1.本发明涉及光学加工检测技术领域,可用于非球面柱面镜以及球面柱面镜的加工与检测,具体涉及一种基于三坐标轮廓测量仪检测柱面镜的数据处理方法。
背景技术:
2.柱面镜作为一种非球面镜,其子午和弧矢方向截面的交线分别为两圆弧的交线与两平行线的直线,当平行激光束通过柱面镜时会汇聚成一条线。随着科技的发展,柱面镜凭其光学特性在民用产品如摄影设备、条形码、医疗器械等方面有着广泛的应用,在航空航天、激光发射器等军用领域也发挥着举足轻重的作用。但是柱面镜不具有旋转对称性,加工工艺较为复杂,检测难度也较大,柱面镜的检测主要有样板法、轮廓仪法、计算机全息法、标准柱面镜法等。高精度非球柱面镜面前期加工阶段即研磨和粗抛阶段,镜面未抛亮,不能进行干涉检测,三坐标轮廓测量技术成为加工前期阶段面形误差主要检测手段。
3.在三坐标测量中,受限于机床精度以及各种不可免的装调误差产生的测量误差,在柱面镜这种特殊非球面镜的检测数据分析中造成一定的困难,为了提高前期加工精度,准确的检测面形残差用来确定镜面的修抛量是提高光学非球面加工效率的有效途径。因此一种可靠、高精度的检测数据处理方法是决定柱面加工效率的关键因素。
技术实现要素:
4.针对以上现有技术的不足,本发明的目的在于提供一种基于三坐标轮廓测量仪检测柱面镜的数据处理方法,能够解决三坐标测量法检测柱面时,由于原始数据存在测量误差,不能直接用于指导加工的技术问题。
5.为了实现上述目的,本发明提供如下技术方案:
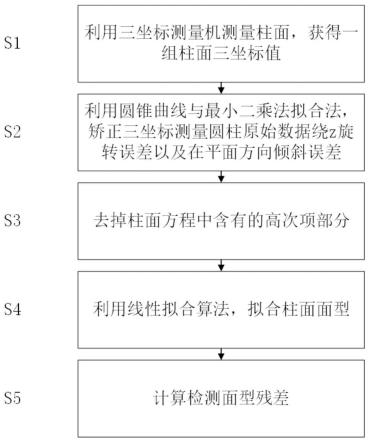
6.基于三坐标轮廓测量仪检测柱面镜的数据处理方法,该方法包括以下步骤:
7.步骤s1:利用三坐标测量机测量柱面,获得一组柱面三坐标值为[x,y,z],其中x为非平面方向坐标值,y为平面方向坐标值,z为矢高方向坐标值;
[0008]
步骤s2:利用圆锥曲线与最小二乘法拟合法,矫正三坐标测量圆柱原始数据绕z旋转误差以及在平面方向倾斜误差,求解矫正误差之后的柱面矢高z';
[0009]
步骤s3:将柱面方程中含有的高次项部分去掉;
[0010]
步骤s4:利用线性拟合算法,拟合柱面面型,求解柱面矢高z”;
[0011]
步骤s5:将步骤s2求解的柱面矢高z'与步骤s4求解的柱面矢高z”作差,得到检测面型残差σ。
[0012]
优选地,所述该方法只矫正单一平面方向倾斜误差。
[0013]
与现有技术相比,本发明的有益效果为:
[0014]
(1)本发明的方法利用圆锥曲线方程与最小二乘法矫正测量数据的旋转误差与平面方向倾斜误差,避免了旋转误差带来的45
°
像散对面型拟合造成的拟合不准确;
[0015]
(2)以往数据处理方法采取矫正整个面型倾斜误差的方法,但是由于圆柱拟合面
型时会矫正非平面方向的平移,该方法会造成后续面型拟合非平面方向产生慧差的情况,因此本发明的方法只矫正单一平面方向倾斜误差,能够避免该慧差出现;
[0016]
(3)本发明的方法利用线性拟合算法拟合柱面面型,实现了快速计算,提高了拟合面型的准确度。
[0017]
(4)本发明公开了一种基于三坐标轮廓测量仪检测柱面镜的数据处理方法,该方法实现流程包括以下步骤:s1:利用三坐标测量机测量柱面,获得一组柱面三坐标值为[x,y,z],其中x为非平面方向坐标值,y为平面方向坐标值,z为矢高方向坐标值;s2:利用圆锥曲线与最小二乘法拟合法,矫正三坐标测量圆柱原始数据绕z旋转误差以及在平面方向倾斜误差,求解矫正误差之后的柱面矢高z';s3:将柱面方程中含有的高次项部分去掉;s4:利用线性拟合算法,拟合柱面面型,求解柱面矢高z”;s5:将步骤s2求解的柱面矢高z'与步骤s4求解的柱面矢高z”作差,得到检测面型残差σ。本发明利用圆锥曲线公式与最小二乘法拟合矫正倾斜与旋转误差,线性拟合算法拟合面型,计算出检测面型残差σ,提高了三坐标或者其他轮廓仪检测柱面镜时面型信息的准确度,可以应用于指导非球面柱面镜以及球面柱面镜的光学加工与检测等领域。
附图说明
[0018]
为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
[0019]
图1是本发明的流程示意图;
[0020]
图2是一组柱面镜三坐标实测示例图;
[0021]
图3是本发明绕z旋转误差引起的45
°
像散误差示例图;
[0022]
图4是三坐标检测柱面镜数据处理之后面形残差示例图。
具体实施方式
[0023]
下面结合说明书附图,以举例的方式对本发明创造的内容作出详细描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
[0024]
基于三坐标轮廓测量仪检测柱面镜的数据处理方法,如图1所示,该方法包括以下步骤:
[0025]
步骤s1:利用三坐标或者其他轮廓仪测量柱面,获得一组柱面三坐标值为[x,y,z],其中x为非平面方向坐标值,y为平面方向坐标值,z为矢高方向坐标值,示例如图2所示;
[0026]
所述步骤s1具体为:利用三坐标测量机测量柱面,获得一组柱面三坐标值为[x,y,z],一般柱面方程为:
[0027][0028]
其中c为曲率,k为圆锥系数,a1,a2为高次项系数。
[0029]
步骤s2:利用圆锥曲线与最小二乘法拟合法,矫正三坐标测量圆柱原始数据绕z旋转误差引起的45
°
像散误差以及在平面方向倾斜误差,该方法只矫正单一平面方向倾斜误差,求解矫正误差之后的柱面矢高z',如图3所示;
[0030]
所述步骤s2具体为:利用圆锥曲线与最小二乘法拟合法,矫正三坐标测量圆柱原始数据绕z旋转误差引起的45
°
像散误差以及在平面方向倾斜误差。圆锥曲线方程为:z=ax2 by2 cxy dx ey f,用最小二乘法解出相关系数:
[0031]
设f(x,y,z)=(ax2 by2 cxy dx ey f-z)2[0032][0033][0034][0035][0036][0037][0038]
解六元一次方程之后得到a,b,c,d,e,f,由圆锥曲线方程的几何性质可知,c为该三维数据的旋转参数,d为x方向的倾斜参数,e为y方向的倾斜参数。y方向为平面方向,因此矫正误差之后的矢高z':
[0039]
z'=z-(cxy ey f)
[0040]
步骤s3:将柱面方程中含有的高次项部分去掉;
[0041]
所述步骤s3具体为:若柱面为含有高次项非球面柱面,则不能直接利用线性拟合面型,需将高次项部分去掉,即:
[0042]
z=z'-(a1x2 a2x4 ...)
[0043]
步骤s4:利用线性拟合算法,拟合柱面面型,求解柱面矢高z”;
[0044]
所述步骤s4具体为:利用线性拟合算法,拟合柱面面型,基于柱面模型为:
[0045]
(x-b
x
)2=2r(z'-bz)-(1 k)(z'-bz)2[0046]
其中b
x
为x方向偏心,bz为z方向偏心。
[0047]
将上式转化为:
[0048]
x2 z'2=2[r bz(1 k)]z'-kz'
2-2rb
z-(1 k)b
z2
2xb
x
[0049]
设
[0050]
a=x2 z'2,
[0051]
a1=r bz(1 k),
[0052]
a2=k,
[0053]
a3=2rbz (1 k)b
z2
,
[0054]
a4=bx,
[0055]
e=[2z',-z'2,-1,2x]
[0056]
上式化为:
[0057][0058][0059]
求得:
[0060][0061]
得到柱面矢高为:
[0062][0063]
步骤s5:将步骤s2求解的柱面矢高z'与步骤s4求解的柱面矢高z”作差,得到检测面型残差σ,如图4所示。
[0064]
所述步骤s5具体为:将步骤s2求解的柱面矢高z'与步骤s4求解的柱面矢高z”作差,得到的检测面型残差σ。
[0065]
σ=z'-z”[0066]
本发明可应用于指导柱面镜的光学加工,由于存在原始测量误差,本发明提出的数据处理方法可以准确的计算检测面形残差,用来确定镜面的修抛量,有效提高柱面镜的光学加工精度和效率。
[0067]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其申请构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。