人力驱动车用控制装置及动力传递系统
1.分案申请
2.本技术是申请日为2020年12月18日,申请号为:202011510857.x,发明名称为:人力驱动车用控制装置及动力传递系统的专利申请的分案申请。
技术领域
3.本发明涉及一种人力驱动车用的控制装置及动力传递系统。
背景技术:
4.例如,在专利文献1中公开的人力驱动车包括拨链器,该拨链器操作传递体以变更变速比。
5.现有技术文献
6.专利文献
7.专利文献1:日本特开2008-222211号公报。
技术实现要素:
8.发明要解决的问题
9.本发明的目的之一是提供一种能够适当地变更变速比的人力驱动车用的控制装置及动力传递系统。
10.用于解决问题的方案
11.根据本发明的第一方面的控制装置为人力驱动车用的控制装置,其中,所述人力驱动车包括:曲柄轴;第一旋转体,其与所述曲柄轴连接;车轮;第二旋转体,其与所述车轮连接;传递体,其构成为与所述第一旋转体及所述第二旋转体卡合,并在所述第一旋转体与所述第二旋转体之间传递驱动力;拨链器,其构成为操作所述传递体,以变更所述车轮的转速相对于所述曲柄轴的转速的变速比;以及马达,其构成为驱动所述传递体,所述控制装置包括控制部,该控制部构成为控制所述马达,所述控制部构成为,在所述拨链器动作以变更所述变速比的情况下并且在满足与踩踏相关的预定条件情况下,以根据所述车轮的转速及所述变速比算出的第一转速、与预定转速或预定范围内的转速的差越大,则所述马达的转速越大的方式控制所述马达,并通过所述马达驱动所述传递体。
12.根据第一方面的控制装置,由于构成为,在拨链器动作以变更变速比的的情况下并且在满足与踩踏相关的预定条件的情况下,控制马达并通过马达驱动传递体,因此能够适当地变更变速比。根据第一方面的控制装置,由于以根据车轮的转速及变速比算出的第一转速、与预定转速或者预定范围内的转速的差越大,则马达的转速越大的方式控制马达来驱动传递体,因此能够适当地变更变速比。
13.在根据本发明的第一方面的第二方面的控制装置中,所述第一转速、所述预定转速、及所述预定范围内的转速与所述曲柄轴的转速对应。
14.根据第二方面的控制装置,能够根据曲柄轴的转速适当地控制马达。
15.在根据本发明的第二方面的第三方面的控制装置中,所述预定转速和所述预定范围内的转速为50rpm以上且80rpm以下的转速。
16.根据第三方面的控制装置,使用者易于将曲柄轴的转速维持为50rpm以上且80rpm以下的转速。
17.根据本发明的第四方面的控制装置为人力驱动车用的控制装置,其中,所述人力驱动车包括:曲柄轴;第一旋转体,其与所述曲柄轴连接;车轮;第二旋转体,其与所述车轮连接;传递体,其构成为与所述第一旋转体及所述第二旋转体卡合,并在所述第一旋转体与所述第二旋转体之间传递驱动力;拨链器,其构成为操作所述传递体,以变更所述车轮的转速相对于所述曲柄轴的转速的变速比;以及马达,其构成为驱动所述传递体,所述控制装置包括控制部,该控制部构成为控制所述马达,所述控制部构成为,在所述拨链器动作以变更所述变速比的情况下并且在满足与踩踏相关的预定条件的情况下,以根据所述人力驱动车在行进方向上的加速度变更所述马达的转速,且所述人力驱动车的加速度越大,则所述马达的所述转速越大的方式,控制所述马达,并通过所述马达驱动所述传递体。
18.根据第四方面的控制装置,由于构成为,在拨链器动作以变更变速比的情况下并且在满足与踩踏相关的预定条件的情况下,控制马达并通过马达驱动传递体,因此能够适当地变更变速比。根据第四方面的控制装置,由于以人力驱动车的加速度越大,则马达的转速越大的方式,控制马达,并通过马达驱动传递体,因此能够适当地变更变速比。
19.根据本发明的第五方面的控制装置为人力驱动车用的控制装置,其中,所述人力驱动车包括:曲柄轴;第一旋转体,其与所述曲柄轴连接;车轮;第二旋转体,其与所述车轮连接;传递体,其与所述第一旋转体及所述第二旋转体卡合,并在所述第一旋转体与所述第二旋转体之间传递驱动力;拨链器,其构成为操作所述传递体以变更所述车轮的转速相对于所述曲柄轴的转速的变速比;以及马达,其构成为驱动所述传递体,所述控制装置包括控制部,该控制部构成为控制所述马达,所述控制部构成为,在所述拨链器动作以变更所述变速比的情况下并且在满足与踩踏相关的预定条件的情况下,以根据所述人力驱动车的状态,变更所述马达的旋转角度及所述马达的输出转矩中的至少一者的方式控制所述马达,并通过所述马达驱动所述传递体。
20.根据第五方面的控制装置,由于构成为,在拨链器动作以变更变速比的情况下并且在满足与踩踏相关的预定条件的情况下,控制马达并通过马达驱动传递体,因此能够适当地变更变速比。根据第五方面的控制装置,由于构成为,以根据人力驱动车的状态变更马达的旋转角度及马达的输出转矩中的至少一者的方式控制马达,并通过马达驱动传递体,因此能够适当地变更变速比。
21.在根据本发明的第五方面的第六方面的控制装置中,所述人力驱动车的状态包括所述车轮的转速和所述变速比,所述控制部构成为,以根据所述车轮的所述转速及所述变速比算出的第一转速、与预定转速或预定范围内的转速的差越大,则所述马达的旋转角度及所述输出转矩中的至少一者越大的方式,控制所述马达。
22.根据第六方面的控制装置,由于构成为,以根据车轮的转速及变速比算出的第一转速、与预定转速或预定范围内的转速的差越大,则马达的转速越大的方式,控制马达,因此能够适当地变更变速比。
23.在根据本发明的第五方面的第七方面的控制装置中,所述人力驱动车的状态包括
所述人力驱动车的车速变化或所述车轮的转速变化,所述控制部构成为,以所述人力驱动车在行进方向上的加速度或减速度越大,或者所述车轮的转速在与所述人力驱动车的行进方向对应的旋转方向上的加速度或减速度越大,则所述马达的旋转角度及输出转矩中的至少一者越大的方式,控制所述马达。
24.根据第七方面的控制装置,由于构成为,以人力驱动车在行进方向上的加速度或减速度越大,或者车轮的转速在与人力驱动车的行进方向对应的旋转方向上的加速度或减速度越大,则马达的旋转角度及输出转矩中的至少一者越大的方式,控制马达,因此能够适当地变更变速比。
25.在根据本发明的第一~第七方面中任一方面的第八方面的控制装置中,所述人力驱动车还包括第一操作装置,所述控制部构成为,在所述拨链器动作以变更所述变速比的情况下并且在满足与所述踩踏相关的预定条件的情况下,若所述第一操作装置被操作,则控制所述马达不驱动所述传递体。
26.根据第八方面的控制装置,由于所述控制部构成为,在拨链器动作以变更变速比的情况下,并且在满足与踩踏相关的预定条件的情况下,若操作装置被操作,则控制马达不驱动传递体,因此能够降低马达的驱动频率。
27.根据本发明的第九方面的控制装置为人力驱动车用的控制装置,其中,所述人力驱动车包括曲柄轴;第一旋转体,其与所述曲柄轴连接;车轮;第二旋转体,其与所述车轮连接;传递体,其构成为与所述第一旋转体及所述第二旋转体卡合,并在所述第一旋转体与所述第二旋转体之间传递驱动力;拨链器,其构成为操作所述传递体,以变更所述车轮的转速相对于所述曲柄轴的转速的变速比;马达,其构成为驱动所述传递体;以及第一操作装置,所述控制装置包括控制部,该控制部构成为控制所述马达,所述控制部构成为,在所述拨链器动作以变更所述变速比的情况下并且在满足与踩踏相关的预定条件的情况下,控制所述马达,以通过所述马达驱动所述传递体,在所述拨链器动作以变更所述变速比的情况下并且在满足与所述踩踏相关的预定条件的情况下,若所述第一操作装置被操作,则控制所述马达不驱动所述传递体。
28.根据第九方面的控制装置,由于构成为,在拨链器动作以变更变速比的情况下并且在满足与踩踏相关的预定条件的情况下,控制马达,以通过马达驱动传递体,因此能够适当地变更变速比。根据第九方面的控制装置,由于构成为,在拨链器动作以变更变速比的情况下并且在满足与踩踏相关的预定条件的情况下,若第一操作装置被操作,则控制马达不驱动传递体,因此使用者能够选择是否通过马达驱动传递体来进行变速。
29.在根据本发明的第九方面的第十方面的控制装置中,所述控制部构成为,在所述拨链器动作以变更所述变速比的情况下并且在满足与所述踩踏相关的预定条件的情况下,在所述第一操作装置被操作期间、及所述第一操作装置被操作后的预定期间的至少一个期间内,控制所述马达不驱动所述传递体。
30.根据第十方面的控制装置,在第一操作装置被操作期间、及第一操作装置被操作后的预定期间的至少一个期间内,即使在拨链器动作以变更变速比的情况下并且在满足与踩踏相关的预定条件的情况下,也能够控制马达不驱动传递体。根据第十方面的控制装置,当使用者想要抑制变速比的变更的情况下,能够通过操作第一操作装置容易地抑制变速比的变更。
31.在根据本发明的第九或第十方面的第十一方面的控制装置中,所述控制部构成为,在所述拨链器动作以变更所述变速比的情况下并且在满足与所述踩踏相关的预定条件的情况下,若所述第一操作装置所包括的第一操作部被操作或者对所述第一操作部进行了预定操作,则控制所述马达不驱动所述传递体。
32.根据第十一方面的控制装置,若第一操作装置所包括的第一操作部被操作或者对第一操作部进行了预定操作,即使在拨链器动作以变更变速比的情况下并且在满足与踩踏相关的预定条件的情况下,也能够控制马达不驱动传递体。根据第十一方面的控制装置,在使用者想要抑制变速比的变更的情况下,能够通过操作第一操作装置容易地抑制变速比的变更。
33.在根据本发明的第八~第十一方面中的任一方面的第十二方面的控制装置中,所述人力驱动车还包括第二操作装置,该第二操作装置构成为操作所述拨链器,所述控制部构成为,能够切换第一模式与第二模式,在所述第一模式下,在所述第二操作装置被操作的情况下并且在满足与所述踩踏相关的预定条件的情况下,控制所述马达,以根据所述人力驱动车的状态驱动所述传递体,在所述第二模式下,在所述第二操作装置被操作的情况下并且在满足所述与踩踏相关的预定条件的情况下,控制所述马达不驱动所述传递体。
34.根据第十二方面的控制装置,通过切换第一模式与第二模式,使用者能够选择是否通过马达驱动传递体来进行变速。
35.在根据本发明的第一~第十二方面中的任一方面的第十三方面的控制装置中,所述控制部构成为,在所述拨链器动作以变更所述变速比的情况下并且在满足与所述踩踏相关的预定条件的情况下,根据所述马达的负载控制所述马达,以停止所述马达对所述传递体的驱动。
36.根据第十三方面的控制装置,在拨链器动作而变更变速比的情况下并且在满足与踩踏相关的预定条件的情况下,能够根据马达的负载控制马达,以停止马达对传递体的驱动。根据第十三方面的控制装置,能够抑制仅由马达推进人力驱动车。
37.根据本发明的第十四方面的控制装置为人力驱动车用的控制装置,其中,所述人力驱动车包括:曲柄轴;第一旋转体,其与所述曲柄轴连接;车轮;第二旋转体,其与所述车轮连接;传递体,其构成为与所述第一旋转体及所述第二旋转体卡合,并在所述第一旋转体与所述第二旋转体之间传递驱动力;拨链器,其构成为操作所述传递体,以变更所述车轮的转速相对于所述曲柄轴的转速的变速比;以及马达,其构成为驱动所述传递体,所述控制装置包括控制部,该控制部构成为控制所述马达,所述控制部构成为,在所述拨链器动作以变更所述变速比的情况下并且在满足与踩踏相关的预定条件的情况下,通过所述马达来驱动所述传递体,并根据所述马达的负载控制所述马达,以停止所述马达对所述传递体的驱动。
38.根据第十四方面的控制装置,由于构成为,在拨链器动作以变更变速比的情况下并且在满足与踩踏相关的预定条件的情况下,能够控制马达,以通过马达驱动传递体,因此能够适当地变更变速比。根据第十四方面的控制装置,在拨链器动作以变更变速比的情况下并且在满足与踩踏相关的预定条件的情况下,能够根据马达的负载来控制马达,以停止马达对传递体的驱动。
39.在根据本发明的第十三或第十四方面的第十五方面的控制装置中,包括第一检测部,该第一检测部构成为检测所述马达的所述负载,所述控制部构成为,在所述拨链器动作
以变更所述变速比的情况下、在满足与踩踏相关的预定条件的情况下、并且在所述马达的所述负载达到预定负载以上的情况下,控制所述马达使,以使所述马达停止。
40.根据第十五方面的控制装置,在拨链器动作以变更变速比的情况下、在满足与踩踏相关的预定条件的情况下、并且在马达的负载达到预定负载以上的情况下,能够控制马达以使马达停止。根据第十五方面的控制装置,能够抑制仅由马达推进人力驱动车。
41.在根据本发明的第一~第十五方面中的任一方面的第十六方面的控制装置中,所述控制部构成为,在满足与所述踩踏相关的预定条件的情况下,若所述人力驱动车的车速为第一速度以下、或者所述车轮的转速为预定转速以下,则控制所述马达,以停止对所述传递体的驱动。
42.根据第十六方面的控制装置,在拨链器动作以变更变速比的情况下并且在满足与踩踏相关的预定条件的情况下,若人力驱动车的车速为第一速度以下、或者车轮的转速为预定转速以下,则能够控制马达,以停止对传递体的驱动。根据第十六方面的控制装置,当人力驱动车的车速较低时,能够抑制变速。
43.根据本发明的第十七方面的控制装置为人力驱动车用的控制装置,其中,所述人力驱动车包括:曲柄轴;第一旋转体,其与所述曲柄轴连接;车轮;第二旋转体,其与所述车轮连接;传递体,其构成为与所述第一旋转体及所述第二旋转体卡合,并在所述第一旋转体与所述第二旋转体之间传递驱动力;拨链器,其构成为操作所述传递体,以变更所述车轮的转速相对于所述曲柄轴的转速的变速比;以及马达,其构成为驱动所述传递体,所述控制装置包括控制部,该控制部构成为控制所述马达,所述控制部构成为,在所述拨链器动作以变更所述变速比的情况下并且在满足与踩踏相关的预定条件的情况下,通过所述马达驱动所述传递体,若所述人力驱动车的车速为第一速度以下或者所述车轮的转速为预定转速以下,则控制所述马达,以停止对所述传递体的驱动。
44.根据第十七方面的控制装置,由于构成为,在拨链器动作以变更变速比的情况下并且在满足与踩踏相关的预定条件的情况下,控制马达,以通过马达驱动传递体,因此能够适当地变更变速比。根据第十七方面的控制装置,若人力驱动车的车速为第一速度以下、或者车轮的转速为预定转速以下,则能够控制马达,以停止对传递体的驱动。根据第十七方面的控制装置,在人力驱动车的车速较低的情况下,能够抑制变速。
45.在根据本发明的第一~第十七方面中的任一方面的第十八方面的控制装置,所述人力驱动车还包括电动致动器,该电动致动器构成为操作所述拨链器,所述控制部构成为控制所述电动致动器。
46.根据第十八方面的控制装置,能够通过控制电动致动器操作拨链器。
47.根据本发明的第十八方面的第十九方面的控制装置中,所述控制部构成为,在所述拨链器动作以变更所述变速比的情况下并且在满足与踩踏相关的预定条件的情况下,控制所述电动致动器,以使所述变速比仅在增加方向及减少方向中的一个方向上变更,并通过所述马达驱动所述传递体。
48.根据第十九方面的控制装置,由于在满足与踩踏相关的预定条件的情况下,能够使变速比仅在增加方向及减少方向中的一个方向上变更,因此能够减轻控制部的处理负担。
49.根据本发明的第二十方面的控制装置为人力驱动车用的控制装置,其中,所述人
力驱动车包括:曲柄轴;第一旋转体,其与所述曲柄轴连接;车轮;第二旋转体,其与所述车轮连接;传递体,其构成为与所述第一旋转体及所述第二旋转体卡合,并在所述第一旋转体与所述第二旋转体之间传递驱动力;拨链器,其构成为操作所述传递体,以变更所述车轮的转速相对于所述曲柄轴的转速的变速比;马达,其构成为驱动所述传递体;以及电动致动器,其构成为操作所述拨链器,所述控制装置包括控制部,该控制部构成为控制所述电动致动器及所述马达,所述控制部构成为,在所述拨链器动作以变更所述变速比的情况下并且在满足与踩踏相关的预定条件的情况下,控制所述电动致动器,以使所述变速比仅在增加方向及减少方向中的一个方向上变更,并通过所述马达驱动所述传递体。
50.根据第二十方面的控制装置,由于构成为,在拨链器动作以变更变速比的情况下并且满足与踩踏相关预定条件的情况下,控制马达并通过马达驱动传递体,因此能够适当地变更变速比。根据第二十方面的控制装置,由于在满足与踩踏相关的预定条件的情况下,能够使变速比仅在增加方向及减少方向中的一个方向上变更,因此能够减轻控制部的处理负担。
51.在根据本发明的第十九或第二十方面的第二十一方面的控制装置中,所述控制部构成为,在所述拨链器动作以变更所述变速比的情况下并且在满足与踩踏相关的预定条件的情况下,控制所述电动致动器,以在预定的变速范围内变更所述变速比,并通过所述马达驱动所述传递体。
52.根据第二十一方面的控制装置,在满足与踩踏相关的预定条件的情况下,能够在适当的变速范围内变更变速比。
53.根据本发明的第二十二方面的控制装置为人力驱动车用的控制装置,其中,所述人力驱动车包括:曲柄轴;第一旋转体,其与所述曲柄轴连接;车轮;第二旋转体,其与所述车轮连接;传递体,其构成为与所述第一旋转体及所述第二旋转体卡合,并在所述第一旋转体与所述第二旋转体之间传递驱动力;拨链器,其构成为操作所述传递体,以变更所述车轮的转速相对于所述曲柄轴的转速的变速比;马达,其构成为驱动所述传递体;以及电动致动器,其构成为操作所述拨链器,所述控制装置包括控制部,该控制部构成为控制所述电动致动器及所述马达,所述控制部构成为,在所述拨链器动作以变更所述变速比的情况下并且在满足与踩踏相关的预定条件的情况下,控制所述电动致动器,以在预定的变速范围内变更所述变速比,并通过所述马达驱动所述传递体。
54.根据第二十二方面的控制装置,由于构成为,在拨链器动作以变更变速比的情况下并且在满足与踩踏相关预定的条件的情况下,控制马达并通过马达驱动传递体,因此能够适当地变更变速比。根据第二十二方面的控制装置,在满足与踩踏相关预定的条件的情况下,能够在适当的变速范围内变更变速比。
55.在根据本发明的第二十一或第二十二方面的第二十三方面的控制装置中,所述预定的变速范围包括预定的第三变速比以下的范围,所述预定的第三变速比小于能够通过所述拨链器变更的所述变速比中的最大的所述变速比。
56.根据第二十三方面的控制装置,由于在满足与踩踏相关预定的条件的情况下,抑制变速比变为能够通过拨链器变更的变速比中的最大的变速比,因此能够抑制使用者的负担过度增加。
57.在根据本发明的第二十三方面的第二十四方面的控制装置中,所述控制部控构成
为,在所述拨链器动作以变更所述变速比且满足与踩踏相关的预定条件且所述人力驱动车的行驶道路从上坡变成下坡的情况、以及所述拨链器动作以变更所述变速比且满足与踩踏相关的预定条件且所述人力驱动车的车速从增加状态变成减速状态的情况中的至少一种情况下,控制所述电动致动器,以在所述预定的变速范围内变更所述变速比,并通过所述马达驱动所述传递体。
58.根据第二十四方面的控制装置,在人力驱动车的行驶道路从上坡变成下坡的情况、以及人力驱动车的车速从增加状态变成减速状态的情况中的至少一种情况下,能够变更为适当的变速比。
59.在根据本发明的第二十一~第二十四方面中的任一方面的第二十五方面的控制装置中,所述预定的变速范围包括预定的第四变速比以上的范围,所述预定的第四变速比大于能够通过所述拨链器变更的所述变速比中的最小的所述变速比。
60.根据第二十五方面的控制装置,由于在满足与踩踏相关的预定条件的情况下,抑制变速比变更为能够通过拨链器变更的变速比中的最小的变速比,因此可抑制使用者过度增加旋转的曲柄转速。
61.在根据本发明的第二十五方面的第二十六方面的控制装置中,所述控制部构成为,在所述拨链器动作以变更所述变速比且满足与踩踏相关的预定条件且所述人力驱动车的车速为预定的第六速度以下的情况、以及所述拨链器动作以变更所述变速比且满足与踩踏相关的预定条件且所述人力驱动车的曲柄轴的转速为预定的第三转速以下的情况中的至少一种情况下,控制所述电动致动器,以在所述预定的变速范围内变更所述变速比,并通过所述马达驱动所述传递体。
62.根据第二十六方面的控制装置,在人力驱动车的车速为预定的第六速度以下的情况、以及人力驱动车的曲柄轴的转速为预定的第三转速以下的情况中的至少一种情况下,能够变更为适当的变速比。
63.在根据本发明的第十八~第二十六方面中的任一方面的第二十七方面的控制装置中,所述控制部构成为,能够切换根据所述人力驱动车的状态来控制所述电动致动器的第一变速模式、和根据设于所述人力驱动车的变速操作装置的操作来控制所述电动致动器的第二变速模式,在所述第一变速模式下,能够切换第三模式与第四模式,在所述第三模式下,在所述拨链器动作以变更所述变速比的情况下并且在满足与所述踩踏相关的预定条件的情况下,控制所述马达,以根据所述人力驱动车的状态驱动所述传递体,在所述第四模式下,在所述拨链器动作以变更所述变速比的情况下并且在满足与所述踩踏相关的预定条件的情况下,控制所述马达,以不驱动所述传递体。
64.根据第二十七方面的控制装置,在第一变速模式下,使用者能够切换自动驱动传递体的第三模式、和由使用者使传递体被驱动的第四模式。
65.根据本发明的第二十八方面的控制装置为人力驱动车用的控制装置,其中,所述人力驱动车包括:曲柄轴:第一旋转体,其与所述曲柄轴连接;车轮;第二旋转体,其与所述车轮连接;传递体,其构成为与所述第一旋转体及所述第二旋转体卡合,并在所述第一旋转体与所述第二旋转体之间传递驱动力;拨链器,其构成为操作所述传递体,以变更所述车轮的转速相对于所述曲柄轴的转速的变速比;马达,其构成为驱动所述传递体;以及电动致动器,其构成为操作所述拨链器,所述控制装置包括控制部,该控制部构成为控制所述电动致
动器及所述马达,所述控制部构成为,能够切换根据所述人力驱动车的状态来控制所述电动致动器的第一变速模式、和根据设于所述人力驱动车的变速操作装置的操作来控制所述电动致动器的第二变速模式,在所述第一变速模式下,能够切换第三模式与第四模式,在所述第三模式下,在所述拨链器动作以变更所述变速比的情况下并且在满足与踩踏相关的预定条件的情况下,控制所述马达,以根据所述人力驱动车的状态驱动所述传递体,在所述第四模式下,在所述拨链器动作以变更所述变速比的情况下并且在满足与所述踩踏相关的预定条件的情况下,控制所述马达,以不驱动所述传递体。
66.根据第二十八方面的控制装置,由于构成为,在拨链器动作以变更变速比的情况下并且在满足与踩踏相关的预定条件的情况下,控制马达并通过马达驱动传递体,因此能够适当地变更变速比。根据第二十八方面的控制装置,在第一变速模式下,使用者能够切换自动驱动传递体的第三模式、和由使用者使传递体被驱动的第四模式。
67.在根据本发明的第二十九方面的控制装置为人力驱动车用的控制装置,其中,所述人力驱动车包括:曲柄轴;第一旋转体,其与所述曲柄轴连接;车轮;第二旋转体,其与所述车轮连接;传递体,其构成为与所述第一旋转体及所述第二旋转体卡合,并在所述第一旋转体与所述第二旋转体之间传递驱动力;拨链器,其构成为操作所述传递体,以变更所述车轮的转速相对于所述曲柄轴的转速的变速比;电动致动器,其构成为操作所述拨链器;以及马达,其构成为驱动所述传递体,所述控制装置包括控制部,该控制部构成为控制所述电动致动器及所述马达,以使根据所述车轮的转速及所述变速比算出的第一转速落入预定范围内,所述控制部构成为,在所述拨链器动作以变更所述变速比的情况下并且在满足与踩踏相关的预定条件的情况下,通过所述马达驱动所述传递体,并且,控制所述电动致动器,以使在所述拨链器的多个变速档中,当所述第一转速落入所述预定范围内的情况下,变成所述多个变速档中所述变速比最大的变速档。
68.根据第二十九方面的控制装置,由于构成为,在拨链器动作以变更变速比的情况下并且在满足与踩踏相关的预定条件的情况下,控制马达,以通过马达驱动传递体,因此能够适当地变更变速比。根据第二十九方面的控制装置,控制电动致动器,以在拨链器的多个变速档中,当第一转速落入所述预定范围内的情况下,变成多个变速档中变速比最大的变速档。根据第二十九方面的控制装置,能够根据人力驱动车的车速变更为最佳的变速档。
69.在根据本发明的第十八~第二十九方面中的任一方面的第三十方面的控制装置中,所述控制部构成为,在所述拨链器动作以变更所述变速比的情况下并且在满足与所述踩踏相关的预定条件的情况下,控制所述马达,以通过所述马达驱动所述传递体,在所述人力驱动车的车速为第二速度以上、或者所述车轮的转速为预定的转速以上的情况下,控制所述电动致动器,以使所述变速比不增大。
70.根据第三十方面的控制装置,在人力驱动车的车速为第二速度以上、或者车轮的转速为预定转速以上的情况下,能够抑制变速比变大。根据第三十方面的控制装置,能够抑制人力驱动车的车速变得过大。
71.在根据本发明的第三十一方面的控制装置为人力驱动车用的控制装置,其中,所述人力驱动车包括:曲柄轴;第一旋转体,其与所述曲柄轴连接;车轮;第二旋转体,其与所述车轮连接;传递体,其构成为与所述第一旋转体及所述第二旋转体卡合,并在所述第一旋转体与所述第二旋转体之间传递驱动力;拨链器,其构成为操作所述传递,以变更所述车轮
的转速相对于所述曲柄轴的转速的变速比;电动致动器,其构成为操作所述拨链器;以及马达,其构成为驱动所述传递体,所述控制装置包括控制部,该控制部构成为控制所述电动致动器及所述马达,所述控制部构成为,在所述拨链器动作以变更所述变速比的情况下并且在满足与踩踏相关的预定条件的情况下,控制所述马达,以通过所述马达驱动所述传递体,在所述人力驱动车的车速为第二速度以上、或者所述车轮的转速为预定的转速以上的情况下,控制所述电动致动器,以使所述变速比不增大。
72.根据第三十一方面的控制装置,由于构成为,在拨链器动作以变更变速比的情况下并且在满足与踩踏相关的预定条件的情况下,控制马达,以通过马达驱动传递体,因此能够适当地变更变速比。根据第三十一方面的控制装置,在人力驱动车的车速为第二速度以上、或者车轮的转速为预定转速以上的情况下,能够抑制变速比变大。根据第三十一方面的控制装置,能够抑制人力驱动车的车速变得过大。
73.在根据本发明的第二十九~第三十一方面中的任一方面的第三十二方面的控制装置中,所述控制部构成为,在所述拨链器动作的情况下,控制所述电动致动器,以使在满足与变速相关的第一条件之前不变更所述变速比。
74.根据第三十二方面的控制装置,在拨链器动作的情况下,能够控制电动致动器,以在满足与变速相关的第一条件之前不变更变速比。根据第三十二方面的控制装置,可抑制拨链器连续地动作。
75.根据本发明的第三十三方面的控制装置为人力驱动车用的控制装置,其中,所述人力驱动车包括:曲柄轴;第一旋转体,其与所述曲柄轴连接;车轮;第二旋转体,其与所述车轮连接;传递体,其构成为与所述第一旋转体及所述第二旋转体卡合,并在所述第一旋转体与所述第二旋转体之间传递驱动力;拨链器,其构成为操作所述传递体,以变更所述车轮的转速相对于所述曲柄轴的转速的变速比;电动致动器,其构成为使所述拨链器动作;以及马达,其构成为驱动所述传递体,所述控制装置包括控制部,该控制部构成为控制所述马达及所述电动致动器,所述控制部构成为,在通过所述电动致动器使所述拨链器动作以变更所述变速比的情况下并且在满足与踩踏相关的预定条件的情况下,控制所述马达,以驱动所述传递体,在所述拨链器动作的情况下,控制所述电动致动器,以使在满足与变速相关的第一条件之前不变更所述变速比。
76.根据第三十三方面的控制装置,由于构成为,在拨链器动作以变更变速比的情况下并且满足与踩踏相关预定条件的情况下,控制马达,以通过马达驱动传递体,因此能够适当地变更变速比。根据第三十三方面的控制装置,在人力驱动车的车速为第二速度以上、或者车轮的转速为预定转速以上的情况下,能够控制电动致动器,以在满足与变速相关的第一条件之前不变更变速比。根据第三十三方面的控制装置,在人力驱动车的车速为第二速度以上、或者车轮的转速为预定转速以上的情况下,能够抑制拨链器连续地动作。
77.在根据本发明的第三十二或第三十三方面的第三十四方面的控制装置中,所述人力驱动车还包括第二操作装置,该第二操作装置构成为操作所述拨链器,在所述第二操作装置被操作后经过了预定的第一时间的情况、所述电动致动器停止后经过了预定的第二时间的情况、所述人力驱动车的倾斜角度为预定的第一角度以上的情况、以及所述人力驱动车的车速为预定的第三速度以上的情况中的至少一种情况下,满足与所述变速相关的第一条件。
78.根据第三十四方面的控制装置,在第二操作装置被操作后经过了预定的第一时间的情况、电动致动器停止后经过了预定的第二时间的情况、人力驱动车的倾斜角度为预定的第一角度以上的情况、以及人力驱动车的车速为预定的第三速度以上的情况中的至少一者成立之前,控制电动致动器不变更变速比。
79.在根据本发明的第十八~第三十四方面中的任一方面的第三十五方面的控制装置中,所述控制部构成为,在控制所述电动致动器及所述马达,以使所述变速比在预定的第三时间内增减预定次数以上的情况下,控制所述电动致动器,以在满足与变速相关的第二条件之前,使所述拨链器不变更所述变速比。
80.根据第三十五方面的控制装置,在控制电动致动器及马达,以使变速比在预定的第三时间内增减预定次数以上的情况下,能够控制电动致动器,以在满足与变速相关的第二条件之前,使拨链器不变更变速比。根据第三十五方面的控制装置,能够抑制变速比的频繁变更。
81.根据本发明的第三十六方面的控制装置为人力驱动车用的控制装置,其中,所述人力驱动车包括:曲柄轴;第一旋转体,其与所述曲柄轴连接;车轮;第二旋转体,其与所述车轮连接;传递体,其构成为与所述第一旋转体及所述第二旋转体卡合,并在所述第一旋转体与所述第二旋转体之间传递驱动力;拨链器,其构成为操作所述传递体,以变更所述车轮的转速相对于所述曲柄轴的转速的变速比;电动致动器,其构成为使所述拨链器动作;以及马达,其驱动所述传递体,所述控制装置包括控制部,该控制部构成为控制所述电动致动器及所述马达,所述控制部构成为,在通过所述电动致动器使所述拨链器动作以变更所述变速比的情况下并且在满足与踩踏相关的预定条件的情况下,控制所述马达,以驱动所述传递体,在控制所述电动致动器及所述马达,以使所述变速比在预定的第三时间内增减预定次数以上的情况下,控制所述电动致动器,以在满足与变速相关的第二条件之前,使所述拨链器不变更所述变速比。
82.根据第三十六方面的控制装置,由于构成为,在拨链器动作以变更变速比的情况下并且在满足与踩踏相关的预定条件的情况下,控制马达,以通过马达驱动传递体,因此能够适当地变更变速比。根据第三十六方面的控制装置,在控制电动致动器及马达,以使变速比在预定的第三时间内增减预定次数以上的情况下,能够控制电动致动器,以在满足与变速相关的第二条件之前,使拨链器不变更变速比。根据第三十六方面的控制装置,能够抑制变速比的频繁变更。
83.在根据本发明的第三十五或第三十六方面的第三十七方面的控制装置中,在所述电动致动器停止后经过了预定的第四时间的情况、所述人力驱动车的倾斜角度为预定的第二角度以上的情况、以及所述人力驱动车的车速为预定的第四角度以上的情况中的至少一种情况下,满足与所述变速相关的第二条件。
84.根据第三十七方面的控制装置,在电动致动器停止后经过了预定的第四时间的情况、人力驱动车的倾斜角度为预定的第二角度以上的情况、以及人力驱动车的车速为预定的第四角度以上的情况中的至少一者成立之前,能够控制电动致动器,以使拨链器不变更变速比。
85.在根据本发明的第十九~第三十五方面中的任一方面的第三十八方面的控制装置中,所述控制部构成为,在控制所述电动致动器及所述马达来变更所述变速比的情况下
并且在满足与所述踩踏相关的预定条件的情况下,控制所述电动致动器及所述马达,以在所述马达驱动的同时或所述马达驱动之前,开始所述第一旋转体及所述第二旋转体中的至少一者与所述拨链器的相对移动。
86.根据第三十八方面的控制装置,构成为控制电动致动器及所述马达,以在马达驱动的同时或者马达驱动之前,开始第一旋转体及第二旋转体中的至少一者与拨链器的相对移动。因此,能够适当地变更变速比。
87.根据本发明的第三十九方面的控制装置为人力驱动车用的控制装置,其中,所述人力驱动车包括:曲柄轴;第一旋转体,其与所述曲柄轴连接;车轮;第二旋转体,其与所述车轮连接;传递体,其构成为与所述第一旋转体及所述第二旋转体卡合,并在所述第一旋转体与所述第二旋转体之间传递驱动力;拨链器,其构成为操作所述传递体,以变更所述车轮的转速相对于所述曲柄轴的转速的变速比;电动致动器,其构成为使所述拨链器动作;以及马达,其构成为驱动所述传递体,所述控制装置包括控制部,该控制部构成为控制所述电动致动器及所述马达,所述控制部构成为,在控制所述电动致动器及所述马达来变更所述变速比的情况下并且在满足与踩踏相关的预定条件的情况下,控制所述电动致动器及所述马达,以在所述马达驱动的同时或所述马达驱动之前,开始所述第一旋转体及所述第二旋转体中的至少一者与所述拨链器的相对移动。
88.根据第三十九方面的控制装置,由于构成为,在拨链器动作以变更变速比的情况下并且满足与踩踏相关的预定条件的情况下,控制马达,以通过马达驱动传递体,因此能够适当地变更变速比。根据第三十九方面的控制装置,构成为控制电动致动器及所述马达,以在马达驱动的同时或者马达驱动之前,开始第一旋转体及第二旋转体中的至少一者与拨链器的相对移动。因此,能够适当地变更变速比。
89.在根据本发明的第三十八或第三十九方面的第四十方面的控制装置中,所述控制部构成为接收用于调整所述拨链器的位置的信号,在接收到所述信号的情况下,驱动所述马达,在与所述马达的转速及所述车轮的转速对应的第一变速比,与当前所述拨链器的位置不对应的情况下,控制所述电动致动器,以使所述拨链器的位置与所述第一变速比对应。
90.根据第四十方面的控制装置,由于在收到用于调整拨链器的位置的信号的情况下并且在与所述马达的转速及所述车轮的转速对应的第一变速比与当前所述拨链器的位置并不对应的情况下,驱动马达,因此能够适当地变更变速比。
91.在根据本发明的第十八~第四十方面中的任一方面的第四十一方面的控制装置中,所述控制部构成为,在所述拨链器动作以变更所述变速比的情况下并且在满足与所述踩踏相关的预定条件的情况下,控制所述马达,以通过所述马达驱动所述传递体,在所述人力驱动车减速的情况下,控制所述电动致动器,以使所述拨链器的变速档接近所述预定变速档、或者使所述变速比接近预定变速比,在所述预定变速档与所述拨链器的当前变速档的差、或者所述预定变速比与所述当前变速比的差为预定值以下的情况下,控制所述电动致动器以一级级地变更所述拨链器的所述变速档,若所述预定变速档与所述拨链器的当前变速档的差、或者所述预定变速比与所述当前变速比的差超过所述预定值,则控制所述电动致动器以使所述拨链器跨及多个变速档而连续动作。
92.根据第四十一方面的控制装置,若预定变速档与拨链器的当前变速档的差、或者预定变速比与当前变速比的差超过预定值,则能够控制电动致动器,以使拨链器跨及多个
变速档而连续动作。根据第四十一方面的控制装置,能够缩短使当前变速档变成优选变速档所需的时间、或者缩短使当前变速比变成优选变速比所需的时间。
93.根据本发明的第四十二方面的控制装置为人力驱动车用的控制装置,其中,所述人力驱动车包括:曲柄轴;第一旋转体,其与所述曲柄轴连接;车轮;第二旋转体,其与所述车轮连接;传递体,其构成为与所述第一旋转体及所述第二旋转体卡合,并在所述第一旋转体与所述第二旋转体之间传递驱动力;拨链器,其构成为操作所述传递体,以变更所述车轮的转速相对于所述曲柄轴的转速的变速比;马达,其构成为驱动所述传递体;以及电动致动器,其构成为操作所述拨链器,所述控制装置包括控制部,该控制部构成为控制所述电动致动器及所述马达,所述控制部构成为,在所述拨链器动作以变更所述变速比的情况下并且在满足与踩踏相关的预定条件的情况下,控制所述马达,以通过所述马达驱动所述传递体,在所述人力驱动车减速的情况下,控制所述电动致动器,以使所述拨链器的变速档接近所述预定变速档、或者所述变速比接近预定变速比,在所述预定变速档与所述拨链器的当前变速档的差、或者所述预定变速比与所述当前变速比的差为预定值以下的情况下,控制所述电动致动器,以一级级地变更所述拨链器的所述变速档,若所述预定变速档与所述拨链器的当前变速档的差、或者所述预定变速比与所述当前变速比的差超过所述预定值,则控制所述电动致动器,以使所述拨链器跨及多个变速档而连续动作。
94.根据第四十二方面的控制装置,由于构成为,在拨链器动作以变更变速比的情况下并且在满足与踩踏相关的预定的条件的情况下,控制马达,以通过马达驱动传递体,因此能够适当地变更变速比。根据第四十二方面的控制装置,在人力驱动车减速的情况下,若预定变速档与拨链器的当前变速档的差、或者预定变速比与当前变速比的差超过预定值,则能够控制电动致动器,以使拨链器跨及多个变速档而连续动作。根据第四十二方面的控制装置,能够缩短使当前变速档变成优选变速档所需的时间、或者缩短使当前变速比变成优选变速比所需的时间。
95.在根据本发明的第十八~第四十二方面中的任一方面的第四十三方面的控制装置中,所述控制部构成为,在所述拨链器动作以变更所述变速比的情况下并且在满足与所述踩踏相关的预定条件的情况下,控制所述马达,以通过所述马达驱动所述传递体,控制所述电动致动器,以使在所述人力驱动车的车速为预定的第五速度以下时,使所述拨链器跨及多个变速档而动作所需的第五时间,小于所述人力驱动车的车速超过所述预定的第五速度时使所述拨链器跨及所述多个变速档动作所需的第六时间。
96.根据第四十三方面的控制装置,能够控制电动致动器,以在使拨链器跨及多个变速档而动作的情况下,在人力驱动车的车速为预定的第五速度以下时在比人力驱动车的车速超过预定的第五速度时更短的时间内,完成拨链器的动作。根据第四十三方面的控制装置,易于在人力驱动车停止之前完成变速。
97.根据本发明的第四十四方面的控制装置为人力驱动车用的控制装置,其中,所述人力驱动车包括:曲柄轴;第一旋转体,其与所述曲柄轴连接;车轮;第二旋转体,其与所述车轮连接;传递体,其构成为与所述第一旋转体及所述第二旋转体卡合,并在所述第一旋转体与所述第二旋转体之间传递驱动力;拨链器,其构成为操作所述传递体,以变更所述车轮的转速相对于所述曲柄轴的转速的变速比;马达,其构成为驱动所述传递体;以及电动致动器,其构成为操作所述拨链器,所述控制装置包括控制部,该控制部构成为控制所述电动致
动器及所述马达,所述控制部构成为,在所述拨链器动作以变更所述变速比的情况下并且在满足与踩踏相关的预定条件的情况下,控制所述马达,以通过所述马达驱动所述传递体,控制所述电动致动器,以使在所述人力驱动车的车速为预定的第五速度以下时使所述拨链器跨及多个变速档而动作所需的第五时间,小于所述人力驱动车的车速超过所述预定的第五速度时使所述拨链器跨及所述多个变速档而动作所需的第六时间。
98.根据第四十四方面的控制装置,由于构成为,在拨链器动作以变更变速比的情况下并且满足与踩踏相关的预定条件的情况下,控制马达,以通过马达驱动传递体,因此能够适当地变更变速比。根据第四十四方面的控制装置,在使拨链器跨及多个变速档动作的情况下,能够控制电动致动器,以使得人力驱动车的车速为预定的第五速度以下时在比人力驱动车的车速超过预定的第五速度时更短的时间内完成拨链器的动作。根据第四十四方面的控制装置,易于在人力驱动车停止之前完成变速。
99.在根据本发明的第一~第四十四方面中的任一方面的第四十五方面的控制装置中,在输入所述曲柄轴的人力驱动力为预定驱动力以下的情况、所述曲柄轴的转速为第二转速以下的情况、以及所述曲柄轴正在摆动的情况中的至少一种情况下,满足与所述踩踏相关的预定条件。
100.根据第四十五方面的控制装置,输入曲柄轴的人力驱动力为预定驱动力以下的情况、曲柄轴的转速为第二转速以下的情况、曲柄轴正在摆动的情况中的至少一种情况下,能够通过驱动马达来适当地变更变速比。
101.在根据本发明的第一~第四十五方面中的任一方面的第四十六方面的控制装置中,所述马达构成为,根据人力驱动力对所述人力驱动车施加推进力,所述控制部构成为,在所述拨链器动作以变更所述变速比的情况下并且在满足与所述踩踏相关的预定条件的情况下,控制马达,以驱动所述传递体而不对所述人力驱动车施加推进力。
102.根据第四十六方面的控制装置,在拨链器动作以变更变速比的情况下在并且满足与踩踏相关的预定条件的情况下,能够控制马达驱动传递体而不对人力驱动车施加推进力。根据第四十六方面的控制装置,能够抑制马达的电力消耗。
103.根据本发明的第四十七方面的控制装置为人力驱动车用的控制装置,其中,所述人力驱动车包括:曲柄轴;第一旋转体,其与所述曲柄轴连接;车轮;第二旋转体,其与所述车轮连接;传递体,其构成为与所述第一旋转体及所述第二旋转体卡合,并在所述第一旋转体与所述第二旋转体之间传递驱动力;拨链器,其构成为操作所述传递体,以变更所述车轮的转速相对于所述曲柄轴的转速的变速比,并且具有多个变速位置;电动致动器,其构成为使所述拨链器动作;以及马达,其构成为驱动所述传递体,所述控制装置包括控制部,该控制部构成为控制所述电动致动器及所述马达,并接收用于调整所述拨链器的位置的信号,所述控制部构成为,在收到所述信号的情况下,控制所述马达以驱动所述马达,在与所述马达的转速和所述车轮的转速对应的第一变速比,与所述拨链器的当前位置不对应的情况下,控制所述电动致动器,以使所述拨链器的位置与所述第一变速比对应。根据第四十七方面的控制装置,在接收到用于调整拨链器的位置的信号的情况下,驱动马达,在与所述马达的转速及所述车轮的转速对应的第一变速比与所述拨链器的当前位置不对应的情况下,通过电动致动器驱动拨链器并使其与第一变速比对应,因此能够适当地变更变速比。
104.根据本发明的第四十八方面的动力传递系统为人力驱动车用的动力传递系统,且
包括:权利要求1~47中任一项所述的人力驱动车用的控制装置;和第一单向离合器,其构成为,设置于所述曲柄轴与所述第一旋转体之间的第一动力传递路径上,从曲柄轴向第一旋转体传递第一旋转方向的旋转力,并抑制从所述第一旋转体向所述曲柄轴传递所述第一旋转方向的旋转力。
105.根据第四十八方面的动力传递系统,能够适当地变更变速比。根据第四十八方面的动力传递系统,在通过马达使第一旋转体旋转的情况下,能够通过第一单向离合器抑制第一旋转体的旋转力向曲柄轴传递,因此,在驱动马达来变更变速比的情况下,能够适当地变更变速比。
106.在根据本发明的第四十八方面的第四十九方面的动力传递系统中,还包括蓄电装置,该蓄电装置构成为蓄积由所述马达发电产生的电力,所述控制部构成为使用所述蓄电装置的电力来控制所述马达。
107.根据第四十九方面的动力传递系统,能够使用用于蓄积由马达发电而产生的电力的蓄电装置的电力来控制马达。根据第四十九方面的动力传递系统,能够降低蓄电装置的充电频率。
108.根据本发明的第五十方面的动力传递系统为人力驱动车用的动力传递系统,其中,所述人力驱动车包括:曲柄轴;第一旋转体,其与所述曲柄轴连接;车轮;第二旋转体,其与所述车轮连接;传递体,其构成为与所述第一旋转体及所述第二旋转体卡合,并在所述第一旋转体与所述第二旋转体之间传递驱动力;以及拨链器,其构成为操作所述传递体,以变更所述车轮的转速相对于所述曲柄轴的转速的变速比;所述动力传递系统包括:马达,其构成为驱动所述传递体,并构成为通过驱动所述传递体而发电;蓄电装置,其构成为蓄积由所述马达发电产生的电力;以及所述人力驱动车用的控制装置;所述控制装置包括控制部,该控制部构成为使用所述蓄电装置的电力来控制所述马达,所述控制部构成为,在所述拨链器动作以变更所述变速比的情况下并且在满足与踩踏相关的预定条件的情况下,控制所述马达,以驱动所述传递体。
109.根据第五十方面的动力传递系统,由于构成为,在拨链器动作以变更变速比的情况下并且在满足与踩踏相关的预定条件的情况下,控制马达,以通过马达来驱动传递体,因此能够适当地变更变速比。根据第五十方面的动力传递系统,能够使用用于蓄积由马达发电而产生的电力的蓄电装置的电力来控制马达。根据第五十方面的动力传递系统,能够降低蓄电装置的充电频率。
110.在根据本发明的第五十方面的第五十一方面的动力传递系统中,所述人力驱动车包括电动致动器,该电动致动器构成为使所述拨链器动作,所述控制部构成为使用所述蓄电装置的电力来控制所述电动致动器。
111.根据第五十一方面的动力传递系统,能够使用用于蓄积由马达发电而产生的电力的蓄电装置的电力来控制电动致动器。
112.在根据本发明的第五十或第五十一方面的第五十二方面的动力传递系统中,还包括第一单向离合器,其构成为,设置在所述曲柄轴与所述第一旋转体之间的第一动力传递路径上,从曲柄轴向第一旋转体传递第一旋转方向的旋转力,并抑制从所述第一旋转体向所述曲柄轴传递所述第一旋转方向的旋转力。
113.根据第五十二方面的动力传递系统,由于在第一旋转体通过马达而旋转的情况
下,能够通过第一单向离合器抑制第一旋转体的旋转力向曲柄轴的传递,因此在驱动马达变更变速比的情况下,能够适当地变更变速比。
114.在根据本发明的第四十八~第五十二方面中的任一方面的第五十三方面的动力传递系统中,还包括第二单向离合器,其构成为,设置在所述第二旋转体与所述车轮之间的第二动力传递路径上,从所述第二旋转体向所述车轮传递与所述第一旋转方向对应的所述第二旋转方向的旋转力,并抑制从所述车轮向所述第二旋转体传递所述第二旋转方向的旋转力。
115.根据第五十三方面的动力传递系统,由于能够通过第二单向离合器允许第二旋转体与车轮的相对旋转,因此,在驱动马达变更变速比的情况下,能够适当地变更变速比。
116.发明的效果
117.本发明的人力驱动车用的控制装置及动力传递系统能够适当地变更变速比。
附图说明
118.图1是包括第一实施方式的人力驱动车用的控制装置的人力驱动车的侧视图;
119.图2是图1的人力驱动车所包括的驱动单元的剖视图;
120.图3是图1的人力驱动车的动力传递系统的动力传递路径的示意图;
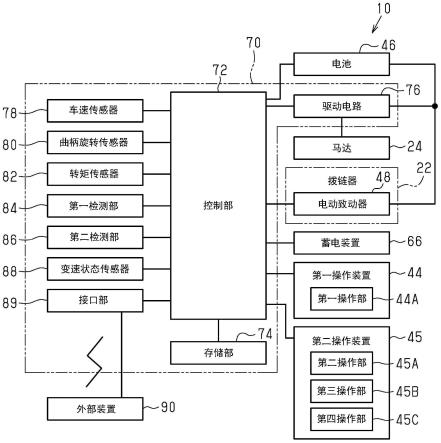
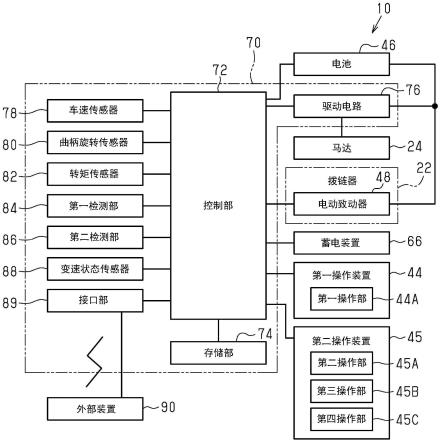
121.图4是表示包括第一实施方式的人力驱动车用的控制装置的人力驱动车的电气结构的框图;
122.图5是由图4的控制部执行的、控制电动致动器及马达以变更变速比的处理的流程图;
123.图6是由图4的控制部执行的、控制电动致动器及马达以调整拨链器的位置的处理的流程图,;
124.图7是由第二实施方式的控制部执行的、切换第一模式与第二模式的处理的流程图;
125.图8是由第二实施方式的控制部执行的、控制电动致动器及马达以变更变速比的处理的流程图;
126.图9是表示第三实施方式的人力驱动车用的控制装置的电气结构的框图;
127.图10是由图9的控制部执行的、控制电动致动器及马达以变更变速比的处理的流程图;
128.图11是表示包括第三实施方式的人力驱动车用的控制装置的人力驱动车的电气结构的框图;
129.图12是由图11的控制部执行的、在第一变速模式下切换第三模式与第四模式的处理的流程图;
130.图13是由第一变形例的控制部执行的、控制电动致动器及马达以变更变速比的处理的流程图;
131.图14是由第二变形例的控制部执行的、控制电动致动器及马达以变更变速比的处理的流程图;
132.图15是由第三变形例的控制部执行的、控制电动致动器及马达以变更变速比的处理的流程图;
133.图16是由第四变形例的控制部执行的、控制电动致动器及马达以变更变速比的处理的流程图;
134.图17是由第五变形例的控制部执行的、控制电动致动器及马达以变更变速比的处理的流程图;
135.图18是由第六变形例的控制部执行的、控制电动致动器及马达以变更变速比的处理的流程图;
136.图19是由第七变形例的控制部执行的、控制电动致动器及马达以变更变速比的处理的流程图;
137.图20是由第八变形例的控制部执行的、控制电动致动器及马达以变更变速比的处理的流程图;
138.图21是由第九变形例的控制部执行的、控制电动致动器及马达以变更变速比的处理的流程图;
139.图22是由第十变形例的控制部执行的、控制电动致动器及马达以变更变速比的处理的流程图;
140.图23是由第十一变形例的控制部执行的、控制电动致动器及马达以变更变速比的处理的流程图;
141.图24是由第十二变形例的控制部执行的、控制电动致动器及马达以变更变速比的处理的流程图;
142.图25是由第十三变形例的控制部执行的、控制电动致动器及马达以变更变速比的处理的流程图;
143.图26是由第十四变形例的控制部执行的、控制电动致动器及马达以变更变速比的处理的流程图;
144.图27是由第十五变形例的控制部执行的、控制电动致动器及马达以变更变速比的处理的流程图;
145.图28是由第十六变形例的控制部执行的、控制电动致动器及马达以变更变速比的处理的流程图。
具体实施方式
146.<第一实施方式>
147.参照图1~图6,对第一实施方式的人力驱动车用的动力传递系统60及人力驱动车用的控制装置70进行说明。人力驱动车10是一种至少具有一个车轮,且至少能够由人力驱动力h驱动的交通工具。人力驱动车10包括例如,山地自行车、公路自行车、城市自行车、货运自行车、以及手动自行车、斜躺式自行车等各种自行车。人力驱动车10所具有的车轮数量并无限定。人力驱动车10也包括例如独轮车及具有三个以上车轮的交通工具。人力驱动车10并不限定于仅能够由人力驱动力h驱动的交通工具。人力驱动车10包括不仅利用人力驱动力h,还利用马达的驱动力来进行推进的电动自行车(e-bike)。电动自行车包括通过马达来辅助推进的电动辅助自行车。以下,在实施方式中,将人力驱动车10作为电动辅助自行车来说明。
148.人力驱动车10包括曲柄轴12、第一旋转体14、车轮16、第二旋转体18、传递体20、拨
链器22、以及马达24。人力驱动车10还包括一对曲柄臂26。曲柄轴12与曲柄臂26构成曲柄28。人力驱动力h输入至曲柄28。人力驱动车10还包括车体30。车轮16包括后轮16a和前轮16b。车体30包括车架32。曲柄28能够相对于车架32旋转。一对曲柄臂26包括第一曲柄臂26a和第二曲柄臂26b。第一曲柄臂26a设置于曲柄轴12的轴向的一端部。第二曲柄臂26b设置于曲柄轴12的轴向的另一端部。人力驱动车10还包括踏板34。踏板34包括第一踏板34a和第二踏板34b。第一踏板34a连结于第一曲柄臂26a。第二踏板34b连结于第二曲柄臂26b。后轮16a通过曲柄28旋转而被驱动。后轮16a支撑于车架32。曲柄28与后轮16a通过驱动机构36连结。
149.驱动机构36包括第一旋转体14、第二旋转体18、以及传递体20。第一旋转体14连接于曲柄轴12。第二旋转体18连接于车轮16。传递体20构成为与第一旋转体14及第二旋转体18卡合,并在第一旋转体14与第二旋转体18之间传递驱动力。传递体20将第一旋转体14的旋转力传递至第二旋转体18。在本实施方式中,第一旋转体14与曲柄轴12同轴配置,但第一旋转体14与曲柄轴12也可以不同轴配置。在第一旋转体14与曲柄轴12不同轴配置的情况下,第一旋转体14与曲柄轴12经由第一传递机构连接,该第一传递机构包括齿轮、滑轮、链条、传动轴、以及皮带中的至少一者。在本实施方式中,第二旋转体18与后轮16a同轴配置,但第二旋转体18与后轮16a也可以不同轴配置。在第二旋转体18与后轮16a不同轴配置的情况下,第二旋转体18与后轮16a经由第二传递机构连接,该第二传递机构包括齿轮、滑轮、链条、传动轴、以及皮带中的至少一者。
150.在车架32经由前叉38而安装有前轮16b。在前叉38经由把立40连结有车把42。本实施方式中,后轮16a通过驱动机构36连结于曲柄28,但也可以是后轮16a与前轮16b中的至少一者通过驱动机构36连结于曲柄28。
151.拨链器22构成为,操作传递体20以变更车轮16的转速nw相对于曲柄轴12的转速nc的变速比r。变速比r、转速nw、转速nc的关系可以用式(1)表示。
152.式(1):变速比r=转速nw/转速nc
153.拨链器22包括例如前拨链器及后拨链器中的至少一者。在拨链器22包括后拨链器的情况下,第一旋转体14包括至少一个链轮,第二旋转体18包括多个链轮,且传递体20包括链条。在拨链器22包括后拨链器的情况下,拨链器22使与第二旋转体18所包括的多个链轮中的一个链轮卡合的链条,移动至多个链轮中的另一个链轮。在拨链器22包括前拨链器的情况下,第一旋转体14包括多个链轮,第二旋转体18包括至少一个链轮,且传递体20包括链条。在拨链器22包括前拨链器的情况下,拨链器22使与第一旋转体14所包括的多个链轮中的一个链轮卡合的链条,移动至多个链轮中的另一个链轮。拨链器22通过操作传递体20,变更第一旋转体14及第二旋转体18中的至少一者与传递体20的卡合状态,从而变更变速比r。
154.第一旋转体14及第二旋转体18也可以设置于齿轮箱。齿轮箱例如设置在曲柄轴12附近。在第一旋转体14及第二旋转体18设置于齿轮箱的情况下,第一旋转体14及第二旋转体18中的至少一者包括多个链轮,拨链器22构成为设置于齿轮箱,变更第一旋转体14及第二旋转体18中的至少一者与传递体20的卡合状态。
155.优选地,人力驱动车10还包括第一操作装置44。第一操作装置44例如设置于车把42。第一操作装置44构成为由使用者的手及手指等操作。第一操作装置44包括第一操作部44a。第一操作装置44用于在使用者有意禁止变速的情况下操作。优选地,人力驱动车10还包括第二操作装置45,该第二操作装置45构成为操作拨链器22。第二操作装置45例如设置
于车把42。第二操作装置45构成为由使用者的手及手指等操作。第二操作装置45至少包括第二操作部45a及第三操作部45b。
156.第一操作装置44的一部分与第二操作装置45的一部分可以作为单独部件一体地形成。例如,第一操作装置44的第一操作部44a、与第二操作装置45的第二操作部45a及第三操作部45b可以设置于共同的基座部件。第一操作部44a例如包括按钮开关或杆式开关。第一操作部44a只要为通过使用者操作而至少在两个状态之间转换的结构即可,可为任意结构,并不限定于按钮开关或杆式开关。第二操作部45a及第三操作部45b例如包括按钮开关或杆式开关。第二操作部45a及第三操作部45b只要为通过使用者操作而至少在两个状态之间转换的结构即可,可为任意结构,并不限定于按钮开关或杆式开关。
157.第二操作部45a及第三操作部45b构成为操作拨链器22。第二操作装置45根据使用者的操作,将变速操作信号输出至控制装置70的控制部72。第二操作装置45还可以在第二操作部45a及第三操作部45b的基础上包括第四操作部45c,或者包括第四操作部45c来代替第二操作部45a及第三操作部45b,该第四操作部45c构成为操作拨链器22以外的人力驱动车用的组件。人力驱动车用的组件例如包括码表、悬架、可调节座杆、车灯或者驱动单元中的至少一者。变速操作信号例如包括:第一操作信号,其包括操作拨链器22以增大变速比r的指令;和第二操作信号,其包括操作拨链器22以减小变速比r的指令。
158.第二操作装置45在第二操作部45a被操作时,输出第一操作信号,在第三操作部45b被操作时,输出第二操作信号。在本实施方式中,通过第二操作部45a及第三操作部45b操作后拨链器,但也可以通过第二操作部45a及第三操作部45b操作前拨链器,还可以通过第二操作部45a及第三操作部45b操作后拨链器与前拨链器这两者。第二操作装置45可以在第二操作部45a及第三操作部45b的基础上,还包括第五操作部及第六操作部。第五操作部及第六操作部构成为,例如,与第二操作部45a及第三操作部45b相同。也可以通过第二操作部45a及第三操作部45b、与第五操作部及第六操作部中的一者来操作后拨链器,通过第二操作部45a及第三操作部45b、与第五操作部及第六操作部中的另一者来操作前拨链器。
159.优选地,人力驱动车10还包括电动致动器48,该电动致动器48构成为操作拨链器22。电动致动器48包括例如电动马达。电动致动器48还可以包括例如与电动马达的输出轴连结的减速器。电动致动器48可以设置于拨链器22,也可以设置于人力驱动车10中远离拨链器22的位置。通过电动致动器48驱动,从而拨链器22操作传递体20,来进行变速动作。拨链器22包括例如基座部件、移动部件、以及连杆部件,该连杆部件将移动部件可移动地连结于基座部件。移动部件包括引导连结部件的引导部件。引导部件包括例如引导板和滑轮。电动致动器48例如可以直接驱动连杆部件。电动致动器48也可以经由缆线来驱动连杆部件。
160.优选地,人力驱动车10还包括电池46。电池46包括一个或多个电池元件。电池元件包括可充电电池。电池46构成为向控制装置70供给电力。优选地,电池46构成为也向电动致动器48供给电力。电池46优选通过有线或无线的方式与控制装置70的控制部72可通信地连接。电池46例如能够通过电力线通信(plc;power line communication)、can(controller area network)或者uart(universal asynchronous receiver/transmitter)等方式与控制部72通信。
161.马达24构成为驱动传递体20。优选地,马达24构成为根据人力驱动力h向人力驱动车10施加推进力。马达24包括一个或多个电动马达。马达24所包括的电动马达例如为无刷
马达。马达24构成为,将旋转力传递至从踏板34至第二旋转体18的人力驱动力h的动力传递路径。在本实施方式中,马达24构成为,设置于人力驱动车10的车架32,将旋转力传递至第一旋转体14。人力驱动车10还包括用于设置马达24的壳体52。驱动单元50构成为包括马达24及壳体52。壳体52安装于车架32。壳体52将曲柄轴12可旋转地支撑。马达24例如也可以构成为,将旋转力传递至传递体20,而不经由第一旋转体14。在该情况下,例如,将与传递体20卡合的链轮设置于马达24的输出轴或者传递输出轴的力的传递部件。
162.也可以在马达24与人力驱动力h的动力传递路径之间设置减速器54。减速器54构成为例如包括多个齿轮。在马达24与人力驱动力h的动力传递路径之间,可以优选设置有第三单向离合器56,该第三单向离合器56在使曲柄轴12向人力驱动车10前进的方向旋转的情况下,抑制曲柄28的旋转力传递至马达24。第三单向离合器56例如包括滚子式离合器、花键式离合器及爪式离合器中的至少一者。
163.驱动单元50包括输出部58。输出部58例如连结于曲柄轴12,并且连结于减速器54。人力驱动力h与马达24的输出被输入至输出部58。第一旋转体14连结于输出部58,以与输出部58一体旋转。
164.优选地,动力传递系统60包括控制装置70和第一单向离合器62。第一单向离合器62构成为,设置于曲柄轴12与第一旋转体14之间的第一动力传递路径,从曲柄轴12向第一旋转体14传递第一旋转方向的旋转力,并抑制从第一旋转体14向曲柄轴12传递第一旋转方向的旋转力。第一单向离合器62构成为,在曲柄28向前旋转的情况下使第一旋转体14向前旋转,在曲柄28向后旋转的情况下允许曲柄28与第一旋转体14的相对旋转。第一单向离合器62例如设置于驱动单元50的壳体52。第一单向离合器62例如设置于曲柄轴12与输出部58之间。第一单向离合器62包括例如滚子式离合器、花键式离合器以及爪式离合器中的至少一者。
165.曲柄轴12与第一旋转体14也可以一体旋转地连结。在曲柄轴12与第一旋转体14一体旋转地连结的情况下,省略第一单向离合器62。
166.优选地,动力传递系统60还包括第二单向离合器64。第二单向离合器64设置构成为,设置于第二旋转体18与车轮16之间的第二动力传递路径,从第二旋转体18向车轮16传递在与第一旋转方向对应的第二旋转方向的旋转力,,并抑制从车轮16向第二旋转体18传递第二旋转方向的旋转力。第二单向离合器64构成为,在第二旋转体18向前旋转的情况下使后轮16a向前旋转,在第二旋转体18向后旋转的情况下允许第二旋转体18与后轮16a的相对旋转。第二单向离合器64设置于例如后轮16a的花鼓轴。第二单向离合器64包括例如滚子式离合器、花键式离合器以及爪式离合器中的至少一者。
167.第二旋转体18与后轮16a也可以一体旋转地连结。在第二旋转体18与后轮16a一体旋转地连结的情况下,省略第二单向离合器64。
168.优选地,动力传递系统60还包括蓄电装置66。蓄电装置66构成为蓄积由马达24发电产生的电力。优选地,控制部72构成为使用蓄电装置66的电力控制马达24。蓄电装置66可以包括电池46,可以包括电池46以外的其他电池,还可以包括电容器。蓄电装置66设置于例如驱动单元50的壳体52。
169.控制装置70包括控制部72。控制部72包括执行预定的控制程序的演算处理装置。演算处理装置包括例如cpu(central processing unit)或mpu(micro processing unit)。
演算处理装置可以设置于彼此分开的多个位置。控制部72也可以包括一个或多个微型计算机。优选地,控制装置70还包括存储部74。存储部74存储有各种控制程序及用于各种控制处理的信息。存储部74包括例如非易失性存储器及易失性存储器。非易失性存储器包括例如rom(read-only memory)、eprom(erasable programmable read only memory)、eeprom(electrically erasable programmable read-only memory)、以及闪速存储器中的至少一者。易失性存储器包括例如ram(random access memory)。
170.控制装置70优选还包括马达24的驱动电路76。驱动电路76与控制部72优选设置于驱动单元50的壳体52。驱动电路76与控制部72也可以设置于例如同一电路板。驱动电路76包括逆变电路。驱动电路76控制从电池46供给至马达24的电力。驱动电路76通过有线或无线的方式与控制部72可通信地连接。驱动电路76根据来自控制部72的控制信号驱动马达24。
171.优选地,控制装置70还包括车速传感器78、曲柄旋转传感器80、以及转矩传感器82。
172.车速传感器78构成为检测与人力驱动车10的车轮16的转速nw相应的信息。优选地,车速传感器78构成为检测人力驱动车10的车轮16上设置的磁铁。车速传感器78构成为,例如,在车轮16旋转一圈期间,输出预定次数的检测信号。预定次数例如为1。车速传感器78输出与车轮16的转速nw相应的信号。控制部72能够基于车轮16的转速nw算出人力驱动车10的车速v。车速v能够基于车轮16的转速nw、和与车轮16的周长相关的信息而算出。与车轮16的周长相关的信息存储于存储部74。
173.车速传感器78包括例如构成簧式开关的磁簧或霍尔元件。车速传感器78可以为安装于人力驱动车10的车架32的后下叉并检测安装于后轮16a的磁铁的结构,也可以为设置于前叉38并检测安装于前轮16b的磁铁的结构。在本实施方式中,车速传感器78构成为,在车轮16旋转一圈的情况下,簧式开关检测一次磁铁。车速传感器78只要能够检测与人力驱动车10的车轮16的转速nw相应的信息即可,可以是任意结构,例如也可以包括光学传感器或加速度传感器等。车速传感器78经由无线通信装置或电缆线连接于控制部72。
174.曲柄旋转传感器80构成为检测与人力驱动车10的曲柄轴12的转速nc相应的信息。曲柄旋转传感器80设置于例如人力驱动车10的车架32或驱动单元50。曲柄旋转传感器80构成为包括磁传感器,该磁传感器输出与磁场强度相应的信号。磁场强度在周向上变化的环状磁铁设置于曲柄轴12、与曲柄轴12连动地旋转的部件、或者从曲柄轴12至第一旋转体14之间的动力传递路径。与曲柄轴12连动地旋转的部件可以是马达24的输出轴。曲柄旋转传感器80输出与曲柄轴12的转速nc相应的信号。
175.磁铁在从曲柄轴12至第一旋转体14之间的人力驱动力h的动力传递路径上,可以设置于与曲柄轴12一体旋转的部件。例如,在曲柄轴12与第一旋转体14之间未设置第一单向离合器时,磁铁可以设置于第一旋转体14。曲柄旋转传感器80只要能够检测与人力驱动车10的曲柄轴12的转速nc相应的信息即可,可以是任意结构,也可以代替磁传感器,而包括例如光学传感器、加速度传感器或转矩传感器等。曲柄旋转传感器80经由无线通信装置或电缆线连接于控制部72。
176.转矩传感器82构成为输出与由人力驱动力h施加至曲柄28的转矩相应的信号。转矩传感器82构成为输出与输入至曲柄28的人力驱动力h的转矩相应的信息。例如,在动力传
递路径上设置有第一单向离合器62时,转矩传感器82优选设于比第一单向离合器62更靠动力传递路径的上游侧。转矩传感器82包括应变式传感器、磁致伸缩传感器或压力传感器等。应变式传感器包括应变计。转矩传感器82设置于动力传递路径、或者动力传递路径所包括的部件附近所包括的部件。动力传递路径所包括的部件例如为曲柄轴12、在曲柄轴12与第一旋转体14之间传递人力驱动力h的部件、曲柄臂26、或者踏板34。转矩传感器82经由无线通信装置或电缆线连接于控制部72。
177.优选地,控制装置70包括第一检测部84,该第一检测部84构成为检测马达24的负载l。第一检测部84包括检测马达24内流通的电流的电流传感器、和检测马达24的转速的旋转传感器。关于马达24的负载l,由于能够基于马达24内流通的电流及马达24的转速,利用公知技术而检测,因此省略详细说明。
178.优选地,控制装置70还包括第二检测部86,该第二检测部86检测人力驱动车10的倾斜角度d。倾斜角度d包括人力驱动车10的俯仰角度。第二检测部86例如包括例如倾斜传感器及gps(global positioning system)接收器中的至少一者。倾斜传感器包括例如陀螺传感器及加速度传感器中的至少一者。在第二检测部86包括gps接收器的情况下,将包括与道路坡度相关的信息的地图信息预先存储于存储部74,并由控制部72获取人力驱动车10的当前位置的道路坡度作为俯仰角度。
179.优选地,控制装置70还包括变速状态传感器88。变速状态传感器88输出与拨链器22的变速状态相关的信息。变速状态例如包括变速档。变速状态传感器88可以设置于拨链器22,也可以设置于第二操作装置45。变速状态传感器88例如构成为检测电动致动器48的动作。电动致动器48例如包括电动马达及减速器。变速状态传感器88构成为检测电动致动器48的电动马达或减速器的动作。变速状态传感器88例如构成为包括磁传感器、电位计、旋转编码器、线性编码器或光学传感器等。
180.存储部74将从变速状态传感器88输出的与变速状态相关的信息、和与人力驱动车10的变速比r相关的信息相对应地存储。与变速状态相关的信息和与人力驱动车10的变速比r相关的信息之间的对应可以存储为表格,也可以存储为函数。控制部72能够根据从变速状态传感器88输出的与变速状态相关的信息、和存储于存储部74的信息,来获取与当前人力驱动车10的变速比r相关的信息。与人力驱动车10的变速比r相关的信息可以用变速比r本身来表示,也可以不用变速比r本身,而是用与变速比r对应的参数来表示。与变速比r对应的参数可以为表示变速档的参数。
181.控制部72构成为控制马达24。控制部72构成为,例如,根据人力驱动车10的车速v、曲柄28的转速n、以及人力驱动力h中的至少一者,来控制马达24。人力驱动力h可以由转矩ht表示,也可以由功率hw表示。在人力驱动力h由功率hw表示的情况下,人力驱动力h可以通过将由转矩传感器82检测到的转矩与由曲柄旋转传感器80检测到的曲柄轴12的转速nc相乘而得。
182.控制部72构成为,例如,控制马达24以使马达24的辅助力m相对于人力驱动力h的比成为预定的辅助比率a。预定的辅助比率a不固定,例如可以根据人力驱动力h变化,可以根据车速v变化,还可以根据人力驱动力h及车速v这两者变化。人力驱动力h及辅助力m可以由转矩表示,也可以由功率表示。在人力驱动力h及辅助力m由转矩表示的情况下,将人力驱动力h记载为人力转矩th,将辅助力m记载为辅助转矩tm。在人力驱动力h及辅助力m由功率
表示的情况下,将人力驱动力h记载为人力功率wh,将辅助力m记载为辅助功率wm。存在将人力驱动车10的输出转矩mt相对于人力转矩th的转矩比率记载为辅助比率at的情况。存在将马达24的辅助功率wm相对于人力功率wh的比率记载为辅助比率aw的情况。辅助比率a与由马达24的辅助力对人力驱动车10产生的推进力相对于由人力驱动力h对人力驱动车产生的推进力的比率相等。
183.控制部72构成为,例如,可以通过选自人力驱动力h与比率a的对应关系的至少一部分互不相同的多种控制状态中的一种控制状态控制马达24。人力功率wh是通过将人力转矩th与曲柄轴12的转速nc相乘而算出的。在马达24的输出经由减速器54而输入至人力驱动力h的动力路径的情况下,将减速器54的输出设为辅助力m。在不具有减速器54的情况下,辅助功率wm是通过将马达24的输出转矩与马达24的转速相乘而算出的。在具有减速器54的情况下,辅助功率wm是通过将减速器54的输出转矩与减速器54的输出转速相乘而算出的。在具有减速器54的情况下,存储部74构成为存储与减速器54的减速比相关的信息。
184.控制部72能够根据马达24的转速和与减速器54的减速比相关的信息,来算出减速器54的输出转速。存储部74存储有例如表示马达24的控制指令与马达24的输出转矩的关系的信息。控制部72例如能够根据存储于存储部74的表示马达24的控制指令与马达24的输出转矩的关系的信息,来算出马达24的输出转矩。控制部72例如能够根据马达24的输出转矩、和与减速器54的减速比相关的信息,来算出减速器的输出转矩。控制部72构成为,能够根据人力转矩th或人力功率wh,将控制指令输出至马达24的驱动电路76。控制指令包括例如转矩指令值。多种控制状态也可以包括不驱动马达24的控制状态。
185.控制部72构成为,控制马达24以使辅助力m为上限值mx以下。在辅助力m由转矩表示的情况下,控制部72构成为,控制马达24以使输出转矩mt为上限值mtx以下。优选地,上限值mtx是30nm以上且90nm以下的范围内的值。上限值mtx例如为80nm。上限值mtx例如由马达24的输出特性确定。在辅助力m由功率表示的情况下,控制部72构成为,控制马达24以使辅助功率wm为上限值wmx以下。
186.例如,若车速v为预定车速vx以上,则控制部72将马达24停止。预定车速vx例如为时速45km。预定车速vx可以小于时速45km,例如可以为时速25km。
187.例如,在曲柄轴12的转速nc小于预定转速ncx的情况下,控制部72停止与曲柄28的转速n及人力驱动力h中的至少一者相应的马达24的驱动。预定转速ncx例如为0rpm。例如,若曲柄轴12的转速nc为预定转速ncy以上,则控制部72也可以将马达24停止、或者控制马达24以减小辅助力m。预定转速ncy大于预定转速ncx,例如是120rpm~200rpm范围内的值。
188.优选地,控制部72构成为控制电动致动器48。优选地,控制部72构成为控制电动致动器48及马达24。控制部72向电动致动器48输出用于变更变速比r的变速控制信号。电动致动器48在输入有变速控制信号时动作以操作拨链器22。变速控制信号包括例如用于驱动电动致动器48的电力的信号。优选地,变速控制信号包括:第一变速控制信号,其包括电动致动器48操作拨链器22以增大变速比r的指令;和第二变速控制信号,其包括电动致动器48操作拨链器22以减小变速比r的指令。
189.控制部72优选构成为,在变速条件成立的情况下,控制电动致动器48,使拨链器22动作以变更变速比r。在用于增大变速比r的变速条件成立的情况下,控制部72将第一变速控制信号发送至电动致动器48,电动致动器48操作拨链器22以增大变速比r。在用于减小变
速比r的变速条件成立的情况下,控制部72将第二变速控制信号发送至电动致动器48,电动致动器48操作拨链器22以减小变速比r。
190.在本实施方式中,在变速执行条件成立,并且未禁止变速的情况下,变速条件成立。变速条件也可以仅在变速执行条件成立的情况下成立。例如在从第二操作装置45将变速操作信号输入至控制部72的情况、和与人力驱动车10的走行状态相关的预定条件成立的情况中的至少一种情况下,变速执行条件成立。控制部72可以根据使用者对第二操作装置45的手动操作来控制拨链器22,可以根据人力驱动车10的行驶状态来自动控制拨链器22,也可以根据使用者对第二操作装置45的手动操作与人力驱动车10的行驶状态这两者,来控制拨链器22。
191.控制部72可以构成为,切换根据使用者对第二操作装置45的手动操作来控制拨链器22的手动变速模式、和根据人力驱动车10的行驶状态来自动控制拨链器22的自动变速模式。例如,用于切换手动变速模式与自动变速模式的第三操作装置设于车把42,通过由使用者操作第三操作装置,从而控制部72可以切换手动变速模式与自动变速模式。例如,每操作一次第三操作装置,控制部72就依次切换手动变速模式和自动变速模式。例如,也可以通过同时操作第二操作装置45的第二操作部45a及第三操作部45b,从而控制部72切换手动变速模式与自动变速模式。
192.例如,控制部72可以构成为,在手动变速模式下,当第二操作装置45被操作时,能够根据以车轮16的转速nw及变速比r算出的第一转速n1、与预定转速或预定范围内的转速的差,而从手动变速模式自动地切换为自动变速模式。第一转速n1可以通过式(2)求出。
193.式(2):第一转速n1=转速nw/变速比r
194.例如,若切换为自动变速模式,则控制部72控制马达24及电动致动器48,以使变速比变为根据存储部74所存储的第一转速n1、与预定转速或预定范围内的转速的差而设定的变速比r。控制部72也可以构成为,不论在自动地切换为自动变速模式的情况、还是在通过使用者的操作而切换为自动变速模式的情况下,均能够在经过预定时间的情况、人力驱动力h达到预定值以上的情况、以及曲柄轴12的旋转量达到预定旋转量以上的情况中的至少一种情况下,从自动变速模式切换为手动变速模式。
195.例如,在曲柄轴12的转速nc为预定的第一范围以外的情况、人力驱动力h为预定的第二范围以外的情况、以及人力驱动车10减速的情况中的至少一种情况下,满足与人力驱动车10的行驶状态相关的预定条件。可以在曲柄轴12的转速nc为预定的第一范围以外的情况、人力驱动力h为预定的第二范围以外的情况、以及人力驱动车10减速的情况中的仅任一种情况下,满足与人力驱动车10的行驶状态相关的预定条件,也可以在任意两种情况下,满足与人力驱动车10的行驶状态相关的预定条件。控制部72构成为,控制电动致动器48,以使第一转速n1落入预定范围。
196.人力驱动车10减速的情况优选包括人力驱动车10在与行进方向对应的方向上的减速度大于预定减速度的情况。预定减速度优选与人力驱动车10由于突然制动而突然减速时的减速度对应。
197.变速执行条件也可以包括与人力驱动车10的行驶阻力相关的条件。行驶阻力例如包括空气阻力、滚动阻力、坡度阻力、以及加速阻力中的至少一者。例如,控制部72构成为,在行驶阻力变大的情况下,控制电动致动器48以减小变速比r,在行驶阻力变小的情况下,
控制电动致动器48以增大变速比r。
198.控制部72包括以下(a1)、(a2)、(a3)及(a4)中的至少一个结构。控制部72可以包括(a1)、(a2)、(a3)及(a4)结构中的两个结构,可以包括三个结构,也可以包括所有结构。
199.(a1)控制部72构成为,在人力驱动车10的车速v为第二速度v2以上、或者车轮16的转速nw为预定转速nwx以上的情况下,控制电动致动器48以使变速比r不增大。在(a1)的结构中,控制部72也可以构成为,在人力驱动车10的车速v为第二速度v2以上,并且车轮16的转速nw为预定转速nwx以上的情况下,控制电动致动器48以使变速比r不增大。
200.(a2)控制部72构成为,在拨链器22动作的情况下,控制电动致动器48,以在满足与变速相关的第一条件之前,不变更变速比r。
201.(a3)控制部72构成为,在控制电动致动器48及马达24以使变速比r在预定的第三时间t3内增减预定次数以上的情况下,控制电动致动器48,以在满足与变速相关的第二条件之前,使拨链器22不变更变速比r。
202.(a4)控制部72构成为,若人力驱动车10的车速v为第一速度v1以下、或者车轮16的转速nw为预定转速nwx以下,则即使与人力驱动车10的行驶状态相关的预定条件成立,也会控制电动致动器48以使拨链器22不变更变速比r。
203.在控制部72包括(a1)结构的情况下,控制部72在人力驱动车10的车速v为第二速度v2以上、和车轮16的转速nw达到预定转速nwx以上中的至少一种情况下,控制部72不会控制电动致动器48增大变速比r。例如,在人力驱动车10的车速v为第二速度v2以上、和车轮16的转速nw为预定转速nwx以上中的至少一种情况下,控制部72不向电动致动器48发送第一变速控制信号。例如,控制部72构成为,在人力驱动车10的车速v为第二速度v2以上、和车轮16的转速nw为预定转速nwx以上中的至少一种情况下,能够根据变速执行条件向电动致动器48发送第二变速控制信号。在车速v达到第二速度v2以上、和车轮16的转速nw达到预定转速nwx以上中的至少一种情况下,控制部72控制电动致动器48以使变速比r不增大,因此,能够抑制人力驱动车10的车速v的增加。
204.在控制部72包括(a2)结构的情况下,例如,控制部72构成为,在第二操作装置45被操作而拨链器22动作的情况下,控制电动致动器48,以在满足与变速相关的第一条件之前,不变更变速比r。优选地,在自第二操作装置45被操作后经过了预定的第一时间t1的情况、自电动致动器48停止后经过了预定的第二时间t2的情况、人力驱动车10的倾斜角度d达到预定的第一角度d1以上的情况、以及人力驱动车10的车速v达到预定的第三速度v3以上的情况中的至少一种情况下,满足与变速相关的第一条件。在拨链器22动作且不满足与变速相关的第一条件的情况下,控制部72不控制电动致动器48变更变速比r。例如,在拨链器22动作且不满足与变速相关的第一条件的情况下,控制部72不向电动致动器48输出第一变速控制信号及第二变速控制信号。预定的第一时间t1例如为0.1秒~10秒范围内的时间。预定的第二时间t2例如为0.1秒~10秒范围内的时间。预定的第一角度d1例如为人力驱动车10的俯仰角度中5度以上的角度。
205.在控制部72包括(a3)结构的情况下,例如,在自电动致动器48停止后经过了预定的第四时间t4的情况、人力驱动车10的倾斜角度d达到预定的第二角度d2以上的情况、以及人力驱动车10的车速达到预定的第四速度v4以上的情况中的至少一种情况下,满足与变速相关的第二条件。控制部72在控制电动致动器48及马达24以使变速比r在预定的第三时间
t3内增减预定次数以上且不满足与变速相关的第二条件的情况下,不控制电动致动器48变更变速比r。例如,控制部72在控制电动致动器48及马达24以使变速比r在预定的第三时间t3内增减预定次数以上且不满足与变速相关的第二条件的情况下,不向电动致动器48输出第一变速控制信号及第二变速控制信号。预定的第四时间t4例如为0.1秒~10秒范围内的时间。第四速度v4例如为时速3km以上的速度。预定的第二角度d2例如为人力驱动车10的俯仰角度中5度以上的角度。
206.在控制部72包括(a4)结构的情况下,第一速度v1及预定转速nx例如为适合于判断人力驱动车10停止行驶的值。第一速度v1例如为0km/h以上且3km/h以下的范围内的值。并且,预定转速nx例如是0rpm以上且5rpm以下的范围内的值。在第一速度v1及预定转速nx是适合于判断人力驱动车10停止行驶的值的情况下,控制部72能够抑制人力驱动车10停止时变更变速比r。由此,能够抑制在拨链器22的变速操作中途人力驱动车10停止。
207.控制部72构成为,在拨链器22动作以变更变速比r的情况下且满足与踩踏相关的预定条件的情况下,控制马达24,以通过马达24驱动传递体20。优选地,控制部72构成为,在拨链器22动作以变更变速比r的情况下且满足与踩踏相关的预定条件的情况下,控制马达24以不对人力驱动车10施加推进力的方式驱动传递体20。在拨链器22动作以变更变速比r的情况下且满足与踩踏相关的预定条件的情况下,控制部72控制马达24以不向后轮16a传递马达24的驱动力的方式驱动传递体20。例如,控制部72构成为,控制马达24,以通过马达24驱动传递体20,且后轮16a不因马达24而旋转。例如,控制部72构成为,控制马达24,以使第二旋转体18的转速变为后轮16a的转速以下。控制部72可以根据预先存储于存储部74的与马达24的转速或旋转转矩相关的信息,来控制马达24以不向人力驱动车10施加推进力。
208.优选地,控制部72构成为,在控制电动致动器48及马达24而变更变速比r的情况下且满足与踩踏相关的预定条件的情况下,控制电动致动器48及马达24,以使第一旋转体14及第二旋转体18中的至少一者与拨链器22的相对移动,与马达24的驱动同时开始或者在马达24驱动之前开始。控制部72可以构成为,在控制电动致动器48及马达24而变更变速比r的情况下且满足与踩踏相关的预定条件的情况下,控制电动致动器48及马达24,以使第一旋转体14及第二旋转体18中的至少一者与拨链器22的相对移动在马达24驱动后开始。
209.在变速条件下,控制部72可以构成为,控制电动致动器48以使拨链器22跨及多个变速档而动作。在该情况下,变速控制信号包括用于使拨链器22跨及多个变速档而动作的信号。控制部72可以构成为,控制马达24,以使拨链器22多次变更变速档而达到目标变速比r的情况下的马达24的转速大于拨链器22仅变更一次变速档而达到目标变速比r的情况下的马达24的转速。优选地,控制部72构成为,在拨链器22动作以变更变速比r的情况下且在满足与踩踏相关的预定条件的情况下,控制马达24,以通过马达24驱动传递体20。
210.控制部72构成为,在人力驱动车10减速的情况下,控制电动致动器48,以使拨链器22的变速档接近预定变速档、或者使变速比r接近预定变速比r。控制部72构成为,在预定变速档与拨链器22的当前变速档的差、或者预定变速比r与当前变速比r的差为预定值以下的情况下,控制电动致动器48,以一级级地变更拨链器22的变速档。控制部72构成为,若预定变速档与拨链器22的当前变速档的差、或者预定变速比r与当前变速比r的差超过预定值时,则控制电动致动器48,以使拨链器22跨及多个变速档而连续地动作。
211.与预定变速档相关的信息或与预定变速比r相关的信息例如作为人力驱动车10减
速情况下的目标变速比r而存储于存储部74。在根据与预定变速档相关的信息变速的情况下,预定值为,预定变速档与拨链器22的当前变速档的差优选为1级~3级的范围所对应的值。在根据与预定变速比r相关的信息变速的情况下,预定值为,预定变速比r与当前变速比r的差换算为变速档后优选为1级~3级的范围所对应的值。
212.优选地,控制部72构成为,控制电动致动器48,以使人力驱动车10的车速v为预定的第五速度v5以下时使拨链器22跨及多个变速档而动作所需的第五时间t5,小于人力驱动车10的车速v超过预定的第五速度v5时使拨链器22跨及多个变速档而动作所需的第六时间t6。当第二旋转体18包括适合变速的一个或多个变速促进区域的情况下,车速v越大,则从第二旋转体18的变速促进区域通过传递体20因拨链器22而移动的区域后到第二旋转体18的变速促进区域再次通过该区域所需的时间越短。
213.优选地,第五速度v5为时速10km以下的速度。优选地,第五时间t5设定为,当人力驱动车10的车速v为预定的第五速度v5以下时,足够根据变速控制信号而跨及多个变速档来变更变速比r所需的时间。优选地,第六时间t6设定为,当人力驱动车10的车速v超过预定的第五速度v5时,足够根据变速控制信号而跨及多个变速档来变更变速比r所需的时间。
214.控制部72可以构成为,在使拨链器22跨及多个变速档动作时,变更拨链器22的动作速度,也可以构成为控制电动致动器48,以使拨链器22每变更一级变速档就停止,并变更直至下一次动作开始的预定间隔。例如,在车速v为时速15公里以下的情况下,预定间隔是0.5秒以上且小于1秒的范围,在车速v大于时速15公里的情况下,预定间隔是0.25秒以上且小于0.5秒的范围。变速条件可以包括使拨链器22跨及多个变速档而变速的条件,也可以仅包括使拨链器22只变速一个变速档的条件。
215.优选地,在输入曲柄轴12的人力驱动力h为预定驱动力hx以下的情况、曲柄轴12的转速nc为第二转速nc2以下的情况、以及曲柄轴12正在摆动中的至少一种情况下,满足与踩踏相关的预定条件。优选地,与踩踏相关的预定条件为能够判定踩踏停止的条件。预定驱动力hx及第二转速nc2优选为适合于判定人力驱动车10的曲柄轴12的旋转停止的值。预定驱动力hx例如为0nm以上且3nm以下范围内的值。第二转速nc2例如为0rpm以上且5rpm以下范围内的值。曲柄轴12正在摆动的情况包括曲柄轴12并未完全停止且曲柄轴12的旋转角度cc维持在预定的角度范围内的情况。预定的角度范围例如为1度以上且20度以下。
216.例如,存在当骑行者将脚放在踏板34上而停止踩踏时,曲柄轴12摆动的情况。在曲柄轴12停止旋转或者正在摆动的情况下,由于第一旋转体14及第二旋转体18并未因人力驱动力h而旋转,因此,即使拨链器22动作也不能进行变速。在拨链器22动作以变更变速比r且曲柄轴12停止旋转或正在摆动的情况下,控制部72控制马达24以通过马达24驱动传递体20,从而能够使第一旋转体14及第二旋转体18旋转,故能够通过拨链器22进行变速。
217.控制部72包括以下(b1)、(b2)、(b3)、以及(b4)中的至少一个结构,并在拨链器22动作以变更变速比r的情况下且在满足与踩踏相关的预定条件的情况下,控制马达24。控制部72可以包括(b1)、(b2)、(b3)、以及(b4)结构中的两个结构,可以包括三个结构,也可以包括所有结构。
218.(b1)控制部72构成为,以根据车轮16的转速nw及变速比r算出的第一转速n1、与预定转速nx或预定范围内的转速na的差dn越大,则马达24的转速nm越大的方式,控制马达24,并通过马达24驱动传递体20。优选地,第一转速n1、预定转速nx、以及预定范围内的转速na
与曲柄轴12的转速nc对应。预定转速nx和预定范围内的转速na为50rpm以上且80rpm以下的转速。
219.(b2)控制部72构成为,根据人力驱动车10在行进方向上的加速度,变更马达24的转速。控制部72构成为,以人力驱动车10的加速度越大则马达24的转速nm越大的方式,控制马达24,并通过马达24来驱动传递体20。
220.(b3)控制部72构成为,控制马达24,以根据人力驱动车10的状态变更马达24的旋转角度ca以及马达24的输出转矩mt中的至少一者。人力驱动车10的状态包括车轮16的转速nw以及变速比r中的至少一者。优选地,控制部72构成为,以根据车轮16的转速nw及变速比r算出的第一转速n1、与预定转速nx或预定范围内的转速na的差越大,则马达24的旋转角度mn、以及输出转矩mt中的至少一者越大的方式,控制马达24。
221.(b4)控制部72构成为,控制马达24,以根据人力驱动车10的状态变更马达24的旋转角度ca以及马达24的输出转矩mt中的至少一者。人力驱动车10的状态包括人力驱动车10的车速v的变化或车轮16的转速nw的变化。优选地,控制部72构成为,以人力驱动车10在行进方向上的加速度或减速度越大,或者车轮16的转速nw在与人力驱动车10的行进方向对应的旋转方向上的加速度或减速度越大,则马达24的旋转角度以及输出转矩mt中的至少一者越大的方式,控制马达24,并通过马达24来驱动传递体20。控制部72构成为,例如能够通过将车速v微分,从而算出人力驱动车10在行进方向上的加速度或减速度。人力驱动车10可以包括加速度传感器,该加速度传感器检测与人力驱动车10在行进方向上的加速度或减速度相关的信息。在人力驱动车10包括加速度传感器的情况下,将加速度传感器检测到的信息输入至控制部72。
222.控制部72可以在包括(b1)、(b2)、(b3)、以及(b4)中的至少一个结构以外,或作为其替代,构成为根据变速比r或变速档进行控制,以使马达24的输出不同。优选地,存储部74将与变速比r相关的信息、和与马达24的输出相关的信息相对应地存储。与变速比r相关的信息和与马达24的输出相关的信息的对应可以存储为表格,也可存储为函数。控制部72构成为,根据变速状态传感器88的检测结果与存储于存储部74的信息,来控制马达24。
223.优选地,控制部72构成为,在拨链器22动作以变更变速比r的情况下且在满足与踩踏相关的预定条件的情况下,即使第一操作装置44被操作,也会控制马达24不驱动传递体20。控制部72构成为,在拨链器22动作以变更变速比r的情况下且在满足与踩踏相关的预定条件的情况下,当马达24的非驱动条件成立时,控制马达24不驱动传递体20。马达24的非驱动条件包括第一非驱动条件及第二非驱动条件中的至少一者。控制部72可以构成为,在第一非驱动条件及第二非驱动条件中的仅一者或两者成立的情况下,控制马达24停止。
224.在第一操作装置44被操作期间、和第一操作装置44被操作后的预定期间中的至少一种情况下,第一非驱动条件成立。在控制部72根据第一非驱动条件控制马达24的情况下,即使拨链器22动作以变更变速比r且满足与踩踏相关的预定条件,控制部72在第一操作装置44被操作期间和第一操作装置44被操作后的预定期间中的至少一个期间内,控制马达24不驱动传递体20。
225.在第一操作装置44所包括的第一操作部44a被操作、或者对第一操作装置44进行了预定操作的情况下,第二非驱动条件成立。在控制部72根据第二非驱动条件控制马达24的情况下,即使拨链器22动作以变更变速比r且满足与踩踏相关的预定条件,若第一操作装
置44所包括的第一操作部44a被操作、或对第一操作部44a进行了预定操作,则控制部72控制马达24不驱动传递体20。
226.控制部72也可以构成为,代替第一非驱动条件及第二非驱动条件中的至少一者,或者在其基础上,以下第三~第六非驱动条件中的至少一者成立的情况下,控制马达24不驱动传递体20。
227.在人力驱动车10在行进方向上的加速度大于第一值的情况下,第三非驱动条件成立。在人力驱动车10在行进方向上的减速度大于第二值的情况下,第四非驱动条件成立。在车轮16的转速nw在与人力驱动车10的行进方向对应的旋转方向上的加速度大于第三值的情况下,第五非驱动条件成立。在车轮16的转速nw在与人力驱动车10的行进方向对应的旋转方向上的减速度大于第四值的情况下,第六非驱动条件成立。控制部72构成为,例如,能够通过将车轮16的转速nw微分,从而算出车轮16的转速nw在与人力驱动车10的行进方向对应的旋转方向上的加速度及减速度中的至少一者。第一值及第三值是与人力驱动车10突然加速的情况对应的值,例如可通过实验等预先设定。第二值及第四值是与人力驱动车10突然减速的情况对应的值,例如可通过实验等预先设定。控制部72能够在人力驱动车10在行进方向上突然加速或突然减速的情况下,抑制变速比r发生变更。
228.控制部72构成为,在通过满足与踩踏相关的预定条件,从而控制马达24以通过马达24驱动传递体20的情况下,若马达24的停止条件成立,则控制马达24以停止马达24对传递体20的驱动。马达24的停止条件包括第一停止条件及第二停止条件中的至少一者。控制部72可以构成为,在第一停止条件及第二停止条件中的仅一者或两者成立的情况下,控制马达24停止。
229.第一停止条件与马达24的负载l相关。在根据第一停止条件控制马达24的情况下,例如,控制部72构成为,在拨链器22动作以变更变速比r的情况下且在满足与踩踏相关的预定条件的情况下,控制马达24,以通过马达24来驱动传递体20,并根据马达24的负载l,停止马达24对传递体20的驱动。例如,在马达24的负载l达到预定负载l1以上的情况下,第一停止条件成立。优选地,控制部72构成为,在拨链器22动作以变更变速比r、满足预定的踩踏相关条件、且马达24的负载l为预定负载l1以上的情况下,控制马达24以使马达24停止。
230.预定负载l1例如设置为,在人力驱动车10的后轮16a不接触地面而能够自由旋转的状态下,比仅通过马达24的驱动力使后轮16a旋转时产生的负载l大,并且比在平地上推进人力驱动车10时产生的负载l小的值。在此情况下,在人力驱动车10的后轮16a不接触地面而能够自由旋转的状态下,传递体20由马达24驱动,但在人力驱动车10的后轮16a接触地面的状态下,在平地上仅靠马达24的驱动力无法推进人力驱动车10。
231.第二停止条件与人力驱动车10的车速v或车轮16的转速nw相关。在人力驱动车10的车速v为第一速度v1以下或者车轮16的转速nw为预定转速nx以下的情况下,第二停止条件成立。在根据第二停止条件控制马达24的情况下,例如,控制部72构成为,当满足与踩踏相关的预定条件时,若人力驱动车10的车速v为第一速度v1以下或车轮16的转速nw为预定转速nx以下,则控制马达24以停止传递体20的驱动。第一速度v1及预定转速nx例如为适合于判定人力驱动车10停止行驶的值。第一速度v1例如为0km/h以上且3km/h以下范围内的值。预定转速nx例如为0rpm以上且5rpm以下范围内的值。
232.即使在人力驱动车10滑行的情况下,控制部72也能够抑制在人力驱动车10停止时
变更变速比r。在根据第二停止条件控制马达24的情况下,例如,控制部72可以构成为,当满足与踩踏相关的预定条件且与人力驱动车10的行驶状态相关的预定条件成立时,若人力驱动车10的车速v为第一速度v1以下或车轮16的转速nw为预定转速nx以下,则控制马达24以停止传递体20的驱动。根据该结构,不管骑行者的意图如何,在控制部72根据行驶条件来通过拨链器22变更变速比r的情况下,可以抑制在人力驱动车10停止时变速比r变小。控制部72也可以构成为,设定车速v为第一速度v1以下或车轮16的转速nw为预定转速nx以下时的变速比r的下限值。
233.在车速v为第一速度v1以下或车轮16的转速nw为预定转速nx以下的情况下,控制部72通过拨链器22变更变速比r,以使变速比不小于变速比r的下限值。在该情况下,由于能够抑制人力驱动车10在变速比r小于下限值的状态下重新行驶,因此能够适当地重新开始人力驱动车10的行驶。变速比r的下限值储存于存储部74。控制部72可以构成为,通过使用者操作第一操作装置44或外部装置90,从而变更存储于存储部74的变速比r的下限值。外部装置90例如至少包括个人计算机、平板电脑、及智能手机中的至少一者。
234.控制部72除了根据第一停止条件及第二停止条件中的至少一者控制马达24的结构以外,可以在此基础上或作为其替代,根据第三停止条件及第四停止条件中的至少一者,将马达24停止。在即使驱动马达24,变速比r也不变化的情况下,第三停止条件成立。在人力驱动车10的制动装置的制动力为预定制动力以上的情况下,第四停止条件成立。
235.参照图5,对控制部72控制马达24及电动致动器48来变更变速比r的处理进行说明。若电力供给至控制部72,则控制部72开始处理并进入图5所示的流程图的步骤s11。若图5的流程图结束,则控制部72在规定周期后重复自步骤s11开始的处理,直至电力供给停止。
236.在步骤s11中,控制部72判定变速执行条件是否成立。在变速条件不成立的情况下,控制部72结束处理。在变速条件成立的情况下,控制部72进入步骤s12。
237.在步骤s12中,控制部72确定目标变速比r,然后进入步骤s10。在步骤s12中,也可以代替目标变速比r,而确定目标变速档。
238.在步骤s10中,控制部72判定是否能够变速。若判定为可变速,则控制部72进入步骤s13,若判定为不可变速,则控制部72结束处理。由拨链器22、第一旋转体14及第二旋转体18构成的变速器,能够在由第一旋转体14及第二旋转体18所确定的最小的变速比r以上且最大的变速比r以下的范围内进行变速。控制部72构成为,在当前变速比r为最小的变速比r的情况下,不执行减小变速比r的控制。
239.控制部72构成为,在当前变速比r为最大的变速比r的情况下,不执行增大变速比r的控制。例如,控制部72判定目标变速比r是否为由第一旋转体14及第二旋转体18所确定的最小的变速比r以上且最大的变速比r以下。与最小的变速比r及最大的变速比r相关的信息存储于存储部74。在步骤s10中,在目标变速比r为由第一旋转体14及第二旋转体18所确定的最小的变速比r以上且最大的变速比r以下的情况下,由于能够变速,因此,控制部72进入步骤s13。在步骤s10中,在目标变速比r并非为由第一旋转体14及第二旋转体18所确定的最小的变速比r以上且最大的变速比r以下的情况下,由于无法进行变速,因此控制部72结束处理。
240.在步骤s12中,在代替目标变速比r而确定目标变速档的情况下,在步骤s10中,控制部72可以比较目标变速档、和与存储于存储部74变速档相关的信息。例如,在目标变速档
是第十三变速档,且存储部74存储有与第一变速档~第十二变速档相关的信息的情况下,控制部72判定不能进行变速并结束处理。
241.在步骤s13中,控制部72判定是否满足与踩踏相关的预定条件。在满足与踩踏相关的预定条件的情况下,控制部72进入步骤s20。
242.在步骤s20中,控制部72判定非驱动条件是否成立。在非驱动条件不成立的情况下,控制部72进入步骤s30。在非驱动条件成立的情况下,控制部72结束处理。
243.在步骤s30中,控制部72判定是否禁止变速。在步骤s30中,在判定为不禁止变速的情况下,控制部72进入步骤s14。在步骤s30中,在判定禁止变速的情况下,控制部72结束处理。控制部72例如根据(b1)、(b2)、(b3)、以及(b4)中的至少一个结构,来判定是否禁止变速。例如,在控制部72包括(b1)结构的情况下,控制部72在目标变速比r大于当前变速比r时,判定禁止变速,在目标变速比r小于当前变速比r时,判定不禁止变速。
244.例如,在控制部72包括(b2)结构的情况下,控制部72在拨链器22动作的情况下,在满足与变速相关的第一条件之前,判定禁止变速,若满足与变速相关的第一条件,则判定不禁止变速。例如,在控制部72包括(b3)结构的情况下,当控制部72控制电动致动器48及马达24以使变速比r在预定的第三时间t3内增减预定次数以上时,在满足与变速相关的第二条件之前,判定禁止变速,若满足与变速相关的第二条件,则判定不禁止变速。
245.预定的第三时间t3例如是1秒~10秒的范围内的时间。预定次数例如是2次~10次的范围内的值。例如,在控制部72包括(b4)结构的情况下,控制部72在人力驱动车10的车速v为第一速度v1以下时,判定禁止变速,在人力驱动车10的车速v超过第一速度v1时,判定不禁止变速。例如,在控制部72包括(b4)结构的情况下,控制部72在车轮16的转速nw为预定转速nx以下时,判定禁止变速,在车轮16的转速nw超过预定转速nx时,判定不禁止变速。
246.在步骤s14中,控制部72控制马达24以通过马达24驱动传递体20,然后进入步骤s15。在步骤s15中,控制部72控制电动致动器48以使拨链器22开始变速动作,以达到目标变速比r,然后进入步骤s16。在本实施方式中,控制部72通过执行步骤s14及步骤s15的处理,从而控制电动致动器48和马达24,以在电动致动器48开始动作之前驱动马达24。换句话说,控制部72通过执行步骤s14及步骤s15的处理,从而控制电动致动器4 8和马达24,以在拨链器22开始动作之前驱动传递体20。
247.控制部72可以通过执行步骤s14及步骤s15的处理,从而控制电动致动器48和马达24,以同时开始电动致动器48的动作和马达24的驱动。换句话说,控制部72可以通过执行步骤s14及步骤s15的处理,从而控制电动致动器48和马达24,以同时开始拨链器22的动作和传递体20的驱动。控制部72可以通过执行步骤s14及步骤s15的处理,从而控制电动致动器48和马达24,以在电动致动器48开始动作之后驱动马达24。换句话说,控制部72可以通过执行步骤s14及步骤s15的处理,从而控制电动致动器48和马达24,以在拨链器22开始动作之后驱动传递体20。
248.在步骤s16中,控制部72判定马达24的停止条件是否成立。在马达24的停止条件不成立的情况下,控制部72进入步骤s17。在步骤s17中,控制部72判定变速是否完成。在变速未完成的情况下,控制部72进入步骤s16。在步骤s16中,在马达24的停止条件成立的情况下,控制部72进入步骤s18。在步骤s17中,在变速完成的情况下,控制部72进入步骤s18。在步骤s18中,控制部72控制马达24以停止马达24,然后结束处理。
249.在步骤s13中,在不满足与踩踏相关的预定条件的情况下,控制部72进入步骤s19。在步骤s19中,控制部72控制电动致动器48,通过电动致动器48使拨链器22动作以达到目标变速比r,然后结束处理。
250.优选地,控制部72构成为接收用于调整拨链器22的位置的信号,并构成为,在接收到用于调整拨链器22的位置的信号的情况下,驱动马达24,在对应于马达24的转速及车轮16的转速nw的第一变速比r1、与当前拨链器22的位置不对应的情况下,控制电动致动器48,以使拨链器22的位置与第一变速比r1对应。
251.用于调整拨链器22的位置的信号例如,从与控制部72连接的外部装置90发出。用于调整拨链器22的位置的信号也可以从第一操作装置44或第二操作装置45发出。例如,第二操作装置45可以构成为,在第二操作部45a及第三操作部45b被同时操作的情况下,发送用于调整拨链器22的位置的信号。优选地,控制装置70包括接口89。接口89包括无线通信装置及通信线的连接端口中的至少一者。接口89可通信地连接于控制部72。在接口89包括无线通信装置的情况下,例如可通过bluetooth(注册商标)、ant (注册商标)等近距离无线通信,与外部装置90、第一操作装置44、以及第二操作装置45中的至少一者可通信地连接。
252.参照图6,对控制部72控制马达24及电动致动器48以调整拨链器22的位置的处理进行说明。若电力供给至控制部72,则控制部72开始处理并进入到图6所示的流程图的步骤s21。若图6的流程图结束,则控制部72在规定周期后重复从步骤s21开始的处理,直至电力供给停止。拨链器22的位置调整是在人力驱动车10的后轮16a不接触地面而能够自由旋转的状态下实施的。
253.在步骤s21中,控制部72判定是否接收到用于调整拨链器22的位置的信号。在未接收到用于调整拨链器22的位置的信号的情况下,控制部72结束处理。在接收到用于调整拨链器22的位置的信号的情况下,控制部72进入步骤s22。
254.在步骤s22中,控制部72控制马达24以通过马达24驱动传递体20,然后进入步骤s23。在步骤s23中,控制部72判定马达24是否旋转。在判定马达24旋转的情况下,控制部72进入步骤s24。在判定马达24未旋转的情况下,控制部72进入步骤s28。在步骤s23中,控制部72也可以不判定马达24是否旋转,而是判定第一旋转体14是否旋转、第二旋转体18是否旋转、或者后轮16a是否旋转。控制部72在判定第一旋转体14旋转的情况、判定第二旋转体18旋转的情况、以及判定后轮16a旋转的情况中的任意一种情况下,均进入步骤s24。
255.在步骤s24中,控制部72判定与马达24的转速nm及车轮16的转速nw对应的第一变速比r1是否与拨链器22的当前位置对应。控制部72例如根据由变速状态传感器88检测的拨链器22的当前位置,来判定与马达24的转速nm及车轮16的转速nw对应的第一变速比r1是否与拨链器22的当前位置对应。在与马达24的转速nm及车轮16的转速nw对应的第一变速比r1、与拨链器22的当前位置对应的情况下,控制部72进入步骤s28。在与马达24的转速nm及车轮16的转速nw对应的第一变速比r1、与拨链器22的当前位置不对应的情况下,控制部72进入步骤s25。
256.在步骤s25中,控制部72控制电动致动器48,使拨链器22开始动作以增大变速比r或减小变速比r,然后进入步骤s26。在步骤s25中,控制部72根据与马达24的转速nm及车轮16的转速nw对应的第一变速比r1、和拨链器22的当前位置,来确定是使拨链器22动作以增大变速比,还是使拨链器22动作以减小变速比,并控制电动致动器48。
257.在步骤s26中,控制部72判定与马达24的转速nm及车轮16的转速nw对应的第一变速比r1是否与拨链器22的当前位置对应。例如,与步骤s24相同地,控制部72进行步骤s26的判定处理。在与马达24的转速nm及车轮16的转速nw对应的第一变速比r1与拨链器22的当前位置不对应的情况下,控制部72再次执行步骤s26的处理。在与马达24的转速nm及车轮16的转速nw对应的第一变速比r1与拨链器22的当前位置时对应的情况下,控制部72进入步骤s27。
258.在步骤s27中,控制部72控制电动致动器48以使拨链器22的动作停止,并进入步骤s28。在步骤s28中,控制部72控制马达24以使马达24停止,并结束处理。
259.本实施方式中,在步骤s14中驱动马达24的情况下,优选地,控制部72以由马达24驱动的第二旋转体18的转速小于后轮16a的转速的方式驱动马达24。在由马达24驱动的第二旋转体18的转速小于后轮16a的转速的情况下,马达24的驱动力不传递至后轮16a。在步骤s14中驱动马达24的情况下,控制部72也可以以马达24的负载l小于在平地上推进人力驱动车10时产生的负载l的值的方式,驱动马达24。
260.<第二实施方式>
261.参照图7及图8,说明第二实施方式的控制装置70。第二实施方式的控制装置70除了能够切换第一模式及第二模式以外,与第一实施方式的控制装置70相同,因此对于与第一实施方式共通的结构,附加与第一实施方式相同的符号,并省略重复说明。
262.控制部72可以构成为,能够切换第一模式与第二模式。控制部72构成为,在第一模式下,在第二操作装置45被操作的情况下且在满足与踩踏相关的预定条件的情况下,控制马达24,以根据人力驱动车10的状态驱动传递体20。控制部72构成为,在第二模式下,即使在第二操作装置45被操作的情况下且在满足与踩踏相关的预定条件的情况下,也会控制马达24以使马达24不驱动传递体20。
263.例如,控制部72构成为,能够根据第二操作装置45及外部装置90中至少一者的操作,来切换第一模式与第二模式。控制部72可以构成为,在第一模式下,因与人力驱动车10的行驶状态相关的预定条件成立而变速条件成立的情况下且在满足与踩踏相关的预定条件的情况下,控制马达24,以根据人力驱动车10的状态驱动传递体20。控制部72可以构成为,在第二模式下,即使在因与人力驱动车10的行驶状态相关的预定条件成立而变速条件成立的情况下且在满足与踩踏相关的预定条件的情况下,也会控制马达24而不驱动传递体20。
264.参照图7,对控制部72切换第一模式与第二模式的处理进行说明。若电力供给至控制部72,则控制部72开始处理并进入图7所示的流程图的步骤s31。若图7的流程图结束,则控制部72在规定周期后重复进行从步骤s31开始的处理,直至电力供给停止。
265.在步骤s31中,控制部72判定是否存在切换模式请求。例如,在对第二操作装置45及外部装置90中的至少一者进行了用于切换模式的操作的情况下,控制部72判定存在切换模式请求。在不存在模式切换请求的情况下,控制部72结束处理。在存在模式切换请求的情况下,控制部72进入步骤s32。
266.在步骤s32中,控制部72判定是否为第一模式。在为第一模式的情况下,控制部72进入步骤s33。在步骤s33中,控制部72将模式切换为第二模式,并结束处理。
267.在步骤s32中,在并非第一模式的情况下,控制部72进入步骤s34。在步骤s34中,控
制部72将模式切换为第一模式,并结束处理。
268.参照图5及图8,对控制部72控制马达24及电动致动器48以变更变速比r的处理进行说明。若电力供给至控制部72,则控制部72开始处理并进入图5所示的流程图的步骤s11。若图5的流程图结束,则控制部72在规定周期后重复进行从步骤s11开始的处理,直至电力供给停止。
269.在步骤s13中判定为“是”的情况下,控制部72进入图8的步骤s41。在步骤s41中,在为第一模式的情况下,控制部72进入图5的步骤s20。在步骤s41中,在并非第一模式的情况下,控制部72结束处理。
270.<第三实施方式>
271.参照图9及图10,说明第三实施方式的控制装置70。第三实施方式的控制装置70除了控制部72不通过电动致动器48控制拨链器22这点以外,与第一实施方式及第二实施方式的控制装置70相同,故对于与第一实施方式及第二实施方式共通的结构,附加与第一实施方式及第二实施方式相同的符号,并省略重复说明。
272.本实施方式的拨链器22例如是缆线式变速器,该缆线式变速器构成为,通过鲍登线与手动变速操作装置连接,通过使用者经由手动变速操作装置机械地操作鲍登线,从而动作。手动变速操作装置例如设置于车把42。
273.本实施方式的变速状态传感器88可以设置于拨链器22,也可以设置于鲍登线、或者手动变速操作装置。例如,变速状态传感器88构成为,检测拨链器22的可动部的动作、鲍登线的动作、以及手动变速操作装置的动作中的至少一者。
274.本实施方式的控制部72构成为,在拨链器22动作以变更变速比r的情况下且在满足与踩踏相关的预定条件的情况下,控制马达24以通过马达24驱动传递体20。
275.参照图10,对控制部72控制马达24以变更变速比r的处理进行说明。若电力供给至控制部72,则控制部72开始处理并进入图10所示的流程图的步骤s51。若图10的流程图结束,则控制部72在规定周期后重复进行从步骤s51开始的处理,直至电力供给停止。
276.在图10的流程图中,步骤s13、步骤s20、步骤s14、步骤s16、以及步骤s18的各处理与图5的流程图中的步骤s13、步骤s20、步骤s14、步骤s16、以及步骤s18同样地被执行。
277.在图10的处理中,若在步骤s51中检测到变速操作,则控制部72进入步骤s13。例如,若变速状态传感器88的输出信号发生变化,则控制部72检测出变速操作。若在步骤s51中未检测到变速操作,则控制部72结束处理。若在步骤s51中检测到变速操作,则控制部72进入步骤s13。在步骤s13中的判定为“是”的情况下,控制部72进入步骤s20。在步骤s20中的判定为“是”的情况下,控制部72进入步骤s14。
278.在步骤s14中,控制部72控制马达24以通过马达24驱动传递体20,然后进入步骤s16。在步骤s16中的判定为“否”的情况下,控制部72进入步骤s57。在步骤s57中,控制部72判定变速操作是否停止。在步骤s57中,若判定变速操作停止,则控制部72进入步骤s18。若判定变速操作未停止,则控制部72进入步骤s16。图10的处理中,在步骤s13中,在不满足与踩踏相关的预定条件的情况下,控制部72结束处理。
279.<第四实施方式>
280.参照图11及图12,说明第四实施方式的控制装置70。第四实施方式的控制装置70除了控制部72具有第一变速模式与第二变速模式这点以外,与第一实施方式及第二实施方
式的控制装置70相同,因此对于与第一实施方式及第二实施方式共通的结构,附加与第一实施方式及第二实施方式相同的符号,并省略重复说明。
281.本实施方式的人力驱动车10具备变速操作装置92。优选地,变速操作装置92构成为,与第一实施方式的第二操作装置45及第三操作装置中的至少一者相同。变速操作装置92也可以为与第二操作装置45不同的结构。
282.控制部72构成为控制电动致动器48及马达24。控制装置70构成为能够切换第一变速模式与第二变速模式。在第一变速模式下,根据人力驱动车10的状态控制电动致动器48。在第二变速模式下,根据设置于人力驱动车10的变速操作装置92的操作,来控制电动致动器48。优选地,第一变速模式与第一实施方式的自动变速模式对应,第二变速模式与第一实施方式的手动变速模式对应。优选地,第一变速模式与第二变速模式可通过与切换自动变速模式及手动变速模式时相同的操作,来进行切换。
283.控制装置70构成为,能够在第一变速模式下,切换第三模式与第四模式。控制装置70构成为,在第三模式下,在拨链器22动作以变更变速比r的情况下且在满足与踩踏相关的预定条件的情况下,控制马达24,以根据人力驱动车10的状态来驱动传递体20。在第四模式下,即使在拨链器22动作以变更变速比r的情况下且在满足与踩踏相关的预定条件的情况下,也控制马达24不驱动传递体20。
284.参照图12,对控制部72在第一变速模式下切换第三模式与第四模式的处理进行说明。若电力供给至控制部72,则控制部72开始处理并进入到图12所示的流程图的步骤s61。若图12的流程图结束,则控制部72在规定周期后重复进行从步骤s61开始的处理,直至电力供给停止。
285.在步骤s61中,控制部72判定是否存在第一变速模式的切换请求。例如,在对变速操作装置92进行了用于切换第一变速模式的操作的情况下,控制部72判定存在第一变速模式的切换请求。在不存在第一变速模式的切换请求的情况下,控制部72结束处理。在存在第一变速模式的切换请求的情况下,控制部72进入步骤s62。
286.在步骤s62中,控制部72判定是否为第三模式。在为第三模式的情况下,控制部72进入步骤s63。在步骤s63中,控制部72将模式切换为第四模式并结束处理。
287.在步骤s62中,在并非为第三模式的情况下,控制部72进入步骤s64。在步骤s64中,控制部72将模式切换为第三模式并结束处理。
288.<变形例>
289.关于实施方式的说明是根据本发明的人力驱动车用的控制装置及动力传递系统可采用的方式的示例,并不意图限制其方式。本发明的人力驱动车用的控制装置及动力传递系统可以采用例如以下所示的实施方式的变形例、及相互不矛盾的至少两个变形例的组合的方式。在以下变形例中,对于与实施方式的形态共通的部分,附加与实施方式相同的符号,并省略其说明。
290.·
控制部72可以包括(a1)、(a2)、(a3)以及(a4)中的至少一个结构的基础上,包括(a5)及(a6)中的至少一个结构,或者包括(a5)及(a6)中的至少一个结构以代替包括(a1)、(a2)、(a3)以及(a4)中的至少一个结构。
291.(a5)控制部72构成为,控制电动致动器48以使变速比r仅在增加方向及减少方向中的一个方向上变更。控制部72可以构成为,在拨链器22动作以变更变速比r的情况下且在
满足与踩踏相关的预定条件的情况下,能够选择是在增加方向上变更变速比r,还是在减少方向上变更变速比r。例如,通过使用者操作第一操作装置44或外部装置90,从而在拨链器22动作以变更变速比r的情况下且在满足与踩踏相关的预定条件的情况下,选择是在增加方向上变更变速比r,还是在减少方向上变更变速比r。
292.(a6)控制部72构成为,控制电动致动器48以在预定的变速范围内变更变速比r。与预定的变速范围相关的信息存储于存储部74。与预定的变速范围相关的信息可以可变更地存储于存储部74。例如使用者通过操作第一操作装置44或外部装置90,从而变更存储于存储部74的与预定的变速范围相关的信息。
293.在(a6)结构的第一例中,预定的变速范围包括预定的第三变速比r3以下的范围,预定的第三变速比r3小于能够由拨链器22变更的变速比r中的最大的变速比r。在(a6)构成的第二例中,预定的变速范围包括预定的第四变速比r4以上的范围,预定的第四变速比r4大于能够由拨链器22变更的变速比r中的最小的变速比r。
294.优选地,在(a6)结构中,控制部72构成为,在拨链器22动作以变更变速比r、满足与踩踏相关的预定条件、且人力驱动车10的车速v为预定的第六速度v6以下的情况、和在拨链器22动作以变更变速比r、满足与踩踏相关的预定条件、且人力驱动车10的曲柄轴12的转速n为预定的第三转速n3以下的情况中的至少一种情况下,控制电动致动器48以在预定的变速范围内变更变速比r,并通过马达24驱动传递体20。
295.在(a6)结构中,在人力驱动车10的行驶道路从上坡变成下坡的情况、和人力驱动车10的车速v从增加状态变成减速状态的情况中的至少一种情况下,控制部72可以控制电动致动器48以在预定的变速范围内变更变速比r。在(a6)结构中,控制部72可以在人力驱动车10的行驶道路从上坡变成下坡、且人力驱动车10的车速v从增加状态变成减速状态的情况下,控制部72可以控制电动致动器48以在预定的变速范围内变更变速比r。
296.·
控制部72只要为如下结构,则可以省略其他结构:在拨链器22动作以变更变速比r的情况下且在满足与踩踏相关的预定条件的情况下,以根据车轮的转速及变速比r算出的第一转速n1、与预定转速或预定范围内的转速的差越大,则马达24的转速越大的方式,控制马达24,并通过马达24驱动传递体20。该变形例中,拨链器22可以具有电动致动器48,也可以不具有电动致动器48。
297.参照图13,对控制部72控制马达24以变更变速比r的处理进行说明。若电力供给至控制部72,则控制部72开始处理并进入图13所示的流程图的步骤s71。若图13的流程图结束,则控制部72在规定周期后重复进行从步骤s71开始的处理,直至电力供给停止。
298.在步骤s71中,控制部72判定拨链器22是否动作。例如,在第一实施方式的变速执行条件成立的情况下,控制部72判定拨链器22动作。优选地,在变速执行条件成立且能够变速的情况下,控制部72判定拨链器22动作。例如,在步骤s71中,控制部72执行与第一实施方式的图5的步骤s11、步骤s12、以及步骤s10相同的处理,在步骤s11中判定为“是”且步骤s10中判定为“是”的情况下,判定拨链器22动作。控制部72也可以根据检测拨链器22的动作的传感器、检测鲍登缆线的动作的传感器或检测变速操作装置92的动作的传感器的输出,来判断拨链器22是否动作。当拨链器22未动作时,控制部72结束处理。当拨链器22动作时,控制部72进入到步骤s72。
299.在步骤s72中,控制部72判定是否满足与踩踏相关的预定条件。在不满足与踩踏相
关的预定条件的情况下,控制部72结束处理。在满足与踩踏相关的预定条件的情况下,控制部72进入步骤s73。
300.在步骤s73中,控制部72以第一转速n1与预定转速或预定范围内的转速的差越大则马达24的转速越大的方式,控制马达24,然后进入步骤s74。在步骤s73中,控制部72控制马达24以通过马达24驱动传递体20。
301.在步骤s74中,控制部72判定变速是否完成。在变速未完成的情况下,控制部72进入步骤s73。在变速完成的情况下,控制部72进入步骤s75。在步骤s75中,控制部72停止马达24对传递体20的驱动并结束处理。
302.·
控制部72只要为如下结构,则可以省略其他结构:在拨链器22动作以变更变速比r的情况下且在满足与踩踏相关的预定条件的情况下,控制部72根据人力驱动车10在行进方向上的加速度,变更马达24的转速,以人力驱动车10的加速度越大则马达24的转速越大的方式控制马达24,并通过马达24来驱动传递体20。在该变形例中,拨链器22可以具有电动致动器48,也可以不具有电动致动器48。
303.参照图14,对控制部72控制马达24以变更变速比r的处理进行说明。若电力供给至控制部72,则控制部72开始处理并进入图14所示的流程图的步骤s81。若图14的流程图结束,则控制部72在规定周期后重复进行从步骤s81开始的处理,直至电力供给停止。
304.在步骤s81中,控制部72判定拨链器22是否动作。例如,在步骤s81中,控制部72执行与图13的步骤s71相同的处理。在拨链器22未动作的情况下,控制部72结束处理。在拨链器22动作的情况下,控制部72进入步骤s82。
305.在步骤s82中,控制部72判定是否满足与踩踏相关的预定条件。在不满足与踩踏相关的预定条件的情况下,控制部72结束处理。在满足与踩踏相关的预定条件的情况下,控制部72进入步骤s83。
306.在步骤s83中,控制部72以人力驱动车10的加速度越大则马达24的转速越大的方式,控制马达24,然后进入步骤s84。在步骤s83中,控制部72控制马达24以通过马达24驱动传递体20。
307.在步骤s84中,控制部72判定变速是否完成。在变速未完成的情况下,控制部72进入步骤s83。在变速完成的情况下,控制部72进入步骤s85。在步骤s85中,控制部72停止马达24对传递体20的驱动,并结束处理。
308.·
在拨链器22动作以变更变速比r的情况下且在满足与踩踏相关的预定条件的情况下,控制部72根据人力驱动车10的状态,控制马达24以变更马达24的旋转角度及马达24的输出转矩中的至少一者,并通过马达24驱动传递体20,控制部72只要为这样的结构,则可以省略其他结构。该变形例中,拨链器22可以具有电动致动器48,也可以不具有电动致动器48。
309.参照图15,对控制部72控制马达24以变更变速比r的处理进行说明。若电力供给至控制部72,则控制部72开始处理并进入图15所示的流程图的步骤s91。若图15的流程图结束,则控制部72在规定周期后重复进行从步骤s91开始的处理,直至电力供给停止。
310.在步骤s91中,控制部72判定拨链器22是否动作。例如,在步骤s91中,控制部72执行与图13的步骤s71相同的处理。在拨链器22未动作的情况下,控制部72结束处理。在拨链器22动作的情况下,控制部72进入步骤s92。
311.在步骤s92中,控制部72判定是否满足与踩踏相关的预定条件。在不满足与踩踏相关的预定条件的情况下,控制部72结束处理。在满足与踩踏相关的预定条件的情况下,控制部72进入步骤s93。
312.在步骤s93中,控制部72根据人力驱动车10的状态,控制马达24,以变更马达24的旋转角度及马达24的输出转矩中的至少一者,并进入步骤s84。在步骤s93中,控制部72控制马达24以通过马达24驱动传递体20。在步骤s93中,第一例中,人力驱动车10的状态包括车轮16的转速及变速比r,控制部72构成为,以第一转速n1与预定转速或预定范围内的转速的差越大,则马达24的旋转角度及输出转矩中的至少一者越大的方式,控制马达24。
313.在步骤s93中,第二例中,人力驱动车10的状态包括人力驱动车10的车速v的变化或车轮16的转速的变化,控制部72构成为,以人力驱动车10在行进方向上的加速度或减速度越大、或者车轮16的转速在与人力驱动车10的行进方向对应的旋转方向上的加速度或减速度越大,则马达24的旋转角度及输出转矩中的至少一者越大的方式,控制马达24。
314.在步骤s94中,控制部72判定变速是否完成。在变速未完成的情况下,控制部72进入步骤s93。在变速完成的情况下,控制部72进入步骤s95。在步骤s95中,控制部72停止马达24对传递体20的驱动并结束处理。
315.·
控制部72构成为,在拨链器22动作以变更变速比r的情况下且在满足与踩踏相关的预条件的情况下,控制马达24以通过马达24驱动传递体20,并且构成为,即使在拨链器22动作以变更变速比r的情况下且在满足与踩踏相关的预定条件的情况下,若第一操作装置44被操作,则控制马达24不驱动传递体20,控制部72只要为这样的结构,则可以省略其他结构。该变形例中,拨链器22可以具有电动致动器48,也可以不具有电动致动器48。
316.参照图16,对控制部72控制马达24以变更变速比r的处理进行说明。若电力供给至控制部72,则控制部72开始处理并进入图16所示的流程图的步骤s101。若图16的流程图结束,则控制部72在规定周期后重复进行从步骤s101开始的处理,直至电力供给停止。
317.在步骤s101中,控制部72判定拨链器22是否动作。例如,在步骤s101中,控制部72执行与图13的步骤s71相同的处理。在拨链器22未动作的情况下,控制部72结束处理。在拨链器22动作的情况下,控制部72进入步骤s102。
318.在步骤s102中,控制部72判定是否满足与踩踏相关的预定条件。在不满足与踩踏相关的预定条件的情况下,控制部72结束处理。在满足与踩踏相关的预定条件的情况下,控制部72进入步骤s103。
319.在步骤s103中,控制部72判定第一操作装置44是否被操作。在第一操作装置44被操作的情况下,控制部72结束处理。在第一操作装置44未被操作的情况下,控制部72进入步骤s104。
320.在步骤s104中,控制部72控制马达24以通过马达24驱动传递体20,然后进入步骤s105。
321.在步骤s105中,控制部72判定变速是否完成。在变速未完成的情况下,控制部72进入步骤s104。在变速完成的情况下,控制部72进入步骤s106。在步骤s106中,控制部72停止马达24对传递体20的驱动并结束处理。
322.·
在拨链器22动作以变更变速比r的情况下且在满足与踩踏相关的预定条件时,控制部72通过马达24驱动传递体20,并根据马达24的负载l控制马达24以停止马达24对传
递体20的驱动,控制部72只要为这样的结构,则可以省略其他结构。在该变形例中,拨链器22可以具有电动致动器48,也可以不具有电动致动器48。
323.参照图17,对控制部72控制马达24以变更变速比r的处理进行说明。若电力供给至控制部72,则控制部72开始处理并进入图17所示的流程图的步骤s111。若图17的流程图结束,则控制部72在规定周期后重复进行从步骤s111开始的处理,直至电力供给停止。
324.在步骤s111中,控制部72判定拨链器22是否动作。例如,在步骤s111中,控制部72执行与图13的步骤s71相同的处理。在拨链器22未动作的情况下,控制部72结束处理。在拨链器22动作的情况下,控制部72进入步骤s112。
325.在步骤s112中,控制部72判定是否满足与踩踏相关的预定条件。在不满足与踩踏相关的预定条件的情况下,控制部72结束处理。在满足与踩踏相关的预定条件的情况下,控制部72进入步骤s113。
326.在步骤s113中,控制部72控制马达24以通过马达24驱动传递体20,然后进入步骤s114。在步骤s114中,控制部72判定马达24的负载l是否为预定负载l1以上。在马达24的负载l为预定负载l1以上的情况下,控制部72进入步骤s116。在马达24的负载l不为预定负载l1以上的情况下,控制部72进入步骤s115。
327.在步骤s115中,控制部72判定变速是否完成。在变速未完成的情况下,控制部72进入步骤s114。在变速完成的情况下,控制部72进入步骤s116。在步骤s116中,控制部72停止马达24对传递体20的驱动并结束处理。
328.·
控制部72构成为,在拨链器22动作以变更变速比r的情况下且在满足与踩踏相关的预定条件的情况下,通过马达24驱动传递体20,若人力驱动车10的车速v为第一速度v1以下或车轮16的转速为预定转速以下,则控制马达24停止驱动传递体20,控制部72只要为这样的结构,则可以省略其他结构。在该变形例中,拨链器22可以具有电动致动器48,也可以不具有电动致动器48。
329.参照图18,对控制部72控制马达24以变更变速比r的处理进行说明。若电力供给至控制部72,则控制部72开始处理并进入图18所示的流程图的步骤s121。若图18的流程图结束,则控制部72在规定周期后重复进行从步骤s121开始的处理,直至电力供给停止。
330.在步骤s121中,控制部72判定拨链器22是否动作。例如,在步骤s121中,控制部72执行与图13的步骤s71相同的处理。在拨链器22未动作的情况下,控制部72结束处理。在拨链器22动作的情况下,控制部72进入步骤s122。
331.在步骤s122中,控制部72判定是否满足与踩踏相关的预定条件。在不满足与踩踏相关的预定条件的情况下,控制部72结束处理。在满足与踩踏相关的预定条件的情况下,控制部72进入步骤s123。
332.在步骤s123中,控制部72控制马达24以通过马达24驱动传递体20,然后进入步骤s124。在步骤s124中,控制部72判定车速v是否为第一速度v1以下或者车轮16的转速是否为预定转速以下。在马达24的负载为预定负载以上的情况下,控制部72进入步骤s126。在车速v不为第一速度v1以下时的情况下并且车轮16的转速不为预定转速以下的情况下,控制部72进入步骤s125。在步骤s124中,在车速v为第一速度v1以下并且车轮16的转速为预定转速以下的情况下,控制部72也可以进入步骤s126。
333.在步骤s125中,控制部72判定变速是否完成。在变速未完成的情况下,控制部72进
入步骤s124。在变速完成的情况下,控制部72进入步骤s126。在步骤s126中,控制部72停止马达24对传递体20的驱动并结束处理。
334.·
在拨链器22动作以变更变速比r且满足踩踏相关的预定条件的情况下,控制部72控制电动致动器48以使变速比r仅在增加方向或减少方向上变更,并通过马达24驱动传递体20,控制部72只要为这样的结构,则可以省略其他结构。在该变形例中,拨链器22具有电动致动器48。
335.参照图19,对控制部72控制马达24及电动致动器48以变更变速比r的处理进行说明。若电力供给至控制部72,则控制部72开始处理并进入图19所示的流程图的步骤s131。若图19的流程图结束,则控制部72在规定周期后重复进行从步骤s131开始的处理,直至电力供给停止。
336.在步骤s131中,控制部72判定拨链器22是否动作。例如,在第一实施方式的变速执行条件成立的情况下,控制部72判定拨链器22动作。优选地,在变速执行条件成立且能够变速的情况下,控制部72判定拨链器22动作。例如,在步骤s131中,控制部72执行与第一实施方式的图5的步骤s11、步骤s12、以及步骤s10相同的处理,当步骤s11中判定为“是”且在步骤s10中判定为“是”的情况下,判定拨链器22动作。在拨链器22未动作的情况下,控制部72结束处理。在拨链器22动作的情况下,控制部72进入步骤s132。
337.在步骤s132中,控制部72判定是否满足与踩踏相关的预定条件。在不满足与踩踏相关的预定条件的情况下,控制部72结束处理。在满足与踩踏相关的预定条件的情况下,控制部72进入步骤s133。
338.在步骤s133中,控制部72控制电动致动器48以使变速比r仅在增加方向或减少方向中的一者上变更,并通过马达24驱动传递体20,然后进入步骤s134。
339.在步骤s134中,控制部72判定变速是否完成。在变速未完成的情况下,控制部72进入步骤s133。在变速完成的情况下,控制部72进入步骤s135。在步骤s135中,控制部72停止马达24对传递体20的驱动并结束处理。
340.·
在拨链器22动作以变更变速比r且满足踩踏相关的预定条件的情况下,控制部72控制电动致动器48以在预定的变速范围内变更变速比r,并通过马达24驱动传递体20,只要控制部72为这样的结构,则可以省略其他结构。在该变形例中,拨链器22具有电动致动器48。
341.参照图20,对控制部72控制马达24及电动致动器48以变更变速比r的处理进行说明。若电力供给至控制部72,则控制部72开始处理并进入图20所示的流程图的步骤s141。若图20的流程图结束,则控制部72在规定周期后重复进行从步骤s141开始的处理,直至电力供给停止。
342.在步骤s141中,控制部72判定拨链器22是否动作。例如在步骤s141中,控制部72执行与图19的步骤s131相同的处理。在拨链器22未动作的情况下,控制部72结束处理。在拨链器22动作的情况下,控制部72进入步骤s142。
343.在步骤s142中,控制部72判定是否满足与踩踏相关的预定条件。在不满足与踩踏相关的预定条件的情况下,控制部72结束处理。在满足与踩踏相关的预定条件的情况下,控制部72进入步骤s143。
344.在步骤s143中,控制部72控制电动致动器48以在预定的变速范围内变更变速比r,
并通过马达24驱动传递体20,然后进入步骤s144。
345.在步骤s144中,控制部72判定变速是否完成。在变速未完成的情况下,控制部72进入步骤s143。在变速完成的情况下,控制部72进入步骤s145。在步骤s145中,控制部72停止马达24对传递体20的驱动并结束处理。
346.·
控制部72只要为如下的结构,则可以省略其他结构:构成为能够切换根据人力驱动车10的状态来控制电动致动器48的第一变速模式、和根据设于人力驱动车10的变速操作装置的操作来控制电动致动器48的第二变速模式,构成为能够在第一变速模式下,切换第三模式与第四模式,构成为在第三模式下,在拨链器22动作以变更变速比r的情况下且在满足与踩踏相关的预定条件的情况下,控制马达24,以根据人力驱动车10的状态驱动传递体20,构成为在第四模式下,即使在拨链器22动作以变更变速比r的情况下且在满足与踩踏相关的预定条件的情况下,控制马达24不驱动传递体20。在该变形例中,拨链器22具有电动致动器48。
347.参照图21,对控制部72控制马达24以变更变速比r的处理进行说明。若电力供给至控制部72,则控制部72开始处理并进入图21所示的流程图的步骤s151。若图21的流程图结束,则控制部72在规定周期后重复进行从步骤s151开始的处理,直至电力供给停止。
348.在步骤s151中,控制部72判定拨链器22是否动作。例如,在步骤s151中,控制部72执行与图13的步骤s71相同的处理。在拨链器22未动作的情况下,控制部72结束处理。在拨链器22动作的情况下,控制部72进入步骤s152。
349.在步骤s152中,控制部72判定是否满足与踩踏相关的预定条件。在不满足与踩踏相关的预定条件的情况下,控制部72结束处理。在满足与踩踏相关的预定条件的情况下,控制部72进入步骤s153。在步骤s153中,控制部72判定是否为第四模式。在为第四模式的情况下,控制部72结束处理。在不为第四模式的情况下,控制部72进入步骤s154。在步骤s154中,控制部72控制马达24以通过马达24驱动传递体20,然后进入步骤s155。
350.在步骤s155中,控制部72判定变速是否完成。在变速未完成的情况下,控制部72进入步骤s154。在变速完成的情况下,控制部72进入步骤s156。在步骤s156中,控制部72停止马达24对传递体20的驱动并结束处理。
351.控制部72可以通过与图21的流程图不同的处理来控制电动致动器48,也可以在图21的流程图中控制电动致动器48。例如,在步骤s154中控制电动致动器48。
352.·
控制部72只要为如下结构,则可以省略其他结构:构成为控制电动致动器48及马达24,以使根据车轮16的转速及变速比r算出的第一转速n1落入预定范围,构成为在拨链器22动作以变更变速比r且满足踩踏相关的预定条件的情况下,通过马达24驱动传递体20,并且构成为,在拨链器22的多个变速档中,在第一转速n1落入预定范围的情况下,控制电动致动器48,以变成多个变速档中变速比r最大的变速档。在该变形例中,拨链器22具有电动致动器48。
353.参照图22,对控制部72控制马达24及电动致动器48以变更变速比r的处理进行说明。若电力供给至控制部72,则控制部72开始处理并进入图22所示的流程图的步骤s161。若图22的流程图结束,则控制部72在规定周期后重复进行从步骤s161开始的处理,直至电力供给停止。
354.在步骤s161中,控制部72判定拨链器22是否动作。例如,在步骤s161中,控制部72
执行与图19的步骤s131相同的处理。在拨链器22未动作的情况下,控制部72结束处理。在拨链器22动作的情况下,控制部72进入步骤s162。
355.在步骤s162中,控制部72判定是否满足与踩踏相关的预定条件。在不满足与踩踏相关的预定条件的情况下,控制部72结束处理。在满足与踩踏相关的预定条件的情况下,控制部72进入步骤s163。
356.在步骤s163中,控制部72判定第一转速n1是否落入预定范围。在第一转速n1落入预定范围的情况下,控制部72进入步骤s164。在步骤s164中,控制部72控制电动致动器48及马达24,以变成多个变速档中变速比r最大的变速档,然后进入步骤s166。在步骤s164中,控制部72控制马达24以通过马达24驱动传递体20。
357.在步骤s163中,在第一转速n1未落入预定范围的情况下,控制部72进入步骤s165。在步骤s165中,控制部72控制电动致动器48及马达24,以使第一转速n1落入预定范围,然后进入步骤s166。在步骤s165中,控制部72控制马达24以通过马达24驱动传递体20。
358.在步骤s166中,控制部72判定变速是否完成。在变速未完成的情况下,控制部72再次执行步骤s166的处理。在变速完成的情况下,控制部72进入步骤s167。在步骤s167中,控制部72停止马达24对传递体20的驱动并结束处理。
359.·
控制部72只要为如下结构,则可以省略其他结构:构成为在拨链器22动作以变更变速比r的情况下且在满足于踩踏相关的预定条件的情况下,控制马达24以通过马达24驱动传递体20,并构成为在人力驱动车10的车速v为第二速度v2以上、或者车轮16的转速为预定转速以上的情况下,控制电动致动器48,以使变速比r不增大。在该变形例中,拨链器22具有电动致动器48。
360.参照图23,对控制部72控制马达24及电动致动器48以变更变速比r的处理进行说明。若电力供给至控制部72,则控制部72开始处理并进入图23所示的流程图的步骤s171。若图23的流程图结束,则控制部72在规定周期后重复进行从步骤s171开始的处理,直至电力供给停止。
361.在步骤s171中,控制部72判定拨链器22是否动作。例如,在步骤s171中,控制部72执行与图19的步骤s131相同的处理。在拨链器22未动作的情况下,控制部72结束处理。在拨链器22动作的情况下,控制部72进入步骤s172。
362.在步骤s172中,控制部72判定是否满足与踩踏相关的预定条件。在不满足与踩踏相关的预定条件的情况下,控制部72结束处理。在满足与踩踏相关的预定条件的情况下,控制部72进入步骤s173。
363.在步骤s173中,控制部72判定车速v是否为第二速度v2以上、或者车轮16的转速是否为预定转速以上。在车速v为第二速度v2以上、或者车轮16的转速为预定转速以上的情况下,控制部72进入步骤s174。在步骤s174中,控制部72控制电动致动器48及马达24以使变速比r不增大,并进入步骤s176。在步骤s174中,控制部72控制马达24以通过马达24驱动传递体20。在步骤s174中,控制部72控制电动致动器48以使变速比r减小。在步骤s173中,在车速v为第二速度v2以上并且车轮16的转速为预定转速以上的情况下,控制部72也可以进入步骤s174。
364.在步骤s173中,车速v不为第二速度v2以上的情况下并且车轮16的转速不为预定转速以上的情况下,控制部72进入步骤s175。在步骤s175中,控制部72控制电动致动器48及
马达24以变更变速比r,然后进入步骤s176。在步骤s175中,控制部72控制马达24以通过马达24驱动传递体20。
365.在步骤s176中,控制部72判定变速是否完成。在变速未完成的情况下,控制部72再次执行步骤s176的处理。在变速完成的情况下,控制部72进入步骤s177。在步骤s177中,控制部72停止马达24对传递体20的驱动并结束处理。
366.在步骤s174及步骤s175中,控制部72也可以设定目标变速比r。在拨链器22动作的情况下,控制部72可以在其他处理中设定目标变速比r,在步骤s174中,在目标变速比r大于当前变速比r的情况下,可以变更目标变速比r以变为当前变速比r以下。在拨链器22动作的情况下,控制部72可以在其他处理中设定目标变速比r,在步骤s174中,在目标变速比r大于当前变速比r的情况下,也可以不变更变速比r。
367.·
控制部72只要为如下结构,则可以省略其他结构:在通过电动致动器48使拨链器22动作以变更变速比r的情况下且在满足与踩踏相关的预定条件的情况下,控制马达24以驱动传递体20,在拨链器22动作的情况下,控制电动致动器48,以在满足变速相关的第一条件之前不变更变速比r。在该变形例中,拨链器22具有电动致动器48。
368.参照图24,对控制部72控制马达24及电动致动器48以变更变速比r的处理进行说明。若电力供给至控制部72,则控制部72开始处理并进入图24所示的流程图的步骤s181。若图24的流程图结束,则控制部72在规定周期后重复进行从步骤s181开始的处理,直至电力的供给停止。
369.在步骤s181中,控制部72判定拨链器22是否动作。例如,在步骤s181中,控制部72执行与图19的步骤s131相同的处理。在拨链器22未动作的情况下,控制部72结束处理。在拨链器22动作的情况下,控制部72进入步骤s182。
370.在步骤s182中,控制部72判定是否满足与踩踏相关的预定条件。在不满足与踩踏相关的预定条件的情况下,控制部72结束处理。在满足与踩踏相关的预定条件的情况下,控制部72进入步骤s183。
371.在步骤s183中,控制部72判定是否满足与变速相关的第一条件。在不满足与变速相关的第一条件的情况下,控制部72再次执行步骤s183的处理。在满足与变速相关的第一条件的情况下,控制部72进入步骤s184。
372.在步骤s184中,控制部72控制电动致动器48及马达24以变更变速比r,然后进入步骤s185。在步骤s184中,控制部72控制马达24以通过马达24驱动传递体20。
373.在步骤s185中,控制部72判定变速是否完成。在变速未完成的情况下,控制部72再次执行步骤s185的处理。在变速完成的情况下,控制部72进入步骤s186。在步骤s186中,控制部72停止马达24对传递体20的驱动并结束处理。
374.·
控制部72在只要为如下结构,则可以省略其他结构:通过电动致动器48使拨链器22动作以变更变速比r的情况下且在满足与踩踏相关的预定的条件的情况下,控制马达24以驱动传递体20,并构成为,在控制电动致动器48及马达24以使变速比r在预定的第三时间t3内增减预定次数以上的情况下,控制电动致动器48以在满足变速相关的第二条件之前,拨链器22不变更变速比r。在该变形例中,拨链器22具有电动致动器48。
375.参照图25,对控制部72控制马达24及电动致动器48以变更变速比r的处理进行说明。若电力供给至控制部72,则控制部72开始处理并进入图25所示的流程图的步骤s191。若
图25的流程图结束,则控制部72在规定周期后重复进行从步骤s191开始的处理,直至电力供给停止。
376.在步骤s191中,控制部72判定拨链器22是否动作。例如,在步骤s191中,控制部72执行与图19的步骤s131相同的处理。在拨链器22未动作的情况下,控制部72结束处理。在拨链器22动作的情况下,控制部72进入步骤s192。
377.在步骤s192中,控制部72判定是否满足与踩踏相关的预定条件。在不满足与踩踏相关的预定条件的情况下,控制部72结束处理。在满足与踩踏相关的预定条件的情况下,控制部72进入步骤s193。
378.在步骤s193中,控制部72判定是否控制电动致动器48及马达24,以使变速比r在预定的第三时间t3内增减预定次数以上。在控制部72控制电动致动器48及马达24以使变速比r在预定的第三时间t3内增减预定次数以上的情况下,进入步骤s194。在控制部72并未控制电动致动器48及马达24以使变速比r在预定的第三时间t3内增减预定次数以上的情况下,进入步骤s195。
379.在步骤s194中,控制部72判定是否与变速相关的第二条件。在不满足与变速相关的第二条件的情况下,控制部72结束处理。在满足与变速相关的第二条件的情况下,控制部72进入步骤s195。
380.在步骤s195中,控制部72控制电动致动器48及马达24以变更变速比r,然后进入步骤s196。在步骤s195中,控制部72控制马达24以通过马达24驱动传递体20。
381.在步骤s196中,控制部72判定变速是否完成。在变速未完成的情况下,控制部72再次执行步骤s196的处理。在变速完成的情况下,控制部72进入步骤s197。在步骤s197中,控制部72停止马达24对传递体20的驱动并结束处理。
382.·
控制部72只要为如下结构,则可以省略其他结构:在控制电动致动器48及马达24以变更变速比r且满足踩踏相关的预定条件的情况下,控制电动致动器48及马达24,以在马达24驱动的同时或马达24驱动之前,开始第一旋转体及第二旋转体中的至少一者与拨链器22的相对移动。在该变形例中,拨链器22具有电动致动器48。
383.参照图26,对控制部72控制马达24及电动致动器48以变更变速比r的处理进行说明。若电力供给至控制部72,则控制部72开始处理,并进入图26所示的流程图的步骤s201。若图26的流程图结束,则控制部72在规定周期后重复进行从步骤s201开始的处理,直至电力供给停止。
384.在步骤s201中,控制部72判定拨链器22是否动作。例如,在步骤s201中,控制部72执行与图19的步骤s131相同的处理。在拨链器22未动作的情况下,控制部72结束处理。在拨链器22动作的情况下,控制部72进入步骤s202。
385.在步骤s202中,控制部72判定是否满足与踩踏相关的预定条件。在不满足与踩踏相关的预定条件的情况下,控制部72结束处理。在满足与踩踏相关的预定条件的情况下,控制部72进入步骤s203。
386.在步骤s203中,控制部72控制电动致动器48及马达24,以在马达24驱动的同时或马达24驱动之前,开始第一旋转体14及第二旋转体18中的至少一者与拨链器22的相对移动,并进入步骤s204。在步骤s203中,控制部72控制马达24以通过马达24驱动传递体20。
387.在步骤s204中,控制部72判定变速是否完成。在变速未完成的情况下,控制部72进
入步骤s203。在变速完成的情况下,控制部72进入步骤s205。在步骤s205中,控制部72停止马达24对传递体20的驱动并结束处理。
388.·
控制部72只要为如下结构,则可以省略其他结构:构成为在拨链器22动作以变更变速比r的情况下且在满足与踩踏相关的预定条件的情况下,控制马达24以通过马达24驱动传递体20,并构成为在人力驱动车10减速的情况下,控制电动致动器48以使拨链器22的变速档接近预定变速档或者变速比r接近预定变速比r,并构成为在预定变速档与拨链器22的当前变速档的差、或者预定变速比r与当前变速比r的差为预定值以下的情况下,控制电动致动器48以一级级地变更拨链器22的变速档,且构成为若预定变速档与拨链器22的当前变速档的差、或者预定变速比r与当前变速比r的差超过预定值,则控制电动致动器48以使拨链器22跨及多个变速档而连续地动作。在该变形例中,拨链器22具有电动致动器48。
389.参照图27,对控制部72控制马达24及电动致动器48以变更变速比r的处理进行说明。若电力供给至控制部72,则控制部72开始处理并进入图27所示的流程图的步骤s211。若图27的流程图结束,则控制部72在规定周期后重复进行从步骤s211开始的处理,直至电力供给停止。
390.在步骤s211中,控制部72判定拨链器22是否动作。例如,在步骤s211中,控制部72执行与图19的步骤s131相同的处理。在拨链器22未动作的情况下,控制部72结束处理。在拨链器22动作的情况下,控制部72进入步骤s212。
391.在步骤s212中,控制部72判定是否满足与踩踏相关的预定条件。在不满足与踩踏相关的预定条件的情况下,控制部72结束处理。在满足与踩踏相关的预定条件的情况下,控制部72进入步骤s213。
392.在步骤s213中,控制部72判定人力驱动车10是否减速。在人力驱动车10未减速的情况下,控制部72结束处理。在人力驱动车10减速的情况下,控制部72进入步骤s214。
393.在步骤s214中,控制部72判定预定变速档与拨链器22的当前变速档的差、或者预定变速比r与当前变速比r的差是否为预定值以下。在预定变速档与拨链器22的当前变速档的差、或者预定变速比r与当前变速比r的差为预定值以下的情况下,控制部72进入步骤s215。在预定变速档与拨链器22的当前变速档的差、或者预定变速比r与当前变速比r的差不为预定值以下的情况下,控制部72进入步骤s216。
394.在步骤s215中,控制部72控制马达24以通过马达24驱动传递体20,并控制电动致动器48以一级级地变更拨链器22的变速档,然后进入步骤s217。
395.在步骤s216中,控制部72控制马达24以通过马达24驱动传递体20,并控制电动致动器48以使拨链器22跨及多个变速档而连续地动作,然后进入步骤s217。
396.在步骤s217中,控制部72判定变速是否完成。在变速未完成的情况下,控制部72进入步骤s214。在变速完成的情况下,控制部72进入步骤s218。在步骤s218中,控制部72停止马达24对传递体20的驱动并结束处理。
397.·
控制部72只要为如下结构,则可以省略其他结构:构成为在拨链器22动作以变更变速比r的情况下且在满足与踩踏相关的预定条件的情况下,控制马达24以通过马达24驱动传递体20,并构成为,控制电动致动器48,以使在人力驱动车10的车速v为预定的第五速度v5以下时使拨链器22跨及多个变速档动作所需的第五时间t5,小于在人力驱动车10的车速v超过预定的第五速度v5时使拨链器22跨及多个变速档动作所需的第六时间t6。在该
变形例中,拨链器22具有电动致动器48。
398.参照图28,对控制部72控制马达24及电动致动器48以变更变速比r的处理进行说明。若电力供给至控制部72,则控制部72开始处理并进入图28所示的流程图的步骤s221。若图28的流程图结束,则控制部72在规定周期后重复进行从步骤s221开始的处理,直至电力供给停止。
399.在步骤s221中,控制部72判定拨链器22是否动作。例如,在步骤s221中,控制部72执行与图19的步骤s131相同的处理。在拨链器22未动作的情况下,控制部72结束处理。在拨链器22动作的情况下,控制部72进入步骤s222。
400.在步骤s222中,控制部72判定是否满足与踩踏相关的预定条件。在不满足与踩踏相关的预定条件的情况下,控制部72结束处理。在满足与踩踏相关的预定条件的情况下,控制部72进入步骤s223。
401.在步骤s223中,控制部72判定人力驱动车10的车速v是否为预定的第五速度v5以下。在人力驱动车10的车速v为预定的第五速度v5以下的情况下,控制部72进入步骤s224。人力驱动车10的车速v不为预定的第五速度v5以下的情况下,控制部72进入步骤s225。
402.在步骤s224中,控制部72控制马达24以通过马达24驱动传递体20,控制电动致动器48以使第五时间t5小于第六时间t6,然后进入步骤s226。
403.在步骤s225中,控制部72控制马达24以通过马达24驱动传递体20,控制电动致动器48,然后进入步骤s226。
404.在步骤s226中,控制部72判定变速是否完成。在变速未完成的情况下,控制部72进入步骤s223。在变速完成的情况下,控制部72进入步骤s227。在步骤s227中,控制部72停止马达24对传递体20的驱动并结束处理。
405.·
在第一实施方式、第二实施方式、第一实施方式的变形例或第二实施方式的变形例中,可以将图5的步骤s16、步骤s20、及步骤s30中的至少一者的处理省略。将图5的步骤s16、步骤s20、及步骤s30中的至少一者的处理省略时,与被省略处理对应的结构也可以从控制部72的结构中省略。在省略步骤s16的情况下,控制部72若在图5中执行步骤s15的处理,则进入步骤s17,在步骤s17中判定为“否”时,反复执行步骤s17的处理。在省略步骤s20的情况下,在图5的步骤s13中判定为“是”时,控制部72进入步骤s30。在省略步骤s30的情况下,在图5的步骤s20中判定为“是”时,控制部72进入步骤s14。在省略步骤s20及步骤s30的情况下,2在图5的步骤s13中判定为“是”时,控制部72进入步骤s14。在包括第三实施方式或第三实施方式的变形例的实施方式中,可以将图10的步骤s16及步骤s20中的至少一者的处理省略。在将图10的步骤s16及步骤s20中的至少一者的处理省略的情况下,也可以将与被省略的处理对应的结构从控制部72的结构中省略。在省略步骤s16的情况下,若在图10中执行步骤s14的处理时,则控制部72进入步骤s57,在步骤s57中判定为“否”时,重复执行步骤s57的处理。在省略步骤s20的处理的情况下,在图10的步骤s13中判定为“是”时,进入步骤s14。
406.·
包括第一实施方式、第二实施方式、第一实施方式的变形例、第二实施方式的变形例、第三实施方式或第三实施方式的变形例的实施方式中,控制部72并不限定于(a1)、(a2)、(a3)及(a4)结构,只要能控制马达24以通过马达24驱动传递体20即可,可以为任意结构。控制部72也可以通过与(a1)、(a2)、(a3)及(a4)不同的结构,控制马达24以通过马达24
驱动传递体20。作为与(a1)、(a2)、(a3)及(a4)结构不同的结构,控制部72包括以下(a5)、(a6)或(a7)结构。
407.(a5)控制部72构成为,在通过马达24驱动传递体20的情况下,无论变速比r如何,均控制马达24以使传递体20的移动速度保持固定。
408.(a6)控制部72构成为,无论变速比r如何,均控制马达24以使传递体20的移动速度在移动开始后一直增加。
409.(a7)控制部72构成为,无论变速比r如何,均控制马达24以使传递体20的移动速度在移动开始后增加,然后保持固定速度。
410.例如,在第一实施方式、第二实施方式、第一实施方式的变形例或第二实施方式的变形例中,在图5的步骤s14中,控制部72也可以通过与(a1)、(a2)、(a3)及(a4)不同的结构,控制马达24以通过马达24驱动传递体20。例如,在包括第三实施方式或第三实施方式的变形例的实施方式中,在图10的步骤s14中,控制部72可以通过与(a1)、(a2)、(a3)及(a4)不同的结构,控制马达24以通过马达24驱动传递体20。
411.·
在第一实施方式、第二实施方式、第一实施方式的变形例或第二实施方式的变形例中,也可以将图5的步骤s16、步骤s20、及步骤s30中的至少一者的处理省略,且在图5的步骤s14中,控制部72通过与(a1)、(a2)、(a3)及(a4)不同的结构,控制马达24以通过马达24驱动传递体20。将图5的步骤s16、步骤s20、及步骤s30中的至少一者的处理省略的情况下,也可以将与被省略处理对应的结构从控制部72的结构中省略。
412.·
在包括第三实施方式或第三实施方式的变形例的实施方式中,也可以将图10的步骤s16及步骤s20中的至少一者的处理省略,且在图10的步骤s14中,控制部72通过与(a1)、(a2)、(a3)及(a4)不同的结构,控制马达24以通过马达24驱动传递体20。在将图10的步骤s16及步骤s20中的至少一者的处理省略的情况下,也可以将与被省略处理对应的结构从控制部72的结构中省略。与(a1)、(a2)、(a3)及(a4)不同的结构可以是(a5)、(a6)或(a7)结构,也可以是其他结构。在该变形例中,构成为,动力传递系统60的马达24驱动传递体20,并且通过驱动传递体20而发电,蓄电装置66蓄积由马达24发电产生的电力,控制装置70使用蓄电装置66的电力来控制马达24。由此,能够适当地变更变速比r。
413.·
在第一实施方式、第二实施方式、第一实施方式的变形例或第二实施方式的变形例中,可以将图5的步骤s16、步骤s20、及步骤s30中的至少一者的处理省略。在将图5的步骤s16、步骤s20、及步骤s30中的至少一者的处理省略的情况下,也可以将与被省略处理对应的结构从控制部72的结构中省略。在该变形例中,控制部72构成为,在拨链器22的多个变速档中,第一转速n1落入预定范围的情况下,控制电动致动器48,以变成多个变速档中变速比r最大的变速档。在该变形例中,在图5的步骤s15中,控制部72在拨链器22的多个变速档中,第一转速n1落入预定范围的情况下,控制电动致动器48,以变成多个变速档中变速比r最大的变速档,从而能够适当地变更变速比r。
414.·
在第一实施方式、第二实施方式、第一实施方式的变形例或第二实施方式的变形例中,可以将图5的步骤s16及步骤s20中的至少一者的处理省略。在将图5的步骤s16及步骤s20中的至少一者的处理省略的情况下,也可以将与被省略处理对应的结构从控制部72的结构中省略。在该变形例中,控制部72构成为,在通过电动致动器48使拨链器22动作以变更变速比r的情况下且在满足与踩踏相关的预定条件的情况下,控制马达24以驱动传递体
20,并构成为,在人力驱动车10的车速v为第二速度v2以上、或者车轮16的转速nw为预定转速nwx以上的情况下,控制电动致动器48以使变速比r不增大。由此,能够适当地变更变速比r。在图5的步骤s30中,控制部72判定人力驱动车10的车速v是否为第二速度v2以上、或者车轮16的转速nw是否为预定转速nwx以上且目标变速比r是否小于当前变速比r。在该变形例中,控制部72可以构成为,在人力驱动车10的车速v为第二速度v2以上且车轮16的转速nw为预定转速nwx以上的情况下,控制电动致动器48以使变速比r不增大。在人力驱动车10的车速v为第二速度v2以上、或者车轮16的转速nw为预定转速nwx以上的情况下,控制部72不向电动致动器48输出第一变速控制信号。在图5的步骤s30中,在人力驱动车10的车速v为第二速度v2以上、或者车轮16的转速nw为预定转速nwx以上,且用于增大变速比r的变速执行条件成立的情况下,控制部72结束处理。
415.·
在第一实施方式、第二实施方式、第一实施方式的变形例或第二实施方式的变形例中,可以将图5的步骤s16及步骤s20中的至少一者的处理省略。在将图5的步骤s16及步骤s20中的至少一者的处理省略的情况下,也可以将与被省略处理对应的结构从控制部72的结构中省略。在该变形例中,控制部72构成为,在通过电动致动器48使拨链器22动作以变更变速比r的情况下且在满足与踩踏相关的预定条件的情况下,控制马达24以驱动传递体20,且构成为,在拨链器22动作的情况下,控制电动致动器48以在满足与变速相关的第一条件之前不变更变速比r。由此,能够适当地变更变速比r。在当拨链器22动作的情况下,满足与变速相关的第一条件之前,控制部72不向电动致动器48输出变速控制信号。在图5的步骤s30中,在拨链器22动作且不满足变速相关的第一条件的情况下,控制部72结束处理。
416.·
在第一实施方式、第二实施方式、第一实施方式的变形例或第二实施方式的变形例中,可以将图5的步骤s16及步骤s20中的至少一者的处理省略。在将图5的步骤s16及步骤s20中的至少一者的的处理省略的情况下,也可以将与被省略处理对应的结构从控制部72的结构中省略。在该变形例中,控制部72构成为,在通过电动致动器48使拨链器22动作以变更变速比r的情况下且在满足与踩踏相关的预定条件的情况下,控制马达24以驱动传递体20,且构成为,在控制电动致动器48及马达24以使变速比r在预定的第三时间t3内增减预定次数以上的情况下,控制电动致动器48以在满足与变速相关的第二条件之前,拨链器22不变更变速比r。由此,能够适当地变更变速比r。
417.在控制电动致动器48及马达24以使变速比r在预定的第三时间t3内增减预定次数以上的情况下,在满足与变速相关的第二条件之前,控制部72不向电动致动器48输出变速控制信号。在步骤s30中,在控制电动致动器48及马达24以使变速比r在预定的第三时间t3内增减预定次数以上的情况下,且在不满足与变速相关的第二条件的情况下,控制部72结束处理。
418.·
在第一实施方式、第二实施方式、第一实施方式的变形例或第二实施方式的变形例中,也可以将图5的步骤s16、步骤s20、及步骤s30中的至少一者的处理省略。在将图5的步骤s16、步骤s20、及步骤s30中的至少一者的处理省略的情况下,也可以将与被省略处理对应的结构从控制部72的结构中省略。在该变形例中,控制部72构成为,在控制电动致动器48及马达24变更变速比r的情况下且在满足与踩踏相关的预定条件的情况下,控制电动致动器48及马达24,以在马达24驱动的同时或马达24驱动之前,开始第一旋转体14及第二旋转体18中的至少一者与拨链器22的相对移动。由此,能够适当地变更变速比r。在该变形例
中,优选为,在图5中,在步骤s14中,控制部72控制马达24,以在步骤s15中电动致动器48动作之前马达24不驱动。
419.·
在第一实施方式、第二实施方式、第一实施方式的变形例或第二实施方式的变形例中,可以将图5的步骤s16、步骤s20、及步骤s30至少一者的处理省略。在将图5的步骤s16、步骤s20、及步骤s30至少一者的处理省略的情况下,也可以将与被省略处理对应的结构从控制部72的结构中省略。在该变形例中,控制部72构成为,在人力驱动车10减速的情况下,控制电动致动器48,以使拨链器22的变速档接近预定变速档或者变速比r接近预定变速比rx,并构成为,在预定变速档与拨链器22的当前变速档的差、或者预定变速比r与当前变速比r的差为预定值以下的情况下,控制电动致动器48,以一级级地变更拨链器22的变速档,且构成为,若预定变速档与拨链器22的当前变速档的差、或者预定变速比r与当前变速比r的差超过预定值,则控制电动致动器48,以使拨链器22跨及多个变速档而连续地动作。由此,能够适当地变更变速比r。
420.在该变形例中,控制部72构成为,在步骤s11中,当人力驱动车10减速时,判定变速执行条件成立,在步骤s15中,控制电动致动器48,以使拨链器22的变速档接近预定变速档或者变速比r接近预定变速比rx,并构成为,在预定变速档与拨链器22的当前变速档的差、或者预定变速比r与当前变速比r的差为预定值以下的情况下,控制电动致动器48以一级级地变更拨链器22的变速档,且构成为,若预定变速档与拨链器22的当前变速档的差、或者预定变速比r与当前变速比r的差超过预定值,则控制电动致动器以使拨链器22跨及多个变速档而连续地动作。在步骤s11中,控制部72例如也可以在与人力驱动车10的行进方向对应的方向上的减速度大于预定减速度的情况下,判定变速执行条件成立。
421.·
在第一实施方式、第二实施方式、第一实施方式的变形例或第二实施方式的变形例中,可以将图5的步骤s16、步骤s20、及步骤s30中的至少一者的处理省略。在将图5的步骤s16、步骤s20、及步骤s30中的至少一者的处理省略的情况下,也可以将与被省略处理对应的结构从控制部72的结构中省略。在该变形例中,控制部72构成为,控制电动致动器48,以使人力驱动车10的车速v为预定的第五速度v5以下时使拨链器22跨及多个变速档动作所需的第五时间t5,小于人力驱动车10的车速v超过预定的第五速度v5时使拨链器22跨及多个变速档动作所需的第六时间t6。
422.在该变形例中,在图5的步骤s15中,控制电动致动器48,以使人力驱动车10的车速v为预定的第五速度v5以下时使拨链器22跨及多个变速档动作所需的第五时间t5,小于人力驱动车10的车速v超过预定的第五速度v5时使拨链器22跨及多个变速档动作所需的第六时间t6。由此,能够适当地变更变速比r。
423.·
在第一实施方式、第二实施方式、第一实施方式的变形例或第二实施方式的变形例中,控制部72也可以执行图6的流程图的处理,省略图5的流程图的所有处理。在将图5的处理省略的情况下,也可以将与被省略处理对应的结构控制部72的结构中省略。在该变形例中,控制装置70包括控制部72,该控制部72构成为控制电动致动器48及马达24,并接收用于调整拨链器22的位置的信号。控制部72构成为,在接收用于调整拨链器22的位置的信号的情况下,控制马达24以驱动马达24,并构成为,在与马达24的转速及车轮16的转速nw对应的第一变速比r1与拨链器22的当前位置不对应的情况下,控制电动致动器48以使拨链器22的位置与第一变速比r1对应。由此,能够适当地变更变速比r。
424.·
在第一实施方式、第二实施方式、第一实施方式的变形例或第二实施方式的变形例中,控制部72可以省略图5的流程图的所有处理及图6的流程图的所有处理。在将图5的处理省略的情况下,也可以将与被省略处理对应的结构从控制部72的结构中省略。在该变形例中,控制部72构成为使用蓄电装置66的电力来控制电动致动器48。由此,能够适当地变更变速比r。
425.·
在第一实施方式、第二实施方式、第一实施方式的变形例或第二实施方式的变形例中,控制部72也可以将图5的流程图中的步骤s13的处理省略。在将图5的步骤s13的处理省略的情况下,也可以将与被省略处理对应的结构从控制部72的结构中省略。在该情况下,在图5的流程图中,在步骤s10中判定为“是”的情况下,控制部72可以进入步骤s20,也可以进入步骤s19。在图5的流程图中,控制部72在执行步骤s12的处理后,根据与踩踏相关的预定条件不同的条件,进入步骤s20或步骤s19中的任意一者。
426.进而,在该变形例中,可以将图5的步骤s16、步骤s20、及步骤s30中的至少一者的处理省略,且在图5的步骤s14中,控制部72可以通过与(a1)、(a2)、(a3)及(a4)不同的结构,控制马达24以通过马达24驱动传递体20。在第三实施方式或第三实施方式的变形例中,控制部72在图10的流程图中可以将步骤s13的处理省略。在将图10的步骤s13的处理省略的情况下,也可以将与被省略处理对应的结构从控制部72的结构中省略。在该情况下,在图10的流程图中,在步骤s51中判定为“是”的情况下,控制部72进入步骤s20。
427.在将图10的流程图的步骤s13省略的变形例中,进一步省略图10的步骤s16及步骤s20中的至少一者的处理,且在图10的步骤s14中,控制部72可以通过与(a1)、(a2)、(a3)及(a4)不同的结构,控制马达24以通过马达24驱动传递体20。在将图5的步骤s13的处理省略的变形例、和将图10的步骤s13的处理省略时的变形例中,构成为,动力传递系统60的马达24驱动传递体20,并通过驱动传递体20而发电,蓄电装置66蓄积通过马达24发电产生的电力,控制装置70使用蓄电装置66的电力来控制马达24。由此,能够适当地变更变速比r。
428.·
在第一实施方式、第二实施方式、第一实施方式的变形例或第二实施方式的变形例中,马达24也可以构成为根据人力驱动力h不对人力驱动车10施加推进力。
429.·
在第一实施方式、第二实施方式、第一实施方式的变形例或第二实施方式的变形例中,可以代替图5的流程图的步骤s17的处理,控制部72判定是否在驱动马达24后经过了预定时间。与预定时间t相关的信息存储于存储部74。若驱动马达24后经过了预定时间t,则控制部72进入步骤s18。预定时间t可以固定,也可以根据当前变速比r与目标变速比r中的至少一者而变更。与预定时间t相关的信息存储于存储部74。
430.控制部72重复步骤s17的处理,直至在驱动马达24后经过预定时间t。在第三实施方式或第三实施方式的变形例中,可以代替图10的流程图的步骤s57的处理,控制部72判定驱动马达24后是否经过了预定时间。若驱动马达24后经过了预定时间t,则控制部72进入步骤s18。预定时间t可以固定,也可以根据当前变速比r与目标变速比r中的至少一者而变更。控制部72重复步骤s57的处理,直至在驱动马达24后经过预定时间t。
431.本说明书中所使用的“至少一者”这种表述是指所需选项为“一个以上”。作为一例,若选项数量为两个,则本说明书中所使用的“至少一者”是指“仅一个选项”或“两个选项这两者”。作为其他示例,若选项数量为三个,则本说明书中所使用的“至少一者”是指“仅一个选项”或“两个以上的任意选项的组合”。
432.符号说明:
433.10人力驱动车;
434.12曲柄轴;
435.16车轮;
436.14第一旋转体;
437.18第二旋转体;
438.20传递体;
439.22拨链器;
440.24马达;
441.44第一操作装置;
442.44a第一操作部;
443.45第二操作装置;
444.48电动致动器;
445.60动力传递系统;
446.62第一单向离合器;
447.64第二单向离合器;
448.66蓄电装置;
449.70控制装置;
450.72控制部;
451.84第一检测部;
452.92变速操作装置。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。