技术特征:
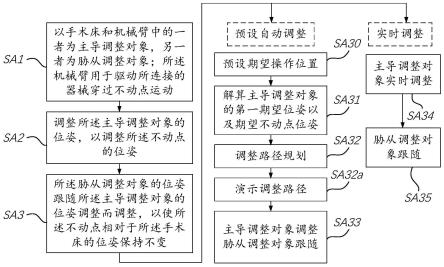
1.一种术中不动点的调整方法,其特征在于,包括:以支撑装置和机械臂中的一者为主导调整对象,另一者为胁从调整对象;所述机械臂用于驱动所连接的器械穿过不动点运动;调整所述主导调整对象的位姿,以调整所述不动点的位姿;所述胁从调整对象的位姿跟随所述主导调整对象的位姿调整而调整,以使所述不动点相对于所述支撑装置的位姿保持不变。2.根据权利要求1所述的术中不动点的调整方法,其特征在于,所述主导调整对象的位姿根据预设的期望操作位姿调整。3.根据权利要求2所述的术中不动点的调整方法,其特征在于,所述胁从调整对象的位姿跟随所述主导调整对象的位姿调整而调整的步骤包括:根据预设的所述期望操作位姿,得到所述主导调整对象的第一期望位姿,进而得到期望不动点位姿;基于当前所述主导调整对象的第一当前位姿,结合所述第一期望位姿规划所述主导调整对象的第一调整路径;根据所述第一调整路径及当前不动点位姿,得到所述胁从调整对象的第二调整路径,并按所述第二调整路径调整所述胁从调整对象的位姿。4.根据权利要求3所述的术中不动点的调整方法,其特征在于,在得到所述胁从调整对象的第二调整路径后,所述术中不动点的调整方法还包括:通过显示装置演示所述第一调整路径和/或所述第二调整路径。5.根据权利要求1所述的术中不动点的调整方法,其特征在于,所述主导调整对象的位姿实时主动地调整。6.根据权利要求5所述的术中不动点的调整方法,其特征在于,所述主导调整对象的位姿实时主动地调整的步骤包括:所述主导调整对象的位姿根据收到的调整指令调整;或者,所述主导调整对象的位姿依据受到的外力进行调整。7.根据权利要求5所述的术中不动点的调整方法,其特征在于,所述胁从调整对象的位姿跟随所述主导调整对象的位姿调整而调整的步骤包括:获取基于所述主导调整对象的位姿调整而实时变化的所述不动点的位姿变化信息;基于所述不动点的位姿变化信息,调整所述胁从调整对象的位姿。8.根据权利要求1所述的术中不动点的调整方法,其特征在于,以所述机械臂为主导调整对象,所述支撑装置为胁从调整对象时,若所述机械臂的数量大于两条,则将其中两条机械臂定义为所述主导调整对象中的主动调整端,而将其余的所述机械臂定义为所述主导调整对象中的被动调整端;所述主动调整端的位姿实时主动地调整,所述被动调整端的位姿跟随所述主动调整端的位姿调整而调整。9.根据权利要求1所述的术中不动点的调整方法,其特征在于,所述术中不动点的调整方法还包括:建立环境坐标系,并将支撑装置坐标系以及所述机械臂所在的手术机器人坐标系转换统一至所述环境坐标系。10.根据权利要求1所述的术中不动点的调整方法,其特征在于,所述术中不动点的调
整方法还包括:获取置于所述支撑装置上的预定对象的体表信息;基于所述体表信息建立安全区域,并将所述安全区域的位置信息与所述支撑装置的位置信息相关联;使所述机械臂的位姿调整避开所述安全区域。11.根据权利要求10所述的术中不动点的调整方法,其特征在于,所述安全区域的建立方法包括:利用定位装置获取靶标于预定对象的体表抵靠而得到的点云数据;基于所述点云数据拟合得到所述安全区域。12.根据权利要求10所述的术中不动点的调整方法,其特征在于,所述安全区域的建立方法包括:利用光纤形状传感器获取于预定对象的体表铺盖而得到的形状数据;基于所述形状数据拟合得到所述安全区域。13.根据权利要求1所述的术中不动点的调整方法,其特征在于,在所述胁从调整对象的位姿跟随所述主导调整对象的位姿调整而调整的步骤之后,所述术中不动点的调整方法还包括:根据所述机械臂调整后的位姿,调整所述机械臂至预期位姿;匹配调整后的所述机械臂的位姿与医生控制端的控制臂的操作位姿。14.一种可读存储介质,其上存储有程序,其特征在于,所述程序被执行时实现根据权利要求1~13中任一项所述的不动点的调整方法。15.一种手术机器人系统,其特征在于,包括:支撑装置、机械臂和主控制器,所述支撑装置和所述机械臂中的一者被配置为主导调整对象,另一者被配置为胁从调整对象,所述机械臂用于驱动所连接的器械穿过不动点运动;所述主控制器被配置为,根据权利要求1~13中任一项所述的不动点的调整方法,控制所述胁从调整对象的位姿跟随所述主导调整对象的位姿调整而调整,以使所述不动点相对于所述支撑装置的位姿保持不变。
技术总结
本发明提供一种术中不动点的调整方法、可读存储介质及手术机器人系统,所述术中不动点的调整方法包括:以支撑装置和机械臂中的一者为主导调整对象,另一者为胁从调整对象;所述机械臂用于驱动所连接的器械穿过不动点运动;调整所述主导调整对象的位姿,以调整所述不动点的位姿;所述胁从调整对象的位姿跟随所述主导调整对象的位姿调整而调整,以使所述不动点相对于所述支撑装置的位姿保持不变。如此配置,通过主导调整对象的位姿调整,胁从调整对象的位姿跟随主导调整对象的位姿调整而调整,可保持不动点相对于支撑装置的位姿保持不变。在不中断手术的情况下,能够有效满足各种术中体位调整,提高手术机器人手术的效率和安全性。性。性。
技术研发人员:蒋友坤 何超 袁帅
受保护的技术使用者:上海微创医疗机器人(集团)股份有限公司
技术研发日:2021.06.02
技术公布日:2022/12/5
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。