1.本发明涉及航天器设计与仿真技术领域,具体地,涉及航天器多圈能量平衡设计方法及系统。
背景技术:
2.航天器的能源形式主要有锌银蓄电池、氢氧燃料电池、同位素温差电池、太阳阵-锂离子蓄电池组等。目前使用最为广泛的为太阳阵-锂离子蓄电池组,基于砷化镓等太阳电池片,利用光伏效应将太阳能转化为电能,并由蓄电池组在光照期储存富余的电能、在阴影期或大功率时提供电能。
3.采用太阳阵-锂离子蓄电池组为能源形式的航天器,需要根据轨道参数、负载功耗等一系列因素,进行能量平衡分析与计算,以便确定所需的太阳阵、蓄电池组的串并联数。
4.传统的航天器一般要求能量当圈平衡,即轨道环绕一圈,可给蓄电池充电的电量大于等于蓄电池消耗的电量。随着航天器任务的多样化、有效载荷的高功率化,航天器短期功率日益增加,若仍要求当圈能量平衡,所需的太阳阵的面积重量、蓄电池组的体积重量都需要随之增加。受限于运载能力,航天器的体积、重量不能无限增加,当所需的太阳阵的面积重量、蓄电池组的体积重量超出允许范围时,就得通过调整在轨工作模式,进行多圈能量平衡设计,以求缩减太阳阵的面积重量、蓄电池组的体积重量。
5.在公告号为cn106324631b的中国发明专利文献中,公开了一种遥感卫星能源平衡约束分析系统及方法,讲述了一种针对具有快速姿态机动需求的高分辨率遥感卫星的复杂任务规划、复杂构形,动态分析卫星的能源平衡,适用于当圈能量平衡状态。在公告号为cn102928714b的中国发明专利文献中,公开了一种基于i-v曲线与能量平衡的小卫星太阳阵寿命预测方法,讲述了一种基于能量平衡的太阳阵寿命预测方法,侧重于能量平衡的应用。在公告号为cn106208038b的中国发明专利文献中。公开了一种航天器双母线能量平衡分析方法,讲述了双母线航天器的能量平衡设计,未涉及多圈能量平衡状态。在公开号为cn108460218a的中国专利文献中公开了一种光学成像类小卫星功耗预算与能源平衡分析方法,先结合用户使用要求,自定义计算单个工作模式下的卫星功耗值;然后,根据卫星工作模式,按照单轨工作状态合理考虑功耗值,计算卫星单轨总能耗;根据不同电池阵的选型和设计裕量,接着计算满足能源平衡要求的太阳电池阵参数,包括太阳电池阵单轨最小能量、太阳电池阵最小功率、太阳电池阵最小有效面积、太阳电池阵最小设计面积、考虑裕量后的太阳电池阵设计面积、考虑裕量后的太阳电池阵有效面积、考虑裕量后的太阳电池阵功率、考虑裕量后太阳电池阵单轨能量;最后,计算锂电池组的能量需求,并进行电池选型。
6.上述专利均是在当圈平衡的状态下进行航天器能量平衡设计的相关专利,无法适应航天器任务多样化、有效载荷高功率化后短期功率增加的趋势,极大地限制了能量平衡设计方法的适用范围。
技术实现要素:
7.针对现有技术中的缺陷,本发明的目的是提供一种航天器多圈能量平衡设计方法及系统。
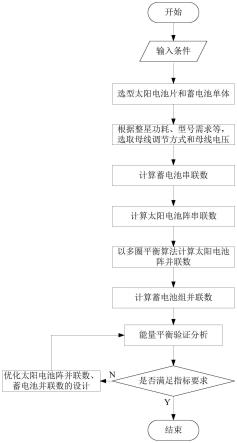
8.根据本发明提供的一种航天器多圈能量平衡设计方法,包括以下步骤:
9.步骤s1:输入条件参数,所述条件参数包括轨道参数、负载参数、太阳电池片参数、蓄电池单体参数、空间环境参数和限定条件参数;
10.步骤s2:对太阳电池片和蓄电池单体进行选型,获取太阳电池片参数和蓄电池单体参数;
11.步骤s3:根据整个航天器的功耗和型号需求,选取母线调节方式和母线电压;
12.步骤s4:计算蓄电池串联数;
13.步骤s5:计算太阳电池阵串联数;
14.步骤s6:以多圈平衡算法计算太阳电池阵并联数;
15.步骤s7:计算蓄电池组并联数;
16.步骤s8:进行能量平衡验证分析;
17.步骤s9:判断航天器是否满足指标要求,若满足,则输出设计结果;若不满足,则对太阳电池阵、蓄电池的并联数进行优化设计,优化设计后重新进入步骤s8分析。
18.优选的,所述轨道参数包括轨道周期、单圈最长阴影时长、单圈最短光照时长以及光照角;所述负载参数包括航天器各工作模式下负载长期功耗、短期功耗以及平均功耗;所述太阳电池片参数包括单片最佳工作电压、工作电流面密度、单片面积以及损失因子;所述蓄电池单体参数包括单体额定容量、单体额定电压、单体平均放电电压以及单体放电截止电压;所述空间环境参数包括空间环境温度、太阳光强因子以及辐照通量,所述限定条件参数包括蓄电池组允许放电深度、太阳阵线路压降以及多圈平衡圈数。
19.优选的,所述蓄电池组串联数的计算方法如下:
[0020][0021]
式中,n
bs
表示蓄电池组的串联数,u
busmin
表示母线最低电压,v
rated
表示蓄电池单体额定电压。
[0022]
优选的,所述太阳电池阵串联数的计算方法如下:
[0023]
获得太阳电池阵需要输出的总电压:
[0024]vsa
=v
busmax
vw[0025]vmp
=v
mpφ
×fu
β
vp
(t
op
–
to)
[0026]
式中,v
sa
表示太阳电池阵输出总电压;
[0027]vbusmax
表示母线最高电压;
[0028]vw
表示母线压降;
[0029]vmp
表示寿命末期太阳电池片单片工作电压;
[0030]vmpφ
表示该太阳电池片在1mev能量,电子辐照通量为φe
·
cm-2
后,在标准温度to时的工作电压;
[0031]fu
表示寿命末期电压组合损失因子;
[0032]
β
vp
表示太阳电池工作电压温度系数;
[0033]
t
op
表示太阳电池工作温度;
[0034]
to表示太阳电池标准测试温度25℃;
[0035]
则太阳电池阵串联数的计算式为:
[0036]ns
=v
sa
/v
mp
。
[0037]
优选的,所述太阳电池阵并联数的计算方法如下:
[0038]
计算太阳电池片末期工作电流:
[0039]imp
=[i
mpφ
β
ip
(t
op
–
to)]
×s×s’×fm
×fsh
[0040]
式中,i
mpφ
表示该太阳电池片在1mev能量,电子辐照通量为φe
·
cm-2
后,在标准温度to时的工作电流面密度;
[0041]
β
ip
表示平均温度系数;
[0042]
s表示有效光照面积;
[0043]
s’表示电池片受日地距离因素的影响系数;
[0044]fm
表示寿命末期电流组合损失因子;
[0045]fsh
表示太阳电池片的遮挡系数,当太阳电池片无遮挡时f
sh
为1;
[0046]
计算负载供电所需电流:
[0047][0048][0049]
i=ic id[0050]
式中,ic表示负载所需电流;
[0051]
p
ll
表示光照期的长期负载功率;
[0052]
i表示卫星光照期所需的总电流;
[0053]
ic表示负载所需电流;
[0054]
id表示蓄电池组充电所需的平均电流;
[0055]
p
ls
表示阴影期的长期负载功率;
[0056]
ts表示卫星最长阴影时长;
[0057]
m表示卫星所需多圈平衡的圈数;
[0058]
ps表示短期负载功率,不含长期负载功率;
[0059]
t表示各项短期功率在阴影期的工作时长,上限为最长阴影时长;
[0060]
t
l
表示卫星最短光照时长;
[0061]
ηd表示放电效率;
[0062]
ηc表示充电效率;
[0063]
n表示蓄电池组单体串联数;
[0064]vd
表示蓄电池单体平均放电电压;
[0065]
计算太阳电池阵并联数:
[0066]
[0067]
式中,θ取一年内的最差光照角,考虑设计余量,n
p
向上取整,并取适当余量。
[0068]
优选的,所述蓄电池组并联数的计算方法如下:
[0069]
计算单组蓄电池单圈最大放电量:
[0070][0071]
式中,p
ls
表示阴影期的长期负载功率;
[0072]
ts表示最长阴影时长;
[0073]
ps表示短期负载功率,不包含长期负载功率;
[0074]
t表示各项短期功耗在阴影期的工作时长,上限为最长阴影时长ts;
[0075]
n表示蓄电池组数;
[0076]
ηd表示放电效率;
[0077]
n表示蓄电池组单体串联数;
[0078]vd
表示蓄电池组单体平均放电电压;
[0079]
则单组蓄电池组所需的最小容量:
[0080]
q=qd/dod
[0081]
式中,dod表示设定的最大允许放电深度;
[0082]
得到单组蓄电池组并联数:
[0083]nbp
=q/qn[0084]
式中,qn为单体容量。
[0085]
优选地,所述能量平衡验证分析包括:根据设定的母线电压、太阳电池阵串并联数、蓄电池组串并联数,对在轨末期的单圈能量平衡状况进行验证计算。
[0086]
根据本发明提供的一种航天器多圈能量平衡设计系统,其特征在于,包括以下模块:
[0087]
模块m1:输入条件参数,所述条件参数包括轨道参数、负载参数、太阳电池片参数、蓄电池单体参数、空间环境参数和限定条件参数;
[0088]
模块m2:对太阳电池片和蓄电池单体进行选型,获取太阳电池片参数和蓄电池单体参数;
[0089]
模块m3:根据整个航天器的功耗和型号需求,选取母线调节方式和母线电压;
[0090]
模块m4:计算蓄电池串联数;
[0091]
模块m5:计算太阳电池阵串联数;
[0092]
模块m6:以多圈平衡算法计算太阳电池阵并联数;
[0093]
模块m7:计算蓄电池组并联数;
[0094]
模块m8:进行能量平衡验证分析;
[0095]
模块m9:判断航天器是否满足指标要求,若满足,则输出设计结果;若不满足,则对太阳电池阵、蓄电池的并联数进行优化设计,优化设计后重新进入步骤s8 分析。
[0096]
与现有技术相比,本发明具有如下的有益效果:
[0097]
1、本发明有效解决了整星负载功率过大时供配电分系统体积重量超限的问题,为航天器多圈能量平衡的供配电分系统设计提供了可行的方案,扩大了能量平衡设计方法的
适用范围;
[0098]
2、本发明的能量平衡设计方法,适用于航天器多圈平衡状态下,适应航天器任务多样化、有效载荷高功率化后短期功率增加的趋势;
[0099]
3、本发明极大地扩展了航天器能量平衡设计方法的适用范围。
附图说明
[0100]
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
[0101]
图1为本发明实施例中航天器多圈能量平衡设计方法流程图;
[0102]
图2为本发明实施例中的蓄电池组串联数计算流程图;
[0103]
图3为本发明实施例中的太阳电池阵串联数计算流程图;
[0104]
图4为本发明实施例中的太阳电池阵并联数计算流程图;
[0105]
图5为本发明的蓄电池组并联数计算流程图。
具体实施方式
[0106]
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
[0107]
一种航天器多圈能量平衡设计方法,如图1所示,包括以下步骤:
[0108]
步骤s1:输入条件参数,所述条件参数包括轨道参数、负载参数、太阳电池片参数、蓄电池单体参数、空间环境参数和限定条件参数。
[0109]
轨道参数包括轨道周期、单圈最长阴影时长、单圈最短光照时长以及光照角;所述负载参数包括航天器各工作模式下负载长期功耗、短期功耗以及平均功耗;所述太阳电池片参数包括单片最佳工作电压、工作电流面密度、单片面积以及损失因子;所述蓄电池单体参数包括单体额定容量、单体额定电压、单体平均放电电压以及单体放电截止电压;所述空间环境参数包括空间环境温度、太阳光强因子以及辐照通量,所述限定条件参数包括蓄电池组允许放电深度、太阳阵线路压降以及多圈平衡圈数。
[0110]
步骤s2:对太阳电池片和蓄电池单体进行选型,获取太阳电池片参数和蓄电池单体参数。
[0111]
步骤s3:根据整个航天器的功耗和型号需求,选取母线调节方式和母线电压。
[0112]
步骤s4:计算蓄电池串联数。
[0113]
如图2所示,蓄电池组串联数的计算方法如下:
[0114][0115]
式中,n
bs
表示蓄电池组的串联数,u
busmin
表示母线最低电压,v
rated
表示蓄电池单体额定电压。
[0116]
步骤s5:计算太阳电池阵串联数。
[0117]
如图3所示,太阳电池阵串联数的计算方法如下:
[0118]
获得太阳电池阵需要输出的总电压:
[0119]vsa
=v
busmax
vw[0120]vmp
=v
mpφ
×fu
β
vp
(t
op
–
to)
[0121]
式中,v
sa
表示太阳电池阵输出总电压;
[0122]vbusmax
表示母线最高电压;
[0123]vw
表示母线压降;
[0124]vmp
表示寿命末期太阳电池片单片工作电压;
[0125]vmpφ
表示该太阳电池片在1mev能量,电子辐照通量为φe
·
cm-2
后,在标准温度to时的工作电压;
[0126]fu
表示寿命末期电压组合损失因子;
[0127]
β
vp
表示太阳电池工作电压温度系数;
[0128]
t
op
表示太阳电池工作温度;
[0129]
to表示太阳电池标准测试温度25℃;
[0130]
则太阳电池阵串联数的计算式为:
[0131]ns
=v
sa
/v
mp
。
[0132]
步骤s6:以多圈平衡算法计算太阳电池阵并联数。
[0133]
如图4所示,太阳电池阵并联数的计算方法如下:
[0134]
计算太阳电池片末期工作电流:
[0135]imp
=[i
mpφ
β
ip
(t
op
–
to)]
×s×s’×fm
×fsh
[0136]
式中,i
mpφ
表示该太阳电池片在1mev能量,电子辐照通量为φe
·
cm-2
后,在标准温度to时的工作电流面密度;
[0137]
β
ip
表示平均温度系数;
[0138]
s表示有效光照面积;
[0139]
s’表示电池片受日地距离因素的影响系数;
[0140]fm
表示寿命末期电流组合损失因子;
[0141]fsh
表示太阳电池片的遮挡系数,当太阳电池片无遮挡时f
sh
为1;
[0142]
计算负载供电所需电流:
[0143][0144][0145]
i=ic id[0146]
式中,ic表示负载所需电流;
[0147]
p
ll
表示光照期的长期负载功率;
[0148]
i表示卫星光照期所需的总电流;
[0149]
ic表示负载所需电流;
[0150]
id表示蓄电池组充电所需的平均电流;
[0151]
p
ls
表示阴影期的长期负载功率;
[0152]
ts表示卫星最长阴影时长;
[0153]
m表示卫星所需多圈平衡的圈数;
[0154]
ps表示短期负载功率(不含长期负载功率);
[0155]
t表示各项短期功率在阴影期的工作时长,上限为最长阴影时长;
[0156]
t
l
表示卫星最短光照时长;
[0157]
ηd表示放电效率;
[0158]
ηc表示充电效率;
[0159]
n表示蓄电池组单体串联数;
[0160]vd
表示蓄电池单体平均放电电压。
[0161]
计算太阳电池阵并联数:
[0162][0163]
式中,θ取一年内的最差光照角,考虑设计余量,n
p
向上取整,并取适当余量。
[0164]
步骤s7:计算蓄电池组并联数。
[0165]
如图5所示,蓄电池组并联数的计算方法如下:
[0166]
计算单组蓄电池单圈最大放电量:
[0167][0168]
式中,p
ls
表示阴影期的长期负载功率;
[0169]
ts表示最长阴影时长;
[0170]
ps表示短期负载功率,不包含长期负载功率;
[0171]
t表示各项短期功耗在阴影期的工作时长,上限为最长阴影时长ts;
[0172]
n表示蓄电池组数;
[0173]
ηd表示放电效率;
[0174]
n表示蓄电池组单体串联数;
[0175]vd
表示蓄电池组单体平均放电电压;
[0176]
则单组蓄电池组所需的最小容量:
[0177]
q=qd/dod
[0178]
式中,dod表示设定的最大允许放电深度;
[0179]
得到单组蓄电池组并联数:
[0180]nbp
=q/qn[0181]
式中,qn为单体容量。
[0182]
步骤s8:进行能量平衡验证分析。
[0183]
步骤s9:判断航天器是否满足指标要求,若满足,则输出设计结果;若不满足,则对太阳电池阵、蓄电池的并联数进行优化设计,优化设计后重新进入步骤s8分析。
[0184]
在完成能量平衡设计后,需要根据设定的母线电压、太阳电池阵串并联数、蓄电池组串并联数,对在轨末期的多圈能量平衡状况进行验证计算。
[0185]
母线电压u
bus
,太阳电池阵串联数ns、总并联数n
p
,蓄电池组串联数n
bs
、总并联数n
bp
。
[0186]
多圈平衡(平衡圈数为m)的工况分为两种,分别是第1轨、第2~m轨,第1轨短期负载开机工作,第2轨至第m轨仅有长期负载工作。
[0187]
取第1轨最差光照角θ1(最差光照角持续时间很短时,可取平均光照角),第1轨的太阳电池阵输出总电量:
[0188]qsa1
=i
mp
×np
×
cosθ1×
t
l1
/60
[0189]
式中,t
l1
——第1轨的光照时长(min);
[0190]imp
——太阳电池片末期工作电流(a)。
[0191]
第1轨光照期的负载消耗电量:
[0192][0193]
式中,p
ll
——光照期的长期负载功率(w);
[0194]
t
l1
——第1轨的光照时长(min);
[0195]
ps——短期负载功率(w),不包含长期负载功率;
[0196]
t
l1
——第1轨时各项短期功耗在光照期的工作时长(min);
[0197]ubus
——母线电压(v),不调节母线按最低母线电压u
bus min
计算;
[0198]
η
t
——电源控制器或电源变换器的传输效率,近似理想情况下可默认为1。
[0199]
第1轨光照期可提供给蓄电池的最大充电电量:
[0200]qc1
=(q
sa1-q
l1
)
×
ηc[0201]
式中,ηc——充电效率。
[0202]
第1轨蓄电池组阴影期的最大总放电量:
[0203][0204]
式中:p
ls
——阴影期的长期负载功率(w);
[0205]
t
s1
——第1轨的阴影时长(min);
[0206]
ps——短期负载功率(w),不包含长期负载功率;
[0207]
t
s1
——第1轨时各项短期功耗在阴影期的工作时长(min);
[0208]
ηd——放电效率;
[0209]
n——蓄电池组单体串联数;
[0210]vd
——蓄电池组单体平均放电电压。
[0211]
第1轨末,理论上的累计电量:
[0212]qr1
=q
c1-q
d1
[0213]
取第n轨(2≤n≤m)最差光照角θn(最差光照角持续时间很短时,可取平均光照角),第n轨的太阳电池阵输出总电量:
[0214]qsan
=i
mp
×np
×
cosθn×
t
ln
/60
[0215]
式中,t
ln
——第n轨的光照时长(min);
[0216]imp
——太阳电池片末期工作电流(a)。
[0217]
第n轨光照期的负载消耗电量:
[0218][0219]
式中,p
ll
——光照期的长期负载功率(w);
[0220]
t
ln
——第n轨的光照时长(min);
[0221]ubus
——母线电压(v),不调节母线按最低母线电压u
bus min
计算;
[0222]
η
t
——电源控制器或电源变换器的传输效率,近似理想情况下可默认为1。
[0223]
第n轨光照期可提供给蓄电池的最大充电电量:
[0224]qcn
=(q
san-q
ln
)
×
ηc[0225]
式中,ηc——充电效率。
[0226]
第n轨蓄电池组阴影期的最大总放电量:
[0227][0228]
式中:p
ls
——阴影期的长期负载功率(w);
[0229]
t
sn
——第n轨的阴影时长(min);
[0230]
ηd——放电效率;
[0231]
n——蓄电池组单体串联数;
[0232]vd
——蓄电池组单体平均放电电压。
[0233]
第n轨末,理论上的累计电量:
[0234]qrn
=q
cn-q
dn
[0235]
根据上述计算结果,可形成能量平衡分析表,如下表所示。
[0236]
表1能量平衡分析表
[0237][0238]
在第m轨首次出现且各圈蓄电池放电深度均在指标允许范围内,则卫星可实现m圈平衡。
[0239]
本发明还公开了一种航天器多圈能量平衡设计系统,包括以下模块:
[0240]
模块m1:输入条件参数,所述条件参数包括轨道参数、负载参数、太阳电池片参数、蓄电池单体参数、空间环境参数和限定条件参数;
[0241]
模块m2:对太阳电池片和蓄电池单体进行选型,获取太阳电池片参数和蓄电池单
体参数;
[0242]
模块m3:根据整个航天器的功耗和型号需求,选取母线调节方式和母线电压;
[0243]
模块m4:计算蓄电池串联数;
[0244]
模块m5:计算太阳电池阵串联数;
[0245]
模块m6:以多圈平衡算法计算太阳电池阵并联数;
[0246]
模块m7:计算蓄电池组并联数;
[0247]
模块m8:进行能量平衡验证分析;
[0248]
模块m9:判断航天器是否满足指标要求,若满足,则输出设计结果;若不满足,则对太阳电池阵、蓄电池的并联数进行优化设计,优化设计后重新进入步骤s8 分析。
[0249]
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统及其各个装置、模块、单元以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统及其各个装置、模块、单元以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同功能。所以,本发明提供的系统及其各项装置、模块、单元可以被认为是一种硬件部件,而对其内包括的用于实现各种功能的装置、模块、单元也可以视为硬件部件内的结构;也可以将用于实现各种功能的装置、模块、单元视为既可以是实现方法的软件模块又可以是硬件部件内的结构。
[0250]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。