1.本发明主要涉及无人机技术领域,具体涉及一种无人机翻转支架。
背景技术:
2.无人机是现代军事演习中最为常见、应用最为广泛的一类飞行器,无人机发射多为火箭助推发射,其出厂前需经过推力线测量,判断火箭推力线与无人机重心位置关系,传统的小无人机在进行推力线测量时,由于其重量轻、尺寸小,普遍采用直接吊挂测量方式,即将无人机沿机身轴线翻转180
°
,然后行吊直接将无人机吊起。
3.随着军事演习要求的提高,小无人机逐渐不能满足演习需要,越来越多的大尺寸无人机进入演习中来,而大尺寸无人机普遍长度较长,重量较重,不易直接吊起,需将无人机沿展向翻转至一定角度,才能连接推力线测量组件,对大尺寸无人机翻转也需要相应的翻转工装。
4.发明人在具体的实施例操作过程中,发现了以下缺陷:现有技术中对大尺寸无人机翻转的工装结构复杂,制造困难,不便于无人机沿其轴线翻转和展向翻转的问题。
技术实现要素:
5.发明要解决的技术问题本发明的提供了一种无人机翻转支架,用以解决上述背景技术中存在大尺寸无人机翻转的工装结构复杂,制造困难,不便于无人机沿其轴线翻转和展向翻转的技术问题。
6.技术方案为达到上述目的,本发明提供的技术方案为:一种无人机翻转支架,包括对称设置的支撑架,所述支撑架上设有多个限位件,所述限位件之间形成框形支撑空间,所述框形支撑空间滑动连接转动盘,所述转动盘由可拆卸连接第一弧形板与第二弧形板组成,所述第一弧形板与第二弧形板之间可放置无人机。
7.进一步的,还包括支撑底座,所述支撑底座顶部设有多组支撑柱,每组支撑柱之间通过第一连接柱与第二连接柱相连接,所述第一连接柱与所述第二连接柱上设有所述支撑架,所述支撑架为倒八字支撑架,所述倒八字支撑架端部内侧对称设有所述限位件,所述第二连接柱顶部设有所述限位件。
8.进一步的,所述支撑底座两侧分别设有定位装置,所述支撑底座底部四角安装有万向轮,所述定位装置包括定位块,所述定位块可拆卸所述支撑底座侧面,所述定位块外侧设有固定环,所述固定环螺纹连接升降柱,所述升降柱底部连接圆形橡胶垫。
9.进一步的,所述支撑柱有两组,分别设置在所述支撑底座两端,所述底座与所述支撑柱连接处设有三角挡板。
10.进一步的,所述支撑底座中部设有对称设有加固柱,所述加固柱铰接第二支撑柱,所述第二支撑柱另一端铰接所述第一连接柱。
11.进一步的,所述支撑底座与所述支撑柱铰接,所述支撑底座两侧对称设有容纳缺口,所述容纳缺口匹配连接所述加固柱。
12.进一步的,所述限位件包括凹形支撑块,所述凹形支撑块顶部的凹口两侧开有滑动孔,所述滑动孔转动连接凹形圆卡块,所述凹形圆卡块匹配连接所述转动盘。
13.进一步的,所述凹形支撑块侧面连接l形支撑块,所述l形支撑块顶部连接转动电机,所述转动电机输出轴穿过所述凹形支撑块连接所述凹形圆卡块的转动轴,所述凹形圆卡块内设有卡齿,所述转动盘外侧设有对应的卡齿。
14.进一步的,所述第二连接柱顶面中部连接t形块,所述t形块顶部突起设于所述转动盘侧面,并开有第一定位孔,所述第一弧形板与第二弧形板上分别开有对应的第二定位孔。
15.进一步的,所述第一弧形板与所述第二弧形板中部开有配合无人机的容纳槽,所述第一弧形板与第二弧形板相交处通过螺丝可拆卸连接。
16.有益效果采用本发明提供的技术方案,与现有技术相比,具有如下有益效果:本发明设计合理,将无人机置于翻转台架上,在进行检测或者测试无人机的各项参数时,可以通过转动以改变无人机的状态,使其翻转至所需角度,为无人机的参数测量提供良好的环境,且无人机在翻转以及测量过程中位置牢固,便于控制,安全可靠;为了进一步的便于无人机参数的测量,在凹形支撑块设置转动电机可以解放双手,自动的对无人机进行翻转。
附图说明
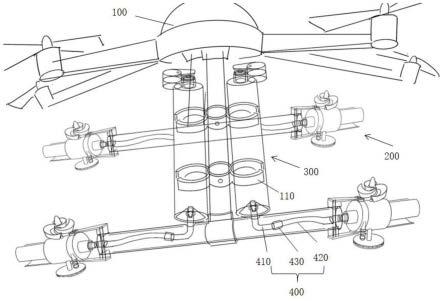
17.图1为本发明的结构示意图;图2为本发明的定位装置结构示意图;图3为本发明的另一实施例结构示意图;图4为本发明的限位件结构示意图;图5为本发明的t形块结构示意图。
18.附图标记1、支撑架;11、倒八字支撑架;2、限位件;21、凹形支撑块;211、l形支撑块;212、转动电机;22、滑动孔;23、凹形圆卡块;3、转动盘;4、第一弧形板;5、第二弧形板;6、支撑底座;61、定位装置;62、万向轮;63、定位块;64、固定环;65、升降柱;66、圆形橡胶垫;7、支撑柱;71、三角挡板;72、加固柱;73、第二支撑柱;74、容纳缺口;8、第一连接柱;9、第二连接柱;91、t形块;92、第一定位孔;93、第二定位孔。
具体实施方式
19.为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述,附图中给出了本发明的若干实施例,但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施例,相反地,提供这些实施例的目的是使对本发明的公开内容更加透彻全面。
20.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“页”、“底”“内”、“外”、"顺时
针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
21.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
22.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”、“设有”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
实施例
23.参照附图1-5,一种无人机翻转支架,包括对称设置的支撑架1,支撑架1上设有多个限位件2,限位件2之间形成框形支撑空间,框形支撑空间滑动连接转动盘3,转动盘3由可拆卸连接第一弧形板4与第二弧形板5组成,第一弧形板4与第二弧形板5之间可放置无人机,本装置工作时,将无人机放置在第一弧形板4上,在将第二弧形板5与第一弧形板4连接,对无人机形成限位,需要注意的是,第一弧形板4与第二弧形板5均可以放置在底部的两个限位件2之间,放置无人机后在将另一半与其连接,对无人机限位之后,可以转动无人机,使无人机两端的转动盘3在限位件2上转动,从而便于无人机翻转。
24.还包括支撑底座6,支撑底座6顶部设有多组支撑柱7,每组支撑柱7之间通过第一连接柱8与第二连接柱9相连接,第一连接柱8与第二连接柱9上设有支撑架1,支撑架1为倒八字支撑架11,倒八字支撑架11端部内侧对称设有限位件2,第二连接柱9顶部设有限位件2,支撑底座6为整个装置提供支撑力,第一连接柱8与第二连接柱9可以加强整体的牢固性,此处选取倒八字支撑架11来安装四个限位件2,形成框形支撑空间,是生产人员根据实际情况选取的成本交底与效果较好的方式,需要注意的是,支撑架1只要可以配合限位件2形成一个弧形空间配合转动部转动即可,对其具体的设计形状在此不做限定,合限位件2的数量也不做限定。
25.支撑底座6两侧分别设有定位装置61,支撑底座6底部四角安装有万向轮62,定位装置61包括定位块63,定位块63可拆卸支撑底座6侧面,定位块63外侧设有固定环64,固定环64螺纹连接升降柱65,升降柱65底部连接圆形橡胶垫66,为了便于本装置的移动,在底部设置万向轮62,万向轮62自带刹车片,为了进一步提高装置的稳定性,设置定位装置61,当本装置移动到指定位置后,刹车片对万向轮62进行限位,此时在转动升降柱65,升降柱65螺旋向下移动,从而将底部的圆形橡胶垫66与地面接触,完成加固定位,需要移动时反方向转动升降柱65即可。
26.支撑柱7有两组,分别设置在支撑底座6两端,底座与支撑柱7连接处设有三角挡板71,为了进一步加强整体结构强度,在支撑底座6与与支撑柱7相交处设置三角挡板71来对两个支撑的部件进行进一步加固。
27.支撑底座6中部设有对称设有加固柱72,加固柱72铰接第二支撑柱73,第二支撑柱73另一端铰接第一连接柱8,为了提高整体的强度,设置第二支撑柱73,通过可拆卸的铰接方式对两端进行支撑。
28.参照图3,支撑底座6与支撑柱7铰接,支撑底座6两侧对称设有容纳缺口74,容纳缺口74匹配连接加固柱72,由于支撑柱7有一定的高度,整体的空间占用率较高,将支撑底座6与支撑柱7设为铰接的方式,在移动或者不使用时,可以将第一支撑柱7与第一连接柱8的一端拆下,将第一支撑柱7放置在容纳缺口74内,在将支撑柱7与上面连接的部位向内折叠,从而节约整体的空间,此装置可以对较长的无人机进行翻转。
29.限位件2包括凹形支撑块21,凹形支撑块21顶部的凹口两侧开有滑动孔22,滑动孔22转动连接凹形圆卡块23,凹形圆卡块23匹配连接转动盘3,限位件2可以将转动盘3卡接在凹口内转动,工作时将转动盘3的一半放置在几个限位件2组成的框形支撑空间内,将无人机与转动盘3连接后,转动盘3整体可以在凹形圆卡块23内滑动。
30.凹形支撑块21侧面连接l形支撑块211,l形支撑块211顶部连接转动电机212,转动电机212输出轴穿过凹形支撑块21连接凹形圆卡块23的转动轴,凹形圆卡块23内设有卡齿,转动盘3外侧设有对应的卡齿,为了便于无人机的翻转作业,在凹形支撑块21侧面设置转动电机212,且凹形圆卡块23内的卡齿与与转动盘3外侧卡齿对应,可以通过转动电机212对无人机自动进行翻转作业。。
31.第二连接柱9顶面中部连接t形块91,t形块91顶部突起设于转动盘3侧面,并开有第一定位孔92,第一弧形板4与第二弧形板5上分别开有对应的第二定位孔93,为了便于对转动盘3的限位,防止无人机在放入转动盘3时,转动盘3会摆动,设置一个t形块91,在无人机放入转动盘3内前,将第一弧形板4或第二弧形板5底部的第二定位孔93,通过限位螺丝与第一定位孔92连接。
32.第一弧形板4与第二弧形板5中部开有配合无人机的容纳槽,第一弧形板4与第二弧形板5相交处通过螺丝可拆卸连接,容纳槽可与预定的无人机型号外形相匹配,便于无人机的定位。
33.以上所述实施例仅表达了本发明的某种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制;应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围;因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。