1.本技术实施例涉及穿戴设备技术领域,并且更为具体地,涉及一种智能眼镜。
背景技术:
2.智能眼镜已经成为人们日常生活的常用物品,用户也越来越重视智能眼镜的多功能和多样化。但目前的智能眼镜难以适应不用的应用场景,特别是辅助用户进行不同作业的应用场景。因此有必要提供一种适用于多种应用场景的智能眼镜。
技术实现要素:
3.本技术实施例提供一种智能眼镜。下面对本技术实施例涉及的各个方面进行介绍。
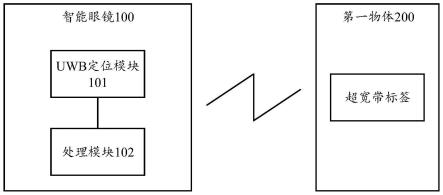
4.第一方面,提供一种智能眼镜,包括:超宽带定位模块,用于与配置有超宽带标签的第一物体通信,以获取所述智能眼镜与所述第一物体之间的第一相对位置信息;处理模块,与所述超宽带模块连接,用于执行以下操作:获取用户的当前作业场景;根据所述智能眼镜与所述第一物体之间的第一相对位置信息,确定第一指示信息;其中,所述第一指示信息用于辅助所述用户进行所述当前作业。
5.一种可能的实现方式,所述智能眼镜还包括:一个或多个拍摄模块,用于根据所述第一相对位置信息对所述第一物体进行拍摄。
6.一种可能的实现方式,所述多个拍摄模块包括第一拍摄模块和第二拍摄模块,所述处理模块还用于:基于所述第一拍摄模块和所述第二拍摄模块与所述第一物体之间的拍摄视角差,计算所述智能眼镜与所述第一物体之间的第二相对位置信息。
7.一种可能的实现方式,所述智能眼镜还包括:触摸模块,所述触摸模块用于打开或关闭一个或多个所述拍摄模块。
8.一种可能的实现方式,所述智能眼镜还包括:第一无线通信模块,用于与云服务器进行通信,以在所述云服务器中存储一个或多个所述拍摄模块拍摄的图像数据。
9.一种可能的实现方式,所述智能眼镜还包括:第二无线通信模块,用于接收所述智能眼镜外部的音频设备传输的音频数据;骨传导耳机模块,用于播放所述音频数据。
10.一种可能的实现方式,所述智能眼镜还包括:投影模块,用于投射光线,并在所述智能眼镜前方形成虚拟操作界面。
11.一种可能的实现方式,所述智能眼镜还包括:增强现实模块,用于增强所述虚拟操作界面。
12.一种可能的实现方式,所述用户的当前作业包括伏案作业或导航寻物。
13.一种可能的实现方式,所述智能眼镜还包括:运动传感器模块,用于采集所述用户头部的移动幅度,以对所述智能眼镜进行智能操作。
14.本技术实施例中智能眼镜,采用超宽带技术对第一物体进行定位,然后根据智能眼镜与第一物体之间的相对位置信息,辅助用户进行当前作业,例如可以辅助用户进行导
航寻物、正确的伏案作业等。也就是说,本方案中的智能眼镜可以适用于多种应用场景,更好地满足用户的需求。
附图说明
15.图1是本技术一实施例提供的智能眼镜的结构示意图。
16.图2是图1中示出的智能眼镜的另一种可能的结构示意图。
17.图3是本技术一实施例提供的相位差测到达角的原理的结构示意图。
18.图4是本技术一实施例提供的三角形模型测到达角的原理的结构示意图。
19.图5是本技术一实施例提供的基于单往返消息的测距的结构示意图。
20.图6是本技术一实施例提供的基于多往返消息的测距的结构示意图。
21.图7是本技术一实施例提供的超宽带定位模块的指向控制的结构示意图。
22.图8是本技术一实施例提供的智能眼镜辅助用户学习的方法的流程示意图。
23.图9是本技术一实施例提供的智能眼镜辅助用户导航寻物的方法的流程示意图。
24.图10是本技术一实施例提供的智能眼镜辅助用户管理时间的方法的流程示意图。
25.图11是本技术一实施例提供的智能眼镜辅助用户视屏拍照的方法的流程示意图。
具体实施方式
26.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本技术一部分实施例,而不是全部的实施例。
27.智能眼镜已经成为人们日常生活的常用物品,用户也越来越重视智能眼镜的多功能和多样化。但目前的智能眼镜难以适应不用的应用场景,特别是辅助用户进行不同作业的应用场景。例如,在小孩写作业的场景中,会出现坐姿不端正,眼睛与课本之间距离过近的情况。又如,用户在寻找东西的导航寻物场景中,存在费时费力,难以寻找的问题。根据上述内容分析可以看出,现有的智能眼镜并不能在用户的多种作业场景中发挥作用。本技术实施例正是建立在上述发现和分析基础上完成的,上述发现和分析并非现有技术,而应当视为本技术对现有技术的贡献的一部分。
28.基于此,本技术实施例中提出一种智能眼镜,采用超宽带(ultra wide band,uwb)技术对第一物体进行定位,然后根据智能眼镜与第一物体之间的相对位置信息,辅助用户进行当前作业,例如可以辅助用户进行导航寻物、正确的伏案作业等。也就是说,本方案中的智能眼镜可以适用于多种应用场景,更好地满足用户的需求。
29.需要说明的是,超宽带通信技术是一种使用1ghz以上频率带宽的无线载波通信技术。它不采用正弦载波,而是利用纳秒至微秒级的非正弦波窄脉冲传输数据,因此,其所占的频谱范围很宽,适用于高速、近距离的无线个人通信。采用uwb技术,很容易将定位与通信合一,而常规无线电难以做到这一点。uwb技术具有极强的穿透能力,可在室内和地下进行精确定位,其定位精度可达厘米级。需要说明的是,美国联邦通信委员会(federal communications commission,fcc)规定,uwb的工作频段范围为3.1ghz至10.6ghz,最小工作频宽为500mhz。目前,主流的uwb频段中心频率为6.5ghz和8ghz,带宽要求一般是500mhz以上。
30.需要说明的是,第一物体可以是指任意物体,比如可以是课本、课桌等物体,也可
以是电视、冰箱、手机、音箱、门锁等电子产品,本技术实施例对此不做具体限制。
31.需要说明的是,本技术实施例中的智能眼镜可以包括镜框、镜腿以及设置在镜框中的光学组件。该光学组件可以是具有视力矫正功能的近视镜片或者远视镜片,或者平光镜片等,本技术对此不做具体限制。
32.图1为本技术实施例提供的一种智能眼镜的结构示意图。如图1所示,智能眼镜100可以包括超宽带定位模块101和处理模块102。
33.超宽带定位模块101也可以称为uwb定位模块,可用于与配置有超宽带标签的第一物体200通信,以获取智能眼镜100与第一物体200之间的第一相对位置信息。超宽带定位模块101与超宽带标签之间可以进行超宽带通信技术。可以理解的是,本技术实施例中的第一物体200上可以配置超宽带标签。超宽带定位模块101与超宽带标签中均可以包括天线(也可以称为uwb天线),以支持超宽带信号通信。在一些实施例中,超宽带定位模块101可以包括两个uwb天线,分别为第一uwb天线和第二uwb天线。超宽带标签可以包括一个第三uwb天线。
34.第一相对位置信息可以是指利用超宽带技术计算的智能眼镜100与第一物体200之间的第一相对位置信息,该第一相对位置信息包括智能眼镜100与第一物体200之间的距离、角度信息,或者第一物体200相对于智能眼镜的相对坐标信息等。在一些实施例中,可以利用智能眼镜100中的第一uwb天线和第二uwb天线与第一物体200中的第三uwb天线之间传输uwb信号,来进行测角、测距等计算。例如可以利用第三uwb天线与第一uwb天线和第二uwb天线之间的相位差来测量达到角,也可以利用第一uwb天线、第二uwb天线和第三uwb天线的位置三角模型计算角度数据。又例如可以利用第三uwb天线与第一uwb天线和第二uwb天线之间的消息传输时间进行测距。(后文会结合图3至图6对采用超宽带技术的测角、测距进行举例说明,具体可以参见图3至图6的相关描述,在此不做详细描述)。
35.处理模块102可与uwb定位模块101连接,用于获取第一相对位置信息。处理模块102还可以用于获取用户的当前作业场景。在一些实施例中,当前作业场景可以是伏案作业场景,比如,可以小孩伏案学习场景,也可以是成人伏案工作的场景。当前作业场景也可以是导航寻物场景,比如在家中寻找手机的场景。当前作业场景也可以是看电视、玩手机的场景,还可以是听音乐、拍照片的场景等。本技术实施例对此不做具体限制。
36.处理模块102可用于根据智能眼镜100与第一物体200之间的第一相对位置信息来确定第一指示信息,该第一指示信息可用于辅助用户进行当前作业。
37.例如,以小孩伏案学习场景为例,此时的第一物体200可以是课本。智能眼镜100若识别为小孩伏案学习场景,则可以利用uwb定位模块101和uwb标签之间的通信,来识别智能眼镜100与第一物体200之间的角度和距离(即用户与第一物体200之间的角度和距离)。如果智能眼镜100与第一物体200之间的当前角度和/或距离超出了预设阈值的范围,则处理模块102可以发出第一指示信息,以纠正小孩的不良习惯和坐姿。在一些实施例中,第一指示信息可以是显示指示信息,比如可以是显示在光学组件上的文字提醒信息或正确的坐姿图像信息。第一指示信息也可以是震动指示信息,比如根据智能眼镜100与第一物体200之间的距离满足预设阈值时,则发出震动提醒。其距离越近,智能眼镜100的震动频率越高。当然,第一指示信息还可以是其他类型的指示信息。
38.又如,以导航寻物场景为例,此时假若第一物体200是手机,第一物体200中的uwb
标签包括了标签id信息。uwb定位模块101可以识别第一物体200中的uwb标签id信息,然后可以获取第一物体200相对于智能眼镜100的坐标位置。处理模块102可以根据该坐标位置信息发出第一指示信息,以辅助用户快速找到该第一物体200。第一指示信息可以是显示在光学组件上的箭头前进方向。当然,第一指示信息也可以是震动指示信息,比如根据震动频率来判断相对位置的距离,或其他类型的指示信息。
39.通过上述内容可以看出,本技术实施例中的智能眼镜100可以采用超宽带技术对第一物体200进行定位,然后根据智能眼镜100与第一物体200之间的相对位置信息,辅助用户进行当前作业,从而可以更好地满足用户的需求,提高用户体验。
40.在一些实施例中,处理模块102可以是通用处理器或者专用处理器。例如,该处理器可以为中央处理单元(central processing unit,cpu)、应用芯片(application processor,ap)。或者,该处理模块102还可以是其他通用处理器、数字信号处理器(digital signal processor,dsp)、专用集成电路(application specific integrated circuit,asic)、现成可编程门阵列(field programmable gate array,fpga)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件等。通用处理器可以是微处理器或者该处理器也可以是任何常规的处理器等。
41.在一些实施例中,参见图2,智能眼镜100还可以包括一个或多个拍摄模块103,该一个或多个拍摄模块103可用于将用户所见的景物或人物拍摄下来。由于头部结构的稳定性,利用穿戴在用户头部的智能眼镜100进行拍摄任务,可以缓解手拍摄的抖动较大的问题。拍摄模块103可以包括高清摄像头,或其他类型的图像传感器。
42.在一些实施例中,可以将第一相对位置信息应用于拍摄系统,例如可以先获取智能眼镜100与第一物体200之间的第一相对位置信息,然后利用第一相对位置信息来辅助一个或多个拍摄模块103对第一物体200或第一物体200周围的景物进行拍摄。这样一来,一个或多个拍摄模块103可以实现更加准确的对焦,从而可以提高拍摄精度。
43.在一些实施例中,多个拍摄模块103可以包括第一拍摄模块和第二拍摄模块,基于第一拍摄模块和第二拍摄模块与第一物体200之间的拍摄视角差,处理模块102可以计算智能眼镜100与第一物体200之间的第二相对位置信息。第二相对位置信息可以包括智能眼镜100与第一物体200之间的距离、角度等位置信息。应理解,在一些实施例中,可以结合第一相对位置信息和第二相对位置信息,综合计算得出智能眼镜100与第一物体200之间的位置信息,从而有助于缓解单独一种测量方式所带来的测量误差较大的问题。
44.在一些实施例中,继续参见图2,智能眼镜100还可以包括第一无线通信模104和/或第二无线通信模块105,第一无线通信模块104可用于与外部的云服务器进行通信,例如可以将通过拍摄模块103获取的图像和视频数据存储在云存储空间,其他电子设备可以访问云存储空间,并下载该图像和视频数据。通过第一无线通信模块104也可以实现与其他电子设备之间的通信,第一无线通信模块104例如可以是2g、4g、5g等通信模块。第二无线通信模块105可用于短距离通信,例如可用于接收智能眼镜100外部的较近距离的电子设备传输的音频数据或图像数据等。第二无线通信模块105例如可以是蓝牙(bluetooth)、无线网wi-fi等通信模块。
45.在一些实施例中,继续参见图2,智能眼镜100还包括骨传导耳机模106,通过骨传导耳机模块106可以播放从外部电子设备中获取的音频数据。骨传导是一种声音传导方式,
即将声音转化为不同频率的机械振动,通过人的颅骨、骨迷路、内耳淋巴液、螺旋器、听觉中枢来传递声波。相对于通过振膜产生声波的经典声音传导方式,骨传导省去了许多声波传递的步骤,能在嘈杂的环境中实现清晰的声音还原,而且声波也不会因为在空气中扩散而影响到他人。可以在眼镜框架上装备骨传导模块,以实现更有品质的声音传输。
46.在一些实施例中,继续参见图2,智能眼镜100可以包括投影模块107和增强现实模块108,该投影模块107可用于投射光线,并在智能眼镜100前方形成虚拟操作界面。投影模块107例如也可用于将拍摄模块103拍摄的图片或视频进行投影,以形成虚拟显示界面。增强现实模块108,可用于增强上文提及的虚拟操作界面和虚拟显示界面。
47.在一些实施例中,智能眼镜100可以具有投屏功能,例如可以将上文提及的图片或视频数据投屏到其他电子设备上,比如可以投屏在电视上。
48.在一些实施例中,智能眼镜100也可以作为数据传输的中间媒介,实现第一设备与第二设备之间的数据传输,例如可以将智能眼镜100对准第一设备,并与第一设备连接,然后再将智能眼镜100对准第二设备,并与第二设备连接,从而可以实现第一设备与第二设备之间的数据传输。
49.在一些实施例中,智能眼镜100中还可以设有至少一个声学模块109,可以通过该声学模块109播放音频。该声学模块109可以包括扬声器或者耳机。智能眼镜100中也可以设有至少一个麦克风,以采集智能眼镜100周围的声音信息。智能眼镜100可以具有语音识别功能,用户可以通过语音方式对智能眼镜100进行智能操控。
50.在一些实施例中,继续参见图2,智能眼镜100还可以包括触摸模块110,触摸模块110可用于指纹解锁或触摸操控。本技术实施例可以定义不同的触摸方式启动不同的操作,以实现触摸操控。例如可以定义单击触摸模块的次数,来进入学习模式、导航模式、音乐模式、拍摄模式等。例如,在音乐模式下,可以通过滑动、点击(包括点击的时间、力度、次数等)来切换歌曲、调节音量、关闭音乐等。作为一个示例,在拍摄模式下,可以通过对触摸模块的不同触摸操作来拍摄远景、近景等,实现看的更远,看的更清晰的视觉体验。也可以通过对触摸模块的触摸操作,实现关闭或打开拍摄模块103。需要说明的是,触摸操作可以精准的实现对智能眼镜100中的多种功能的操控。为了便捷性,也可以通过智能控制模式,来实现对智能眼镜100的操控。作为一个示例,可以通过手势识别,来实现对拍摄模式、音乐播放等多种功能的切换。作为另一个示例,以音乐模式为例,可以通过用户头部的移动幅度和移动速度,来实现调节音量、切换歌曲、关闭音乐等操作。
51.在一些实施例中,可以在智能眼镜100中设置运动传感器模块111,该运动传感器模块111可以包括加速度传感器或陀螺仪传感器等。运动传感器模块111可用于采集用户头部的移动幅度和移动速度等运动信息,以对智能眼镜100中多种功能进行操控。
52.在一些实施例中,智能眼镜100还可以包括定位模块112,例如gps定位模块、惯性导航定位模块等,通过这些定位模块可以确定佩戴智能眼镜100的用户的当前位置。
53.需要说明的是,智能眼镜100中的各个模块之间可以相互配合连接,图2仅是一种可能的实现方式。
54.图3是本技术实施例提供一种相位差测测量到达角的原理图。下面以智能眼镜100的uwb定位模块101包括第一uwb天线和第二uwb天线,第一物体200的uwb标签包括一个第三uwb天线为例,结合图3,对利用相位差测到达角的原理进行详细描述。
55.如图3所示,以p1点表示第一uwb天线的位置,以p2点表示第二uwb天线的位置,以p3点表示第一物体200的uwb标签中的第三uwb天线的位置;p4点表示p1和p2连线的中点。在本实施方式中,θ1表示p1·
p2连线与p1·
p3连线之间的夹角;θ2表示p1·
p2连线与p2·
p3的连线之间的夹角;θ表示p1·
p2的连线与p3·
p4的连线之间的夹角;α表示θ的余角;d表示p3·
p4之间的距离;λ表示第一uwb天线及第二uwb天线收发的电磁波信号的波长;f表示第一uwb天线及第二uwb天线收发的电磁波信号的频率;d表示第一uwb天线及第二uwb天线的间距的最大值。
56.其中,d远大于λ,则有θ1≈θ2≈θ。
57.由于第一uwb天线及第二uwb天线皆为uwb天线:
58.因此,f的范围可以为6.5ghz-8ghz;
59.相应地,λ的范围可以为36.4mm-48mm,则有λ/2的范围为18.2mm-24mm。
60.假若设定d=18mm。
61.继续参见图3,p1·
p5为平行于p3·
p4的虚线,所以p1·
p5与p1·
p2之间的夹角也是θ;p2·
p6是与p1·
p5垂直的线,其中,p1·
p6的长度可用d1表示;在三角形p1·
p2·
p6中,电磁波信号达到第一uwb天线及第二uwb天线的距离差d1为:
62.d1=d cosθ=d sinα
ꢀꢀꢀ
(1)
63.根据公式(1),电磁波信号达到第一uwb天线及第二uwb天线的时间差可用t1表示,t1为:
[0064][0065]
其中,c表示光速,由于t1表示电磁波信号达到第一uwb天线及第二uwb天线的时间差,因此,也称为到达时间差(time difference ofarrival,tdoa)。
[0066]
根据公式(2),电磁波信号达到第一uwb天线及第二uwb天线的相位差为:
[0067][0068]
由于表示电磁波信号达到第一uwb天线及第二uwb天线的相位差,因此,也称为到达相位差(phase difference of arrival,pdoa)。根据公式(3),第一uwb天线相对于第三uwb天线的角度数据α为:
[0069][0070]
其中,α表示第一参考面上的达到角度(angle of arrival,aoa),第一参考面为垂直于p1·
p2连线,且通过p4点的平面。其中,公式(4)显示了到达角与相位差之间的映射关系。
[0071]
图4是本技术实施例提供的一种根据三角形模型测量到达角的原理图。下面以智能眼镜100的uwb定位模块101包括第一uwb天线和第二uwb天线,第一物体200的uwb标签包括一个第三uwb天线为例,结合图4,对根据三角形模型测量到达角的原理进行详细描述。
[0072]
如图4所示,图4中a点为第三uwb天线所在的位置,b点为第一uwb天线所在的位置,c点为第二uwb天线所在的位置。
[0073]
可选的,在三角形abc中,其中,ab之间的距离可以通过测距的方式测得,用r表示;ac之间的距离也可以通过测距的方式测得,为(r-p),其中,p为ab与ac之间的距离差。bc之
间的间距为预设间距d2。根据角度α的正弦公式可得:
[0074][0075]
定义ad之间的距离为y,在三角形abd中,sinα=y/r;结合公式(5)可以得到:
[0076][0077]
其中,当d2等于π/2时,p会在(-λ/2,λ/2)之间,可计算得到α和y的值。α表示第一参考面上的达到角度aoa。
[0078]
图5是本技术实施例提供一种基于单个往返消息时间上的测距原理图,下面结合图5对基于单个往返消息时间上的测距原理进行举例说明。
[0079]
如图5所示,第一物体200(图5中的a设备)主动发送数据到智能眼镜100(图5中的b设备),智能眼镜100在收到第一物体200发送的数据后,可以返回数据以响应第一物体200。具体的,a设备主动发送(tx)数据(对应图中tx时间节点到t
round
时间起点),同时记录发送时间戳,b设备接收到(rx)数据之后记录接收时间戳,rmarker表示数据完成传输(接收或发送)的时间节点;延时t
reply
之后,b设备发送数据,同时记录发送时间戳,a设备接收数据,同时记录接收时间戳。
[0080]
具体的,第一天线信号包括第一物体200发送的tx数据和发送tx数据的时间戳。第二天线信号包括智能眼镜100接收rx数据的时间戳、智能眼镜100发射tx数据的时间戳;第一物体200还可以获取接收rx数据的时间戳。以上可以得到两个时间差数据,第一物体200发送tx数据和接收rx数据的时间差t
round
和智能眼镜100发送tx数据和接收rx数据的时间差t
reply
,最终得到电磁波信号在第一物体200与智能眼镜100之间的飞行时间如下:
[0081][0082]
两个时间差时间都是基于本地的时钟计算得到的,本地时钟误差可以抵消,但是不同设备之间会存在微小的时钟偏移,假设第一物体200和智能眼镜100的时钟偏移(也称为晶振频偏)分别为ea和eb,因此,得到的飞行时间会随着t
reply
的增加而增加,测距误差error的方程如下:
[0083][0084]
其中,t
prop
为电磁波信号在第一物体200与智能眼镜100之间的实际飞行时间。根据t
prop
和电磁波信号在空气中的传输速度可以计算出第一物体200与智能眼镜100之间的距离,其中,电磁波信号的传输速度可取光速。即可计算出第一物体200与智能眼镜100之间的距离。
[0085]
本实施方式提供的测距只需单次信号往返即可测距,极大地缩短了测距时间,实现了极快测距响应。
[0086]
图6是本技术实施例提出的另一种可能的测距实现方式,通过第一物体200与智能眼镜100之间进行3次消息传送,获得两次往返时间延迟,该时间延迟为电磁波信号在第一物体200与智能眼镜100之间飞行两次的飞行时间,再结合电磁波信号在第一物体200与智能眼镜100之间的传输速度,在智能眼镜100测量出距离。如图6所示,当智能眼镜100收到数据之后,立刻返回数据,最终也可以得到如下四个时间差:
[0087]
第一物体200的第一次发送数据和接收数据的时间差t
round1
;
[0088]
智能眼镜100第一次接收数据后的延时t
reply1
(接收第一次数据后的延时);
[0089]
智能眼镜100第一次发送数据和接收数据的时间差t
round2
;
[0090]
第一物体200第一次接收数据后的延时t
reply2
(接收第二次数据后的延时);
[0091]
使用如下公式计算电磁波信号的飞行时间
[0092][0093]
时间误差分析:以上测距的机制都是非对称的测距方法,因为它们对于响应时间不要求是相同的。即便使用20ppm的晶体,时钟误差也是在毫秒级别的。误差公式如下:
[0094][0095]
其中ka和kb为晶振的实际频率与标称频率之比,因此,ka和kb非常接近于1。
[0096]
本实施方式相较于第一种测距的实施方式虽然增加了响应的时间,但通过增加了一个消息往返之后会降低测距误差,提高测距的精准性。
[0097]
本实施方式的测距方式是3次消息的传输方式,在其他实施方式中,还可以进行4次消息等的传输方式,通过增加消息传输次数,可进一步地提高测距的准确性,进而进一步地提高充电效率。
[0098]
在一些实施例中,智能眼镜100可以通过超宽带定位模块进行指向控制。如图7所示,例如智能眼镜100可以控制冰箱、电视、门锁、音箱等家居设备。应理解,家居设备上需要配置uwb标签,每个uwb标签可以具有自己的id,例如冰箱可以配置uwb标签1,电视可以配置uwb标签2,门锁可以配置uwb标签3,音箱可以配置uwb标签4。通过各个家居设备上的uwb标签可与智能眼镜100上的uwb模块形成交互,使得智能眼镜100具有空间感知能力。需要说明的是,初始时需要将居家设备上的uwb标签id与居家设备上的蓝牙模块或wi-fi模块(例如冰箱和电视的wifi id,又如,门锁和音箱的蓝牙id)进行绑定。当智能眼镜100的uwb模块打开接收机时,会依次接收到空间中各uwb标签发来的信号。智能眼镜100可以筛选出在正前方的信号uwb标签id,追踪到其对应的居家设备,然后可以通过wifi或蓝牙与其互动。
[0099]
本技术实施例还给出了一种可能的指向控制基本交互逻辑:
[0100]
(1)所有uwb标签只发不收,智能眼镜100端的uwb模块只收不发
[0101]
(2)uwb标签每隔一段时间(取决于其功耗限制)对外广播一次信号,广播前先侦听信道。如果信道没占用则直接广播;如果信道被占用时继续侦听直到信道空闲再广播。
[0102]
(3)智能眼镜100的uwb定位模块接收到不同标签的pdoa值,将pdoa与aoa进行映射,通过筛选出在特定范围内的aoa,则可以认为智能眼镜100对准标签,例如-10
°
≤aoa≤10
°
,智能眼镜100端获得对准标签的id,并与对应的居家设备的id相连。
[0103]
上文结合图1至图7,详细描述了本技术的装置实施例,下面结合图8至图10,详细描述本技术的方法实施例。应理解,方法实施例的描述与装置实施例的描述相互对应,因此,未详细描述的部分可以参见前面装置实施例。
[0104]
图8为本技术实施例提出的一种智能眼镜100辅助用户学习的方法的流程示意图。如图8所示,该方法800包括如下步骤:s810~s850。
[0105]
在步骤s810:通过智能眼镜100观看第一物体200。
[0106]
在步骤s820:若当前的作业场景为用户伏案学习场景,此时的第一物体200例如可
以是课本。可以采用手动操控模式或智能操控模式将智能眼镜视100调整为伏案学习模式,并跳至步骤s830。例如可以通过对触摸模块110的触摸操作来进入学习模式,也可以通过头部的移动幅度或速度进行智能操控,来进入学习模式。若不需要切换为学习模式,则跳至步骤s810。
[0107]
在步骤s830:通过智能眼镜100识别该智能眼镜100与第一物体200之间的第一相对位置信息,例如可以包括角度信息、距离信息等,并将第一相对位置信息与预设相对位置信息之间的差值进行比较,若差值在设定范围内,则认为是一个健康的坐姿或距离,则跳至步骤s850,否则,则认为当前坐姿或与第一物体200的距离是不健康的,同时跳至步骤s840。
[0108]
在步骤s840:智能眼镜100发出第一指示信息,该第一指示信息用于指示如何调整坐姿,待调整后,跳至步骤s830。在一些实施例中,第一指示信息可以是显示指示信息,比如可以是显示在光学组件上的文字提醒信息或正确的坐姿图像信息。第一指示信息也可以是震动指示信息,比如根据智能眼镜100与第一物体200之间的距离满足预设阈值时,则发出震动提醒。其距离越近,智能眼镜100的震动频率越高。当然,第一指示信息还可以是其他类型的指示信息。
[0109]
在步骤s850:正常学习。
[0110]
图9为本技术实施例提出的一种智能眼镜100辅助用户导航寻物的方法的流程示意图。如图9所示,该方法900包括如下步骤:s910~s940。
[0111]
在步骤s910:通过智能眼镜100观看第一物体200。
[0112]
在步骤s920:若当前的作业场景为导航寻物场景,此时的第一物体200例如可以是手机。可以采用手动操控模式或智能操控模式将智能眼镜视100调整为导航寻物模式,并跳至步骤s930。例如可以通过对触摸模块110的触摸操作来进入导航寻物模式,也可以通过头部的移动幅度或速度进行智能操控,来进入导航寻物模式。若不需要切换为导航寻物模式,则跳至步骤s910。
[0113]
在步骤s930:智能眼镜100通过uwb定位模块101可以识别第一物体200中的uwb标签id信息,然后可以获取第一物体200相对于智能眼镜100的坐标位置。处理模块102可以根据该坐标位置信息发出第一指示信息,以辅助用户快速找到该第一物体200。第一指示信息可以是显示在光学组件上的箭头前进方向。当然,第一指示信息也可以是震动指示信息,比如根据震动频率来判断相对位置的距离,或其他类型的指示信息。
[0114]
在步骤s940:找到第一物体200。
[0115]
图10为本技术实施例提出的一种智能眼镜100辅助用户管理时间的方法的流程示意图。如图10所示,该方法1000包括如下步骤:s1010~s1050。
[0116]
在步骤s1010:通过智能眼镜100观看第一物体200。
[0117]
在步骤s1020:若当前的作业场景为看电视或电脑打游戏场景,此时的第一物体200例如可以是电视或电脑。可以采用手动操控模式或智能操控模式将智能眼镜视100调整为时间管理模式,并跳至步骤s1030。例如可以通过对触摸模块110的触摸操作来进入时间管理模式,也可以通过头部的移动幅度或速度进行智能操控,来进入时间管理模式。若不需要切换为时间管理模式,则跳至步骤s1010。
[0118]
在步骤s1030:通过智能眼镜100记录观看第一物体200的当前时间,当前时间包括观看的时间长度或当前时刻,将当前时间与预设时间进行比较,若差值在设定范围内,则认
为是一个健康的观看时间,则跳至步骤s1040,否则,则认为超过了健康观看时间,同时跳至步骤s1050。
[0119]
在步骤s1040:继续实时监测当前时间,以及当前时间与预设时间的差值。
[0120]
在步骤s1050:当前时间与预设时间的差值超出了设定范围,损害用户健康,提示停止观看。
[0121]
图11为本技术实施例提出的一种智能眼镜100辅助用户视屏拍照的方法的流程示意图。如图11所示,该方法1100包括如下步骤:s1110~s1140。
[0122]
在步骤s1110:切换为视屏拍照模式。可以采用手动操控模式或智能操控模式将智能眼镜视100调整为视屏拍照模式,并跳至步骤s1120。例如可以通过对触摸模块110的触摸操作来进入视屏拍照模式,也可以通过头部的移动幅度或速度进行智能操控,来进入视屏拍照模式。
[0123]
在步骤s1120:智能眼镜100观看要拍摄的第一物体200的时间大于或等于预设拍摄时间值(例如可以设置为3s),则自动光学对焦。然后选择录像或拍照,例如可以通过语音的方式进行选择。当拍照或录像结束后,可以选择视屏或照片的存储模式,若选择本地存储,则跳至步骤s1140,若选择云空间存储,则跳至步骤s1130。应理解,可以采用手动操控模式或智能操控模式来选择当前的存储模式。例如可以通过对触摸模块110的触摸操作来选择存储模式,也可以通过语音或手势等智能操控,来选择存储模式。
[0124]
在步骤s1130:云空间存储,可以利用第一无线通信模块104与外部的云服务器进行通信,以上传至云空间进行存储。
[0125]
在步骤s1140:本地存储。
[0126]
在上述实施例中,可以全部或部分地通过软件、硬件、固件或者其他任意组合来实现。当使用软件实现时,可以全部或部分地以计算机程序产品的形式实现。所述计算机程序产品包括一个或多个计算机指令。在计算机上加载和执行所述计算机程序指令时,全部或部分地产生按照本公开实施例所述的流程或功能。所述计算机可以是通用计算机、专用计算机、计算机网络、或者其他可编程装置。所述计算机指令可以存储在机器可读存储介质中,或者从一个机器可读存储介质向另一个机器可读存储介质传输,例如,所述计算机指令可以从一个网站站点、计算机、服务器或数据中心通过有线(例如同轴电缆、光纤、数字用户线(digital subscriber line,dsl))或无线(例如红外、无线、微波等)方式向另一个网站站点、计算机、服务器或数据中心进行传输。所述机器可读存储介质可以是计算机能够存取的任何可用介质或者是包含一个或多个可用介质集成的服务器、数据中心等数据存储设备。所述可用介质可以是磁性介质(例如,软盘、硬盘、磁带)、光介质(例如数字视频光盘(digital video disc,dvd))、或者半导体介质(例如固态硬盘(solid state disk,ssd))等。
[0127]
本领域普通技术人员可以意识到,结合本公开实施例描述的各示例的单元及算法步骤,能够以电子硬件、或者计算机软件和电子硬件的结合来实现。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本公开的范围。
[0128]
在本公开所提供的几个实施例中,应该理解到,所揭露的系统、装置和方法,可以
通过其它的方式实现。例如,以上所描述的装置实施例仅仅是示意性的,例如,所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些接口,装置或单元的间接耦合或通信连接,可以是电性,机械或其它的形式。
[0129]
所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。
[0130]
另外,在本公开各个实施例中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。
[0131]
以上所述,仅为本公开的具体实施方式,但本公开的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本公开揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本公开的保护范围之内。因此,本公开的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。