1.本发明涉及煤矿综掘巷道工作面的悬臂式掘进机智能化控制的技术领域,具体是一种基于智能交互界面的掘进机截割轨迹规划方法。
背景技术:
2.煤矿智能化是煤炭行业高质量发展的核心技术支撑,其中,综掘巷道智能化系统可视可控化是关键,管理信息化是基础,尤其是掘进机基于定位导航的自主作业技术在煤矿智能化建设中居于核心位置,是保证煤矿安全生产、提高劳动效率、提升质量效益的关键。在掘进机开采煤炭形成巷道断面的过程中,截割轨迹规划是重要环节。不合理的截割轨迹规划会导致截割装备姿态频繁调整,增加截割部的截割能耗并产生较大的欠挖面积,影响整体断面成形质量。因此,对掘进机截割轨迹进行合理规划对于降低掘进设备损耗、提高断面成形质量具有重要意义。
3.目前,大多数煤矿掘进巷道断面形状主要分为矩形、梯形和拱形,关于截割工艺路径根据断面形状不同发生改变,其设置方法主要依赖人工操作,存在设置数据繁琐的问题,不能根据巷道断面的地质情况任意修改预先设置的断面截割工艺路径。因此,本发明为有效解决巷道断面成形轨迹规划问题,以断面坐标数据精度差作为影响截割轨迹规划的主要因素之一,建立了智能交互界面栅格化断面图幅的控制方法,提高截割轨迹规划的灵活性、便捷性、准确性。
技术实现要素:
4.本发明的目的在于提供一种基于智能交互界面的掘进机截割轨迹规划方法,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:
6.一种基于智能交互界面的掘进机截割轨迹规划方法,包括如下步骤:
7.步骤一、配置ethernet通讯网络主站控制系统,内置嵌入综掘智能化监控软件平台作为人机交互界面,并提供巷道断面截割工艺路径规划入口通道,触发后以弹窗形式呈现此功能界面;
8.步骤二、在人机交互界面,建立互相垂直且有公共原点的两条数轴,构成x、y轴直角坐标系,坐标轴提供刻度标尺,x、y坐标区域内以刻度标尺为分辨率进行栅格化处理,建立栅格图幅划分待截割巷道断面,x、y坐标刻度标尺数据为预设断面尺寸数据自动生成,栅格最小分辨率为预设截割头半径尺寸;
9.步骤三、根据矿方提供的截割工艺规程中,截割断面尺寸和截割工艺路径,在栅格化图幅区域内的x、y轴交叉点或单元栅格中点处点击进行选取截割轨迹中每段起始点与结束点并生成拐点坐标数据;
10.每段截割轨迹点取完成后,栅格化图幅将自动生成两点坐标连线,并进行点选下一段截割轨迹拐点坐标,直至点选完成全部截割工艺路径的规划同时生成坐标连线,同时
将数据进行编号打包,通过网络通讯协议发送至下位机执行控制器中驱动截割部进行截割掘进作业;
11.选点坐标过程中,人机交互界面具备对点选坐标数据进行识别与判断的自动识别栅格交点优化控制策略,即通过人工点选坐标数据分别与巷道边界、临近x、y轴栅格交叉点进行识别与判断,并配比控制算法对点选的轨迹坐标数据进行优化解算;
12.作为本发明进一步的方案:在构建x、y轴二维直角坐标系时,设掘进巷道断面宽度为x,高度为y;坐标内区域进行栅格化图幅处理,建立栅格图幅划分待截割巷道断面各点坐标,栅格最小分辨率为截割头半径尺寸r,每个单元栅格以截割头半径作为边长,栅格面积为 s=r
×
r,掘进巷道断面栅格图幅总数为通过计算求得栅格坐标系并建立完整的栅格图幅。
13.作为本发明进一步的方案:在栅格图幅区域内点选截割轨迹坐标点过程中,根据巷道形状的不同或截割工艺规程要求,出现两点坐标连线生成为斜线截割轨迹的工艺路径时,人机交互界面具有分段解算的控制策略,采用以截割头半径为最小步距,判断x、y坐标轴距离,将两点坐标轨迹连线距离最长的坐标轴分割成n条线段,同时将计算求得的线段数量n代入另一个坐标轴中进行优化解算,求得每组线段两点坐标数据,并生成x、y坐标轴分割后的n 组起点与终点坐标差值;
14.设斜线截割轨迹起点坐标[xa,ya],终点坐标[xb,yb],截割头半径为r,那么,截割轨迹x坐标轴分段坐标数据计算公式如下:
[0015][0016]
截割轨迹y坐标轴分段坐标数据计算公式如下:
[0017][0018]
在公式中,trunc为截小数取整函数,xn,yn为x,y坐标轴分割解算后其中一组分段坐标起点与终点的差值;
[0019]
设需要执行的当前分段坐标的终点为x
bn
,每组分段坐标终点的计算公式如下:
[0020][0021]
在公式中,x
ra
为前一组水平截割轨迹或斜线轨迹分段解算的x轴的终点坐标,y
ra
为前一组垂直截割轨迹或斜线轨迹分段解算的x轴的终点坐标。
[0022]
与现有技术相比,本发明的有益效果是:
[0023]
本发明通过智能监控软件交互界面,提供巷道断面参数与截割工艺路径规划功能。界面中建立互相垂直且有公共原点的两条数轴,构成x、y轴直角坐标系,坐标内区域进行栅格化处理,建立栅格图幅划分待截割巷道断面。可规划的巷道尺寸标定x、y坐标轴刻度值。在栅格区域内,使用任意选点的方式点取截割工艺路径中每段起始点与结束点坐标数据,每段截割轨迹选点完成后自动生成两点坐标连线,以此类推直至完成全部截割工艺路径的规划。选点坐标过程中,交互界面内置自动识别栅格交叉点功能,以及出现斜线或不规则的截割工艺路径坐标系,采用以截割头半径为最小步距进行x、y坐标数据分段解算的控
制策略,实现对截割轨迹进行优解处理。
[0024]
本发明提供了一种基于监控软件平台的交互界面,人员操作选点断面坐标,智能连线规划截割轨迹的方法,针对煤矿综掘巷道存在的地质条件复杂、巷道形状不同、截割工艺轨迹规划繁琐、效率低、对掘进设备消耗大的问题,对现有的智能化综掘机中自动截割的轨迹规划方法进行优化。实现作为ethernet主站控制系统内嵌智能监控软件以选点连线的方式生成截割轨迹规划坐标点。
[0025]
本发明能够有效利用智能化综掘监控交互界面,对智能化掘进装备系统的自主作业截割的轨迹进行有效的规划,不受掘进断面形状约束,根据不同断面尺寸定制构建栅格坐标图幅,利用选点连线的方式构建不同截割工艺路径,实现在智能化的掘进作业过程中根据断面夹矸分布情况,进行人工在栅格断面中进行坐标选点连线,实时调整并规划截割工艺路径。
附图说明
[0026]
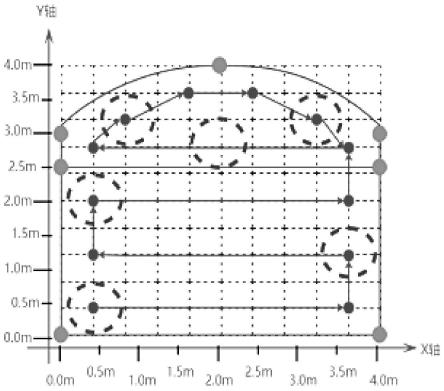
图1为栅格图幅规划截割轨迹示意图示意图。
[0027]
图2为栅格化图幅截割断面示意图。
[0028]
图3为栅格图幅规划矩形巷道截割轨迹示意图。
[0029]
图4为驱动截割控制时与规划的轨迹对比图。
[0030]
图5为斜线截割轨迹分段控制算法示意图。
具体实施方式
[0031]
下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
[0032]
请参阅图1-5,一种基于智能交互界面的掘进机截割轨迹规划方法,包括如下步骤:
[0033]
步骤一、配置ethernet通讯网络主站控制系统,内置嵌入综掘智能化监控软件平台作为人机交互界面,并提供巷道断面截割工艺路径规划入口通道,触发后以弹窗形式呈现此功能界面;
[0034]
步骤二、在人机交互界面,建立互相垂直且有公共原点的两条数轴,构成x、y轴直角坐标系,坐标轴提供刻度标尺,x、y坐标区域内以刻度标尺为分辨率进行栅格化处理,建立栅格图幅划分待截割巷道断面,x、y坐标刻度标尺数据为预设断面尺寸数据自动生成,栅格最小分辨率为预设截割头半径尺寸;
[0035]
步骤三、根据矿方提供的截割工艺规程中,截割断面尺寸和截割工艺路径,在栅格化图幅区域内的x、y轴交叉点或单元栅格中点处点击进行选取截割轨迹中每段起始点与结束点并生成拐点坐标数据;
[0036]
每段截割轨迹点取完成后,栅格化图幅将自动生成两点坐标连线,并进行点选下一段截割轨迹拐点坐标,直至点选完成全部截割工艺路径的规划同时生成坐标连线,同时将数据进行编号打包,通过网络通讯协议发送至下位机执行控制器中驱动截割部进行截割掘进作业;
[0037]
选点坐标过程中,人机交互界面具备对点选坐标数据进行识别与判断的自动识别栅格交点优化控制策略,即通过人工点选坐标数据分别与巷道边界、临近x、y轴栅格交叉点
进行识别与判断,并配比控制算法对点选的轨迹坐标数据进行优化解算;
[0038]
进一步的,在构建x、y轴二维直角坐标系时,设掘进巷道断面宽度为x,高度为y;坐标内区域进行栅格化图幅处理,建立栅格图幅划分待截割巷道断面各点坐标,栅格最小分辨率为截割头半径尺寸r,每个单元栅格以截割头半径作为边长,栅格面积为s=r
×
r,掘进巷道断面栅格图幅总数为通过计算求得栅格坐标系并建立完整的栅格图幅。
[0039]
进一步的,在栅格图幅区域内点选截割轨迹坐标点过程中,根据巷道形状的不同或截割工艺规程要求,出现两点坐标连线生成为斜线截割轨迹的工艺路径时,例如,梯形断面或拱形断面在上半部分进行标记截割轨迹,需要同时驱动截割部的升降、回转油缸动作,由于液压系统流量、电液控阀组电流值或机械设计方面等因素,无法将升降、回转两套驱动速率实现完全匹配,导致驱动截割作业时的轨迹,不能完全匹配点选坐标规划的理想中的斜线截割轨迹,从而造成断面欠挖或超挖的违反工艺规程的失误操作,如说明书附图4所示,直线连线为理想截割轨迹,折弯两段连线为实际驱动截割作业时的轨迹。为避免此类情况交互界面软件具有将分段解算的控制策略,以轨迹分段数量换取截割精度使驱动误差最小化,如说明书附图5图所示,圆点为轨迹连线分段解算后的每组坐标点数据,,弯曲轨迹连线为实际驱动截割作业时存在驱动误差的反馈截割轨迹。
[0040]
人机交互界面具有分段解算的控制策略,采用以截割头半径为最小步距,判断x、y坐标轴距离,将两点坐标轨迹连线距离最长的坐标轴分割成n条线段,同时将计算求得的线段数量n代入另一个坐标轴中进行优化解算,求得每组线段两点坐标数据,并生成x、y坐标轴分割后的n组起点与终点坐标差值;
[0041]
设斜线截割轨迹起点坐标[xa,ya],终点坐标[xb,yb],截割头半径为r,那么,截割轨迹x坐标轴分段坐标数据计算公式如下:
[0042][0043]
截割轨迹y坐标轴分段坐标数据计算公式如下:
[0044][0045]
在公式中,trunc为截小数取整函数,xn,yn为x,y坐标轴分割解算后其中一组分段坐标起点与终点的差值;
[0046]
设需要执行的当前分段坐标的终点为x
bn
,每组分段坐标终点的计算公式如下:
[0047][0048]
在公式中,x
ra
为前一组水平截割轨迹或斜线轨迹分段解算的x轴的终点坐标,y
ra
为前一组垂直截割轨迹或斜线轨迹分段解算的x轴的终点坐标。
[0049]
本发明涉及一种基于监控软件平台的交互界面,人员操作在栅格化断面图幅中选点坐标智能连线规划截割轨迹的方法。交互界面构建x、y轴直角坐标系并进行栅格化处理。通过点取截割工艺路径中每段起始点与结束点坐标,自动生成两点坐标连线并完成截割工艺路径规划。具备自动识别栅格中点及交叉点以及斜线截割工艺路径采用轨迹坐标分段解算的控制策略,实现对截割轨迹进行优解处理。
[0050]
本发明的工作原理是:配置ethernet通讯网络主站控制单元上位机,嵌入综掘智能化监控软件平台,提供断面参数及截割工艺路径规划设置界面,为避免掘进机截割轨迹规划方法准确度低、操作复杂的问题,准确表示掘进巷道断面尺寸及截割坐标位置,建立互相垂直且有公共原点的两条数轴构成直角坐标系,轴坐标分别提供刻度标尺,坐标内区域进行栅格化处理,建立栅格图幅划分待截割巷道断面。坐标刻度标尺上限值,可根据断面最大尺寸任意选点画线方式定制,栅格断面标尺分辨率采用截割头半径r,在x、y坐标轴的栅格区域内,采用任意选点进行两点连线的方式规划截割工艺路径,在栅格中选择坐标点操作时,软件界面集成自动识别栅格交点功能。选点规划过程中出现如说明书附图1所示,在断面拱形区域选取坐标点生成轨迹连线为斜线,即x、y轴坐标同时变化,采用以截割头半径为最小步进距离进行x、y坐标数据分段解算的控制策略,以确保驱动截割部准确的按照规划的工艺路径坐标进行截割作业。
[0051]
本发明能够有效利用智能化综掘监控交互界面,对智能化掘进装备系统的自主作业截割的轨迹进行有效的规划,不受掘进断面形状约束,根据不同断面尺寸定制构建栅格坐标图幅,利用选点连线的方式构建不同截割工艺路径,实现在智能化的掘进作业过程中根据断面夹矸分布情况,进行人工在栅格断面中进行坐标选点连线,实时调整并规划截割工艺路径。
[0052]
上面对本专利的较佳实施方式作了详细说明,但是本专利并不限于上述实施方式,在本领域的普通技术人员所具备的知识范围内,还可以在不脱离本专利宗旨的前提下做出各种变化。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。