1.本发明涉及卫星导航系统欺骗干扰信号识别技术领域,具体是一种频域下卫星导航系统欺骗干扰信号识别方法。
背景技术:
2.目前卫星导航系统欺骗干扰信号识别技术主要有以欺骗信号与真实信号功率差值为基础的信号功率检测技术,通过设定适当的功率检测门限识别欺骗信号,但其受外部电磁环境影响大,误判率较高;基于相关器功能的信号质量检测技术降低了外部电磁环境对识别准确率的影响,但是不适用于大功率欺骗信号场景;引入神经网络算法的干扰信号识别方法,对常见含噪干扰信号具有较高的识别准确率,但是未对相似度较高的欺骗干扰信号做测试验证;通过进行联合检测霍夫变换后得到的接收信号的载波多普勒和码多普勒,实现了对真假卫星导航信号的识别,但是复杂度较高。
技术实现要素:
3.本发明的目的在于提供一种频域下卫星导航系统欺骗干扰信号识别方法,以解决上述背景技术中提出的问题。
4.为实现上述目的,本发明提供如下技术方案:一种频域下卫星导航系统欺骗干扰信号识别技术,该方法包含以下步骤:
5.步骤1:预处理:
6.根据卫星导航信号和欺骗干扰信号特点,对n点信号进行预处理:
[0007][0008]
其中,x[n]为接收信号,e为自然对数的底数,i为虚数单位,n为信号长度,0≤n<n;
[0009]
步骤2:进一步处理频域信号
[0010]
将根据式(2)和式(3)做分解:
[0011]cj,k
=∑
n c
j-1,nhn-2k k=(0,1,2,
…
,n-1)
ꢀꢀꢀ
(2)
[0012]dj,k
=∑
n c
j-1,ngn-2k k=(0,1,2,
…
,n-1)
ꢀꢀꢀ
(3)
[0013]
其中,c
j,k
为系数,d
j,k
为系数,h(e
jw
)=g(e
j(w-π)
),j为分解层数,k为采样点数;
[0014]
由式(4)确定阈值:
[0015][0016]
其中,n为信号长度;
[0017]
根据式(5)得到系数w
j,k
,即
[0018]
[0019]
根据式(6)得到重构后的频域信号:
[0020]cj-1,n
=∑
n c
j,nhn-2k
∑
n w
j,ngn-2k
ꢀꢀꢀ
(6)
[0021]
步骤3:降维处理
[0022]
根据式(7)对重构的频域信号c
j-1,n
做降维处理,得到对角矩阵∑,即为特征信号:
[0023]cj-1,n
=u∑v
t
ꢀꢀꢀ
(7)
[0024]
其中,u为正交矩阵,维度为m
×
m,v为正交矩阵,维度为n
×
n,∑为对角矩阵,维度为m
×
n。
[0025]
步骤4:分类识别处理:
[0026]
根据式(8)和式(9)对卫星导航信号和欺骗干扰信号的特征信号∑进行分类识别处理,根据分类识别结果即可判断是否是欺骗干扰信号:
[0027][0028][0029]
其中,k(∑,xc)为空间中的一点∑到某中心xc之间的欧式距离,σ为方差,h为隐藏节点个数。
[0030]
与现有技术相比,本发明的有益效果是:
[0031]
和现有技术相比,本发明用于卫星导航系统欺骗干扰信号识别方法简单,且检测精度高,误报率低,实用性强,并具有较好的信噪比。
附图说明
[0032]
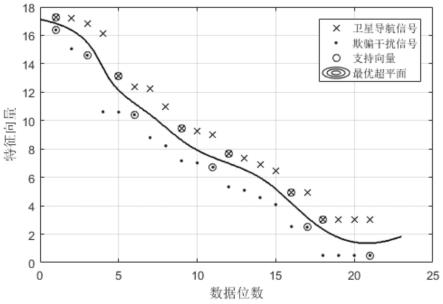
图1是本发明中处理后的卫星导航系统欺骗干扰信号识别结果示意图。
具体实施方式
[0033]
为了使本领域的技术人员更好地理解本技术方案,下面将结合本技术实施例中的附图对本技术实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本技术一部分的实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动成果前提下所获得的所有其他实施例,都应当属于本技术保护的范围。
[0034]
需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合,下面将参考附图1,并结合实施例来详细说明本技术。
[0035]
本实施例提供了一种频域下卫星导航系统欺骗干扰信号识别方法,所述方法包含以下步骤:
[0036]
步骤1:预处理:
[0037]
根据卫星导航信号和欺骗干扰信号特点,对n点信号进行预处理:
[0038][0039]
其中,x[n]为接收信号,e为自然对数的底数,i为虚数单位,n为信号长度,0≤n<n;
[0040]
步骤2:进一步处理频域信号
[0041]
将限据式(2)和式(3)做分解:
[0042]cj,k
=∑
n c
j-1,nhn-2k k=(0,1,2,
…
,n-1)
ꢀꢀꢀ
(2)
[0043]dj,k
=∑
n c
j-1,ngn-2k k=(0,1,2,
…
,n-1)
ꢀꢀꢀ
(3)
[0044]
其中,c
j,k
为系数,d
j,k
为系数,h(e
jw
)=g(e
j(w-π)
),j为分解层数,k为采样点数;
[0045]
由式(4)确定阈值:
[0046][0047]
其中,n为信号长度;
[0048]
根据式(5)得到系数w
j,k
,即
[0049][0050]
根据式(6)得到重构后的频域信号:
[0051]cj-1,n
=∑
n c
j,nhn-2k
∑
n w
j,ngn-2k
ꢀꢀꢀ
(6)
[0052]
步骤3:降维处理
[0053]
根据式(7)对重构的频域信号c
j-1,n
做降维处理,得到对角矩阵∑,即为特征信号:
[0054]cj-1,n
=u∑v
t
ꢀꢀꢀ
(7)
[0055]
其中,u为正交矩阵,维度为m
×
m,v为正交矩阵,维度为n
×
n,∑为对角矩阵,维度为m
×
n。
[0056]
步骤4:分类识别处理:
[0057]
根据式(8)和式(9)对卫星导航信号和欺骗干扰信号的特征信号∑进行分类识别处理,根据分类识别结果即可判断是否是欺骗干扰信号:
[0058][0059][0060]
其中,k(∑,xc)为空间中的一点∑到某中心xc之间的欧式距离,σ为方差,h为隐藏节点个数
[0061]
下面将结合具体数据对本实施例进行说明:首先接收卫星导航信号x[n],并按步骤1进行预处理,得到
[0062]
接着按步骤2对做进一步处理,采样点数为4096,分解层数为20,从而确定阈值,处理后得到系数w
j,k
,重构后得到频域信号c
j-1,n
:
[0063][0064][0065]
按步骤3进行降维处理,得到对角度矩阵∑,即为特征信号:
[0066][0067][0068]
最后按步骤4对卫星导航信号和欺骗干扰信号的特征信号∑进行分类识别处理,根据分类识别结果即可判断是否是欺骗干扰信号,且显著提高了频域下卫星导航系统频域信号与欺骗干扰频域信号特征和分类准确率,识别精度高,误报率低,实用性强,如图1。
[0069]
本实施例和现有技术相比,本实施例提供的用于卫星导航系统欺骗干扰信号识别方法简单,且检测精度高,误报率低,实用性强,并具有较好的信噪比。
[0070]
以上的,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。