所述第二移动量中所有元素的绝对值小于第二设定阈值。10.根据权利要求7所述的微小目标的位置对准方法,其特征在于,在所述控制每一所述显微相机从第二放大倍数变倍至第三放大倍之前,所述方法还包括:设置所述显微相机的放大倍数为第二放大倍数,并获取预先标定的多个显微相机的显微观测图像中的第一期望位置,得到多个第一期望位置;基于所述多个第一期望位置调整所述显微相机与所述第二微小目标之间的相对位置,以使在所述显微相机的放大倍数从第二放大倍数切换至第三放大倍数的情况下,所述第二微小目标位于所述显微观测图像中的第二期望位置;所述第二期望位置与所述显微观测图
像的中心位置之间的偏移量小于第二偏移阈值。11.根据权利要求10所述的微小目标的位置对准方法,其特征在于,所述基于所述多个第一期望位置调整所述显微相机与所述第二微小目标之间的相对位置,包括:设置每一所述显微相机的放大倍数为第二放大倍数,并所述显微观测数据获取所述第二微小目标的第二位置数据;基于多个第一期望位置和所述第二位置数据获取第三位置偏移向量;获取所述显微相机的位移与第二微小目标在所述显微相机采集的显微观测图像中的位移的第二映射关系;基于所述第三位置偏移向量和所述第二映射关系获取所述微小目标的位置对准装置中的相机位置调整机构的第三移动量:基于所述第三移动量控制所述微小目标的位置对准装置中的相机位置调整机构进行增量式运动;重复执行上述步骤,直到所述第三位置偏移向量或者所述第三移动量中所有元素的绝对值小于第三设定阈值。
技术总结
本发明提供一种微小目标的位置对准方法和装置,涉及控制技术领域,装置包括:至少两个显微相机、机械臂以及控制器,其中:机械臂包括相互连接的第一位置调节机构和第二位置调节机构;第一位置调节机构用于在第一移动范围内移动,以带动设置在第二位置调节机构末端的第一微小目标移动;第二位置调节机构用于在第二移动范围内移动,以带动第一微小目标移动;每一显微相机与控制器连接,用于采集第一微小目标和预先放置的第二微小目标的显微观测图像并传输至控制器;控制器与机械臂连接,用于基于获取到的显微观测图像控制机械臂移动,以带动第一微小目标移动至目标对准位置,解决了如何更好地实现对微小目标的位置对准的技术问题。题。题。
技术研发人员:秦方博 徐德 张大朋 余山
受保护的技术使用者:中国科学院自动化研究所
技术研发日:2022.11.29
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。