1.本发明属于无人机调试技术领域,涉及一种无人机位于固定站位时的调试系统,实现对无人机的全机调试工作。
背景技术:
2.无人机需实现情报侦察、军事打击、信息对抗、通信中继、模拟飞行、空中预警等功能,为实现上述功能,其设计有多个系统同时交联工作,且由于无人的设计,多项复杂的信息无法按有人机的方式在座舱内由飞行员读取,只能将机外采集和无人机自身的各项数据进行编码,形成各类信号发送至地面站,在由地面站将各类信号进行解码以获得各项信息。
3.在上述过程中,地面站只能实现对无人机的指令发送以及信号收集,在无其他无人机或有人机伴飞的情况下,地面站的地勤人员无法获取无人机的实际动作状态,例如舵面、起落架、舱门等实际状态,在这种情况下,需要一套无人机固定站位调试系统,在无人机位于固定站位调试时,可最大程度上模拟实际空中工作状态,即能实现地面站具有的指令发送功能以及信号收集功能,又能通过外部设备实现实际动作状态信息采集功能,通过使用此系统的检测调试,保证飞机实际状态与自身采集状态一致,保证无人机正常工作时的安全性和可靠性,同时采用信息输出装置,可快速高效的输出检测信息,避免原有类似的审批流程浪费工作时间。
技术实现要素:
4.本发明的目的是提供一种无人机固定站位调试系统,用于无人机处于固定站位时的系统调试工作。
5.本发明的技术方案为:
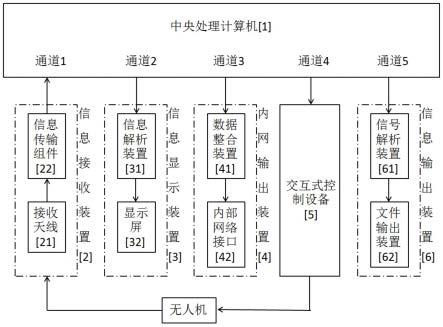
6.一种无人机固定站位调试系统,包括中央处理计算机1、信息接收装置2、信息显示装置3、内网输出装置4、交互式控制设备5和信息输出装置6。
7.所述中央处理计算机1共有五个通道,第一通道与信息接收装置2通信连接、第二通道与信息显示装置3连接、第三通道与内网输出装置4连接、第四通道与交互式控制设备5连接、第五通道与信息输出装置6连接,以上连接方式均采用网线信息输入/输出的方式进行连接。
8.所述信息接收装置2与无人机通信连接,其包含接收天线21和信息传输组件22。其中,接收天线21接收无人机发送的各项外部信息并将信息分析处理并打包为对应的数据包,再由信息传输组件22将数据包发送至中央处理计算机1。
9.所述信息显示装置3包含信号解析组件31和显示屏32,用于接收中央处理计算机1输出的电信号,通过信号解析组件31将电信号分类处理,用于接收数据包并将数据包解码为hdmi格式的图像信号和av格式的图像信号,在显示屏32上显示对应的图像。
10.所述内网输出装置4包括数据整合装置41和内部网络接口42;数据整合装置41将中央处理计算机1传输的各项数据整合成数据包,再通过内部网络接口42经网线传输进内
部网络。
11.所述交互式控制设备5用于将中央处理计算机1与无人机无线连接,用于接收对图像的交互式操作指令,并根据该交互式操作指令控制无人机。
12.所述信息输出装置6包含信号解析装置61和文件输出装置62;信号解析装置61将中央处理计算机1输出的数据转化为数字信号以及文字信号,再由文件输出装置62打印输出,供调试人员分析使用。
13.由上述无人机固定站位调试系统的组成可知,中央处理计算机1内设5个通道,分别接受或发送信息,信息实际为模拟量信号值,其通过中央处理计算机1与其余装置之间的各传感器进行传输,具体根据各传感器自身属性参数以及实际电流进行判定,具体公式如下:
14.wq=kg(iqrg vg)
15.其中,wq表示模拟量信号值;kg为传感器固定系数,通常为(1,10);iq为实际电流值;rg为传感器电阻值;vg为传感器纠偏电压值。
16.信息传递至中央处理计算机1后,中央处理计算机1收集到的5个通道传输的数据总量模型如下:
17.x=x1 x2 x3 x4 x518.其中,x为中央处理计算机数据总量,x1至x5分别为5个通道的数据量。
19.以第一通道为例,其数据量取决于其单根线路数据量和线路总数,模型为:
[0020][0021]
其中,x1为第一通道数据量;为第一通道即信息接收装置的单条线路数据量;n为第一通道线路总数。
[0022][0023]
其中,ka为信息接收装置固定参数系数;为第一通道单条线路在t时刻下的数据量,为模拟量信号值的累积,模型如下:
[0024][0025]
结合上述推导模型公式,可得到第一通道数据量与实际电流量、传感器的对应模型公式:
[0026][0027]
故中央处理计算机1收集到的5个通道传输的数据总量模型可处理为:
[0028][0029]
其中,n、m、o、p、q分别代表第1至第5通道的线路总数。
[0030]
中央处理计算机1会接收到系统5个通道同时发送的信息,在此情况下,中央处理计算机1如何判别分析接收到的信息来源尤为重要,若不能准确的分析判定,则会导致信息传输不畅,指令无法实现的现象,故在中央处理计算机1中设定判定模型,不同装置对应的单根线路数据量做不同的数值范围判定,中央处理计算机1根据采集到的单根线路数据量进行判定数据通道来源,模型如下:
[0031]
通道1:范围为(0,2);
[0032]
通道2:范围为(3,10);
[0033]
通道3:范围为(11,50);
[0034]
通道4:范围为(51,150);
[0035]
通道5:范围为(151,300)。
[0036]
本发明的有益效果:
[0037]
(1)本发明采用独特的设计思路,通过整个调试系统的构建,实现对无人机整机的动作指令以及状态监控,从无人机起始,通过信息接收装置、中央处理计算机以及交互式控制设备,行程信息输出与输入的闭环,完全避免信息传输开环带来的信息丢失等严重后果,最大程度保护无人机的安全;
[0038]
(2)本发明设置的外部接口能实现与内部网络连接以及文件输出,在有需求的情况下,将检测数据以上述两种方式输出供调试人员以及检验人员使用,此种方式节省原有的信息输出手续办理时间以及流程审批,实时输出信息,大幅度提高工作效率。
附图说明
[0039]
图1为无人机固定站位调试系统示意图。
[0040]
图中:1中央处理计算机;2信息接收装置;3信息显示装置;4内网输出装置;5交互式控制设备;6信息输出装置;21接收天线;22信息传输组件;31信号解析组件;32显示屏;41数据整合装置;42内部网络接口;61信号解析装置;62文件输出装置。
具体实施方式
[0041]
以下结合实施例和附图进一步解释本发明的具体实施方式,但不用于限定本发
明。
[0042]
如图1所示的无人机固定站位调试系统,具体实施步骤如下:
[0043]
(1)通过飞机吊挂将无人机放置于固定调试站位,由千斤顶支撑,待飞机状态稳定后通过千斤顶将飞机整体调整为水平状态;
[0044]
(2)启动无人机及本发明所述调试系统,使无人机与调试系统连接成功,确保信息接收装置2、交互式控制设备5与无人机的连接;
[0045]
(3)通过交换式控制设备5,手动或通过预先设定的自动调试程序,向无人机输出各项操作指令,控制无人机的各活动部件进行各项动作以及实现各项系统功能;
[0046]
(4)操作者可通过显示屏32实时观察无人机通过信息接收装置2反馈至中央处理计算机1的飞机各系统状态以及各项参数信息,对飞机整体情况进行监控,判断飞机各项指标是否异常,飞机状态是否存在问题;
[0047]
(5)调试数据需要传输至内部网络时,通过内网输出装置4,使用网线连接至内网电脑上,实现数据的传输;
[0048]
(6)若需要将实验数据输出纸质版或光盘形式,则通过信息输出装置6实现;
[0049]
(7)系统调试结束后,将调试系统与无人机断开,并将无人机与调试系统关闭,将无人机通过飞机吊挂吊至地面。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。