1.本发明涉及遥感卫星数据处理技术领域,特别是一种多光谱影像逐像元观测几何重构方法及装置。
背景技术:
2.目前,国产陆地观测卫星除一颗静止卫星外,其余卫星的多光谱载荷均为扫描式。一般情况下,大幅宽多光谱载荷如hj1a/b-ccd、gf6-wfv、cb04a-wfi都提供了覆盖整景的观测几何信息,其它幅宽相对比较窄的载荷数据仅提供景中心成像几何,缺少其它像元的成像几何,许多应用场景中,需要用到其它像元的观测几何。如绝对辐射定标时,因定标场与景中心并不重合,需要确定其观测几何;定量反演更是需要逐像元的观测几何。用户常采用景中心观测几何替代全景影像其它像元点观测几何,在影像幅宽不大时,观测几何带来的定标定量的变化可以忽略不计,随着幅宽的增大,观测几何的变化引起的变化已经不容忽视,基于现有条件重构影像所有像元的观测几何成为进一步提升定标定量精度的一个关键点。
3.针对对外分发的遥感影像元数据中缺少卫星成像时刻的精轨参数,无法根据严格的物理模型解算逐像元点的观测几何。
技术实现要素:
4.本发明解决的技术问题是:克服现有技术的不足,提供了一种多光谱影像逐像元观测几何重构方法及装置。
5.本发明的技术解决方案是:
6.第一方面,本发明实施例提供了一种多光谱影像逐像元观测几何重构方法,包括:
7.获取卫星影像对应的景的四个角点的角点坐标、所述四个角点对应的外边框线、及与所述外边框线中的第一外边框线平行的第一直线;
8.获取所述景对应的目标点位的平面坐标、卫星位置与地球球心的连线与地面的交点、所述景的景中心点沿轨方向直线与所述第一直线的第一交叉点、及所述卫星位置与所述沿轨方向直线的第二交叉点;所述卫星位置与所述第二交叉点连接的直线与所述沿轨方向直线相互垂直;
9.根据所述第一直线对应的直线方程、所述交点、所述外边线框对应的边线框方程、所述第一交叉点、所述第二交叉点和卫星轨道高度,对所述卫星影像进行观测几何重构。
10.可选地,所述根据所述第一直线对应的直线方程、所述外边线框对应的边线框方程、所述第一交叉点、所述第二交叉点和卫星轨道高度,对所述卫星影像进行观测几何重构,包括:
11.根据所述直线方程、所述边线框方程和所述卫星轨道高度,获取所述交点与所述第一交叉点之间的第一距离、所述交点与所述第二交叉点之间的第二距离、及所述第一交叉点与所述第二交叉点之间的第三距离;
12.根据所述第一距离、所述第二距离和所述第三距离,对所述卫星影像的观测视场角、观测天顶角和观测方位角进行观测几何重构。
13.可选地,所述根据所述第一距离、所述第二距离和所述第三距离,对所述卫星影像的观测视场角、观测天顶角和观测方位角进行观测几何重构,包括:
14.根据所述第三距离,计算得到所述第二交叉点的交叉点坐标;
15.根据所述交叉点坐标和两点距离公式,计算得到所述卫星的投影点与所述卫星影像对应的成像点位之间的第四距离、所述卫星位置与所述交点之间的第五距离、及所述成像点位与所述卫星位置之间的圆心角;
16.根据所述第四距离和所述第五距离,计算得到所述卫星影像的观测视场角;
17.根据所述第四距离、所述第五距离和所述圆心角,计算得到所述卫星影像的观测天顶角;
18.根据所述第二距离和所述第四距离,计算得到所述卫星影像的观测方位角。
19.可选地,所述根据所述第二距离和所述第四距离,计算得到所述卫星影像的观测方位角,包括:
20.根据所述第二距离和所述第四距离,计算得到以所述第一交叉点为坐标中心的第一方位角;
21.获取以所述成像点位为坐标中心的第二方位角;
22.获取所述第一方位角和所述第二方位角之间的方位角差值;
23.根据所述第一方位角和所述方位角差值,计算得到所述卫星影像的观测方位角。
24.第二方面,本发明实施例提供了一种多光谱影像逐像元观测几何重构装置,包括:
25.第一直线获取模块,用于获取卫星影像对应的景的四个角点的角点坐标、所述四个角点对应的外边框线、及与所述外边框线中的第一外边框线平行的第一直线;
26.交叉点获取模块,用于获取所述景对应的目标点位的平面坐标、卫星位置与地球球心的连线与地面的交点、所述景的景中心点沿轨方向直线与所述第一直线的第一交叉点、及所述卫星位置与所述沿轨方向直线的第二交叉点;所述卫星位置与所述第二交叉点连接的直线与所述沿轨方向直线相互垂直;
27.观测几何重构模块,用于根据所述第一直线对应的直线方程、所述交点、所述外边线框对应的边线框方程、所述第一交叉点、所述第二交叉点和卫星轨道高度,对所述卫星影像进行观测几何重构。
28.可选地,所述观测几何重构模块包括:
29.距离获取单元,用于根据所述直线方程、所述边线框方程和所述卫星轨道高度,获取所述交点与所述第一交叉点之间的第一距离、所述交点与所述第二交叉点之间的第二距离、及所述第一交叉点与所述第二交叉点之间的第三距离;
30.观测几何重构单元,用于根据所述第一距离、所述第二距离和所述第三距离,对所述卫星影像的观测视场角、观测天顶角和观测方位角进行观测几何重构。
31.可选地,所述观测几何重构单元包括:
32.交叉点坐标计算子单元,用于根据所述第三距离,计算得到所述第二交叉点的交叉点坐标;
33.圆心角计算子单元,用于根据所述交叉点坐标和两点距离公式,计算得到所述卫
星的投影点与所述卫星影像对应的成像点位之间的第四距离、所述卫星位置与所述交点之间的第五距离、及所述成像点位与所述卫星位置之间的圆心角;
34.观测视场角计算子单元,用于根据所述第四距离和所述第五距离,计算得到所述卫星影像的观测视场角;
35.观测天顶角计算子单元,用于根据所述第四距离、所述第五距离和所述圆心角,计算得到所述卫星影像的观测天顶角;
36.观测方位角计算子单元,用于根据所述第二距离和所述第四距离,计算得到所述卫星影像的观测方位角。
37.可选地,所述观测方位角计算子单元包括:
38.第一方位角计算子单元,用于根据所述第二距离和所述第四距离,计算得到以所述第一交叉点为坐标中心的第一方位角;
39.第二方位角计算子单元,用于获取以所述成像点位为坐标中心的第二方位角;
40.方位角差值获取子单元,用于获取所述第一方位角和所述第二方位角之间的方位角差值;
41.观测方位角获取子单元,用于根据所述第一方位角和所述方位角差值,计算得到所述卫星影像的观测方位角。
42.本发明与现有技术相比的优点在于:
43.本发明实施例根据卫星的基本参数,如卫星轨道高度、景中心观测天顶角、方位角等信息,对卫星影像进行逐像元的观测几何重构,相对采用景中心观测方法来替代景内逐像元的方式,采用本方案可以极大地提升影像逐像元的观测几何精度,从而影响定标定量应用。
附图说明
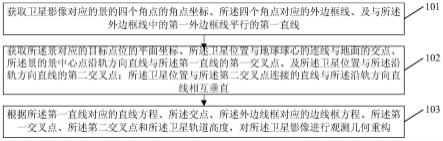
44.图1为本发明实施例提供的一种多光谱影像逐像元观测几何重构方法的步骤流程图;
45.图2为本发明实施例提供的一种地球等效球体的投影的示意图;
46.图3为本发明实施例提供的一种四个方位的示意图;
47.图4为本发明实施例提供的一种卫星观测天顶角修正原理的示意图;
48.图5为本发明实施例提供的一种多光谱影像逐像元观测几何重构装置的结构示意图。
具体实施方式
49.实施例一
50.参照图1,示出了本发明实施例提供的一种多光谱影像逐像元观测几何重构方法的步骤流程图,如图1所示,该多光谱影像逐像元观测几何重构方法可以包括以下步骤:
51.步骤101:获取卫星影像对应的景的四个角点的角点坐标、所述四个角点对应的外边框线、及与所述外边框线中的第一外边框线平行的第一直线。
52.在本实施例中,在对卫星影像进行观测几何重构时,可以获取卫星影像对应的景的四个角点的角点坐标、四个角点对应的外边框线、以及与外边框线中的第一外边框线平
行的第一直线。
53.在获取到卫星影像对应的景的四个角点的角点坐标、四个角点对应的外边框线、及与外边框线中的第一外边框线平行的第一直线之后,执行步骤102。
54.步骤102:获取所述景对应的目标点位的平面坐标、卫星位置与地球球心的连线与地面的交点、所述景的景中心点沿轨方向直线与所述第一直线的第一交叉点、及所述卫星位置与所述沿轨方向直线的第二交叉点;所述卫星位置与所述第二交叉点连接的直线与所述沿轨方向直线相互垂直。
55.在获取到上述参数之后,可以获取景对应的目标点位的平面坐标、卫星位置与地球球形的连线与地面的交点、景的景中心点沿轨方向直线与第一直线的第一交叉点、卫星位置与沿轨方向直线的第二交叉点、其中,卫星位置与第二交叉点连接的直线与沿轨方向直线相互垂直。
56.步骤103:根据所述第一直线对应的直线方程、所述交点、所述外边线框对应的边线框方程、所述第一交叉点、所述第二交叉点和卫星轨道高度,对所述卫星影像进行观测几何重构。
57.在得到直线方程、交点、外边线框、第一交叉点、第二交叉点之后,可以根据第一直线对应的直线方程、交点、外边线框、第一交叉点、第二交叉点和卫星轨道高度对卫星影像进行观测几何重构。具体地,可以根据直线方程、边线框方程和卫星轨道高度,获取交点与第一交叉点之间的第一距离、交点与第二交叉点之间的第二距离、及第一交叉点与第二交叉点之间的第三距离,并根据第一距离、第二距离和第三距离,对卫星影像的观测视场角、观测天顶角和观测方位角进行观测几何重构。
58.对于该过程可以结合下述具体实现方式进行详细描述。
59.在本发明的一种具体实现方式中,观测几何重构的方法可以包括以下步骤:
60.步骤s1:根据所述第三距离,计算得到所述第二交叉点的交叉点坐标。
61.在本实施例中,在得到第三距离之后,可以根据第三距离计算得到第二交叉点的交叉点坐标。
62.在计算得到第二交叉点的交叉点坐标之后,执行步骤s2。
63.步骤s2:根据所述交叉点坐标和两点距离公式,计算得到所述卫星的投影点与所述卫星影像对应的成像点位之间的第四距离、所述卫星位置与所述交点之间的第五距离、及所述成像点位与所述卫星位置之间的圆心角。
64.在计算得到第二交叉点的交叉点坐标之后,可以根据交叉点坐标和两点距离公式,计算得到卫星的头影像与卫星影像对应的成像点位之间的第四距离、卫星位置与交点之间的第五距离,以及成像点位与卫星位置之间的圆心角
65.步骤s3:根据所述第四距离和所述第五距离,计算得到所述卫星影像的观测视场角。
66.在计算得到第四距离和第五距离之后,可以根据第四距离和第五距离,计算得到卫星影像的观测视场角。
67.步骤s4:根据所述第四距离、所述第五距离和所述圆心角,计算得到所述卫星影像的观测天顶角。
68.在得到第四距离、第五距离和圆心角之后,可以根据第四距离、第五距离和圆心角
计算得到卫星影像的观测天顶角。
69.步骤s5:根据所述第二距离和所述第四距离,计算得到所述卫星影像的观测方位角。
70.在得到第二距离和第四距离之后,可以根据第二距离和第四距离计算得到卫星影像的观测方位角。具体地,可以根据第二距离和第四距离,计算得到以第一交叉点为坐标中心点的第一方位角,获取以成像点位为坐标中心的第二方位角。在得到第一方位角和第二方位角之后,可以计算第一方位角与第二方位角之间的方位角差值,进而可以根据第一方位角和方位角差值计算得到卫星影像的观测方位角。
71.对于本发明技术方案的具体实现过程可以结合图2~图4以及下述公式进行详细描述。
72.像元的观测天顶角是指卫星传感器与像元的连线和像元地平面法线所成的夹角。如图2所示,图中的圆表示地球等效球体的投影,点v为卫星位置,v1为卫星与地心连线在地面的交点,即卫星在地面的投影点,s点为成像点位,o为地球球心。则图中∠z为点s的观测天顶角,∠o为s点与卫星之间的圆心角,∠z1为卫星观测s点的视场角。由三角函数关系可得知:
73.∠z=∠o ∠z1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
74.设定卫星轨道高度为l
vv1
,地球半径为re,则有:
75.sin(z)*re=sin(z1)*(re l
vv1
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
76.像元的观测方位角是由正北方向起,顺时针转至某个时刻卫星和像元连线在地表的投影所在的射线,顶点为地表像元点,旋转的角度即像元的方位角。如图3所示:图中lone/lonw/lats/latn分别为东南西北四个方位,v/v1/s/o与图2相同,v/s其在平面的投影分别为v2/s1,则s点的观测方位角为自正北始,顺时针转到射线s1v2的角度,即a。
77.设定图4中的abde分别为景的左上、右上、左下、右下四个角点,连接ab、ad、eb、ed形成影像的外边框。令过ab的直线为l0,过ad的直线为l2。s为目标点位,fg为平行于l0且过s点的直线l1,c为景中心点在沿轨方向直线l3与fg的交叉点,过c点且南北方向的直线为hi。v为卫星所在位置,v1为卫星在地表的投影点,o1为卫星v在fg上的垂线与fg的交叉点。连接vo1、vc、vs。
78.作如下约定:记图中各点的平面坐标以下标表示,如s点的平面坐标xs、ys,以此类推。
79.abcde各点的经纬度均可从影像中获取,目标点位的经纬度点为已知,线段vv1的长度l
vv1
为卫星轨道高度。
80.卫星景中心观测视场角为z2=∠v1vc,景中心的天顶角和方位角可从影像的元数据中获取,则z2可求出。
81.令z1,z,a为s点位的观测视场角,观测天顶角,观测方位角。
82.观测天顶角修正的关键在于获取圆心角,其实质在获取s/v1两点的大圆弧长,其中s点坐标已知,v1点未知,可通过景中心的观测几何信息计算得出。
83.其中,观测天顶角和观测视场角的修正方法可以包括以下步骤:
84.1、将球面经纬度坐标转化到公里网坐标,投影原始坐标系数为wgs84坐标系,目标坐标系为utm投影坐标系,其带号依目标点位经纬度可确立,即可获取图中所有已知点的平
面坐标;
85.2、直线l1与l0平行,即斜率一致,直线l1可以以y=kx b表示,代入ab两点平面坐标,可求得k,再代入s坐标可求得b;其角度为θ=arctan(k)/π*180,记a2为以北向为x轴正向,东向为y轴正向的坐标时的θ角度,即a2=∠hcg,即a2=90-θ;
86.3、直线l2与直线l3平行,其中l2以y=cx d表示,代入ad两点坐标,则c、d为已知;
87.4、直线l3可以表示成y=cx d1,直线l3过景中心,可求得d1;
88.5、l1和l3的直线方程均已得出,可求出c点的坐标:xc=(d1-b)/(k-c),yc=k*xc b;
89.6、依据三角函数关系,可以得出v1、c、o1任意两点间的距离,首先可得:l
v1c
=tan(z1)*l
v1v
,记a3为景中心观测方位角a与直线l1夹角的锐角,则当a小于180时,a3=a-a2,当a大于180时,a3=a-a2-180;则l
v1c
=tan(z1)*l
v1v
,l
v1v
,z1为已知,则l
v1c
、l
v1o1
、l
co1
均可计算得出。
90.7、计算o1点坐标。c点o1点均位于直线l1上,满足yc=k*xc b,同时有y
o1
=k*x
o1
b,将两式相减,代入步骤8中的公式l
co1
,可得式中所有参量均为已知。当a《180度时,点o1位于c右侧,即取正值,否则点o1位于c的左侧,取负值;同时根据y
o1
=k*x
o1
b,可求取o1点的纵坐标。
91.8、如果根据两点距离公式,可求得从而可得:则s点与卫星之间的圆心角∠o满足:l
v1s
/2/π/le=∠o/360。
92.9、由直角三角函数可知,将步骤10中的l
v1s
与l
v1v
代入此式中,可求得z2,即为修正后的观测视场角,继续引入步骤8中的圆心角,即可解算s点的天顶角z。
93.对于观测方位角的修正方式可以包括以下步骤:
94.10、由直角三角函数可知,将步骤7中的l
v1o1
与步骤8中的l
so1
分别代入此式中,可求得a4;
95.11、则a2 a4即是c点为坐标中心的方位角,以s点为中心的方位角与以c为中心的方位角相差lon
s-lonc,即s点的方位角为a=a2 a4-(lon
s-lonc)。
96.为了验证上述方案的效果,进行如下测试:
97.1)测试数据的基本情况
98.由于多光谱影像不提供逐像元的观测几何,故采用高光谱影像的观测几何数据作为测试数据,说明其有效性。共采用三景数据进行测试,分别为:zy1 f卫星131871、132005产品以及gf5b卫星的87156号产品。记其序号分别为1、2和3。
99.2)测试方法描述
100.以图像的最大点为例,以影像ogp文件中四角点的天顶角、方位角作为真值lr,本专利方法重构结果为验证值l,通过其相对误差,计算公式为:
[0101][0102]
以相对误差在5%以内作为算法有效性的评价依据。
[0103]
3)测试过程描述
[0104]
测试数据的景中心基本信息如下表1所示,该信息均从影像元数据中获取。
[0105]
表1:
[0106]
序号经度纬度太阳天顶角太阳方位角观测天顶角观测方位角1122.942941.940949.9187158.50453.5564278.44262103.225126.390335.0591143.80160.0433193.0071394.773142.160152.3226155.92260.0648194.0798
[0107]
理论而言,影像的四角点是卫星视场最大的点,即误差最大的点。本方法将以每景影像的四角点作为测试项。从影像元数据中取出四角点坐标,分别读取卫星精轨数据处理得到的观测天顶角、方位角,利用本实施例的方法计算天顶角和方位角,分别计算绝对误差和相对误差如下表2所示。
[0108]
表2:
[0109][0110]
误差分析结果如下述表3所示:
[0111]
表3:
[0112][0113][0114]
经过上述表3可知,天顶角的最大相对误差为3.68%,绝对误差最大值为0.12度。方位角的最大相对误差为4.52%,绝对误差最大值为4.92度。考虑到无精轨数据的前提、对地球球体的近似考虑等,本算法误差和精轨数据相比,误差在可接受范围内。相对采用景中心观测方法来替代景内逐像元的方式,采用本实施例提供的方案可以极大地提升影像逐像元的观测几何精度,从而影响定标定量应用。
[0115]
实施例二
[0116]
参照图5,示出了本发明实施例提供的一种多光谱影像逐像元观测几何重构装置的结构示意图,如图5所示,该多光谱影像逐像元观测几何重构装置可以包括以下模块:
[0117]
第一直线获取模块510,用于获取卫星影像对应的景的四个角点的角点坐标、所述四个角点对应的外边框线、及与所述外边框线中的第一外边框线平行的第一直线;
[0118]
交叉点获取模块520,用于获取所述景对应的目标点位的平面坐标、卫星位置与地球球心的连线与地面的交点、所述景的景中心点沿轨方向直线与所述第一直线的第一交叉点、及所述卫星位置与所述沿轨方向直线的第二交叉点;所述卫星位置与所述第二交叉点连接的直线与所述沿轨方向直线相互垂直;
[0119]
观测几何重构模块530,用于根据所述第一直线对应的直线方程、所述交点、所述外边线框对应的边线框方程、所述第一交叉点、所述第二交叉点和卫星轨道高度,对所述卫星影像进行观测几何重构。
[0120]
可选地,所述观测几何重构模块包括:
[0121]
距离获取单元,用于根据所述直线方程、所述边线框方程和所述卫星轨道高度,获
取所述交点与所述第一交叉点之间的第一距离、所述交点与所述第二交叉点之间的第二距离、及所述第一交叉点与所述第二交叉点之间的第三距离;
[0122]
观测几何重构单元,用于根据所述第一距离、所述第二距离和所述第三距离,对所述卫星影像的观测视场角、观测天顶角和观测方位角进行观测几何重构。
[0123]
可选地,所述观测几何重构单元包括:
[0124]
交叉点坐标计算子单元,用于根据所述第三距离,计算得到所述第二交叉点的交叉点坐标;
[0125]
圆心角计算子单元,用于根据所述交叉点坐标和两点距离公式,计算得到所述卫星的投影点与所述卫星影像对应的成像点位之间的第四距离、所述卫星位置与所述交点之间的第五距离、及所述成像点位与所述卫星位置之间的圆心角;
[0126]
观测视场角计算子单元,用于根据所述第四距离和所述第五距离,计算得到所述卫星影像的观测视场角;
[0127]
观测天顶角计算子单元,用于根据所述第四距离、所述第五距离和所述圆心角,计算得到所述卫星影像的观测天顶角;
[0128]
观测方位角计算子单元,用于根据所述第二距离和所述第四距离,计算得到所述卫星影像的观测方位角。
[0129]
可选地,所述观测方位角计算子单元包括:
[0130]
第一方位角计算子单元,用于根据所述第二距离和所述第四距离,计算得到以所述第一交叉点为坐标中心的第一方位角;
[0131]
第二方位角计算子单元,用于获取以所述成像点位为坐标中心的第二方位角;
[0132]
方位角差值获取子单元,用于获取所述第一方位角和所述第二方位角之间的方位角差值;
[0133]
观测方位角获取子单元,用于根据所述第一方位角和所述方位角差值,计算得到所述卫星影像的观测方位角。
[0134]
本技术所述具体实施方式可以使本领域的技术人员更全面地理解本技术,但不以任何方式限制本技术。因此,本领域技术人员应当理解,仍然对本技术进行修改或者等同替换;而一切不脱离本技术的精神和技术实质的技术方案及其改进,均应涵盖在本技术专利的保护范围中。
[0135]
本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。