基于双向动态载荷模拟加载的数控车床刀架与主轴在位可靠性试验系统
1.技术领域
2.本发明属于数控机床关键功能部件可靠性领域的试验装置,更确切地说,本发明涉及一种能够对数控机床刀架与主轴功能部件进行动、静态切削载荷模拟加载的在位可靠性试验系统。
背景技术:
3.近几年随着装备制造业的快速发展,我国已成为数控机床生产及应用的大国,目前国内研发的数控机床在精度、速度、大型化和多轴联动方面取得了明显进展。但随着功能的增多,故障隐患增多,先进功能和性能指标不能维持,可靠性问题严重,已经成为企业、用户与销售市场关注的焦点和数控机床产业发展的瓶颈。国产数控机床可靠性水平偏低的主要原因之一是国产数控机床关键功能部件的可靠性水平较低,因此研究开发数控机床关键功能部件在位可靠性试验装置和试验技术,通过开展可靠性试验能够充分激发和暴露潜在故障,为探究故障机理、开展可靠性评估等研究提供基础数据,具有重要的理论研究意义和工程应用价值。刀架与主轴作为高端数控车床的关键功能部件之一,其自身的可靠性水平对整机的可靠性水平有重要的影响。
4.我国的数控机床关键功能部件可靠性试验研究起步较晚,目前仅有单一机床关键功能部件的可靠性试验装置,尚未有能够同时对两个及以上机床关键功能部件在位开展能够模拟实际工况载荷加载的可靠性试验装置或者系统。
技术实现要素:
5.本发明的目的是为了解决上述问题,而提供一种基于双向动态载荷模拟加载的数控车床刀架与主轴在位可靠性试验系统。
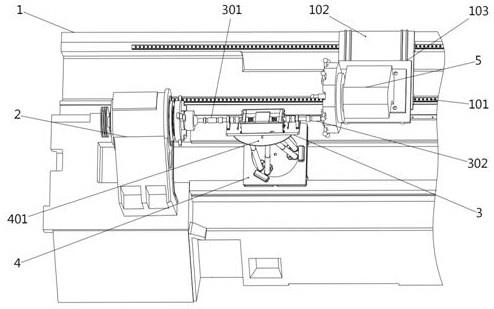
6.基于双向动态载荷模拟加载的数控车床刀架与主轴在位可靠性试验系统,它包括:车床床身104、滑块台103、刀架部分5、机床主轴201、动态载荷发生装置、动态载荷加载支撑装置、承载部分4;所述的刀架部分5安装在滑块台103上,滑块台103通过x向导轨101、y向导轨102在车床床身104上滑动;所述的机床主轴201轴接在车床床身104上,机床主轴201设有卡盘202、球铰链座203、球铰链204;所述的动态载荷加载支撑装置包括:支撑底座311、1号导杆316、2号导杆322,支撑底座311安装在承载部分4上方,承载部分4安装在车床床身104;1号导杆316、2号导杆322两端固定在支撑底座311上
所述的动态载荷发生装置包括:包括螺纹加载头301、1号力传感器303、1号柔性体317、直线电机定子319、2号柔性体318、2号力传感器304和球槽加载头302,它们依次连接;直线电机定子319两侧套接在1号导杆316、2号导杆322上,直线电机定子安装在支撑底座311上;所述的螺纹加载头301与球铰链204连接。
7.所述的柔性体是一个弹簧体,弹簧体轴线处设有相互嵌套的可伸缩导杆,。
8.所述的螺纹加载头301左端与球铰链204螺纹连接,螺纹加载头301右端与1号力传感器303螺纹连接;螺纹加载头301左端螺纹大于右端螺纹。
9.所述的直线电机定子319两端对称设置两个控距套;控距套用于调解控制动态载荷发生装置的长度。
10.所述的动态载荷发生装置各部件之间设有传力棒,传力棒与支撑底座311轴接。
11.所述的刀架部分5设有模拟切削刀杆501,加载部为球体,与球槽加载头302加载部的球槽相对应。
12.所述的承载部分4为六自由度平台。
13.所述的承载部分4包括旋转板401、六自由度平台底板402、六自由度平台顶板403、内推力棒404、外推力棒405、驱动电机406、液压泵407、液压推力棒408、移动槽板409、连接轴承410、旋转轴411、1号紧固螺栓412、2号紧固螺栓413、3号紧固螺栓414;所述的旋转板401为圆形板状结构件,旋转板401的两侧开有两个条形通孔,两个条形通孔的中间部位为矩形,两侧为圆弧形,用于和支撑底座311的螺栓连接;旋转板401的中心部位均布有六个螺纹通孔用于和六自由度平台顶板403的螺栓连接。
14.本发明提供了基于双向动态载荷模拟加载的数控车床刀架与主轴在位可靠性试验系统,它包括:车床床身104、滑块台103、刀架部分5、机床主轴201、动态载荷发生装置、动态载荷加载支撑装置、六自由度平台;所述的动态载荷发生装置包括:包括螺纹加载头301、1号力传感器303、1号柔性体317、直线电机定子319、2号柔性体318、2号力传感器304和球槽加载头302,它们依次连接。
15.与现有技术相比本发明的有益效果是:1.本发明所述的基于双向动态载荷模拟加载的数控车床刀架与主轴在位可靠性试验系统是能够同时对机床刀架和主轴两个关键功能部件在位开展模拟实际工况载荷加载的可靠性试验系统。利用载荷加载部分能够同时对两个功能部件模拟施加动静态切削载荷,能够为开展具有模拟实际工况载荷加载的可靠性试验提供试验系统方案。
16.2.本发明所述的基于双向动态载荷模拟加载的数控车床刀架与主轴在位可靠性试验系统中的载荷加载部分能够实现动、静态切削力模拟加载,通过控制直线电机的位移和速度实现动、静态切削载荷大小和频率的变换,同时也可以通过更换不同材料的柔性体来改变动、静态切削载荷幅值和加载频率的变化,具有较高的灵活性。
17.3. 本发明所述的基于双向动态载荷模拟加载的数控车床刀架与主轴在位可靠性试验系统不需要单独搭建试验环境,能够在原有的数控车床上进行在位可靠性试验,降低了数控机床可靠性试验的复杂性,体现了本试验系统的通用性。
18.附图说明
19.下面结合附图对本发明作进一步的说明:图1为本发明所述的基于双向动态载荷模拟加载的数控车床刀架与主轴在位可靠性试验系统的轴测投影图;图2为本发明所述的基于双向动态载荷模拟加载的数控车床刀架与主轴在位可靠性试验系统中载荷加载部分和主轴部分连接状态的轴测投影图;图3 为本发明所述的基于双向动态载荷模拟加载的数控车床刀架与主轴在位可靠性试验系统中载荷加载部分和刀架部分连接状态的轴测投影图;图4为本发明所述的基于双向动态载荷模拟加载的数控车床刀架与主轴在位可靠性试验系统中承载部分和加载部分的轴测投影图;图5为本发明所述的基于双向动态载荷模拟加载的数控车床刀架与主轴在位可靠性试验系统的加载部分的轴测投影图;图6为本发明所述的基于双向动态载荷模拟加载的数控车床刀架与主轴在位可靠性试验系统中承载部分的轴测投影图;图7为本发明所述的基于双向动态载荷模拟加载的数控车床刀架与主轴在位可靠性试验系统中加载部分与承载部分连接处的分解轴测投影图;图8为本发明所述的基于双向动态载荷模拟加载的数控车床刀架与主轴在位可靠性试验系统中加载部分(除中心部分外)的分解轴测投影图;图9为本发明所述的基于双向动态载荷模拟加载的数控车床刀架与主轴在位可靠性试验系统加载部分的中心部分的分解轴测投影图;(图中:1. 车床基础部分,2.主轴部分,3.载荷加载部分,4.承载部分,5.刀架部分。101.x向导轨,102.y向导轨,103.滑块台,104.车床床身,201.机床主轴,202.卡盘,203.球铰链座,204.球铰链,301.螺纹加载头,302.球槽加载头,303.1号力传感器,304.2号力传感器,305.1号轴承座,306.2号轴承座,307.1号控距套,308.2号控距套,309.1号传力棒,310.2号传力棒,311.支撑底座,312.1号侧板,313.2号侧板,314.1号连接杆座,315.2号连接杆座,316.1号导杆,317.1号柔性体,318.2号柔性体,319.直线电机定子,320.1号电机挡板,321.2号电机挡板,322.2号导杆,323.1号轴承,324.2号轴承,401.旋转板,402.六自由平台底板,403.六自由度平台顶板,404.内推力棒,405.外推力棒,406.驱动电机,407.液压泵,408.液压推力棒,409.移动槽板,410.连接轴承,411.旋转轴,412.1号紧固螺栓,413.2号紧固螺栓,414.3号紧固螺栓,501.模拟切削刀杆,502.数控刀架,503.模拟切削刀座)。
具体实施方式
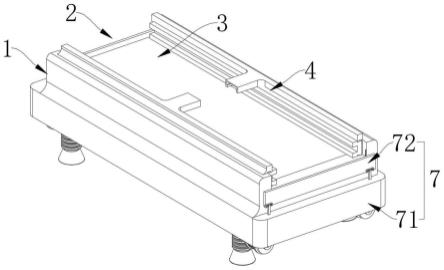
20.下面结合附图对本发明作详细的描述:参阅图1,本发明所述的基于双向动态载荷模拟加载的数控车床刀架与主轴在位可靠性试验系统由车床基础部分(1)、主轴部分(2)、载荷加载部分(3)、承载部分4和刀架部分5组成。
21.一. 车床部分
所述的车床基础部分1包括x向导轨101、y向导轨102、滑块台103和车床床身104。
22.所述的x向导轨101为滑动导轨或者滚动导轨,通过螺栓与车身紧固。所述的y向导轨102也是滑动导轨或者滚动导轨。所述的滑块台103底面固定四个滑块与y向导轨102配合,滑块台103上表面通过螺栓和刀架502紧固连接。所述的车床床身104为数控车床的车身部件,车床床身104上端有用于安装x向导轨101的凸台,左端有一个平台用于安装机床主轴201,中部有一对导轨,用于安装数控车床的尾座。
23.二.主轴部分参阅图1与图2,所述的主轴部分2包括机床主轴201、卡盘202、球铰链座203、球铰链204。
24.所述的机床主轴201为数控车床夹持工件的主轴,可以是机械主轴,也可以是电主轴,机床主轴201的下端通过螺栓固定连接在床身104上,机床主轴201的右端前部固定安装有卡盘202。所述的卡盘202可以是三爪卡盘或者四爪卡盘,卡盘202右前端装卡着球铰链座203的左圆柱端。所述的球铰链座203为圆柱形结构,球铰链座203的右前端中有一球形凹槽用来连接球铰链204,球铰链座203左圆柱端被卡盘202夹紧固定。所述的球铰链204右端为柱体,具有外螺纹,与螺纹加载头301的内螺纹形成螺纹连接,球铰链204中间的圆环肋用来防止球铰链204和螺纹加载头301螺纹连接松动。
25.三.载荷加载部分参阅图1-5、图8和图9,所述的载荷加载部分3分为动态载荷发生装置和动态载荷加载支撑装置。
26.1.动态载荷加载支撑装置参阅图4、图5、图8和图9,所述的动态载荷加载支撑装置由支撑底座311、1号轴承座305、2号轴承座306、1号轴承323、2号轴承324、1号电机挡板320、2号电机挡板321、1号侧板312、2号侧板313、1号导杆316、2号导杆322。
27.所述的支撑底座311为长方体形的板式结构件,支撑底座311的前后两端分别打有四个均布的螺纹孔用以和1号轴承座305、2号轴承座306连接,每四个螺纹孔中间打有凹槽用于和1号轴承座305、2号轴承座306的底部凸台配合。在支撑底座311上距离前后两侧一段距离处各打有一个条形通孔,中部为长方形,两侧为圆弧形,用于和旋转板401的螺栓紧固连接。支撑底座311的两个条形通孔内侧一定距离处有两个长方形凹槽分别用于配合1号电机挡板320和2号电机挡板321的凸台部分,并且打有螺纹孔用于1号电机挡板320和2号电机挡板321的紧固。支撑底座311的上端中间部位有几个一定高度的长方形凸台,长方形凸台的间隙用于安装驱动直线电机定子319的导线。
28.所述的1号轴承座305和2号轴承座306结构相同,均为板状结构件,上端为半圆弧形,下端为长方形,1号轴承座305和2号轴承座306在上部前后向打有通孔用于和1号轴承323、2号轴承324的过盈配合,1号轴承座305和2号轴承座306的下端距下底面一定距离处有两个侧板,1号轴承座305和2号轴承座306的侧板上有螺纹通孔用于和支撑底座311的紧固连接。所述的1号轴承323和2号轴承324为标准轴承,1号轴承323和2号轴承324分别与1号轴承座305和2号轴承座306的通孔进行过盈配合,配合轴承并固定轴承座后的1号轴承323和2号轴承324应保持同心。
29.所述的1号电机挡板320和2号电机挡板321结构相同,均为长方形的板式结构件,1
号电机挡板320和2号电机挡板321的上部有三个圆形通孔,中间的通孔较大,用于和1号连接杆座314的间隙配合,两侧的圆形通孔较小,用于和1号导杆316、2号导轨322的间隙配合,1号电机挡板320和2号电机挡板321的两侧分别均布有6个螺纹孔用于1号侧板312、2号侧板313的螺纹连接,1号电机挡板320和2号电机挡板321的下端距底部一段距离处有六个均布的侧板,每个侧板上打有四个通孔用于螺栓紧固件将固定1号电机挡板320和2号电机挡板321于支撑底座311上。1号电机挡板320和2号电机挡板321下端部的凸台用于和支撑底座311上凹槽的过渡配合。
30.所述的1号侧板312与2号侧板313为u形板状结构体,1号侧板312与2号侧板313的右端下部开有一个矩形通孔用于驱动导线进出口,1号侧板312与2号侧板313的前后两个板面上各有个圆形通孔,每组圆形通孔与1号电机挡板320和2号电机挡板321端面上的螺纹孔适配,用于螺纹紧固件的连接。所述的1号导杆316、2号导杆322为圆柱状结构件,1号导杆316、2号导杆322的圆截面直径与1号电机挡板320和2号电机挡板321的两侧的通孔直径相同,长度与1号侧板312和2号侧板313的内侧两断面间得距离相同。
31.2.动态载荷加载装置参阅图5、图8和图9,所述的动态载荷加载装置包括螺纹加载头301、球槽加载头302、1号力传感器303、2号力传感器304、1号控距套307、2号控距套308、1号连接杆座314、1号柔性体317、2号柔性体318、直线电机定子319。
32.参阅图1、图2和图3,所述的螺纹加载头301为圆柱结构,螺纹加载头301的刚性较大,在较大力加载的情况下变形量较小,螺纹加载头301左端的较大螺纹孔用于和球铰链204的右端外螺纹进行螺纹连接,螺纹加载头301右端有小螺纹孔用于和1号力传感器303进行螺纹连接。所述的球槽加载头302结构与螺纹加载头301一样,球槽加载头302的右端开有球形的凹槽与模拟切削刀杆501相配合,用于传递动态力于模拟切削刀杆501上,球槽加载头302的左后端部开有螺纹孔用于和2号力传感器304的连接。所述的1号力传感器303和2号力传感器304结构也相同,1号力传感器303和2号力传感器304两端都有突出的螺纹柱部分用于和螺纹加载头301、球槽加载头302、1号传力棒309和2号传力棒310的连接,1号力传感器303和2号力传感器304都具有较大的刚度。
33.由于此动态载荷加载装置除加载头外左右结构对称且材料相同,因此下面仅说明左侧结构。
34.所述的1号传力棒309为棒状,刚性较高, 1号传力棒309的左前端开有螺纹孔用于和1号力传感器303进行连接,1号传力棒309的右后端圆柱面上为外螺纹结构,用于和1号控距套307的连接。所述的1号控距套307为圆柱状刚性结构,1号控距套307中间部分沿着四个垂直方向切削出了四个平直的槽,便于外界夹持对其进行旋转,1号控距套307两端部分别开有两个螺纹旋向相反的螺纹孔用于与1号传力棒309和1号连接杆座314连接,通过旋转1号控距套307可以调节1号传力棒309的伸缩量,并以此控制螺纹加载头301和直线电机定子319之间的距离,为了使螺纹连接更加紧固,可以在1号控距套307的两侧添加两个螺母进行防松设计。
35.所述的1号连接杆座314为圆柱式刚性结构,1号连接杆座314分为三个部分,前端部分为一个实体圆柱刚性结构,1号连接杆座314左端外表面打有外螺纹用于和1号控距套307的螺纹连接。1号连接杆座314的后端为圆筒式设计便于柔性体的安装,1号连接杆座314
右后端中心有一段较为细小的圆柱体杆用于和直线电机定子319的配合与导向。所属的1号柔性体317为柔性环状结构(本发明专利以弹簧为例),1号柔性体317两端为平面圆环结构用于与1号连接杆座314和直线电机定子319的配合连接。所述的直线电机定子319为长方形板状结构,直线电机定子319的两端分别开有两个圆形通孔用于和1号导杆316与2号导杆322相配合,以便沿着正确方向移动,直线电机定子319的中心部位填充有较大永磁体用于电机的运动驱动,直线电机定子319的左右两端有两个圆筒式结构用于和1号柔性体317与2号柔性体318的配合,直线电机定子319的前后两端的中心有一个较小圆筒结构用于和1号连接杆座314与2号连接杆座315的配合并进行导向。
36.四、承载部分参阅图4、图6和图7,所述的承载部分4包括旋转板401、六自由度平台底板402、六自由度平台顶板403、内推力棒404、外推力棒405、驱动电机406、液压泵407、液压推力棒408、移动槽板409、连接轴承410、旋转轴411、1号紧固螺栓412、2号紧固螺栓413、3号紧固螺栓414。
37.所述的旋转板401为圆形板状结构件,旋转板401的两侧开有两个条形通孔,两个条形通孔的中间部位为矩形,两侧为圆弧形,用于和支撑底座311的螺栓连接。旋转板401的中心部位均布有六个螺纹通孔用于和六自由度平台顶板403的螺栓连接。旋转板401的最中心位置为一个圆形通孔,该圆形通孔的直径与连接轴承410外径相同,此圆形通孔与连接轴承410进行过盈配合。旋转板401的侧面沿径向有一个条形通孔,在与支撑底座311和六自由度平台顶板403配合后,旋转板401的条形通孔能够显露出下方六自由度平台顶板403的刻度线用于调整上方直线电机的角度。六自由度平台顶板403为圆形板状结构件,六自由度平台顶板403的下方有三个均布的凸台,每个凸台上有两个螺纹孔用于插头的紧固。六自由度平台顶板403最中心部位有一个圆柱通孔,其直径与旋转轴411的最大圆柱直径相同,并与旋转轴411的最大圆柱部分进行过盈配合。六自由度平台顶板403沿中心通孔周围有三个圆弧形条形通孔用于和旋转板401与1号紧固螺栓412、2号紧固螺栓413、3号紧固螺栓414进行螺栓连接。所述的连接轴承410与旋转轴411和旋转板401的通孔为同轴配合,连接轴承410与旋转板401的通孔为过盈配合。所述的旋转轴411的轴肩与六自由度平台顶板403的中心通孔为过盈配合。在配合好的支撑底座311和旋转板401与连接轴承410与旋转轴411与六自由度平台顶板403的装置中,旋转板401可以绕着旋转轴411进行旋转以调整方向,并通过1号紧固螺栓412、2号紧固螺栓413、3号紧固螺栓414三个螺栓件进行位置的固定。
38.(由于六自由度平台的6个驱动装置相同,本发明专利简述其中一个驱动装置结构)所述的内推力棒404为圆柱状结构,内推力棒404其上端存在一环形插孔,通过此插孔与销连接装置连接内推力棒404到六自由度平台顶板403上,内推力棒404内部使用滚珠丝杠结构控制其上升高度(直线电机驱动适用,液压装置需用油箱)。所述的外推力棒405为圆筒状结构,外推力棒405焊接在一个平板上,内部与内推力棒404相配合,外推力棒405的下端通过一平板及上的插孔与六自由度平台底板402进行螺纹结构连接,外推力棒405下端与驱动电机406进行开孔连接,确保驱动电机406正常工作并推动内推力棒404。所述的驱动电机406为步进电机,驱动电机406能驱动并控制内推力棒404的高度,驱动电机406通过焊接紧固在外推力棒405所附带的平板上。六自由度平台底板402为板状结构件,由上平板和下端槽板焊接而成,六自由度平台底板402的上端板的上端面均布有三个凸台,每个凸台侧面有
三个螺纹孔用于插头紧固并进行与外推力棒405的连接。六自由度平台底板402的下端槽板一侧有一较厚的肋板,肋板一侧用于依靠车床床身104的l形板,肋板上分两部分打有四个螺纹孔用于和液压泵407的连接,六自由度平台底板402的下端槽板另一侧上端开有一定距离的t形槽用于导向移动槽板409的运动。所述的液压泵407和液压推力棒408为液压装置,本专利中四个液压装置相同,此处仅仅说明一个,液压泵407的底部有一四角开有通孔的平板用于和六自由度平台底板402的肋上的螺纹孔进行螺纹连接。液压推力棒408的距离液压泵407较远的头部为橡胶套结构用于更好的推动移动槽板409。所述的移动槽板409为l形板状结构,其上端部切割为t形结构用于配合六自由度平台底板402并进行移动。液压推力棒408给移动槽板409施加正压力使移动槽板409和六自由度平台底板402通过摩擦力固定在车床床身104的倒l形导板上。
39.五、刀架部分参阅图1和图3,刀架部分包括模拟切削刀杆501、数控刀架502、模拟切削刀座503。
40.切削模拟刀杆501是一横截面为圆形的杆类结构件,模拟切削刀杆501的一端部和一球体连成一体。切削模拟刀杆501装卡在模拟切削刀座503上,两者一起被装卡到数控刀架502的刀盘上,代替刀具对其实施可靠性试验。
41.所述的数控刀架502底部通过螺栓与滑块台103固定连接。
42.基于双向动态载荷模拟加载的数控车床刀架与主轴在位可靠性试验系统的工作原理:参阅图1,图中给出了基于双向动态载荷模拟加载的数控车床刀架与主轴在位可靠性试验系统安装时的示意图,在试验开始前根据模拟工况中动、静态切削载荷的大小与频率选定柔性体;其次,需要将承载部分4与载荷加载部分3完成装配,之后将球铰链及其底座通过螺纹与螺纹加载头301进行连接。然后通过床身导轨并利用承载部分4底部的液压装置将承载部分4与载荷加载部分3通过摩擦力固定于床身上,接着调整六自由度平台与旋转板401到需要测试的工位,使用卡盘202进行球铰链座203的夹紧,最后调节数控刀架502使模拟切削刀杆501的头部球形体与球槽加载头302相配合。
43.本发明所述的基于双向动态载荷模拟加载的数控车床刀架与主轴在位可靠性试验系统在对被测机床主轴201与数控刀架502进行可靠性试验时,使用数控车床的数控系统控制数控刀架502的模拟切削刀杆501对球槽加载头302施加初始力,初始力与动态力的均值有关,均值越大初始力越大,并通过1号力传感器303和2号力传感器304可以直接读出此时初始力的大小,然后对支撑底座311中间凸台间隙的导线通一定频率的交流电来驱动直线电机定子319进行往复微小运动,此时的柔性体由于其材料与动力学特征将会对两端的加载头输出动态力并分别作用与机床主轴201与数控刀架502上。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。