1.本发明属于机器人技术领域,具体涉及仪表管线越障机器人。
背景技术:
2.目前仪表管线主要应用于石油化工、消防、冶金、核电等要求承受压力高、尺寸精密等部门及领域,其设计在这些领域都是大规模,大批量,甚至于大距离的。仪表管线布置环境相对比较复杂,不仅有水平走向和垂直走向,同时还有卡箍、遮挡、槽洞等;为了解决上述问题,因此需要研发出一种仪表管线越障机器人在此类复杂环境下的越障技术。
3.目前市场上对于管径很小的管线也有一些爬行机器人,但是其只能在水平走向的管线上爬行,且对于一些卡箍、遮挡、槽洞等路障并不能越过去。现如今还没有一种技术能够完美的对任意走向的仪表管线上的故障进行越障。因此在现有技术当中迫切需要一种解决上述问题的技术方案。
4.因此,设计一种能够在任意走向的仪表管线上进行爬行的仪表管线越障机器人,就显得十分必要。
5.例如,申请号为cn202022473139.1的中国专利文献描述的一种管道内壁自动探伤修补智能机器人,包括机器人本体,所述机器人本体的前端固定安装有支撑杆,所述支撑杆的前端安装有旋转电机,所述旋转电机的输出端固定安装有旋转杆,所述旋转杆的一侧固设有探伤组件,所述旋转杆的另一侧固设有修补组件,所述探伤组件位于所述修补组件的前侧,所述机器人本体内设有用于控制所述旋转电机、探伤组件和修补组件的控制器;所述机器人本体的下方安装有用于支撑所述机器人本体的第一伸缩杆,所述第一伸缩杆的底部安装有移动轮。虽然能够针对天然气、石油和自来水管道的内壁进行探伤、检测和修复,避免因为管道内壁出现裂痕、生锈、形变等问题造成人员健康财产的损失,但不足之处在于,在水平走向的管线上爬行时,对于一些卡箍、遮挡、槽洞等路障并不能越过去。
技术实现要素:
6.本发明是为了克服现有技术中,对于仪表管线越障方面技术缺乏的问题,提供了一种能够在任意走向的仪表管线上进行爬行的仪表管线越障机器人。
7.为了达到上述发明目的,本发明采用以下技术方案:
8.仪表管线越障机器人,包括:
9.机器人稳定装置,所述机器人稳定装置包括箱体、设于箱体上的圆形滑轨、设于箱体底部外凸的圆环和设于箱体两侧的圆形配重块;
10.机械手臂,所述机械手臂包括手臂夹环、限位器、手臂夹环把柄、活动板、动力杆连接头、动力杆、滚筒、滚筒连接头、丝杆步进电机、丝杆、旋转电机和旋转电机转轴;所述限位器分别安装在手臂夹环与手臂夹环把柄连接处的前后两侧;所述手臂夹环把柄斜角处与活动板一侧通过旋转铰链连接;所述手臂夹环把柄的末端与动力杆连接头连接;所述活动板另一侧与滚筒连接头相连接,所述丝杆一端内嵌入到动力杆内,所述丝杆另一端与丝杆步
进电机固定连接,所述旋转电机转轴与滚筒固定连接;所述机器人稳定装置与滚筒连接;
11.爬行装置,所述爬行装置包括弹簧装置、滚动轴承、转向架、主动滑轮、滑轮电机、从动滑轮、螺钉和编码器;所述弹簧装置一侧与手臂夹环内侧固定连接,另一侧与滚动轴承外圈固定连接;所述转向架底部与滚动轴承内圈通过螺钉固定连接;所述主动滑轮与转向架头部通过滑轮电机的转轴连接;所述编码器固定连接在滑轮电机的转轴上;所述从动滑轮与转向架头部通过圆柱销连接。
12.作为优选,所述圆形配重块对称分布在箱体两侧。
13.作为优选,所述滚筒上设有向内凹的圆槽。
14.作为优选,所述圆环与滚筒上设有向内凹的圆槽过盈配合。
15.作为优选,所述手臂夹环基于所述箱体的中轴线对称;所述手臂夹环收紧时呈圆形状。
16.作为优选,所述手臂夹环的直径为仪表管线直径与爬行装置直径的总和。
17.作为优选,所述活动板基于所述箱体的中轴线对称。
18.作为优选,所述机器人稳定装置中的箱体通过圆形滑轨与滚筒连接。
19.作为优选,所述手臂夹环内侧设有同轴心的一对圆形孔。
20.作为优选,所述弹簧装置一侧放置在所述圆形孔内。
21.本发明与现有技术相比,有益效果是:(1)本发明中的方型箱体体积较小,与机械手臂组合占用的空间体积小;(2)本发明中机械手臂设置的结构简单,减少了机器人系统的复杂性,增加了机构的紧凑性;(3)本发明能够顺利的长距离且布置复杂的仪表管线上工作;(4)本发明中的机械手臂滚筒内部采用了一个丝杆步进电机来控制机械手臂夹环的张开与收缩,而机械手臂滚筒上采用了一个旋转电机来控制机械手臂夹环的旋转,从而能够使仪表管线机器人可以在任意角度走向的仪表管线上爬行。
附图说明
22.图1为本发明中机器人稳定装置的一种结构示意图;
23.图2为本发明仪表管线越障机器人的一种总体结构示意图;
24.图3为本发明中机械手臂的一种结构示意图;
25.图4为本发明中爬行装置的一种结构示意图;
26.图5为本发明仪表管线越障机器人的一种正视图;
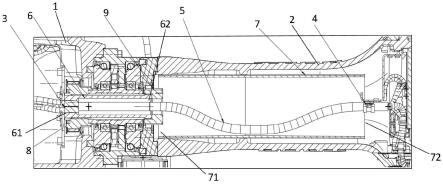
27.图6为图5中a-a处的一种剖面图;
28.图7为本发明仪表管线越障机器人的一种左视图;
29.图8为图7中b-b处的一种剖面图;
30.图9为本发明仪表管线越障机器人的一种俯视图;
31.图10为图9中c-c处的一种剖面图。
32.图中:机器人稳定装置1、箱体101、圆形滑轨102、圆环103、圆形配重块104、机械手臂2、手臂夹环201、限位器202、手臂夹环把柄203、活动板204、动力杆连接头205、动力杆206、滚筒207、滚筒连接头208、圆槽209、丝杆步进电机210、丝杆211、旋转电机212、旋转电机转轴213、爬行装置3、弹簧装置301、滚动轴承302、转向架303、主动滑轮304、滑轮电机305、从动滑轮306、螺钉307、编码器308。
具体实施方式
33.为了更清楚地说明本发明实施例,下面将对照附图说明本发明的具体实施方式。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,并获得其他的实施方式。
34.实施例1:
35.如图1至图10所示的仪表管线越障机器人,包括:
36.机器人稳定装置1,所述机器人稳定装置包括箱体101、设于箱体上的圆形滑轨102、设于箱体底部外凸的圆环103和设于箱体两侧的圆形配重块104;箱体两侧装有圆形配重块,能够平衡仪表管线越障机器人,使仪表管线越障机器人在爬行的过程不会跌倒,所述机器人稳定装置通过圆形滑轨102连接机械手臂中的滚筒207部分。
37.机械手臂2,所述机械手臂包括手臂夹环201、限位器202、手臂夹环把柄203、活动板204、动力杆连接头205、动力杆206、滚筒、滚筒连接头208、丝杆步进电机210、丝杆211、旋转电机212和旋转电机转轴213;所述限位器分别安装在手臂夹环与手臂夹环把柄连接处的前后两侧;所述手臂夹环把柄斜角处与活动板一侧通过旋转铰链连接,形成旋转副;所述手臂夹环把柄的末端与动力杆连接头连接,形成移动副;所述活动板另一侧与滚筒连接头相连接,形成旋转副;所述丝杆一端内嵌入到动力杆内并形成螺旋副,所述丝杆另一端与丝杆步进电机固定连接,所述旋转电机转轴与滚筒固定连接;所述机器人稳定装置与滚筒连接;
38.爬行装置3,所述爬行装置包括弹簧装置301、滚动轴承302、转向架303、主动滑轮304、滑轮电机305、从动滑轮306、螺钉307和编码器308;所述弹簧装置一侧与手臂夹环内侧固定连接,另一侧与滚动轴承外圈固定连接;所述转向架底部与滚动轴承内圈通过螺钉固定连接;所述主动滑轮与转向架头部通过滑轮电机的转轴连接并形成旋转副;所述编码器固定连接在滑轮电机的转轴上;所述从动滑轮与转向架头部通过圆柱销连接并形成旋转副。
39.如图3所示,箱体内嵌的圆形滑轨与滚筒同轴心且过盈配合,旋转电机正反转带动滚筒在圆形滑轨上旋转,而箱体上两侧面上对称分布圆形承重块能够维持机器人在爬行过程中的平衡。
40.如图2所示,机器人手臂夹环基于箱体中轴线对称,且收紧时为一个完整的圆周,另机器人手臂夹环的直径是仪表管线的直径与爬行装置直径的总和,手臂夹环夹紧仪表管线时,滑轮正好卡住仪表管线,工作人员需根据仪表管线的直径来设置机器人手臂夹环的直径。
41.如图1所示,活动板是基于箱体中轴线对称,箱体内设有往外凸的圆环,圆环与滚筒上往内凹的圆槽209过盈配合。通过调节丝杆步进电机正反转来控制丝杆的移动距离和活动板的旋转量,以此来实现对于手臂夹环把柄的控制,从而控制手臂夹环的张开和收缩,进而控制手臂夹环内测的爬行装置,最终促使机器人在仪表管线上水平向爬行;通过调节旋转电机正反转来控制固连在旋转电机转轴上的滚筒的旋转量,从而控制手臂夹环顺时针或逆时针旋转;通过依次启动丝杆步进电机和旋转电机,机器人在任意走向的仪表管线上爬行。
42.进一步的,限位器分别安装在手臂夹环与手臂夹环把柄连接处的前后两侧。
43.进一步的,所述机器人稳定装置中的箱体通过圆形滑轨与滚筒连接。
44.进一步的,所述手臂夹环内侧设有同轴心的一对圆形孔。
45.进一步的,所述弹簧装置一侧放置在所述圆形孔内。
46.如图4所示,爬行装置中弹簧装置放置在手臂夹环内侧的圆形孔内,在机器人爬行的过程中,爬行装置通过自适应的旋转从而适应管线变径、变向或机器人重心发生偏移时,总体位姿的调整,从而避免机械手臂夹紧时滑轮偏离了仪表管线水平轴线上的路径,也维持了机器人在爬行过程中的平衡性。
47.主动滑轮上还装有滑轮电机,主动滑轮由滑轮电机驱动,从而带动从动滑轮行走,最终实现管线爬行机器人的前进和后退。
48.本发明的使用方法工作原理如下:
49.送至管线位置:按下丝杆步进电机正转按钮,动力杆会向前伸出,从而带动活动板旋转,进而控制手臂夹环张开,然后按下丝杆步进电机反转按钮控制手臂夹环缩回,从而夹紧仪表管线,要注意使得机器人与管线上方平行,且手臂夹环内侧的爬行装置正好对准管线的中心轴线。
50.水平方向的管线:在机器人夹住仪表管线后,启动主动滑轮电机,主动滑轮会带动从动滑轮和从动滑轮一起向前转动,从而使得机器人向前爬行;当仪表管线变向时,也就是在水平方向上与变向前的管线成任意角度时,先按下丝杆步进电机正转按钮,控制手臂夹环张开一点距离后按下暂停按钮,然后启动旋转电机,旋转电机转轴上的滚筒旋转,从而会带动手臂夹环左右方向摆动,待手臂夹环与变向后的管线水平方向上的轴线相同时,最后按下丝杆步进电机反转按钮让手臂夹环夹住变向后的仪表管线,最终使机器人继续往前爬行。
51.竖直方向的管线:在机器人爬行到变向处时,先按下丝杆步进电机正转按钮,控制手臂夹环张开一点距离后按下暂停按钮,若此时限位器会触碰到竖直处的管线,此时机器人会向后倾倒,滑轮继续向前爬行,从而使得手臂夹环进入竖直的仪表管线,后启动旋转电机,控制手臂夹环与竖直的管线在水平方向同轴心后,再按下丝杆步进电机反转按钮,控制手臂夹环夹紧管线,从而使得机器人继续向前行走;若此时限位器不会触碰到竖直处的管线,启动旋转电机,手臂夹环会左右方向摆动,待手臂夹环进入变向后的管线并调整到其与变向后管线轴线一致时,再按下丝杆步进电机反转按钮,控制手臂夹环夹紧管线,最后机器人继续向前行走。
52.本发明中的方型箱体体积较小,与机械手臂组合占用的空间体积小;本发明中机械手臂设置的结构简单,减少了机器人系统的复杂性,增加了机构的紧凑性;本发明能够顺利的长距离且布置复杂的仪表管线上工作;本发明中的机械手臂滚筒内部采用了一个丝杆步进电机来控制机械手臂夹环的张开与收缩,而机械手臂滚筒上采用了一个旋转电机来控制机械手臂夹环的旋转,从而能够使仪表管线机器人可以在任意角度走向的仪表管线上爬行。
53.以上所述仅是对本发明的优选实施例及原理进行了详细说明,对本领域的普通技术人员而言,依据本发明提供的思想,在具体实施方式上会有改变之处,而这些改变也应视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。