技术特征:
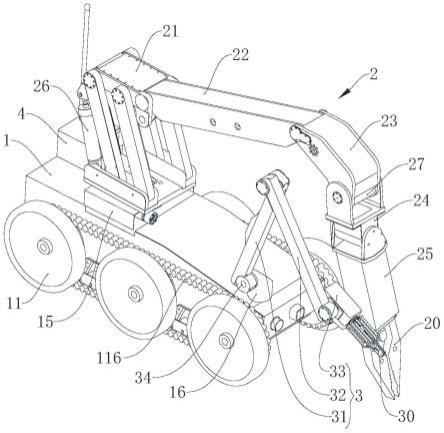
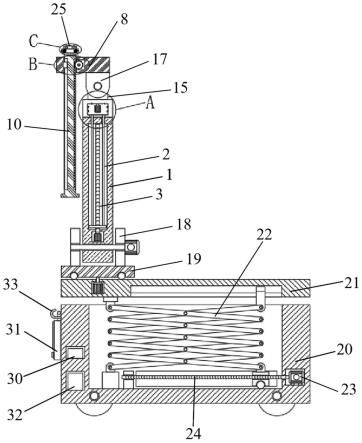
1.电液两驱双臂排爆机器人,其特征在于,包括:机体,设有中空腔,两侧分别水平间隔分布有三个行走轮,所述中空腔内设有两组电驱机构、液压泵站和蓄电池组,所述机体的顶壁上设有液压转台和电动转台,其中,所述液压转台与所述液压泵站连接,两组所述电驱机构的输出端分别与位于所述机体两侧的至少一个所述行走轮连接,所述电驱机构和所述电动转台均与所述蓄电池组电连接;主机械臂,固定连接于所述液压转台的输出端,包括依次铰接的多个第一关节臂、连接于末端的所述第一关节臂上的液压抓手,以及分别用于驱动各个所述第一关节臂和所述液压抓手动作的多个液压驱动件,各个所述液压驱动件分别与所述液压泵站连接;辅助机械臂,设于所述电动转台的输出端,包括依次铰接的多节第二关节臂、连接于末端的所述第二关节臂上的电动抓手,及分别用于驱动各个所述第二关节臂动作的多个电驱动件,各个所述电驱动件分别与所述蓄电池组电连接;控制系统,设于所述机体上,与所述蓄电池组、所述电驱机构、所述液压泵站、所述电动转台、各个所述电驱动件及所述电动抓手分别电连接。2.如权利要求1所述的电液两驱双臂排爆机器人,其特征在于,所述主机械臂包括:第一摆臂,一端用于固定连接在所述液压转台的输出端,另一端向上延伸;第一悬臂,一端与所述第一摆臂的延伸端水平铰接,另一端向远离所述第一摆臂的方向延伸;第二悬臂,一端与所述第一悬臂的延伸端水平铰接,另一端向远离所述第一悬臂的方向延伸并向下弯折;第三悬臂,一端与所述第二悬臂的弯折端转动连接,另一端向下延伸;第四悬臂,一端与所述第三悬臂的延伸端转动连接,另一端设有所述液压抓手,所述第四悬臂的旋转轴向与所述第三悬臂的旋转轴向垂直;其中,所述第一摆臂、所述第一悬臂、所述第二悬臂于同一竖直平面内摆动,所述第三悬臂也在所述竖直平面内转动;用于驱动所述第一摆臂、所述第一悬臂、所述第二悬臂摆动的所述液压驱动件为伸缩油缸,用于驱动所述第三悬臂和所述第四悬臂旋转的所述液压驱动件为摆动油缸。3.如权利要求2所述的电液两驱双臂排爆机器人,其特征在于,所述液压抓手包括:抓手本体,沿所述第四悬臂的轴向转动连接于所述第四悬臂的端部,具有用于驱动其进行张合的连杆机构;抓手油缸,设于所述第四悬臂的内部,输出端与所述连杆机构连接;液压马达,设于所述第四悬臂的内部,且位于所述抓手油缸的侧方,所述液压马达的输出端与所述抓手本体连接。4.如权利要求1所述的电液两驱双臂排爆机器人,其特征在于,所述辅助机械臂包括:第二摆臂,一端转动连接于所述电动转台的输出端,且转动轴的轴向水平,另一端向斜上方延伸;第三摆臂,一端转动连接于所述第二摆臂的延伸端,且与所述第二摆臂的转动轴的轴向一致,另一端向斜下方延伸;悬座,转动连接于所述第三摆臂的延伸端,且与所述第三摆臂的转动轴的轴向一致,所述悬座上设有所述电动抓手;
其中,用于驱动所述第二摆臂、所述第三摆臂、所述悬座的所述电驱动件均为蜗轮蜗杆减速电机。5.如权利要求4所述的电液两驱双臂排爆机器人,其特征在于,所述电动抓手包括:四连杆手抓,沿所述悬座的转动轴的径向转动连接于所述悬座上;第一驱动件,设于所述悬座内部,输出端与所述四连杆手抓的转动轴连接;第二驱动件,设于所述悬座内部,输出端与所述四连杆手抓连接,用于驱动所述四连杆手抓张合。6.如权利要求5所述的电液两驱双臂排爆机器人,其特征在于,所述四连杆手抓包括:转座,转动连接于所述悬座上,所述转座上设有沿其轴向贯穿的穿孔,所述转座上转动连接有与所述穿孔轴向对齐的第一蜗杆;两个内摆杆,对称分布于所述第一蜗杆的两侧,所述内摆杆的一端与所述转座铰接,且设有与其铰接轴同轴、并与所述第一蜗杆啮合连接的第一蜗轮,所述内摆杆的另一端沿所述第一蜗杆的轴向延伸;两个外摆杆,对称分布于所述第一蜗杆的两侧,且位于两个所述内摆杆的外侧,所述外摆杆的一端与所述转座铰接,另一端沿所述第一蜗杆的轴向延伸;两个夹板,对称分布于所述第一蜗杆的两侧,所述夹板分别与位于所述第一蜗杆同一侧的所述内摆杆和所述外摆杆的延伸端铰接;其中,所述转座上沿所述穿孔的轴向套设有第二蜗轮,所述悬座上转动连接有第二蜗杆,所述第二蜗杆上套设有第一斜齿轮,所述第一驱动件和所述第二驱动件均为电机,其中,所述第一驱动件的输出端套设有与所述第一斜齿轮啮合连接的第二斜齿轮;所述第二驱动件的输出端与所述第一蜗杆连接。7.如权利要求1所述的电液两驱双臂排爆机器人,其特征在于,所述行走轮包括:轴座,固定连接于所述机体的侧壁上;轮轴,穿设于所述轴座内并与所述轴座转动连接,所述轮轴远离所述机体的一端设有法兰盘;轮毂,固定连接于所述法兰盘上,所述轮毂上套设有轮胎;其中,位于所述机体同侧的至少一个所述行走轮的所述轮轴伸入所述中空腔内,且伸入端与所述电驱机构的输出端连接。8.如权利要求7所述的电液两驱双臂排爆机器人,其特征在于,所述电驱机构包括:减速电机,固定连接于所述中空腔内,输出端与位于所述机体一侧的其中一个所述轮轴的伸入端连接;第一传动轮,套设固定于与所述减速电机连接的所述轮轴上;第二传动轮,套设固定于与所述第一传动轮相邻的其中一个所述轮轴上;传动件,两端分别环套于所述第一传动轮和所述第二传动轮上,用于带动所述第二传动轮随所述第一传动轮转动。9.如权利要求7所述的电液两驱双臂排爆机器人,其特征在于,每个所述轮毂上均同轴连接有履带轮,所述履带轮的直径小于所述轮胎的直径,位于所述机体同侧的各个所述履带轮上一并套装有双面齿履带,其中,前后两个所述履带轮为齿形轮,中间的所述履带轮为光滑支撑轮,所述双面齿履带的内带齿与两个所述齿形轮啮合连接。
10.如权利要求1-9任一项所述的电液两驱双臂排爆机器人,其特征在于,所述液压泵站包括变量泵,以及与所述变量泵连接的负载敏感阀,所述负载敏感阀与所述液压转台、各个所述液压驱动件、所述液压抓手分别连接。
技术总结
本发明提供了一种电液两驱双臂排爆机器人,包括机体、主机械臂、辅助机械臂,以及控制系统;机体两侧分别设有三个行走轮,机体内设有两组电驱机构、液压泵站和蓄电池组,机体的顶壁上设有液压转台和电动转台;主机械臂固定连接于液压转台上,包括依次铰接的多个第一关节臂、连接于末端的第一关节臂上的液压抓手,以及分别用于驱动各个第一关节臂和液压抓手动作的多个液压驱动件;辅助机械臂设于电动转台上,包括依次铰接的多节第二关节臂、连接于末端的第二关节臂上的电动抓手,及分别用于驱动各个第二关节臂动作的多个电驱动件。本发明提供的电液两驱双臂排爆机器人,降低排爆机器人的排爆作业用时,提高排爆效率。提高排爆效率。提高排爆效率。
技术研发人员:龙海生 常程栋
受保护的技术使用者:河北易沃克机器人科技有限公司
技术研发日:2022.09.02
技术公布日:2022/12/16
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。