1.实施例涉及一种相机模块。
背景技术:
2.三维内容正被应用于许多领域,例如教育、制造、自动驾驶以及游戏和文化,要获取三维内容,就需要深度图。深度图是指代表空间距离的信息,以及代表另一个点相对于二维图像中一个点的透视信息。作为获取深度图的方法,使用了在物体(object,对象)上投射红外(ir)结构光的方法、使用立体相机的方法、飞行时间(tof)方法等。
3.tof方法或结构光方法使用红外波长范围内的光,最近,人们已经尝试使用红外波长范围的特性进行生物特征认证。例如,众所周知,分布在手指等部位的纹理(veins)形状从胎儿起在一生中都不会改变,并且因人而异。因此,可以使用配备红外光源的相机装置来识别纹理图案。为此,在捕获手指之后,可以通过基于手指的颜色和形状去除背景来检测每个手指,并且可以从检测到的每个手指的颜色信息中提取每个手指的纹理图案。换句话说,手指的平均颜色、分布在手指上的纹理的颜色以及手指上褶皱的颜色可能彼此不同。例如,手指上分布的纹理颜色可能比手指的平均颜色更浅,手指上褶皱的颜色可能比手指的平均颜色更深。利用这些特征,可以计算每个像素的接近纹理的值,并且可以使用计算结果提取纹理图案。此外,可以通过将提取的每个手指的纹理图案与预先登记的数据进行比较来识别个体。
4.然而,当前的tof方法存在一个问题,即每帧可能获得的信息(即分辨率)较低。
5.为了提高分辨率,可以增加传感器的像素数量,但在这种情况下,存在一个问题,即相机模块的体积和制造成本大大增加。
6.此外,当输出光信号的模式根据距离被修改时,存在伤害人眼等问题。此外,还有一个问题是能量效率下降。
技术实现要素:
7.【技术问题】
8.本实施例旨在提供使用飞行时间(tof)方法以提高分辨率的相机模块。
9.此外,本实施例旨在提供可执行超分辨率(sr,super resolution)技术的相机模块。
10.此外,本实施例旨在提供具有减少振荡的相机模块。
11.一个实施例旨在提供一种相机设备,其包括被配置为修改光信号形状的驱动单元。
12.本实施例旨在提供一种相机模块,其通过容易检测诸如透镜和透镜模块损坏之类的异常,防止人体或类似物受到光信号能量的伤害。
13.本实施例的目的不限于此,还包括以下将描述的可以从配置或实施例确定的目的或效果。
14.【技术方案】
15.根据本发明实施例的相机模块包括:光源;光学单元,被配置成以平面形式或多点形式转换从光源输出的光,并输出转换后的光;以及图像传感器,其中光源被周期性地打开/关闭,当打开光源时,光学单元移动以位于第一位置处,并且当关闭光源时,光学单元移动到初始位置。
16.在打开光源之前,光学单元可以在预定时间之前从初始位置朝向第一位置移动。
17.当光学单元位于初始位置时,光学单元可以以平面形式和多点形式中的任意一种形式输出光,当光学单元置于第一位置时,光学单元可以以平面形式和多点形式中的另一种形式输出光。
18.当光学单元位于初始位置和第一位置中的任意一者处时,光学单元与光源之间的距离可以等于光学单元的背焦距(back focal distance)。
19.第一位置可以包括1-a位置和2-b位置,当光学单元位于1-a位置时,光学单元可以多点形式输出光,当光学单元位于1-b位置时,光学单元可以以平面形式输出光。
20.光源与1-a位置处的光学单元之间的距离可以小于光源与初始位置处的光学单元之间的距离,并且光源与1-b位置处的光学单元之间的距离可以大于光源与初始位置处的光学单元之间的距离。
21.初始位置与1-a位置之间的距离可能小于初始位置与1-b位置之间的距离。
22.光源与1-a位置处的光学单元之间的距离可以大于光源与初始位置处的光学单元之间的距离,并且1-b位置处的光源与光学单元之间的距离可以大于1-a位置处的光源与光学单元之间的距离。
23.1-a位置与初始位置之间的距离可能小于1-b位置与初始位置之间的距离。
24.光源与初始位置处的光学单元之间的距离可以大于光源与1-b位置处的光学单元之间的距离,并且1-b位置的光源和光学单元之间的距离可以大于1-a位置处的光源与光学单元之间的距离。
25.相机模块还可以包括:驱动单元,其被配置为竖直地(vertically)移动光学单元;以及控制单元,其被配置为输出用于控制光源输出光的光照射信号,以及输出到驱动单元用于移动光学单元的驱动信号,其中,在输出光照射信号之前可以输出驱动信号,并且在打开光源之前可以移动光学单元以位于第一位置处。
26.关闭光源之后,光学单元可以移动到初始状态。
27.光照射信号可以具有一帧周期(frame period)。
28.图像传感器可以根据曝光信号进行曝光。
29.驱动信号可以至少部分地与曝光信号重叠,并且驱动信号可以在曝光信号关闭之后的预定时间之后被打开。
30.驱动信号可以包括在打开光照射信号之前打开的第一区段(section),以及与其中打开光照射信号的区段重叠的第二区段。
31.第一区段可以与空闲(idle,停工)区段重叠。
32.第一区段的长度可以调整为对应于平面形式或点形式。
33.驱动信号可以具有彼此相反的对应于平面形式的极性和对应于点形式的极性。
34.根据一个实施例的相机模块包括:光源;设置在光源上的光学单元;以及图像传感
器,其中光源由光照射信号控制,并且当光照射信号打开时,光学单元移动以位于特定位置,当光照射信号关闭时,光学单元移动到初始位置。
35.光学单元可以通过驱动信号移动,光照射信号可以具有帧周期,并且驱动信号可以包括在光照射信号打开之前打开的第一区段,以及与其中光照射信号打开的区段重叠的第二区段。
36.根据一个实施例的驱动方法包括:光照射信号,发送用于控制光源开/关;以及输出驱动信号,在光照射信号打开光源时用于将光学单元移动到第一位置,并在关闭光源时用于将光学单元移动到初始位置,其中,光学单元以平面形式或多点形式转换从光源输出的光,并输出转换后的光。
37.根据一个实施例的相机模块包括:光源;光控制单元,其被配置为控制光源的输出;光学单元,被设置在从光源输出的光的路径上;驱动控制单元,其被配置为控制光学单元的位置;图像传感器,包括多个像素;以及控制单元,其中图像传感器输出与像素积分时间(integration time,集成时间)对应的触发信号,控制单元接收触发信号并向驱动控制单元输出驱动信号,驱动控制单元根据驱动信号的打开或关闭将光学单元的位置移动到初始位置或第一位置,在关闭触发信号之后打开驱动信号,即使在触发信号从关闭状态被打开之后,驱动信号也保持为打开状态,并且当触发信号从打开状态变为关闭状态时,或者在关闭触发信号之后,驱动信号被关闭。
38.根据一个实施例的相机模块包括:光发射单元;光接收单元;以及控制单元,其中,光接收单元包括倾斜致动器、线圈单元和磁体单元,所述线圈单元和磁体单元被配置为驱动倾斜致动器,所述磁体单元包括第一磁体和第二磁体,线圈单元包括面对第一磁体的第一线圈和面对第二磁体的第二线圈,控制单元输出输入到第一线圈的第一输出信号和输入到第二线圈的第二输出信号,其中,在比倾斜致动器的自然振荡周期短的时间内,第一输出信号和第二输出信号包括具有第一幅度(magnitude)的第一信号,和第一信号之后具有比第一幅度大的幅度的第二信号。
39.控制单元可以从光接收单元接收触发信号,并且第一输出信号和第二输出信号可以响应于触发信号从控制单元输出。
40.第一信号的周期可以是第一输出信号和第二输出信号中倾斜致动器自然振荡周期的0.6倍至0.9倍。
41.磁体单元可以包括第三磁体和第四磁体,其中第三磁体可以与第一磁体相对设置,第四磁体可以与第二磁体相对设置;线圈单元可以包括面对第三磁体的第三线圈和面对第四磁体的第四线圈。
42.第一磁体与第一线圈之间的相互作用产生的力的方向可以与第二磁体与第二线圈之间的相互作用产生的力的方向相反,并且,第三磁体与第三线圈之间的相互作用产生的力的方向可以与第四磁体与第四线圈之间的相互作用产生的力的方向相反。
43.低电平电流、高电平电流和参考电平电流中的任意一者都可以应用于第一输出信号和第二输出信号,并且参考电平电流可以是不施加电流的电平。
44.第一线圈和第三线圈可以设置在反平行结构中,其中流过线圈的电流方向彼此相反,第二线圈和第四线圈可以设置在反平行结构中,其中流过线圈的电流方向彼此相反。
45.第一输出信号可以被输入到第三线圈,第二输出信号可以被输入到第四线圈,并
且触发信号可以包括以相同的帧周期按顺序接收的第一触发信号到第四触发信号。
46.第一输出信号可以包括对应于第一触发信号的1-1输出信号和对应于第三触发信号的1-2输出信号,并且第二输出信号可以包含对应于第二触发信号的2-1输出信号以及对应于第四触发信号的2-2输出信号,其中,2-1输出信号和2-2输出信号可以具有相反的方向。
47.2-1输出信号可以应用于1-1输出信号与1-2输出信号之间,1-2输出信号可以应用于2-1输出信号与2-2输出信号之间。其中1-1输出信号和1-2输出信号可以具有相反的方向,2-1输出信号和2-2输出信号可以具有相反的方向。
48.第一输出信号和第二输出信号中的至少一者可以应用于线圈单元。
49.与触发信号相比,输出信号可能具有预定的延迟。
50.光接收单元可以包括:光学构件,由物体反射的反射光信号通过该光学构件;弹性构件,连接到所述光学构件;以及图像传感器,其被配置为接收反射光信号并生成电信号,其中倾斜致动器可以倾斜光学构件,以按照预定的规则反复移动通过光学构件的反射光信号的路径。
51.倾斜致动器可以在第一至第四倾斜序列中重复移动,其中通过光学构件的反射光信号被设置在图像传感器上的不同位置。
52.光学构件可以在第一至第四倾斜序列中在不同的对角线方向和水平方向上移动。
53.相机模块还可以包括图像合成部件,该图像合成部件被配置为通过合成对应于第一至第四倾斜序列的图像来生成高分辨率图像。
54.光学构件可以在平行于图像传感器设置的状态下,相对于反射光信号的路径,在图像传感器的对角线方向和水平方向中的任意一个方向上移动。
55.倾斜致动器可以倾斜光学构件,以便按顺序重复执行第一至第四倾斜序列的其中任何组合。
56.根据一个实施例的相机模块包括:光发射单元;光接收单元;以及控制单元,其中光接收单元包括倾斜致动器、线圈和磁体,所述线圈和磁体配置为驱动倾斜致动器,所述磁体包括第一磁体和第二磁体,所述线圈包括面对第一磁体的第一线圈和面对第二磁体的第二线圈,控制单元输出输入到第一线圈的第一输出信号和输入到第二线圈的第二输出信号,其中第一输出信号和第二输出信号包括具有第一幅度的第一信号和具有比第一信号之后的第一幅度大的幅度的第二信号,当第一输出信号的第二信号被维持或第一输出信号第二信号被关闭时,第二输出信号的第一信号被输出。
57.在比致动器的自然振荡周期短的时间内,第一输出信号和第二输出信号可以包括具有第一幅度的第一信号和第一信号之后具有比第一幅度大的幅度的第二信号。
58.【有利效果】
59.根据一实施例,相机模块可以根据各种应用的需求灵活地驱动,根据各种变量,如与物体的距离和分辨率,来改变光的光型或光信号。
60.此外,根据本实施例,可以通过容易地检测诸如透镜和透镜模块的损坏等异常,来防止光信号的能量对人体或类似物的伤害。
61.根据本实施例,可以降低功耗。
62.通过本实施例,即使不显著增加传感器的像素数量,也可以获得高分辨率的深度
图。
63.此外,可以通过超分辨率(sr)技术从根据本实施例的相机模块获得的多个低分辨率图像中获取高分辨率图像。
64.此外,在执行sr技术时,可以通过减少振荡提高图像精度来制造相机模块。
65.本发明的各种有益优点和效果不限于上述内容,在描述本发明的具体实施例的过程中,将更易理解。
附图说明
66.图1是根据一实施例的相机模块的立体图。
67.图2是沿着图1中的线i-i’截取的剖视图。
68.图3是根据实施例的相机模块的分解立体图。
69.图4是示出根据实施例的光发射单元的壳体的视图。
70.图5是示出根据实施例的光发射单元的第一光学单元和第一透镜筒的视图。
71.图6是示出根据实施例的光发射单元的驱动磁体部件和驱动线圈部件的视图。
72.图7是示出根据实施例的光发射单元的弹性部件的联接的视图。
73.图8是示出根据实施例的光发射单元的第一弹性构件的视图。
74.图9是示出根据实施例的光发射单元的第二弹性构件的视图。
75.图10是示出根据实施例的光发射单元的侧基板的一侧的视图。
76.图11是示出根据实施例的光发射单元的侧基板的另一侧的视图。
77.图12是示出根据实施例相机模块的基座的视图。
78.图13是示出根据实施例的光接收单元的第二光学单元和第二透镜筒的视图。
79.图14是示出根据实施例的相机模块的盖的视图。
80.图15是描述根据实施例的光发射单元中的第一光学单元和第一透镜模块的运动的视图。
81.图16是描述根据第一光学单元和第一透镜模块运动的光信号的形式的视图。
82.图17是示出根据第一光学单元和第一透镜模块的运动的光接收单元的图像的示例的视图。
83.图18是描述根据实施例的传感器中生成电信号的过程的视图。
84.图19是描述根据实施例的传感器的视图。
85.图20是根据实施例在传感器中生成一帧的时序图(time diagram)。
86.图21是根据其他实施例在传感器中生成深度图像的一帧周期的时序图。
87.图22是图21中的帧周期内的每个积分时间生成电信号的时序图。
88.图23是图21中的积分时间pl1的时序图。
89.图24是图21中的积分时间pl2的时序图。
90.图25是图21中的积分时间pl3的时序图。
91.图26是图21中的积分时间pl4的时序图。
92.图27a是描述根据实施例的控制单元的驱动的视图。
93.图27b是描述根据第一实施例的光学单元的运动的视图。
94.图27c是描述根据第二实施例的光学单元的运动的视图。
95.图27d是描述根据第三实施例的光学单元的运动的视图。
96.图27e是描述根据第四实施例的光学单元的运动的视图。
97.图27f是描述根据第五实施例的光学单元的运动的视图。
98.图27g是根据实施例的相机模块的框图。
99.图28是描述根据第一实施例的控制单元的驱动的视图。
100.图29是描述用于提供平面形式或点形式的驱动信号的调整的视图。
101.图30是描述用于提供平面形式或点形式的驱动信号的第一示例的视图。
102.图31是描述用于提供平面形式或点形式的驱动信号的第二示例的视图。
103.图32是描述根据第二实施例的控制单元的驱动的视图。
104.图33是描述根据第三实施例的控制单元的驱动的视图。
105.图34是根据其他实施例的相机模块的立体图。
106.图35是根据其他实施例的相机模块的分解立体图。
107.图36a是沿图34中的线a-a’截取的剖视图。
108.图36b是沿图34中的线b-b’截取的剖视图。
109.图36c是沿图34中的线c-c’截取的剖视图。
110.图36d是沿图34中的线d-d’截取的剖视图。
111.图37是根据其他实施例的相机模块的光接收单元的部分配置的立体图。
112.图38是根据其他实施例的相机模块的壳体的立体图。
113.图39是根据其他实施例的相机模块的部分配置的立体图。
114.图40是根据其他实施例的相机模块的基板和线圈的立体图。
115.图41是显示根据各种其他实施例的相机模块的线圈与基板之间的联接的视图。
116.图42是显示根据其他实施例中的相机模块的支架、磁体和光学构件的分解立体图。
117.图43是显示根据其他实施例中的相机模块的支架、磁体和光学构件的分解立体图。
118.图44是图43中另一角度的立体图。
119.图45是根据其他实施例的支架、磁体和光学构件的俯视图。
120.图46是用于描述实施例中磁体与线圈之间的洛伦兹力(lorentz force)的视图。
121.图47是用于描述实施例中光学构件的对角倾斜控制的视图。
122.图48是根据其他实施例的包括弹性构件的相机模块的一部分的立体图。
123.图49是根据其他实施例的包括弹性构件的相机模块的一部分的俯视图。
124.图50是根据修改示例的其他实施例的包括弹性构件的相机模块的一部分的视图。
125.图51是根据其他实施例的相机模块的立体图。
126.图52是沿着图51中的线e-e’截取的剖视图。
127.图53是沿着图51中的线f-f’截取的剖视图。
128.图54是沿着图51中的线g-g’截取的剖视图。
129.图55是描述根据其他实施例的倾斜单元的视图。
130.图56是具体描述倾斜致动器的视图。
131.图57a是用于描述根据第一其他实施例的倾斜单元的驱动序列的视图。
132.图57b是用于描述步骤1中图57a中驱动单元的输出的视图。
133.图57c是用于描述每一帧周期的图57a中的驱动单元输出的视图。
134.图58示出了根据第一其他实施例的光路移动过程。
135.图59是概念上顺序显示根据第一其他实施例的相机模块中的超分辨率(sr)技术所获得的多个图像的概念图。
136.图60是顺序显示根据第一其他实施例的相机模块中的sr技术所获取的第一至第四帧的图像的视图。
137.图61是用于描述sr图像的视图。
138.图62是描述根据第二其他实施例的倾斜单元的驱动序列的视图。
139.图63是描述根据第二其他实施例通过驱动倾斜单元对滤光器倾斜控制的视图。
140.图64是示出根据第二其他实施例的光路移动过程的视图。
141.图65是概念图,概念性地显示根据第二其他实施例的相机模块获得的用于超分辨率(sr)技术的多个图像的顺序。
142.图66是描述根据又一其他实施例的倾斜致动器的视图。
143.图67是描述根据第三其他实施例的倾斜单元的驱动序列的视图。
144.图68是描述根据第四其他实施例的倾斜单元的驱动序列的视图。
145.图69是描述根据修改示例的倾斜单元的驱动序列的视图。
146.图70是示出包括根据实施例的相机模块的光学设备的视图。
具体实施方式
147.在下文中,将参考附图详细描述本发明的示例性实施例。
148.然而,本发明的技术构思并不限于所描述的一些实施例,而是可以以各种不同的形式实现,在不脱离本发明的技术精神范围的情况下,可以通过在实施例之间选择性地联接或替换来使用一个或多个部件。
149.此外,除非明确定义和描述,否则本发明实施例中使用的术语(包括技术和科学术语)可以解释为本发明所属领域的技术人员通常理解的含义,并且可以考虑相关技术的上下文含义来解释诸如词典中定义的术语之类的常用术语的含义。
150.此外,本发明实施例中使用的术语旨在描述实施例,并不旨在限制本发明。
151.在本说明书中,除非短语中另有规定,否则单数形式也可以包括复数形式,当描述为“a和b、c的至少一个(或一个或多个)”时,其可以包括a、b和c的一个或一个以上的所有可能组合。
152.此外,在描述本发明实施例的部件时,可以使用诸如第一、第二、a、b、(a)和(b)等术语。
153.这些术语仅用于区分部件与其他部件,相应部件的本质、序列或顺序不受术语的限制。
154.此外,当描述部件“连接”、“联接”或“连接”到另一个部件时,这可以包括该部件不仅直接连接、联接或连接到另一部件的情况,还包括该部件通过中间插入的其他部件“连接”、“联接”或“连接”到另一部件的情况。
155.此外,当描述为形成或设置在每个部件的“顶部(上方)或底部(下方)”时,顶部(上
方)或底部(下方)不仅包括两个部件相互直接接触的情况,还包括在两个部件之间形成或设置一个或多个其他部件的情况。此外,当表达为“顶部(上方)或底部(下方)”时,这可能还包括一个部件的向上方向和向下方向的含义。
156.在下文中个,将描述根据本实施例的光学设备。
157.光学设备可以包括手机、移动电话、智能手机、便携式智能设备、数码相机、笔记本电脑、数字广播终端、个人数字助理(pda)、便携式多媒体播放器(pmp)和导航系统中的任意一种。然而,光学设备的类型不限于此,并且用于拍摄图像或照片的任何设备均可以包括在光学设备中。
158.光学设备可以包括主体。主体可以是杆(bar)的形式。或者,主体可以具有各种结构,例如滑动式、折叠式、摆动式和旋转式,其中两个或更多子本体联接在一起,可相对移动。主体可以包括形成外部的外壳(罩、壳体或盖)。例如,主体可以包括前外壳和后外壳。光学设备的各种电子部件可以嵌入在前外壳与后外壳之间形成的空间中。
159.光学设备可以包括显示器。显示器可以设置在光学设备主体的一个表面上。显示器可以输出图像。显示器可以输出相机拍摄的图像。
160.光学设备可以包括相机。相机可以包括飞行时间(tof)相机装置。tof相机装置可以设置在光学设备主体的前表面上。在这种情况下,tof相机装置可以用于各种类型的生物识别,例如用于光学设备安全认证的用户面部识别和虹膜识别。
161.在下文中,将参考附图描述根据本实施例的tof相机装置的配置。
162.图1是根据一个实施例的相机模块的立体图,图2是沿着图1中的线i-i’截取的剖视图,图3是根据该实施例的相机模块的分解立体图。
163.参考图1至图3,根据实施例的相机模块10可以包括光发射单元1、光接收单元2、连接单元3、主基板4、延伸基板5、连接基板6和连接器7。此外,根据本实施例的相机模块10可以包括控制单元ct。控制单元ct可以位于光发射单元1、光接收单元2、连接单元3和主基板4中的任意一者上。此外,控制单元ct可以是与下面描述的控制单元相对应的概念,也可以是包含在下面描述的控制单元中的概念。此外,在本说明书中,相机模块可以是仅具有光发射单元1和光接收单元2中的一个的概念。或者,相机模块也可以是包括电连接到光发射单元1和光接收单元2中任意一者的基板(例如,主基板4)的概念。
164.首先,光发射单元1可以是光发射模块、光发射单元、光发射组件或光发射设备。光发射单元1可以产生光或光信号,然后用该光或光信号照射物体。在下文中,光或光信号可以互换使用。此时,光发射单元1可以以脉冲波的形式或连续波的形式生成和输出光信号。连续波可以是正弦波或方波的形式。
165.此外,例如,通过生成脉冲波或连续波形式的光信号,在光信号从物体o反射之后,tof相机装置可以检测从光发射单元1输出的光信号与输入到tof相机装置的光接收单元2的输入光之间的相位差。在本说明书中,输出光可以是指从光发射单元1输出并入射到物体o上的光信号,输入光或反射光可以是指从光发射单元1输出以到达物体o并从物体o反射,然后输入到tof相机装置的光信号。此外,从物体o的视角来看,输出光可以是入射光,输入光可以是反射光。
166.光发射单元1将生成的光信号照射到物体o达预定积分时间。这里,积分时间是指一个帧周期。当生成多个帧时,可以重复一组积分时间。例如,当tof相机装置以20fps的速
度捕捉物体时,积分时间为1/20【秒】。此外,当生成100个帧时,积分时间可以重复100次。相应地,光源也可以在帧周期内发光。
167.此外,光发射单元1可以生成具有不同频率的多个光信号。光发射单元1可以按顺序重复生成具有不同频率的多个光信号。或者,光发射单元1还可以同时生成具有不同频率的多个光信号。
168.光发射单元1可以包括光源ls。光源ls可以产生、输出或照射光。光源ls产生的光可以是波长为770nm至3000nm的红外线。或者,光源ls产生的光可以是波长为380nm至770nm的可见光。光源ls可以包括所有被配置用于产生和输出光的各种元件。例如,光源ls可以包括发光二极管(led)和垂直腔面发射激光器(vertical cavity surface emitting laser,vcsel)。例如,当光源ls是垂直腔面发射激光器时,多个发射器可以以水平地或竖直地设置在与光轴垂直的平面上的形式而形成。此外,当以点形式输出光时,点形式可以对应于发射器的设置形式。例如,当发射器为3x3(宽度x长度)时,点形式的光也可以是3x3。
169.此外,光源ls可以包括多个发光二极管,其具有按规则图案布置的形式。此外,光源ls可以包括有机发光二极管(oled)或激光二极管(ld)。
170.光发射单元1可以包括被配置为调制光的光调制部件。光源ls可以通过一定时间间隔重复闪烁(开/关),以脉冲波或连续波的形式产生光信号。一定时间间隔可以对应于光信号的频率。此外,光源ls的闪烁可以由光调制部件控制。
171.光调制部件可以控制光源ls的闪烁,以控制光源ls产生连续波或脉冲波形式的光信号。光调制部件可以通过频率调制、脉冲调制等控制光源ls以产生连续波或脉冲波形式的光信号。光调制部件可以位于控制单元中。因此,应当理解的是,控制单元可以通过如下所述的控制光调制部件来阻断(关或关闭)或提供(打开)光源的光信号输出。
172.光发射单元1可以包括扩散片(diffuser,扩散器)(未示出)。扩散片(未示出)可以是扩散片透镜。扩散片(未示出)可以设置在光源ls的前面。从光源ls发出的光可以通过扩散片(未示出)入射到物体o上。扩散片可以改变从光源ls发射的光的路径。扩散片(未示出)可扩散光源ls发出的光。扩散片(未示出)也可以位于下文将描述的第一光学单元中。
173.具体地,光发射单元1可以包括上述光源ls、壳体110、第一光学单元120、第一透镜筒130、包括驱动磁体部件140和驱动线圈部件150的驱动单元、弹性部件160、侧基板170和位置传感器180。
174.首先,壳体110可以位于下面描述的盖400内。壳体110可以联接到第一透镜筒130、侧基板170、驱动线圈部件150和弹性部件160,下文将对此进行描述。
175.壳体110可以包括其中的开放式镜筒容纳部件。上述第一透镜筒130和驱动线圈部件150可以位于镜筒容纳部件中。
176.第一光学单元120可以位于壳体110中。第一光学单元120可以由下面描述的第一透镜筒130保持,并且可以通过第一透镜筒130联接到壳体110。
177.第一光学单元120可以由多个光学元件或透镜组成。例如,第一光学单元120可以由多个透镜组成。
178.此外,第一光学单元120可以包括准直器透镜。例如,准直器透镜可以由多个透镜组成,并且可以具有60度到120度的视角(foi)。准直器透镜可以减小光源输出光的发散角。当作为光源的垂直腔面发射激光器(vcesl)的每个孔径的激光发散角为20至25度时,通过
准直器透镜的光的发散角可能为1度或更小。
179.此外,第一光学单元120可以根据预设的复制模式复制从光源ls输出的光信号。因此,第一光学单元120可以包括衍射光学元件(doe)或扩散片透镜。例如,第一光学单元120可以包括光学设备、光学构件或具有微尺度或纳米尺度结构的光学元件。
180.从光源ls向物体发射的光信号(输出光)可以通过第一透镜筒130。第一透镜筒130的光轴和光源ls的光轴可以对齐。此外,第一透镜筒130可以联接到壳体110。此外,第一透镜筒130可以固定到壳体110上。第一透镜筒130可以支持由多个光学元件组成的第一光学单元120。
181.第一透镜筒130可以包括透镜容纳部件131,第一光学单元120位于该透镜容纳部件上。第一透镜筒130可以通过音圈马达等垂直移动,如下所述。换句话说,第一透镜筒130可以通过诸如音圈马达等致动器沿光轴方向垂直移动。因此,如下文将描述,当光源产生的光通过第一透镜筒130时,可以被改变为平面形式或点形式。此外,第一透镜筒130可以包括磁体座槽132,其中驱动磁体部件位于其中。
182.此外,在透镜容纳部件131的侧面上可以形成有螺纹结构,用于与第一光学单元120联接。因此,第一光学单元120可以通过驱动单元与第一透镜筒130一起在壳体110中垂直移动(下文将描述)。然而,第一光学单元120不限于联接结构。
183.此外,侧基板170可以联接到壳体110。侧基板170可以位于壳体110侧面上的基板槽112中。此外,侧基底170可以电连接到主基板4。
184.此外,驱动单元可以包括驱动磁体部件140和驱动线圈部件150。
185.驱动磁体部件140可以包括多个磁体。多个磁体可以位于定位在第一透镜筒130侧面上的磁体座槽132中。
186.驱动磁体部件140可以通过与驱动线圈部件150(将在下面描述)的电磁相互作用,相对于壳体110垂直移动第一透镜筒130和第一光学单元120。因此,可以增加或减少从其下的光源ls到第一光学单元120和第一透镜筒130的分离距离。此外,根据上述分离距离,输出光可以具有以下形式:相对于物体具有平面形式(或表面光源)或点形式(或点光源)的光源。
187.驱动线圈部件150可以包括多个线圈,并且可以位于壳体110的侧面。驱动线圈部件150可以定位为面对驱动磁体部件140。因此,当向驱动线圈部件150施加电流时,第一透镜筒130可以通过驱动线圈部件150与驱动磁体部件140之间的电磁相互作用(例如洛伦兹力)而移动。
188.驱动线圈部件150可以位于形成在壳体110侧面上的每个线圈座部件114中。驱动线圈部件150可以与侧基板170电连接。例如,驱动线圈部件150可以通过电线等电连接到侧基板170。此外,如上所述,由于侧基板170联接到壳体110,因此驱动线圈部件150也可以位于形成在壳体110侧面上的线圈座部件114中,并且可以联接到壳体。在下文中,将对其进行详细描述。
189.弹性部件160可以设置在壳体110上。弹性部件160可以联接到第一透镜筒130和壳体110。壳体110可以联接并固定到主基板4或基座200(下面描述)。或者,第一透镜筒130可以通过上述洛伦兹力相对于壳体110垂直移动。弹性部件160可以为第一透镜筒130或第一光学单元120的垂直运动提供预载。因此,当驱动单元未产生洛伦兹力时,第一透镜筒130可
以保持相对于壳体110的预定位置。此外,即使当驱动单元产生洛伦兹力时,第一透镜筒130与壳体110之间的位置关系也保持在一定范围内,因此可以提高相机模块的可靠性。
190.位置传感器180可以电连接到侧基板170。此外,位置传感器180可以位于侧基板170上。此外,可以设置位置传感器180,使其与上述驱动磁体部件140相隔预定距离。
191.位置传感器180可以包括霍尔传感器或霍尔集成电路(ic)。位置传感器180可以检测驱动磁体部件140的磁力。
192.根据本实施例的位置传感器180可以检测来自驱动磁体部件的磁场强度,并输出第一透镜筒130或第一光学单元120相对于光源ls的位置信息。因此,控制单元可以基于位置传感器180的位置信息确定第一光学单元120或第一透镜筒130的缺陷,并响应于确定结果控制(打开/关闭)光源ls的输出。
193.在实施例中,位置传感器180可以包括多个位置传感器。位置传感器180可以包括两个传感器。位置传感器180可以检测第一透镜筒130和第一光学单元120在光轴方向上的移动。在本说明书中,z轴方向是光轴方向或作为第三方向的垂直方向。此外,x轴方向是垂直于z轴方向的方向,在实施例中,是作为从光发射单元朝向光接收单元的方向的第一方向。此外,y轴方向是与x轴方向和z轴方向垂直的方向,并且是第二方向。下面将对此进行描述。
194.光接收单元2可以是光接收模块、光接收单元、光接收组件或光接收设备,并且可以是相机模块的一个部件。光接收单元2可以接收从光发射单元1发射并从物体反射的光(反射光),并且可以将接收到的光转换为电信号。
195.光接收单元2可以产生与从光发射单元1输出的光信号相对应的输入光。光接收单元2可以与光发射单元1并排设置。光接收单元2可以设置在光发射单元1的旁边。光接收单元2可以与光发射单元1设置在同一方向上。通过这种配置,可以提高光接收单元2中输入光的接收效率。
196.光接收单元2可以在积分周期(integration period,集成周期)内接收反射光,并为此产生电信号。在该实施例中,相机模块可以通过光接收单元2进行直接距离测量或间接距离测量。
197.首先,在直接距离测量的情况下,相机模块可以通过反射光的接收时间点与输出光的输出时间点之间的时间差测量到物体的距离。
198.此外,在间接距离测量的情况下,相机模块可以通过与输出光同步并具有不同相位的参考信号与反射光之间的合成来测量到物体的距离。
199.直接距离测量可能比间接距离测量更容易测量长距离,可能具有相对较高的测量速度,因为切换速度(switching speed)为纳秒级的,并且可能对多个回波有很强的抵抗力。相比之下,间接距离测量的优点在于,与直接距离测量相比,其切换速度较低,但易于测量短距离,可以应用于多个像素,并且用于距离测量的数据量较小。
200.根据本实施例的相机模块可以执行上述直接tof(或对应于直接距离测量)或间接tof(或者对应于间接距离测量)。
201.光接收单元2可以包括第二透镜筒320、第二光学单元310和图像传感器is。
202.第二透镜筒320可以联接到基座2009(下面描述)。第二透镜筒320可以螺纹联接到基座(下面描述)。因此,第二透镜筒320可以包括位于其侧面上的螺纹。第二透镜筒320也可
以与第二光学单元310一体形成。然而,本发明不限于此。
203.第二光学单元310可以联接到第二透镜筒320。第二光学单元310可以通过第二透镜筒320联接到基座200。第二光学单元310可以通过各种联接方法联接到第二透镜筒320上。如上文所述,第二光学单元310可以通过与第二透镜筒320的螺纹联接形成。
204.第二光学单元310可以包括多个透镜。此外,第二光学单元310可以与下面的图像传感器is对齐。因此,通过第二光学单元310的反射光可以由图像传感器is接收。
205.图像传感器is可以检测反射光。此外,图像传感器is可以检测反射光并将检测到的反射光输出为电信号。在实施例中,图像传感器is可以检测波长与光源ls输出的光的波长相对应的光。例如,图像传感器is可以检测红外线。或者,图像传感器is可以检测可见光。图像传感器is可以包括被配置为感测光线的各种图像传感器。
206.在实施例中,图像传感器is可以包括:像素阵列,该像素阵列被配置为接收通过第二透镜筒320和第二光学单元310的光,并将接收到的光转换为与光对应的电信号;驱动电路,其被配置为驱动像素阵列中包括的多个像素;以及读出电路,其被配置为读取每个像素的模拟像素信号。通过比较模拟像素信号和参考信号,读出电路可以通过模数转换生成数字像素信号(或图像信号)。这里,包括在像素阵列中的每个像素的数字像素信号可以构成图像信号,并且由于图像信号在帧单元中被传输,因此可以被定义为图像帧。换句话说,图像传感器可以输出多个图像帧。
207.此外,光接收单元2还可以包括图像合成部件。图像合成部件可以包括图像处理器,其被配置为从图像传感器is接收图像信号,并处理(例如,插值和帧合成)图像信号。具体而言,图像合成部件可以使用并将多个帧的图像信号(低分辨率)合成为一个帧的图像信号(高分辨率)。换句话说,图像合成部件可以合成包括在从图像传感器is接收的图像信号中的多个图像帧,并将合成结果生成为合成图像。由图像合成部件生成的合成图像的分辨率可以具有比从图像传感器is输出的多个图像帧更高的分辨率。换句话说,图像合成部件可以通过超分辨率(sr)技术产生高分辨率图像。多个图像帧可以包括通过滤光器f和f’的移动而改变为不同光路而生成的图像帧。图像合成部件可以位于光接收单元2的内部或外部。上述超分辨率可以通过在光接收单元2中倾斜的光学构件来实现。因此,在本说明书中,相机模块可以具有也可以不具有被配置为倾斜光接收单元2中的光学构件的设备。下面将详细描述倾斜光接收单元2中的光学构件来实现超分辨率的配置。
208.滤光器f和f’可以联接到基座200。滤光器f和f’可以设置在第一透镜筒130与光源ls之间,或者设置在第二透镜筒320与图像传感器is之间。因此,滤光器f和f’可以设置在物体与图像传感器is之间的光路上,或设置在物体与光源ls之间的光路上。滤光器f和f’可以过滤具有预定波长范围的光。
209.滤光器f和f’可以通过具有特定波长的光。换句话说,滤光器f和f’可以通过反射或吸收特定波长以外的光来阻挡光。例如,滤光器f和f’可以通过红外线并阻挡红外线以外波长的光。或者,滤光器f和f’可以通过可见光并阻挡可见光以外波长的光。滤光器f和f’可以是红外线带通滤光器,因此,滤光器f和f’只能通过红外线。然而,本发明不限于这些功能。或者,光学构件可以是与透镜模块分离的单独聚焦固定透镜或可变聚焦透镜(例如,液体透镜)。
210.此外,滤光器f和f’是可移动的。在实施例中,滤光器f和f’可以被倾斜。当滤光器f
和f’倾斜时,可以调整光路。当滤光器f和f’倾斜时,入射到图像传感器is上的光路可能会改变。例如,光接收单元2中的滤光器f’可以改变入射光的视场(fov)的角度或fov的方向。此外,在实施例中,滤光器f和f’可以通过改变滤光器f和f’倾斜时光线进入的路径来实现高分辨率飞行时间(tof)。
211.盖400可以是支架。盖400可以包括“盖罐(cover can)”。盖400可以设置为围绕光发射单元1和光接收单元2。盖400可以联接到壳体110和基座200。盖400可以容纳光发射单元1和光接收单元2。因此,盖400可以位于相机模块的最外侧。
212.此外,盖400可以是非磁性物质。此外,盖400可以由金属制成。此外,盖400可以由金属板制成。
213.盖400可以连接到主基板4的接地部分。因此,盖400可以接地。此外,盖400可以阻挡电磁干扰(emi)。此时,盖400可以被称为“emi屏蔽罐”。盖400作为最终组装的部件可以保护产品免受外部撞击。盖400可以由厚度小、强度高的材料制成。
214.此外,在根据实施例的相机模块10中,光发射单元1和光接收单元2可以设置在主基板4(印刷电路板(pcb))上。主基板4可以电连接到光发射单元1和光接收单元2。
215.此外,在相机模块10中,连接部件3可以电连接到主基板4。连接部件3可以联接到光学设备的配置。连接部件3可以包括连接到光学设备配置的连接器7。连接部件3可以包括延伸基板5,连接器7在其上设置并连接到连接基板6。延伸基板5可以是pcb,但不限于此。
216.此外,在相机模块中,连接基板6可以连接主基板4和连接部件3的延伸基板5。连接基板6可以具有柔性。连接基板6可以是柔性印刷电路板(柔性pcb(fpcb))。
217.此外,主基板4、连接基板6和延伸基板5可以整体或单独形成。
218.相机模块可以包括加强板8。加强板8可以包括加强件。加强板8可以设置在主基板4的下表面上。加强板8可以由不锈钢制成。
219.此外,光接收单元2可以包括透镜驱动设备。换句话说,光接收单元2可以包括音圈马达(vcm)。此外,光接收单元2可以包括透镜驱动马达。此外,光接收单元2可以包括透镜驱动致动器。通过该配置,如上所述,根据实施例的光接收单元2可以使滤光器f’倾斜。此外,当滤光器f’倾斜时,通过滤光器f和f’的输入光的光路可能会按照预定的规则反复移动。因此,光接收单元2可以使用由图像传感器根据滤光器f’的倾斜转换的多个图像信息输出高分辨率图像信息,并将输出的图像信息提供给外部光学设备。
220.图4是示出根据实施例的光发射单元的壳体的视图,图5是示出根据实施例的光发射单元的第一光学单元和第一透镜筒的视图,图6是示出根据实施例的光发射单元的驱动磁体部件和驱动线圈部件的视图,图7是示出根据实施例的光发射单元的弹性部件的联接的视图,图8是示出根据实施例的光发射单元的第一弹性构件的视图,图9是示出根据实施例的光发射单元的第二弹性构件的视图,图10是示出根据实施例的光发射单元的侧基板的一侧的视图,图11是示出根据实施例光发射单元的侧基板的另一侧的视图,图12是示出根据实施例的相机模块的基座的视图,图13是示出根据实施例的光接收单元的第二光学单元和第二透镜筒的视图,图14是示出根据实施例的相机模块的盖的视图。
221.参考图4,根据实施例的光发射单元的壳体110可以包括壳体孔111、基板槽112、传感器孔113和线圈座部件114。
222.壳体孔111可以位于壳体110的中心。第一光学单元、第一透镜筒和驱动单元可以
位于壳体孔111中。
223.基板槽112可以位于壳体110的外表面上。壳体110在平面图中可以具有矩形形状。然而,壳体110不限于此,并且可以形成各种形状。
224.此外,用于与侧基板联接的联接突起可以位于基板槽112中。联接突起可以从壳体110的侧表面向外延伸。此外,可以在侧基板中设置联接孔,并且联接突起可以插入联接孔中,以便侧基板和壳体110可以彼此联接。
225.传感器孔113可以在第一方向(x轴方向)和第二方向(y轴方向)上与基板槽112重叠。位置传感器可以位于传感器孔113中。因此,位置传感器可以容易地电连接到侧基板。此外,位置传感器具有与壳体110的固定联接位置,以精确测量驱动磁体部件的位置。
226.线圈座部件114可以位于壳体110的内表面上。例如,线圈座部件114可以被配置为从壳体110内表面对内延伸的凸台(ledge)。在本说明书中,内侧可以是从壳体朝向第一光学单元的方向,外侧可以是从第一光学单元朝向壳体的方向,该方向与内侧相反。
227.驱动线圈部件可以被安置在线圈座部件114上。驱动座部件114可以具有对应于具有各种结构的驱动线圈部件的形状。例如,线圈驱动部件可以具有闭环类型(如下所述)。因此,线圈座部件114也可以具有与驱动线圈部件的形状相对应的闭环形状。
228.参考图5,光发射单元的第一光学单元120可以插入第一透镜筒130的透镜容纳部件131中。如上所述,第一光学单元120可以由多个透镜组成。此外,第一光学单元120可以包括位于其外表面上的螺纹。第一透镜筒130还可以在内表面上具有对应于第一光学单元120的螺纹的槽。因此,第一光学单元120和第一透镜筒130可以彼此螺纹联接。
229.此外,第一透镜筒130可以包括磁体座槽132以及上述透镜容纳部件131。可以提供多个磁体座槽132。在实施例中,四个磁体座槽132可以位于第一透镜筒130的彼此面对的第一外表面132a和第二外表面132b上,以及彼此面对且位于第一外表面132a与第二外表面132b之间的第三外表面132c和第四外表面132d上。
230.换句话说,磁体座槽132可以位于第一外表面132a至第四外表面132d的每一者上,以便使第一磁体至第四磁体(下文将描述)安置在第一外表面132a至第四外表面132d的磁体座槽132中。可以将粘合构件应用于磁体座槽132。因此,可以改进第一磁体至第四磁体与第一透镜筒130之间的联接力。
231.参考图6,驱动单元可以包括驱动磁体部件140和驱动线圈部件150。驱动磁体部件140可以包括多个磁体。
232.在实施例中,驱动磁体部件140可以包括第一磁体141至第四磁体144。第一磁体141和第二磁体142可以设置成彼此面对。例如,第一磁体141和第二磁体142可以相对于第二方向被对称地设置。
233.第三磁体143和第四磁体144可以设置成彼此面对,并且可以位于第一磁体141与第二磁体142之间。例如,第三磁体143和第四磁体144可以相对于第一方向被对称地设置。
234.第一磁体141至第四磁体144可以位于上述磁体座槽中。
235.如上所述,驱动线圈部件150在平面(xy)上可以具有闭环形状。驱动线圈部件150可以被安置在线圈座部件上。此外,驱动线圈部件150和驱动磁体部件140可以在第一方向或第二方向上至少部分地重叠。
236.此外,驱动线圈部件150可以被设置成围绕驱动磁体部件140。换句话说,驱动磁体
部件140可以位于驱动线圈部件150的闭环上。
237.此外,驱动线圈部件150可以设置成与驱动磁体部件140相隔预定距离。
238.此外,驱动线圈部件150可以包括第一电线w1和第二电线w2,所述第一电线w1和第二电线w2被配置为在其一端电连接到侧基板。第一电线w1和第二电线w2可以设置在与侧基板相对应的位置处,以最小化电阻。因此,可以防止由于电阻而导致的精度降低,并且可以提高功效。
239.第一电线w1和第二电线w2可以分别连接到由线圈组成的驱动线圈部件150的一端和另一端。
240.参考图7至图9,弹性部件160可以包括第一弹性构件161和第二弹性构件162。弹性部件160可以位于第一透镜筒130的上方或下方,并可以联接到壳体110和第一透镜筒130。因此,即使当第一透镜筒130被驱动单元垂直移动时,也可以通过联接到壳体110的弹性部件160对第一透镜筒130的垂直移动施加预加载。因此,当没有电流施加到驱动线圈部件时,通过弹性部件160的恢复力,第一透镜筒130可以出现在壳体110中的相同位置。
241.第一弹性构件161可以位于第一透镜筒130上方。第二弹性构件162可以位于第一透镜筒130下方。
242.第一弹性构件161可以包括第一弹性联接部件p1和第二弹性联接部件p2。第一弹性联接部件p1可以位于第二弹性联接部件p2的外部。此外,第一弹性联接部件p1可以联接到壳体110的突起。此外,第二弹性联接部件p2可以联接到第一透镜筒130。此时,对于上述联接,粘合构件可以应用到第一弹性联接部件p1和第二弹性联接部件p2。例如,粘合构件可以包括阻尼液(damper liquid)。此外,阻尼液可以包括例如环氧树脂等。
243.类似地,第二弹性构件162可以包括第三弹性联接部件p3和第四弹性联接部件p4。第三弹性联接部件p3可以位于第四弹性联接部件p4的外部。
244.此外,第三弹性联接部件p3可以联接到壳体110的突起。此外,第四弹性联接部件p4可以联接至第一透镜筒130。此时,粘合构件可以应用于第三弹性联接部件p3和第四弹性联接部件p4以实现上述联接。
245.此外,具有各种曲率的第一图案部件pt可以位于第一弹性联接部件p1与第二弹性联接部件p2之间。换句话说,第一弹性联接部件p1和第二弹性联接部件p2可以通过其间插入的第一图案部件pt彼此联接。第一图案部件pt可以对称地位于第一方向(x轴方向)和第二方向(y轴方向)上。
246.同样,具有不同曲率的第二图案部件pt’可以位于第三弹性联接部件p3与第四弹性联接部件p4之间。换句话说,第三弹性联接部件p3与第四弹性联接部件p4可以通过其间插入的第二图案部件pt’彼此联接。第二图案部件pt’可以对称地位于第一方向(x轴方向)和第二方向(y轴方向)上。
247.参考图10和图11,侧基板170可以具有一个侧面,以及面对一个侧面并与壳体接触的另一个侧面。
248.侧基板170可以包括第一和第二导电部件ec1和ec2,该第一和第二导电部件ec1和ec2连接到一个侧面上的驱动线圈部件的第一和第二电线。此外,侧基板170可以包括在另一侧面上的联接孔170a。联接孔170a可以联接到如上所述的壳体的联接突起。因此,侧基板170可以联接到壳体的侧面。
249.此外,位置传感器180可以位于侧基板170的另一侧面上。位置传感器180可以被安置在侧基板170的另一侧面上,并被插入传感器孔中。
250.参考图12,基座200可以位于主基板4上,并且可以与主基板4接触。此外,上述第一透镜筒、第一光学单元、第二透镜筒、第二光学单元和壳体可以被安置在基座200上。
251.基座200可以包括设置成彼此间隔开的第一基座部件210和第二基座部件220。光发射单元的部件,例如第一光学单元、第一透镜筒和壳体,可以位于第一基座部件210上。此外,第二基座部件220可以具有安置于其上的第二光学单元和第二透镜筒。
252.第一基座部件210和第二基座部件220可以分别包括基座孔210a和220a。来自光源的光信号可以被输出到物体,从物体反射的光信号(反射光)可以通过基孔210a和220a提供给图像传感器。
253.此外,上述滤光器可以分别位于第一基座部件210和第二基座部件220上。此外,第一基座部件210和第二基座部件220显示为一个本体,但可以分开。此外,第二基座部件220可以被倾斜(如上所述),并且连接到第二基座部件220的滤光器也可以被倾斜,以便可以根据实施例的相机模块执行上述超分辨率技术。
254.参考图13,第二光学单元310可以联接到第二透镜筒320。第二光学单元310可以被插入到位于第二透镜筒320中心的孔中。此外,第二透镜筒320可以通过在外表面上具有螺纹来螺纹联接到基座200的第二基座部件220。
255.第二光学单元310也可以由多个透镜组成。
256.参考图14,除了上述内容外,盖400还可以包括第一盖部件410和第二盖部件420。第一盖部件410可以包括第一盖孔410a,该第一盖孔位于第一基座部件上并与第一光学单元重叠。通过第一光学单元的光信号(输出光)可以通过第一盖孔410a照射到物体。
257.第二盖部件420可以包括第二盖孔420a,该第二盖孔位于第二基座部件上并与第二光学单元重叠。通过第二光学单元的光信号(反射光)可以通过第二盖孔420a照射到图像传感器。
258.图15是描述根据实施例的光发射单元中的第一光学单元和第一透镜模块的运动的视图,图16是描述根据第一光学单元和第一透镜模块的运动的光信号的形式的视图,图17是示出根据第一光学单元和第一透镜模块的运动的光接收单元的图像的示例的视图。
259.参考图15至图17,根据实施例的第一光学单元和第一透镜模块垂直移动,使得光信号(输出光)可以转换为平面光源或点光源。
260.换句话说,输出光可以根据光源与第一透镜模块(或第一光学单元/第二光学单元(在下文中,可以与光学单元互换使用))之间的间隔,以平面光源或点光源的形式或模式(pattern)输出。
261.在实施例中,第一光学单元和第一透镜模块可以通过驱动单元沿光轴方向(z轴方向)移动。此外,如上所述,第一光学单元和第一透镜模块向上移动的移动量可以根据流过驱动线圈部件的电流量进行调整。
262.例如,在根据实施例的相机模块中,第一光学单元和第一透镜模块可以被移动,以便与光源的距离具有最大值(参见图15a)到最小值(参见图15b)。具体而言,上述光源与光学单元(第一光学单元)之间的距离可以是光源孔径的最上表面与光学单元的最下表面之间的距离。此外,当光源孔径的最上表面与光学单元的最下表面之间的距离小于或等于预
定距离(例如,80μm)时,光以点形式被输出。此外,当光源孔径的最上表面与光学单元的最下表面之间的距离大于或等于预定距离(例如530μm)时,光源可以平面形式被输出。然而,本发明不限于上述距离。
263.换句话说,控制单元可以通过控制供给驱动线圈部件的电流量来调整第一透镜模块(或第一光学单元)与光源之间的距离,从而最终控制输出光的形式(平面光源或点光源)。例如,当提供给驱动线圈部件的电流量发生变化(例如,电流值增加/减少)时,控制单元可能会通过致动器改变第一透镜模块的移动量。
264.在实施例中,当光源与第一透镜模块(或第一光学单元)之间的间隔大于或等于一定距离时,可以以如图16a和17a所示的平面光源或平面形式输出光信号(输出光)。换句话说,当光源与第一透镜模块(或第一光学单元)之间的距离介于预设距离(或一定距离)与最大距离之间时,可以以平面光源或平面形式输出光信号(输出光)。这里,最大距离可以是光源与可移动的第一透镜模块之间的距离最大时的距离,也可以是致动器驱动到最大(例如,最大电流)时,第一透镜模块的位置与光源之间的距离。
265.另一方面,当光源与第一透镜模块(或第一光学单元)之间的间隔小于或等于一定距离时,光信号可以以点光源或点形式被输出,如图16b和17b所示。换句话说,当光源与第一透镜模块(或第一光学单元)之间的距离介于预设距离(或一定距离)和最小距离之间时,可以以点光源或点形式输出光信号。这里,最小距离可以是光源与可移动的第一透镜模块(或第一光学单元)之间的间隔最小时的距离,以及当致动器未被驱动时,第一透镜模块的位置(初始位置)与光源之间的距离。然而,下面将描述该位置的各种实施例。
266.此外,在预定距离或更小的范围内,来自光源的光信号(输出光)可以以点形式输出(如上所述),并且可以向物体施加更高的能量。
267.根据本发明实施例的相机模块10的优点在于:相机模块10可以灵活地响应各种应用的要求,因为输出光的光模式可以从平面光源改变为点光源,或者可以根据输出光的分辨率、与物体的距离、能耗程度等来改变点光源的分辨率。
268.图18是描述根据实施例的传感器中产生电信号的过程的视图。
269.参考图18,如上所述,反射光(输入光)ls2的相位可以通过入射光(输出光)ls1入射到物体上,然后反射,再返回的距离来延缓(retarded)。
270.此外,如上所述,可以提供多个参考信号,并且在实施例中,如图18所示,可以提供四个参考信号c1到c4。此外,参考信号c1到c4中每一个可以与光信号具有相同的频率,但可以彼此有90度的相位差。四个参考信号中的一个(例如c1)可以与光信号具有相同的相位。此外,参考信号c1至c4可以应用于传感器,并且传感器可以根据参考信号从反射光ls2产生电信号。在实施例中,传感器可以包括切换元件和被配置为产生电信号的充电元件,并且切换元件可以根据参考信号执行开/关操作。换句话说,传感器可以响应每个参考信号而暴露传感器的有效区域,并在暴露时间(曝光时间)内接收光信号。换句话说,当参考信号打开(正的(positive))时,传感器可以通过从反射光ls2充电来产生电信号。因此,传感器可以产生对应于图18中阴影部分的电信号。
271.此外,此时,充电元件可以包括电容器等,切换元件可以包括各种切换元件,例如场效应晶体管,并且充电元件和切换元件不限于上述类型。
272.此外,在本发明中,传感器是指图像传感器,并且控制单元可以位于相机模块或图
像传感器中。此外,如下文将描述的,控制单元可以输出控制信号(下面将描述照射光信号),用于控制光源提供的入射光的输出。此外,控制单元可以与输出控制信号同步地输出曝光信号。曝光信号可以对应于上述参考信号。此外,参考信号或曝光信号对于入射光的输出和控制信号的传输可能具有预定的延迟(以下参见图28或更高)。然而,为了理论描述,参考信号或曝光信号将在图18至26中以相同的时间点进行描述。
273.此外,在其他实施例中,可以在曝光时间内以多个频率产生光信号。此时,传感器根据多个频率吸收输入光信号。例如,假设光信号在频率f1和f2产生,并且多个参考信号彼此具有90度的相位差。然后,由于入射光信号也具有频率f1和f2,因此可以通过具有频率f1的输入光信号和与之对应的四个参考信号来产生四个电信号。此外,可以通过具有频率f2的输入光信号和与之对应的四个参考信号产生四个电信号。因此,总共可以产生八个电信号。在下文中,将描述以一个频率产生光信号(产生四个电信号)的情况,但如上所述,光信号可以以多个频率产生。
274.图19是描述根据实施例的传感器的视图,图20是根据实施例在传感器中生成一帧的时序图。
275.首先,参考图19,图像传感器is可以如上所述形成具有多个像素的阵列结构。此时,图像传感器is是有源像素传感器(aps),可以是互补金属氧化物半导体(cmos)传感器。此外,图像传感器is也可以是电荷耦合器件(ccd)传感器。图像传感器is可以包括tof传感器,其配置为接收从物体反射的光(例如红外线),并使用时间差或相位差测量距离。
276.例如,在图像传感器is中,多个像素可以在第一方向和第二方向并排布置。例如,多个像素可以是矩阵的形式。此外,在实施例中,多个像素可以包括第一像素和第二像素。第一像素和第二像素可以在第一方向和第二方向上交替设置。换句话说,围绕一个第一像素,可以在第一方向和第二方向上靠近第一像素设置多个第二像素。例如,在图像传感器is中,第一像素和第二像素可以被设置成棋盘式图案。换句话说,如图19所示,在分辨率为320x240的图像传感器is中,76800个像素可以以网格形式布置。
277.此外,第一像素和第二像素可以是被配置为接收具有不同波长段作为峰值波长的光的像素。例如,第一像素可以接收具有红外波段作为峰值波长的光。此外,第二像素可以接收具有红外波段以外波长作为峰值波长的光。此外,第一像素和第二像素中的任意一者都不能接收光。
278.此外,在实施例中,多个像素可以包括设置光接收元件的有效区域和有效区域以外的无效区域。有效区域可以是通过接收光产生预定电信号的区域,无效区域可以是不通过接收光生成电信号或不接收光的区域。换句话说,无效区域可以包括即使当光接收元件位于其中时也可能不会由光产生电信号的情况。
279.此外,第一像素可以包括有效区域,但第二像素可以仅由不存在有效区域的无效区域组成。例如,诸如光电二极管等的光接收元件可以仅位于第一像素中,而不位于第二像素中。此外,例如,图像传感器is可以包括多个行区域,其包括沿行方向交替设置的有效区域和无效区域。此外,在实施例中,图像传感器is可以包括多个列区域,其包括在列方向上交替设置的有效区域和无效区域。
280.此外,多个像素可以形成为各种形状,例如矩形、三角形、多边形和圆形。此外,像素内的有效区域还可以具有各种形状,例如矩形、三角形、多边形和圆形。
281.换句话说,多个像素可以被设置成以规则的间隔彼此间隔开。与像素的大小相比,分离距离可以非常小,并且可以在分离距离中设置电线等。在下文中,在本说明书中,将忽略分离距离来进行描述。
282.此外,在实施例中,每个像素dx(例如,第一像素)可以包括具有第一光电二极管和第一晶体管的第一像素dx-1,以及包括第二光电二极管和第二晶体管的第二像素dx-2。
283.第一像素dx-1以与输出光波形相同的相位接收输入光信号。换句话说,当打开光源时,第一光电二极管被打开以吸收输入光信号。此外,当关闭光源时,第一光电二极管被关闭以停止吸收输入光。第一光电二极管将吸收的输入光信号转换为电流,并将电流传输到第一晶体管。第一晶体管将接收到的电流转换为电信号并输出电信号。
284.第二像素dx-2以与输出光波形相反的相位(例如180度)接收输入光信号。换句话说,当打开光源时,第二光电二极管被关闭以吸收输入光信号。此外,当关闭光源时,第二光电二极管被打开以停止吸收输入光。第二光电二极管将吸收的输入光信号转换为电流,并将电流传输到第二晶体管。第二晶体管将接收到的电流转换为电信号。
285.因此,第一像素dx-1可以称为同相接收单元(in-phase reception unit),第二像素dx-2可以称为异相接收单元(out-phase reception unit)。如上所述,当第一像素dx-1和第二像素dx-2以时间差被激活时,根据与物体的距离,会发生接收光量的差异。例如,当物体正好在相机模块前面时(即距离=0时),光从光源输出然后从物体反射所需的时间为零,因此光源的闪烁周期变成了光的接收周期。因此,只有第一像素dx-1接收光,而第二像素dx-2不接收光。如另一示例,当物体被定位为远离相机模块预定距离时,光从光源输出然后从物体反射,需要时间,因此光源的闪烁周期与光的接收周期不同。因此,第一像素dx-1和第二像素dx-2接收的光量不同。换句话说,可以使用输入到第一像素dx-1和第二像素dx-2的光量的差异来计算物体的距离。换句话说,控制单元使用从图像传感器is接收的电信号计算输出光与输入光之间的相位差,并使用相位差计算物体与相机模块之间的距离。
286.更具体地,在第一积分时间pl1期间,第一参考信号c1可以被提供给第一像素dx-1,第二参考信号c2可以被提供给第二像素dx-2。此外,在第二积分时间pl2期间,第三参考信号c3可以被提供给第一像素dx-1,第四参考信号c4可以被提供给第二像素dx-2。第一积分时间pl1和第二积分时间pl2可以形成一个帧周期,并且在第一积分时间pl1与第二积分时间pl2之间可以存在读出(read out)。此时,读出是其中像素中每个光接收单元中充电的电荷量被放电的部分。此时,第一参考信号c1至第四参考信号c4是用于调整像素中充电元件的充电的信号,并且可以是切换元件中的栅极信号,其可以以与参考图18所描述的相同的方式应用。通过这种方法,图像传感器is可以从多个像素中的每一个输出对应于参考信号的电信号。此外,可以通过参考信号计算入射光与反射光之间的相位差。如上所述,对于光信号,每一个帧周期可以产生四个电信号。因此,控制单元可以使用下面的公式1计算光信号与输入光信号之间的相位差td。
287.【公式1】
[0288][0289]
其中,q1至q4是四个电信号中每个的电荷充电量(以下简称电荷量(electric charge amounts))。q1是指对应于与光信号具有相同相位的参考信号的电信号的电荷量。
q2是指对应于比光信号慢180度相位的参考信号的电信号的电荷量。q3指对应于比光信号慢90度相位的参考信号的电信号的电荷量。q4指对应于比光信号慢270度相位的参考信号的电信号的电荷量。
[0290]
然而,根据图像传感器is中充电元件的数量、切换元件的数量和光接收单元的数量,在一个帧周期内计算光信号与输入光信号之间的相位差td所需的积分时间可能会发生不同的变化。例如,两个充电元件也可以连接到每个光接收单元(即,两个光接收单元共有四个充电元件)。此时,在一个积分时间内可以为每个光接收单元提供两个参考信号。例如,在第一积分时间内,第一参考信号和第二参考信号可以被提供给第一光接收单元,第三参考信号和第四参考信号可以被提供给第二光接收单元。因此,可以产生对应于每个参考信号的电信号,如上所述,控制单元可以使用各个电信号的总电荷量来计算光信号与输入光信号之间的相位差td。
[0291]
此外,在其他实施例中,在一个帧周期中存在四个积分时间,并且对于每个积分时间具有90度相位差的四个参考信号可以被提供给光接收单元。此外,控制单元可以利用每个积分时间产生的电信号的电荷量来计算上述光信号与输入光信号之间的相位差td。
[0292]
此外,参考图20,一个帧周期可以依次包括第一积分时间和第二积分时间。图像传感器is可以在第一积分时间内分别向第一像素dx-1和第二像素dx-2提供第一参考信号c1和第二参考信号c2。此外,图像传感器is可以在第二积分时间内分别向第一像素dx-1和第二像素dx-2提供第三参考信号c3和第四参考信号c4。因此,电荷量q1和q2可以在第一积分时间产生,电荷量q3和q4可以在第二积分时间产生。因此,控制单元可以在一个帧中产生所有电荷量q1到q4,并使用四个产生的电信号的电荷量计算光信号与输入光信号之间的相位差td。
[0293]
此外,控制单元可以利用光信号与输入光信号之间的相位差td计算物体与相机模块之间的距离。此时,控制单元可以利用下面的公式2计算物体与相机模块之间的距离d(见公式2)。
[0294]
【公式2】
[0295][0296]
其中,c表示光速,f表示输出光的频率。
[0297]
根据实施例,可以从相机模块获得tof ir图像和深度图像。因此,根据本发明实施例的相机模块可以被称为tof相机模块或tof相机模块。
[0298]
此外,在一帧中,第一参考信号至第四参考信号也可以应用于相同的积分时间,并且也可以应用在如上所述的一些或每个不同的积分时间。
[0299]
在这方面,更具体地,如图21所示,根据实施例的相机模块可以生成四个相位的原始图像。这里,四个相位可以是0
°
、90
°
、180
°
和270
°
,每个相位的原始图像可以是由每个相位的数字化像素值或模拟像素值组成的图像,并且可以与相位图像、相位ir图像等互换使用。
[0300]
图21是根据其他实施例在传感器中生成深度图像的一个帧周期的时序图,图22是图21中的帧周期内的每个积分时间生成电信号的时序图,图23是图21中的积分时间pl1中的时序图,图24是图21中的积分时间pl2的时序图,图25是图21中的积分时间pl3的时序图,
图26是图21中的积分时间pl4的时序图。
[0301]
参考图21,根据其他实施例,可以存在一个帧周期的四个积分时间和四个读取,其中深度图像可以从传感器中提取。然而,如上所述,根据光接收单元的数量、充电元件的数量和开关的数量,积分时间的数量和读取的数量可能会发生不同的变化。此外,在图21至图26,入射光ls1的占空比将被设置为25%。然而,在本发明中,入射光的占空比不限于此,并且可以不同程度地改变。
[0302]
一个帧周期可以包括依次执行的第一积分时间pl1、第二积分时间pl2、第三积分时间pl3和第四积分时间pl4。此外,可以在各个积分时间之间进行读取。因此,一个帧周期可以包括第一积分时间pl1至第四积分时间pl4以及读取(例如,四个)。对其的描述可以采用与上述内容相同的方式。此外,每个积分时间可以与入射光ls1的周期相同。
[0303]
参考图22,每个像素可以为每个积分时间的不同相位产生电信号。换句话说,可以应用不同的参考信号。具体而言,下面将描述一个像素由第一像素dx-1和第二像素dx-2组成。在第一积分时间pl1中,与入射光ls1具有相同相位的第一参考信号(对应于上述c1)可以应用于第一像素dx-1,相位比第一参考信号慢180度的第二参考信号(对应于上述c2)可以应用于第二像素dx-2。此外,在第二积分时间pl2中,相位比第一参考信号c1慢90度的第三参考信号(对应于上述c3)可以应用于第一像素dx-1,相位比第三参考信号慢180度的第四参考信号(对应于上述c4)可以应用于第二像素dx-2。此外,在第三积分时间pl3中,第二参考信号c2可以应用于第一像素dx-1,第一参考信号c1可以应用于第二像素dx-2。此外,在第四积分时间pl4中,第四参考信号c4可以被应用于第一像素dx-1,且第三参考信号c3可以被应用于第二像素dx-2。
[0304]
因此,在第一积分时间pl1,第一像素dx-1可以产生与上述电荷量q1相对应的电荷量q0
°
,第二像素dx-2可以产生与上述电荷量q2相对应的电量q180
°
。此外,在第二积分时间pl2,第一像素dx-1可以产生与上述电荷量q3相对应的电荷量q90
°
,第二像素dx-2可以产生与上述电荷量q4相对应的电荷量q270
°
。此外,在第三积分时间pl3,第一像素dx-1可以产生电荷量q180
°
,第二像素dx-2可以产生电荷量q0
°
,而在第四积分时间pl4,第一像素dx-1可以产生电荷量q270
°
,第二相素dx-2可以产生电荷量q90
°
。
[0305]
此外,根据本实施例,像素可以在每个积分时间内输出由第一光接收单元和第二光接收单元产生的电信号之间的差。换句话说,像素可以在第一积分时间内输出电荷量q0
°
和电荷量q180
°
之间的差(q0
°‑
q180
°
),并且在第二积分时间内输出电荷量q90
°
和电荷量q270
°
之间的差(q90
°‑
q270
°
)。
[0306]
参考图22至26,多个积分时间p1至p4中的每一个可以由多个次积分时间组成。例如,第一积分时间pl1可以包括多个次积分时间pl11至pl13,第二积分时间pl2可以包括多个次积分时间pl21至pl23,第三积分时间pl3可以包括多个次积分时间pl31至pl33,第四积分时间pl4可以包括多个次积分时间pl41至pl43。在这种情况下,每个次积分时间可以与入射光ls1的周期相同。此外,每个积分时间中在第一像素dx-1和第二像素dx-2中产生的电信号与上面参考图21所描述的内容相同。
[0307]
此时,控制单元可以将通过多个次积分时间获得的电信号的平均值作为一个积分时间的电信号进行处理。因此,可以进一步提高深度电信号的精度。
[0308]
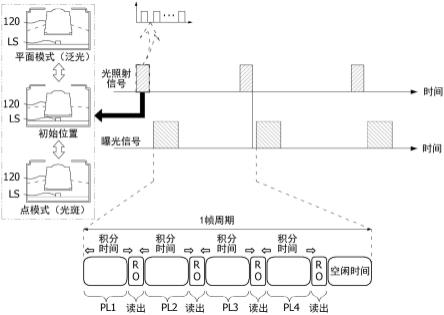
图27a是描述根据实施例的控制单元的驱动的视图。
[0309]
参考图27a,在根据实施例的相机装置中,控制单元可以输出光照射信号,用于控制光源在预定周期(例如,帧周期)内发光。在实施例中,可以通过控制单元的光照射信号周期性地打开或关闭光源。
[0310]
控制单元可以向光源提供光照射信号。因此,光源可以根据光照射信号发射具有预定周期的光。例如,照射光可以对应于上述入射光。此外,光可以在预定的帧周期内被照射。例如,光可以以30fps被照射。因此,根据本实施例的相机模块可以每秒生成30帧。此外,光照射信号可以对应于上述入射光或入射光信号。
[0311]
光照射信号是用于驱动光源的信号,并且可以由如上所述的多个脉冲组成。在实施例中,光照射信号可以是具有多个波长的信号。
[0312]
此外,例如,光照射信号可以由一个帧周期内的多个脉冲组成。换句话说,光照射信号在一个帧周期内具有多个脉冲,并且图像传感器可以根据关于多个脉冲的曝光信号产生用于深度测量的上述电信号。
[0313]
此外,如上所述,一个帧周期中的多个曝光信号可以同时被输出,也可以在不同的积分时间被输出。这可能会根据图像传感器的光接收单元的数量和相位驱动方法而改变。
[0314]
例如,光照射信号在一个帧周期内可以具有四个脉冲。四个脉冲可以通过四个参考信号产生四个电信号。此外,如上所述,可以通过四个电信号生成每一帧的图像。此外,响应于四个电信号,积分时间可以是不同的1、2、4等。在下文中,一个帧周期将被描述为具有一个积分时间。换句话说,四个电信号将被描述为在一个曝光信号周期(积分时间)内产生。
[0315]
控制单元可以位于图像传感器中。换句话说,光照射信号可以从图像传感器移动到光源。通过这种配置,可以容易地执行曝光信号与光照射信号之间的同步或同化,从而最小化由于传输引起的时间误差。此外,可以通过最小化时间误差来提高部件的驱动精度。
[0316]
此外,控制单元可以输出曝光信号以控制图像传感器的曝光。更具体地,曝光信号可以从图像传感器中的图像传感器控制单元(或驱动器)输出。在下文中,将对其进行详细描述。
[0317]
此外,图像传感器中的第一和第二光接收单元可以通过曝光信号将吸收的输入光信号转换为电信号,并输出转换后的信号。在上述间接tof中可以执行该性能。
[0318]
此外,在直接tof中,曝光信号可以是图像传感器接收反射光的信号。换句话说,在由光照射信号输出入射光之后,控制单元可以接收反射光和曝光信号。此时,控制单元可以通过在光照射信号(即输入光)以相同方式(下面描述)被输出之前输出驱动信号(下面描述)将光学单元移动到理想位置。
[0319]
在下文中,将基于间接tof进行说明。
[0320]
曝光信号可以具有上述积分时间和读出,以及空闲时间。空闲时间可以位于帧周期内的积分时间和读出之后。空闲时间可以是图像传感器中的光接收单元的操作不被执行的时间。
[0321]
此外,控制单元可以如上所述放置在图像传感器中。此外,可以基于曝光信号同步光照射信号和驱动信号(下面将描述)。因此,可以基于图像传感器的曝光信号输出光照射信号,从而根据入射光和反射光最小化深度测量的误差。
[0322]
此外,如下文将描述的,控制单元可以将输出的驱动信号输出到驱动单元,用于使光学单元移动。控制单元可以位于图像传感器或相机模块内。此外,控制单元可以位于光接
收单元或光发射单元中。此外,控制单元可以与被配置为输出光照射信号或曝光信号的控制单元分开配置。换句话说,根据本实施例,可以提供多个控制单元,并且可以具有各种位置。在下文中,将对其进行详细描述。
[0323]
此外,根据本实施例,当应用光照射信号时,相机模块的光学单元可以从初始位置移动到提供点形式的光的光斑(spot)或由驱动单元提供平面形式的光的泛光(flood)。或者,光学单元可以被移动到以点形式提供光的光斑,或者可以被移动到由驱动单元提供平面形式的光的泛光。在实施例中,光学单元可以在打开光源之前的预定时间之前从初始位置移动到第一位置(平面形式的光学单元的位置或点形式的光学单元的位置)。在下文中,将描述光学单元的移动。此外,在本说明书中,初始位置是指未应用驱动信号时光学单元的位置。此外,点形式的光可以是通过光学单元之后,在与光源或光学单元(或相机模块)相隔预定距离的物体中提供最小尺寸的光。或者,平面形式的光可以是穿过光学单元之后,在与光源或光学单元(或相机模块)相隔预定距离的物体中提供最大尺寸的光。此外,这可以在除初始位置以外的光学单元的控制范围内应用。
[0324]
图27b是描述根据第一实施例的光学单元的运动的视图。
[0325]
参考图27b,根据第一实施例的光学单元可以在打开光源时移动到第一位置,在关闭光源时移动到初始位置。换句话说,光学单元根据应用的驱动信号位于第一位置,并且可以根据驱动信号通过光学单元以平面形式和点形式中的任意一种形式输出光。在下文中,打开光源的情况是指在预定周期内打开或应用所有多个脉冲或一个或多个脉冲的情况。此外,关闭光源的情况是指在预定周期之后或之前关闭所有多个脉冲的情况。然而,为了便于描述,将基于所有多个脉冲进行描述。
[0326]
根据本实施例,当光学单元位于初始位置时,光学单元可以以平面形式和多点形式中的任意一种形式输出光。此外,当光学单元位于第一位置时,光学单元可以以平面形式和多点形式中的另一种形式输出光。
[0327]
在实施例中,当光学单元位于初始位置时,可以以点形式输出光。此外,当光学单元位于第一位置时,相机模块可以以平面形式输出光。
[0328]
此外,在实施例中,当光学单元位于初始位置或第一位置中的任一位置时,光学单元与光源之间的距离可以等于光学单元的背焦距或背焦距离。
[0329]
在第一实施例中,当光学单元位于初始位置或点形式的位置时,光学单元的背焦距可以等于光学单元与光源之间的距离。
[0330]
此外,在第一实施例中,光学单元(位于初始位置或点模式位置)与光源之间的距离dd1可以小于平面模式的光学单元与光源之间的距离dd2。
[0331]
图27c是描述根据第二实施例的光学单元的运动的视图。
[0332]
参考图27c,根据第二实施例的光学单元,当打开光源时,可以移动到第一位置,当关闭光源时,可以移动到初始位置。
[0333]
根据本实施例,当光学单元位于初始位置时,光学单元可以以平面形式和多点形式中的任意一种形式输出光。此外,当光学单元位于第一位置时,光学单元可以以平面形式和多点形式中的另一种形式输出光。
[0334]
在实施例中,光学单元可以在初始位置以平面形式输出光。此外,当光学单元位于第一位置时,可以以多点形式输出光。
[0335]
此外,如上所述,根据实施例,当光学单元位于相机模块中的初始位置或第一位置中的任意一者时,光学单元与光源之间的距离可以等于光学单元的背焦距或背焦距离。
[0336]
在第二实施例中,当光学单元位于初始位置或平面模式的位置时,光学单元的背焦距可以等于光学单元与光源之间的距离。
[0337]
此外,如上所述,在第二实施例中,点模式的光学单元与光源之间的距离dd1可以小于位于初始位置或平面模式的位置的光学单元与光源之间的距离dd2。
[0338]
图27d是描述根据第三实施例的光学单元的运动的视图。
[0339]
参考图27d,根据第三实施例的光学单元,当打开光源时,可以移动到第一位置,当关闭光源时,可以移动到初始位置。
[0340]
根据本实施例,当光学单元位于第一位置时,光学单元可以以平面形式和多点形式中的任意一种形式输出光。此外,当光学单元位于第一位置,光学单元可以以平面形式和多点形式中的另一种形式输出光。
[0341]
更具体地,当以点形式输出光时,光学单元可以位于1-a位置。此外,当以平面形式输出光时,光学单元可以位于1-b位置。
[0342]
在实施例中,光学单元可以移动到初始位置、1-a位置和1-b位置。此外,光源与1-a位置处的光学单元之间的距离dd1可以大于光源与初始位置处的光学单元之间的距离dd0。此外,光源与1-b位置处的光学单元之间的距离dd2可以大于光源与1-a位置处的光学单元之间的距离dd1。
[0343]
此外,初始位置与1-a位置之间的距离(dd1-dd0)可以小于初始位置与1-b位置之间的距离(dd2-dd0)。
[0344]
因此,在根据本实施例的相机模块中,光学单元可以在一个方向上移动的同时输出点模式或平面模式的光。因此,光学单元的移动可以被容易地控制。此外,当主要使用长距离时,光学单元可以更容易地提供点模式的光而非平面模式的光。因此,可以提高功效。
[0345]
图27e是描述根据第四实施例的光学单元的运动的视图。
[0346]
参考图27e,根据第四实施例的光学单元,当打开光源时,可以移动到第一位置,当关闭光源时,可以移动到初始位置。
[0347]
此外,在实施例中,当光学单元位于第一位置时,光学单元可以以平面形式和多点形式中的任意一种形式输出光。此外,当光学单元位于第一位置,光学单元可以以所述平面形式和所述多点形式中的另一种形式输出光。
[0348]
更具体地,光学单元当以点形式输出光时可以位于1-a位置。此外,光学单元当以平面形式输出光时可以位于1-b位置。因此,光学单元可以移动到初始位置、1-a位置和1-b位置。
[0349]
此外,光源与1-a位置的光学单元之间的距离dd1’可以小于光源与初始位置的光学单元之间的距离dd0’。此外,光源与1-b位置的光学单元之间的距离dd2'可以大于光源与初始位置的光学单元之间的距离dd0'。
[0350]
此外,初始位置与1-a位置之间的距离(dd0'-dd1')可以小于初始位置与1-b位置之间的距离(dd2'-dd0')。
[0351]
因此,在根据本实施例的相机模块中,光学单元可以在上下移动时以点模式或平面模式输出光。因此,可以减少光学单元的移动量。因此,可以提高功效。此外,初始位置与
1-a位置之间的距离以及初始位置与1-b位置之间的距离可以被调整为相同或不同。例如,当初始位置与1-a位置之间的距离以及初始位置与1-b位置之间的距离彼此相同时,可以使光学单元的移动范围最小化。此外,当初始位置与1-a位置之间的距离以及初始位置与1-b位置之间的距离不同时,可以根据主要使用的情况进一步提高功效。例如,当其主要用于远距离物体时,初始位置与1-a位置之间的距离可以小于光学单元中初始位置与1-b位置之间的距离。相反,当其主要用于近距离物体时,初始位置与1-a位置之间的距离可以大于光学单元中初始位置与1-b位置之间的距离。
[0352]
图27f是描述根据第五实施例的光学单元的运动的视图。
[0353]
参考图27f,根据第五实施例的光学单元,当打开光源时,可以移动到第一位置,当关闭光源时,可以移动到初始位置。
[0354]
此外,在实施例中,当光学单元位于第一位置时,光学单元可以以平面形式和多点形式中的任意一种形式输出光。此外,当光学单元位于第一位置,光学单元可以以平面形式和多点形式中的另一种形式输出光。
[0355]
更具体地,光学单元当以点形式输出光时可以位于1-a位置。此外,光学单元当以平面形式输出光时可以位于1-b位置。因此,光学单元可以移动到初始位置、1-a位置和1-b位置。
[0356]
此外,光源与初始位置处的光学单元之间的距离dd0”可以大于光源与1-b位置处的光学单元之间的距离dd2”。此外,光源与1-b位置处的光学单元之间的距离dd2”可以大于光源与1-a位置处的光学单元之间的距离dd1”。
[0357]
此外,初始位置与1-a位置之间的距离(dd0
”‑
dd1”)可以大于1-b位置和1-a位置之间的距离(dd2
”‑
dd1”)。
[0358]
因此,在根据本实施例的相机模块中,光学单元可以在一个方向上(向下)移动的同时以点模式或平面模式输出光。因此,可以容易地控制光学单元的移动。此外,当主要用于近距离时,光学单元可以在平面模式中比在多个点模式中更容易地提供光。因此,可以提高功效。
[0359]
图27g是根据实施例的相机模块的框图。
[0360]
参考图27g,根据实施例的相机模块可以包括控制单元clo、图像传感器is的传感器控制单元isd、光源ls的光控制单元lsd和驱动单元at的驱动控制单元atd。在实施例中,相机模块可以包括其中的控制单元clo。或者,控制单元clo可以是应用处理器。
[0361]
首先,图像传感器is的传感器控制单元isd可以向控制单元clo输出与曝光信号同步的触发信号。此外,传感器控制单元isd可以将与曝光信号对应的光源的光输出信号mode se_out输出到控制单元clo。换句话说,触发信号trigger out和光输出信号mode se_out可以同时被输出,也可以以预定的时间差被输出,因为触发信号trigger out和光输出信号mode se_out均对应于曝光信号。此外,传感器控制单元isd可以位于图像传感器is中。此外,光源ls中的光照射单元可以是,例如,垂直腔面发射激光器(vcsels)。因此,光控制单元lsd显示为与光照射单元相对应的“vcsels驱动器ic”。此外,在驱动单元at中,vcm对应于施加有电流的驱动线圈部件150,因此驱动控制单元atd被称为“vcm驱动器ic”。
[0362]
此外,在实施例中,传感器控制单元isd可以输出信号ld_en,用于打开光源ls的光控制单元lsd。此后,由于光控制单元lsd从控制单元clo接收到光照射信号mode se_in,因
此可以最大限度地提高功效。
[0363]
此外,当从图像传感器is接收到触发信号trigger out和光输出信号mode se_out时,根据本实施例的控制单元isd可以输出光照射信号mode se_in和与其同步的驱动信号。因此,光源ls可以通过光照射信号输出光。此外,光学单元可以通过驱动信号被驱动单元移动。
[0364]
此时,光照射信号和驱动信号可以与曝光信号同步。例如,光源ls可以在根据曝光信号接收光的时间间隔之前根据光照射信号输出光。此外,在光源ls输出光之前,光学单元可以被驱动单元移动。换句话说,可以通过在应用光照射信号之前应用驱动信号来进行时间同步。在下文中,将对其进行详细描述。
[0365]
图28是描述根据第一实施例的控制单元的驱动的视图。
[0366]
参考图28,如上所述,控制单元可以将驱动信号输出到驱动单元,用于光学单元的移动。
[0367]
驱动信号被输出到光学单元,光学单元可以通过从控制单元输出的驱动信号执行垂直运动。此外,通过光学单元的垂直运动从光源照射的光可以转换为要照射到物体的点形式或平面形式。此外,下面将描述根据上述第三实施例的光学单元的移动。
[0368]
驱动信号可以由控制单元和曝光信号同步输出。在实施例中,控制单元可以在一个帧周期内的曝光信号之后输出驱动信号。在下文中,将根据如附图所示的曝光信号的周期来描述一个帧周期。此外,曝光信号可以由多个积分时间组成,但下面将基于一个积分时间进行描述。因此,曝光信号的开始和结束将以可以生成一个帧的多个积分时间或一个积分时间来描述。此外,光照射信号也可以由多个脉冲组成,但下面将用一个脉冲来描述。此外,还将以可以生成一个帧的多个积分时间或一个积分时间来描述光照信号的开始和结束。此外,光照射信号的周期可以与一个帧周期相同。此外,在本说明书中,光照射信号和驱动信号将被描述为从脉冲部分输出。此外,输出或应用可以对应于高区段。此外,高对应于开。此外,结束可以处于低状态。此外,低对应于关。
[0369]
在输出光照射信号之前可以输出驱动信号。在实施例中,驱动信号可以在一帧周期内在曝光信号与光照射信号之间被输出。换句话说,控制单元在一个帧周期内输出曝光信号之后,可以输出驱动信号。控制单元可以基于曝光信号的输出调整光照射信号和驱动信号的输出。
[0370]
此外,即使在输出光照射信号之后,驱动信号也可以保持。此外,驱动信号可以与光照射信号的输出结束相同的方式结束,或者可以在光照射信号的输出结束之后不输出。例如,可以在紧接帧周期之前的帧周期中输出光照射信号之前应用驱动信号。或者,在帧周期内输出驱动信号之后,可以在相同的帧周期中输出光照射信号。此外,在输出光照射信号之后的预定时间或时间差dh之后可以输出曝光信号。在这种配置下,考虑到根据实施例的光学单元移动到相机模块中理想位置所需的时间(例如,稳定时间),光学单元可以在光源照射光线之前移动。
[0371]
此外,在输出光照射信号之前,光学单元可以移动到理想位置,这可以保持,直到在帧周期内光源完全照射光为止。因此,可以以所需模式捕获深度图像。因此,可以更准确地进行深度测量。
[0372]
此外,根据本实施例,驱动信号不能与曝光信号重叠。驱动信号的输出可以在光照
信号的输出端点与曝光信号的输出起点之间结束(下一帧周期)。因此,可以使光学单元移动的能量消耗最小化。换句话说,可以提高相机模块的能量效率。此外,可以通过最小化被配置为移动光学单元的致动器等产生的振荡来提高元件的可靠性。
[0373]
在实施例中,驱动信号可以包括输出光照射信号之前的第一区段pe1,以及从第一区段pe1继续的第二区段pe2。
[0374]
第一区段pe1可以重叠曝光信号的空闲时间。此外,第一区段pe1不得与光照射信号重叠(光照射信号的应用)。因此,可以在一个帧周期内降低用于驱动光学单元的能量消耗。
[0375]
此外,在曝光信号的应用结束之后,可以使用时间差dh应用驱动信号。因此,可以降低由驱动信号造成的功耗。在考虑曝光信号结束之后的预设时间内输出的光照射信号的应用时间时,来设置时间差dh。换句话说,在考虑到以平面形式或点形式发光的最大稳定时间时,时间差dh可以是最大延迟时间差。此外,通过这种配置,可以提高功效。
[0376]
图29是描述用于提供平面形式或点形式的驱动信号的调整的视图。
[0377]
参考图29,在根据实施例的相机模块中,控制单元可以通过调整驱动信号中第一区段pe1的宽度来调整点形式或平面形式的光。
[0378]
在实施例中,驱动信号中的第一区段pe1可以具有第一宽度tw1或第二宽度tw2。此外,第一宽度tw1可以小于第二宽度tw2。换句话说,控制单元可以将驱动信号的总宽度调整为不同。
[0379]
在实施例中,当第一区段pe1具有第一宽度tw时,光学单元的移动量可能小于当第二区段pe2具有第二宽度tw2时的移动量。此外,当光学单元的初始位置位于底部时,驱动信号具有第一宽度tw1,因此可以输出点形式的光。此外,当光学单元的初始位置位于底部时,驱动信号具有第二宽度tw2,因此可以输出平面形式的光。然而,将根据光学单元的初始位置设置为与上述图像传感器相邻的底部的情况来描述调整。光学单元的初始位置设置为顶部的情况可能相反。
[0380]
在实施例中,为了深度图像的精度,光学单元的初始位置可以设置在一点处或其附近,在该点发射能量集中的点形式的光。因此,可以进一步提高光学单元移动的能量效率。
[0381]
此外,在实施例中,当光具有平面形式时,驱动信号可以具有最大宽度。此时,在一个帧周期内,具有最大宽度的第一区段pe1和曝光信号可能具有时间差dh。
[0382]
此外,无论是平面形式还是点形式,第二区段pe2都可以被保持。通过这种配置,可以使在光源照射段中光学单元的移动或振荡最小化,从而提高深度图像的精度。
[0383]
图30是描述用于提供平面形式或点形式的驱动信号的第一示例的视图。
[0384]
参考图30,驱动信号的宽度(例如,脉冲宽度)可以如图29所示改变,并且光可以具有与之相应的点形式或平面形式。在下文中,如上所述,光学单元的初始位置将根据被定位在底部的情况来描述。换句话说,当光学单元与光源之间的距离增加时,光会依次从点形式转换为平面形式。此外,施加电流是指施加到线圈以移动光学单元的电流,电流的大小可以调整为与上述驱动信号宽度的大小相对应。
[0385]
在实施例中,在驱动信号中,平面形式的极性可以与点形式的极性相同。与初始位置对应的驱动信号的电流iini、对应于点形式的驱动信号的电流ispot以及对应于平面形
式的驱动信号的电流iflood可以依次被定位。因此,当驱动信号的宽度增加时,光学单元可以从初始位置移动到提供点形式的位置和提供平面形式的位置。在实施例中,为了深度图像的精度,光学单元的初始位置可以设置在一个点处,在该点处发射能量集中的点形式的光。因此,可以进一步提高光学单元移动的能量效率。
[0386]
此外,当光学单元移动到最大值时,即当施加与平面形式对应的驱动信号的电流iflood时,最大功率pmax1可能被消耗。
[0387]
图31是描述用于提供平面形式或点形式的驱动信号的第二示例的视图。
[0388]
如图29所示,驱动信号的宽度(例如,脉冲宽度)可以改变,并且光可以具有相应的点形式或平面形式。此外,如上所述,将根据光学单元的初始位置被定位在提供点形式的位置与提供平面形式的位置之间情况进行描述。例如,初始位置可以靠近顶部或底部。在附图中,初始位置可以位于底部附近。换句话说,当光学单元与光源之间的距离减小时,光可以转换为点形式,当光学单元与光源之间距离增大时,光源可以转换为平面形式。当距离小于或大于如上所述的预定距离时,会发生点形式和平面形式之间的转换。
[0389]
此外,施加电流是指施加到线圈上以移动光学单元的电流,电流的大小可以调整为与上述驱动信号宽度的大小相对应。
[0390]
在实施例中,在驱动信号中,平面形式的极性和点形式的极性可能不同。例如,在驱动信号中,平面形式的极性和点形式的极性可能相反。
[0391]
因此,与初始位置对应的驱动信号的电流iini可以位于对应于点形式的驱动信号的电流ispot与对应于平面形式的驱动信号的电流iflood之间。因此,可以根据驱动信号的宽度和极性调整光学单元的位置。在实施例中,驱动信号的极性可以决定光学单元的移动方向。
[0392]
例如,光学单元可以从初始位置移动到提供点形式的位置和提供平面形式的位置。此时,初始位置位于提供点形式的位置与提供平面形式的位置之间。
[0393]
此外,当驱动信号的极性为负(-)时,光学单元可以向下移动,而当驱动信号极性为正( )时,光学单元可以向上移动。
[0394]
此外,当光学单元移动到最大值时,即当施加与平面形式对应的驱动信号的电流iflood时,最大功率pmax1可能会被消耗。然而,这是因为光是以如上所述的点形式发射的,初始位置也可以位于光斑与泛光之间。
[0395]
此外,当对应于平面形式的驱动信号的极性和对应于点形式的驱动讯号的极性彼此相反时,当光学单元移动到最大值时(例如,当施加与平面形式对应的驱动信号的电流iflood时),最大功率pmax2可以小于上述最大功率pmax1。换句话说,可以提高功效。
[0396]
在实施例中,为了深度图像的精度,光学单元的初始位置可以设置在一个点处,在该点处发射能量集中的点形式的光。因此,可以进一步提高光学单元移动的能量效率。
[0397]
此外,与参考图31所描述的情况相比,通过上述配置,可以降低电流的最大幅度。例如,与初始位置对应的驱动信号的电流iini可以在与点形式对应的由驱动信号产生的电流ispot与与平面形式对应的由驱动信号产生的电流iflood之间有一个中间值(例如零)。通过这种配置,可以减小应用于驱动光学单元的电流的最大幅度。因此,可以使光学单元移动所消耗的功率最小化。
[0398]
此外,根据本实施例的驱动控制单元的方法可以包括在光源输出光之前将用于光
学单元移动的驱动信号发送到驱动单元,传输用于控制光源的光输出的光照射信号,以及通过图像传感器根据积分时间接收光。这里,可以以相同的方式将上述内容应用于驱动信号和光照射信号以及曝光信号或积分时间。
[0399]
更具体地,控制单元可以传输光照射信号以控制光源的打开/关闭。此外,当光源被光照射信号打开时,控制单元可以将光学单元移动到第一位置,并在光源被关闭时,输出将光学单元移到初始位置的驱动信号。然而,驱动信号可以在光源被光照射信号打开之前被照射。此外,光学单元可以以平面形式或多点形式转换从光源输出的光,并输出转换后的光。
[0400]
此外,在将光学单元移动的驱动信号发送到驱动单元之前,控制单元可以接收来自图像传感器的触发信号trigger out和光输出信号mode se_out。触发信号trigger out和光输出信号mode se_out都对应于曝光信号。因此,由于触发信号trigger out和光输出信号mode se_out基于图像传感器的曝光时间被输出到控制单元,因此可以基于一个操作来执行图像传感器的操作(积分时间)、光源的操作(开/关)和光学单元的移动(驱动单元的操作)。因此,通过使这些操作之间的时间误差最小化来轻松执行这些操作。
[0401]
换句话说,在实施例中,控制单元可以接收触发信号以将驱动信号输出到驱动控制单元,作为响应,驱动控制单元可以根据驱动信号的打开或关闭将光学单元的位置移动到初始位置或第一位置。
[0402]
此外,在实施例中,驱动信号可以在触发信号关闭之后被打开。此外,即使在触发信号从关闭转换为打开之后,驱动信号也可以保持在打开状态。此外,当保持的触发信号从打开变为关闭时,或者在触发信号关闭之后,可以关闭驱动信号(参见图27a或图28)。换句话说,如上所述,在光控制单元响应于触发信号的打开而打开之前,可以通过驱动信号来移动光学单元,并且在光学单元的移动被保持之后,驱动信号响应于触发信号的改变(关闭-》打开)或在改变之后被关闭,这可以对应于光学单元移动的结束。
[0403]
换句话说,可以输出与触发信号的输出同步的信号ld_en,用于打开光源ls的光控制单元lsd。而且,应当理解,可以执行每个控制单元的操作(如上所述)。而且,可以以相同的方式执行根据下面描述的其他实施例的控制单元的驱动。
[0404]
图32是描述根据第二实施例的控制单元的驱动的视图。
[0405]
参考图32,根据第二实施例的控制单元可以如上所述向光源提供光照射信号。因此,光源可以根据光照射信号发射具有预定周期的光。光照射信号可以响应上述入射光或入射光信号。此外,光照射信号是用于驱动光源的信号,并且可以由如上所述的多个脉冲组成。在实施例中,光照射信号可以是具有多个波长的信号。除了下面要描述的内容外,可以以相同的方式将上述内容应用于光照射信号的描述。
[0406]
此外,控制单元可以位于图像传感器中。换句话说,光照射信号可以从图像传感器移动到光源。通过这种配置,可以容易地执行曝光信号与光照射信号之间的同步,从而使由于传输引起的时间误差最小化。此外,可以通过最小化时间误差来提高部件的驱动精度。
[0407]
此外,控制单元可以输出曝光信号以控制图像传感器的曝光。图像传感器中的第一和第二光接收单元可以通过曝光信号将吸收的输入光信号转换为电信号并输出电信号。除了下面要描述的内容外,上述内容也可以以相同的方式应用于曝光信号的描述。
[0408]
此外,控制单元可以将输出的驱动信号输出到驱动单元,用于光学单元的移动。控
制单元可以位于图像传感器中。此外,控制单元可以位于光接收单元或光发射单元中。此外,控制单元可以与被配置为输出光照射信号或曝光信号的控制单元分开配置。换句话说,根据本实施例,可以提供多个控制单元,并且可以具有各种位置。
[0409]
在实施例中,控制单元可以将输出的驱动信号输出到驱动单元,用于光学单元的移动。此时,驱动信号可以至少部分地重叠曝光信号。在实施例中,将通过排除前一帧周期中输出的驱动信号来进行描述。
[0410]
此外,驱动信号可以输出到光学单元,并且光学单元可以通过驱动信号执行垂直运动。通过光学单元的垂直运动从光源照射的光可以转换为要照射到物体的点形式或平面形式。
[0411]
在实施例中,可以在输出光照射信号之前输出驱动信号。在实施例中,驱动信号可以在一帧周期内在曝光信号与光照信号之间被输出。或者,驱动信号的输出可以在一个帧周期内在曝光信号与光照射信号之间开始。换句话说,在一个帧周期内输出曝光信号之后,可以输出驱动信号。
[0412]
此外,即使在输出光照射信号之后,驱动信号也可以被保持。驱动信号可以以与光照射信号相同的方式结束,或者在光照射信号的输出结束之后不输出。在这种配置下,考虑到根据实施例光学单元移动到相机模块中理想位置所需的时间(例如,稳定时间),光学单元可以在光源照射光线之前移动。此外,在输出光照射信号之前,将光学单元移动到理想位置,这可以保持到光源的光照射结束为止。因此,用于维持的信号幅度可以与稳定时间的信号幅度相同或不同。因此,可以以所需模式捕获深度图像。因此,可以更准确地进行深度测量。
[0413]
此外,根据实施例,驱动信号可以部分重叠曝光信号。驱动信号的输出可以在曝光信号的输出起点(下一帧周期)之后结束。就这一点而言,根据本实施例的驱动信号可以包括输出光照射信号之前的第一区段pe1’,以及从第一区段pe1’延续的第二区段pe2’。
[0414]
第一区段pe1’可以与曝光信号的空闲时间重叠。此外,第一区段pe1’可以与光照射信号不重叠(光照射信号的应用)。因此,可以使光学单元移动的能量消耗最小化。换句话说,可以提高相机模块的能量效率。此外,可以通过使被配置为移动光学单元的致动器等产生的振荡最小化来提高元件的可靠性。
[0415]
此外,第二区段pe2’可至少部分地重叠曝光信号。因此,光学单元可以在积分时间内移动到初始位置。因此,可以容易地确保在光照射信号的输出结束之后使光学单元的移动结束的余量(margin)。
[0416]
图33是描述根据第三实施例的控制单元的驱动的视图。
[0417]
根据第三实施例的控制单元可以如上所述向光源提供光照射信号。因此,光源可以根据光照射信号发射具有预定周期的光。光照射信号可以响应上述入射光或入射光信号。此外,光照射信号是用于驱动光源的信号,并且可以由如上所述的多个脉冲组成。在实施例中,光照射信号可以是具有多个波长的信号。除了下面要描述的内容外,可以以相同的方式将上述内容应用于对光照射信号的描述。
[0418]
此外,控制单元可以位于图像传感器中。换句话说,光照射信号可以从图像传感器移动到光源。通过这种配置,可以轻松地同步曝光信号和光照射信号,从而使由于传输引起的时间误差最小化。此外,可以通过最小化时间误差来提高部件的驱动精度。
[0419]
此外,控制单元可以输出曝光信号以控制图像传感器的曝光。图像传感器中的第一和第二光接收单元可以通过曝光信号将吸收的输入光信号转换为电信号并输出电信号。除了下面要描述的内容外,上述内容也可以同样的方式应用于对曝光信号的描述。
[0420]
此外,控制单元可以将输出的驱动信号输出到驱动单元,用于光学单元的移动。控制单元可以位于图像传感器中。此外,控制单元可以位于光接收单元或光发射单元中。此外,控制单元可以与被配置为输出光照射信号或曝光信号的控制单元分开配置。换句话说,根据本实施例,可以提供多个控制单元,并且可以具有各种位置。
[0421]
在实施例中,控制单元可以将输出的驱动信号输出到驱动单元,用于光学单元的移动。此时,驱动信号可以与曝光信号重叠。而且,即使在曝光信号之后,也可以部分输出驱动信号。在实施例中,将通过排除前一帧周期中输出的驱动信号来进行描述。
[0422]
此外,驱动信号可以被输出到光学单元,并且光学单元可以通过驱动信号执行垂直运动。通过光学单元的垂直运动由光源照射的光可以转换为要照射到物体的点形式或平面形式。
[0423]
在实施例中,驱动信号可以在输出光照射信号之前被输出。在实施例中,驱动信号可以在一帧周期内在曝光信号与光照信号之间被输出。或者,驱动信号的输出可以在一个帧周期内在曝光信号与光照射信号之间开始。换句话说,在一个帧周期内输出曝光信号之后,可以输出驱动信号。
[0424]
此外,即使在输出光照射信号之后,驱动信号也可以被保持。驱动信号可以以与光照射信号相同的方式结束,或者在光照射信号的输出结束之后不输出。在这种配置下,考虑到根据实施例光学单元移动到相机模块中理想位置所需的时间(例如,稳定时间),光学单元可以在光源照射光线之前移动。此外,在输出光照射信号之前,将光学单元移动到理想位置,这可以保持到光源的光照射结束为止。因此,用于保持的信号幅度可以与稳定时间的信号幅度相同或不同。因此,可以以所需模式捕获深度图像。因此,可以更准确地进行深度测量。
[0425]
此外,根据实施例,驱动信号可以与曝光信号重叠。驱动信号的输出可以在曝光信号的输出起点(下一帧周期)之后结束,然后是其输出终点。就这一点而言,根据本实施例的驱动信号可以包括输出光照射信号之前的第一区段pe1”和从第一区段pe1”继续的第二区段pe2”。在实施例中,第一区段pe1”可以重叠曝光信号的空闲时间。此外,第一区段pe1”可以与光照射信号不重叠(光照射信号的应用)。因此,可以使光学单元移动的能量消耗最小化。换句话说,可以提高相机模块的能量效率。此外,可以通过使被配置为移动光学单元的致动器等产生的振荡最小化来提高元件的可靠性。
[0426]
此外,第二区段pe2”可以与曝光信号(或曝光信号的输出)重叠。而且,即使在曝光信号的输出结束之后,也可以将第二区段pe2”保持预定时间。因此,可以防止在输出曝光信号时,即在积分时间内,由于光学单元的移动(例如,移动到初始位置)而发生振荡。因此,可以提高深度图像的精度。
[0427]
图34是根据其他实施例的相机模块的立体图,图35是根据其他实施例的相机模块的分解立体图,图36a是沿图34中的线a-a’截取的剖视图,图36b是沿图34中的线b-b’截取的剖视图,图36c是沿图34中的线c-c’截取的剖视图,图36d是沿图34中线d-d’截取的剖视图。
[0428]
tof相机装置可以包括相机装置。tof相机装置可以包括相机模块。
[0429]
参考图34至图36d,相机模块可以包括光发射单元1。光发射单元1可以为光发射模块、光发射单元、光发射组件或光发射设备。上述内容可以以相同的方式应用于对光发射单元1的描述。
[0430]
此外,相机模块20可以包括光接收单元2。光接收单元2可以是光接收模块、光接收单元、光接收组件或光接收设备,并且可以是相机模块的一个部件。光接收单元2可以接收从光发射单元1发射并从物体反射的光,并将接收到的光转换为电信号。除了下面要描述的内容外,上述内容可以以相同的方式应用于对光接收单元2的描述。
[0431]
在实施例中,光接收单元2可以包括壳体1000、透镜模块2000、基板3000、线圈单元4000、支架5000、磁体单元6000、弹性构件7000、光学构件8000、盖9000和图像传感器is。
[0432]
首先,壳体1000可以位于下面描述的盖9000内。壳体1000可以联接到透镜模块2000、基板3000、线圈单元4000和弹性构件7000,(下面将描述)。在下文中,将对其进行详细描述。
[0433]
在实施例中,壳体1000可以包括内部部件1100、外部部件1200和设置在内部部件1100与外部部件1200之间的连接部件1300。下面将对其进行详细描述。
[0434]
透镜模块2000可以通过从物体反射的光。透镜模块2000的光轴和图像传感器is的光轴可以对齐。此外,透镜模块2000可以联接到壳体1000。此外,透镜模块2000可以固定到壳体1000上。透镜模块2000可以由多个光学构件组成,但不限于此。
[0435]
透镜模块2000可以包括透镜容纳部件2100,光学构件位于该透镜容纳部件上,并且透镜盖2200被配置成围绕透镜容纳部件2100。透镜盖2200可以接触壳体1000,并且可以通过音圈马达等上下移动(如下所述)。因此,可以改变通过透镜模块2000的光的焦点。
[0436]
基板3000可以联接到壳体1000。基板3000可以联接到壳体1000侧面上形成的基板突起。此外,基板3000还可以包括端子部件3200。端子部件3200是从基板3000的本体部件3100向下延伸的部分,并且可以电连接到主基板4。
[0437]
线圈单元4000可以包括多个线圈,并且可以位于壳体1000的侧面上。线圈单元4000可以位于在壳体1000侧面形成的每个壳体孔中。线圈单元400可以与基板3000电连接。例如,线圈单元4000可以通过电线等连接到基板3000。此外,由于基板3000联接到壳体1000(如上所述),线圈单元4000也可以被安置在壳体1000侧面形成的壳体孔中,并联接到壳体。在下文中,将对其进行详细描述。
[0438]
支架5000可以容纳在壳体1000中。此外,支架5000可以联接到光学构件8000和磁体单元6000(如下所述)。在实施例中,支架5000可以被倾斜。支架5000可以包括基座5100、侧壁5200和第二突起5300。下面将对其进行详细描述。
[0439]
磁体单元6000可以由多个磁体组成。磁体单元6000可以被安置在支架5000侧面形成的支架槽中。此外,磁体单元6000可以被定位成朝向线圈单元4000。通过这种配置,可能会产生洛伦兹力,磁体单元6000、联接到磁体单元6000的支架5000、以及联接到支架5000的光学构件8000可能会因洛伦兹力而倾斜。在下文中,将对其进行详细描述。
[0440]
弹性构件7000可以设置在壳体1000和支架5000上。弹性构件7000可以位于盖9000与支架5000之间。下面将对其进行详细描述。
[0441]
光学构件8000可以联接至支架5000。光学构件8000可以设置在透镜模块2000与图
像传感器is之间。光学构件8000可以设置在物体与图像传感器is之间的光路上。光学构件8000可以过滤具有预定波长范围的光。光学构件8000可以通过具有特定波长的光。换句话说,光学构件8000可以通过反射或吸收特定波长以外的光来阻挡光。例如,光学构件8000可以通过红外线并阻挡具有红外线以外波长的光。或者,光学构件8000可以通过可见光并阻挡具有可见光以外波长的光。
[0442]
此外,光学构件8000还可以被移动。光学构件8000可以与支架5000整体移动。在实施例中,光学构件8000可以倾斜。光学构件8000可以倾斜以调整光路。当光学构件8000倾斜时,入射到图像传感器is上的光路可能会改变。光学构件8000可以改变入射光的视场(fov)角度或fov的方向。
[0443]
光学构件8000可以是滤光器。例如,光学构件8000可以是红外线带通滤光器。因此,光学构件8000只能通过红外线。或者,光学构件可以是与透镜模块分离的单独聚焦固定透镜或可变聚焦透镜(例如,液体透镜)。
[0444]
此外,在实施例中,光学构件8000可以通过倾斜改变光线进入的路径来实现高分辨率飞行时间(tof)。
[0445]
盖9000可以是支架。盖9000可以包括“盖罐”。盖9000可以被设置成围绕壳体1000。盖9000可以联接到壳体1000。盖9000可以容纳其中的壳体1000。盖9000可以位于相机模块的最外侧。盖9000可以为具有开放的下表面的六面体形状。
[0446]
此外,盖9000可以是非磁性物质。此外,盖9000可以由金属制成。此外,盖9000可以由金属板制成。
[0447]
盖9000可以连接到主基板4的接地部分。因此,盖9000可以接地。此外,盖9000可能会阻止电磁干扰(emi)。此时,盖9000可以称为“emi屏蔽罐”。盖9000作为最终组装的部件,可以保护产品免受外部撞击。盖9000可以由厚度小、强度高的材料制成。
[0448]
图像传感器is可以检测输入光。此外,图像传感器is可以检测输入光,并将检测到的输入光作为电信号输出。在实施例中,图像传感器is可以检测具有与光源400输出的光波长相对应的波长的光。例如,图像传感器is可以检测红外线。或者,图像传感器is可以检测可见光。图像传感器is可以包括被配置为感测光线的各种图像传感器。
[0449]
图像传感器is可以包括像素阵列,该像素阵列被配置为接收通过透镜模块2000的光并将光转换为与光对应的电信号,驱动电路被配置为驱动像素阵列中包括的多个像素,以及读出电路,该读出电路被配置为读取每个像素的模拟像素信号。读出电路可以通过比较模拟像素信号和参考信号,通过模数转换生成数字像素信号(或图像信号)。这里,包括在像素阵列中的每个像素的数字像素信号可以构成图像信号,并且由于图像信号在帧单元中被传输因此可以被定义为图像帧。换句话说,图像传感器可以输出多个图像帧。
[0450]
此外,光接收单元2还可以包括位置传感器4500。位置传感器4500可以用于反馈控制。位置传感器4500可以包括霍尔传感器或霍尔ic。位置传感器4500可以检测磁体单元6000。位置传感器4500可以检测磁体单元6000的磁力。位置传感器4500可以设置在线圈单元4000之间。此外,位置传感器4500可以设置在基板3000的内表面上。然而,本发明不限于此,也可以移除位置传感器4500以降低相机模块的复杂性。
[0451]
位置传感器4500可以包括多个位置传感器。位置传感器4500可以包括两个传感器。位置传感器4500可以包括第一位置传感器4510和第二位置传感器4520。第一位置传感
器4510和第二位传感器4520可以设置成彼此垂直。因此,第一位置传感器4510和第二位置传感器4520可以检测磁体单元6000在水平方向上的x轴和y轴移动。此外,在实施例中,还可以提供被配置为检测磁体单元6000在z轴方向(垂直方向、光轴方向)上的移动的附加传感器。在本说明书中,z轴方向是光轴方向或作为第三方向的垂直方向。此外,x轴方向是垂直于z轴方向的方向,并且是实施例中从光发射部件到光接受部件的方向。此外,y轴方向是垂直于x轴方向和z轴方向的方向。下面将对此进行描述。
[0452]
光接收单元2还可以包括图像合成部件。图像合成部件可以包括图像处理器,其被配置为从图像传感器is接收图像信号,并处理(例如,插值和帧合成)图像信号。具体而言,图像合成部件可以利用并合成多个帧的图像信号(低分辨率)为一个帧的图像信号(高分辨率)。换句话说,图像合成部件可以合成包括在从图像传感器is接收的图像信号中的多个图像帧,并将合成结果生成为合成图像。由图像合成部件生成的合成图像的分辨率可以高于从图像传感器is输出的多个图像帧的分辨率。换句话说,图像合成部件可以通过超分辨率(sr)技术生成高分辨率图像。多个图像帧可以包括通过光学构件8000的移动改变为不同光路而生成的图像帧。图像合成部件可以位于光接收单元2的内部或外部。
[0453]
相机模块20可以包括主基板4(印刷电路板(pcb))。光发射单元1和光接收单元2可以设置在主基板4上。主基板4可以电连接到光发射单元1和光接收单元2。
[0454]
此外,相机模块可以包括连接部件3。连接部件3可以电连接到主基板4。连接部件3可以包括设置有连接器7的延伸基板5,并连接到连接基板6。延伸基板5可以是pcb,但不限于此。
[0455]
相机模块可以包括连接基板6。连接基板6可以连接主基板4和连接部件3的延伸基板5。连接基板6可以具有灵活性。连接基板6可以是柔性印刷电路板(fpcb)。
[0456]
此外,主基板4、连接基板6和延伸基板5可以整体或单独形成。
[0457]
相机模块可以包括加强板8。加强板8可以包括加强件。加强板8可以设置在主基板4的下表面上。加强板8可以由不锈钢制成。
[0458]
相机模块(或光接收单元)可以包括透镜驱动设备。相机模块可以包括一个音圈马达(vcm)。相机模块可以包括透镜驱动马达。相机模块可以包括透镜驱动致动器。如上所述,通过这种配置,根据其他实施例的相机模块可以相对于光学构件8000执行三维倾斜。此外,当光学构件8000倾斜时,通过光学构件8000的输入光的光路可以按照预定的规则反复移动。
[0459]
图37是根据其他实施例的相机模块的光接收单元的部分配置的立体图,图38是根据其他实施例的相机模块的壳体的立体图;图39是根据其他实施例的相机模块的部分配置的立体图。
[0460]
参考图37至图39,在实施例中,盖9000可以包括上板9100和侧板9200。具体而言,盖9000可以包括具有盖孔9110的上板9100,以及从上板9100的外周或边缘向下延伸的侧板9200。
[0461]
壳体1000、支架5000等可以位于上板9100内。此外,侧板9200可以位于壳体1000的侧面上。壳体1000的第一阶梯部分1240可以位于侧板9200的下端。
[0462]
此外,侧板9200的内表面可以联接到壳体1000。粘合构件(未示出)可以设置在侧板9200的内表面与壳体1000之间。因此,侧板9200可以固定在壳体1000上。盖9000的上板
9100可以包括对应于支架5000的支架孔5110的盖孔9110。
[0463]
此外,盖9000可以用于支撑基板3000和线圈单元4000,以免受到洛伦兹力的推动。此外,盖9000可以通过传导来使线圈单元4000产生的热量散发。盖9000的侧板9200可以包括弯曲部分,其中侧板9200的一部分向内弯曲并与基板3000的外表面接触。弯曲部分可以包括一个或多个压入部分、压装部分和凹入部分。在实施例中,作为优化的散热结构,线圈单元4000、基板3000和盖9000通过弯曲部分与基板3000接触的结构连接,因此线圈单元4000中产生的热量可以通过传导散发到外部。
[0464]
盖9000的侧板9200可以包括多个侧板。多个侧板可以包括第一至第四侧板。盖9000的侧板9200可以包括:第一侧板和第二侧板,被设置成彼此面对或相对;以及第三侧板和第四侧板,被配置成在第一侧板与第二侧板之间彼此面对或相对。此外,第一至第四侧板可以分别与下文将描述基板3000的第一部分至第四部分301至304(参见图40)接触。
[0465]
此外,在实施例中,壳体1000可以设置在主基板4上。
[0466]
此外,壳体1000可以容纳其中的支架5000。此外,透镜模块2000可以联接到壳体1000。壳体1000可以联接到透镜模块2000的镜筒上。
[0467]
此外,壳体1000可以是供线圈固定于其中的线圈外壳(coil case,线圈盒)。因此,壳体1000可以联接到线圈单元4000,并且基板3000连接到线圈单元4000。
[0468]
具体而言,壳体1000可以包括联接透镜模块2000的内部部件1100和联接线圈单元4000的外部部件1200。内部部件1100和外部部件1200可以整体或单独形成。
[0469]
内部部件1100可以位于壳体1000内。此外,壳体1000的内部部件1100可以包括一个孔1110。孔1110可以是中空的。孔1110可以沿光轴方向穿过壳体1000。
[0470]
此外,可以在内部部件1100的内周表面上提供螺纹1120。内部部件1100的螺纹1120可以联接到透镜模块2000。
[0471]
在实施例中,螺纹1120可以位于内部部件1100的内周表面的底部。因此,内部部件1100的内周表面的顶部可以朝向透镜模块2000的外周表面,并且与透镜模块2000的外周表面间隔开。
[0472]
此外,壳体1000的内部部件1100可以包括突起1130。突起1130可以向上延伸。突起1130可以防止异物注入位于内部部件1100内的透镜模块2000。
[0473]
外部部件1200可以设置在内部部件1100的外部。外部部件1200和内部部件1100可以形成单独的部件或整体形成。壳体1000的外部部件1200可以包括侧壁。壳体1000的侧壁可以设置在支架5000的外部。此外,线圈单元可以设置在外部部件1200上。
[0474]
此外,壳体1000的侧壁可以包括第一壳体侧壁到第四壳体侧壁。壳体1000可以包括彼此相对设置的第一壳体侧壁和第二壳体侧壁,以及在第一壳体侧壁与第二壳体侧壁之间彼此相对设置的第三壳体侧壁和第四壳体侧壁。
[0475]
此外,壳体1000的外部部件1200可以包括一个壳体孔1210。壳体孔1210的形状与线圈单元4000的形状相对应。壳体孔1210的面积可以大于线圈单元4000。因此,壳体孔1210可以容纳线圈单元4000。换句话说,壳体孔1210可以位于壳体1000的侧壁上。在实施例中,壳体孔1210可以形成在壳体1000的第一壳体侧壁至第四壳体侧壁的每一者中。
[0476]
壳体孔1210包括向下延伸的延伸槽1220。线圈单元4000的一端可以设置在延伸槽1220中。
[0477]
具体而言,壳体1000的侧壁可以包括第一槽和第二槽,其形成为从壳体孔1210的下端斜向凹陷。换句话说,第一槽和第二槽可以形成为从壳体孔1210向相邻壳体1000的侧壁凹陷。通过这种配置,可以很容易地在连接到线圈单元4000的电线与基板之间进行电连接。
[0478]
此外,联接突起1230可以位于壳体1000的外表面(或外部部件1200的外表面)上。壳体1000可以通过联接突起1230联接到基板。联接突起1230可以定位为对应于基板的本体部件310(参见图40)。可以提供多个联接突起1230。
[0479]
此外,壳体1000的外部部件1200可以包括第一阶梯部分1240和第二阶梯部分1260。第一阶梯部分1240和第二阶梯部分1260可以位于壳体1000侧壁的上部和下部。此外,第一阶梯部分1240和第二阶梯部分1260可以具有从壳体1000的侧壁的外表面向外延伸的结构。此外,第一阶梯部分1240和第二阶梯部分1260可以在光轴方向上与基板重叠。
[0480]
第一阶梯部分1240可以设置在基板3000的一部分的下部。在实施例中,第一阶梯部分1240可以位于基板3000的本体部件3100的下部。此外,端子部件3200和第一阶梯部分1240可以在垂直于光轴方向的方向上重叠。
[0481]
第二阶梯部分1260可以位于壳体1000的外表面及其外表面的角上。第二阶梯部分1260可以位于本体部件3100的上部。
[0482]
此外,第一阶梯部分1240和第二阶梯部分1260可以形成与基板3000相对应的形状。此外,基板3000可以通过第一阶梯部分1240和第二阶梯部分1260设置在壳体1000侧壁的外表面上。
[0483]
此外,第一阶梯部分1240可以包括第一阶梯槽1250。第一阶梯槽1250可以形成在第一阶梯部分1240中。异物防止构件可以设置在第一阶梯槽1250中。通过这种配置,可以防止异物从外部注入壳体1000。因此,根据其他实施例,可以提高相机模块的可靠性和准确性。
[0484]
第二阶梯部分1260可以设置为在其末端与基板3000间隔开。
[0485]
壳体1000的外部部件1200可以包括阻尼器突起1270。阻尼器突起1270可以形成在壳体1000的外部部件1200的外表面上。阻尼器突起1270可以插入基板3000的基板孔3110中。阻尼器突起1270可以包括多个突起。
[0486]
壳体1000的外部部件1200可以包括向内突出的阻尼器突起1270,例如,朝向支架5000。阻尼器突起1270可以位于外部部件1200的内表面上。
[0487]
此外,阻尼器突起1270可以在垂直于光轴方向的方向上与弹性构件7000(下文将描述)重叠。此外,阻尼器突起1270可以通过阻尼液联接到弹性构件7000的至少一部分。通过这种配置,可以减少倾斜时产生的振荡,以提高元件的可靠性,并使振荡导致的光学构件的倾斜最小化。
[0488]
壳体1000的外部部件1200可以包括壳体突起1280。壳体突起1280可以被插入第二联接部件7200的孔中。因此,壳体突起1280可以联接到第二联接部件7200。
[0489]
壳体1000的外部部件1200可以包括壳体导向部件1290。壳体导向部件1290可以位于壳体1000的角处。盖9000可以安置在壳体导向部件1290上。换句话说,盖9000和侧壁5200的最上面部分(例如,侧壁5200的最上面表面)可以通过壳体导向部件1290彼此间隔开。
[0490]
壳体突起1280可以设置在壳体导向部件1290的内部。换句话说,壳体导向部件
1290可以设置于壳体突起1280的外部。此外,壳体导向部件1290可以设置在弹性构件的外部(下文将描述)。
[0491]
壳体突起1280的底面1280a可以位于壳体导向部件1290的底面的1290a之下。换句话说,壳体突起1280的底面1280a和壳体导向部件1290的底面1290a可以形成阶梯部分。
[0492]
此外,壳体突起1290的上表面可以位于壳体导向部件1290的上表面之下。换句话说,壳体导向部件1290可以设置成与支架的第一突起间隔开,以提供一个使第一突起可以容易地在壳体1000中倾斜的空间。
[0493]
引导部件gp可以设置在弹性构件的外部。此外,引导部件gp可以沿光轴方向或第三方向从壳体1000伸出。
[0494]
引导部件gp可以位于壳体1000的每个角处。在实施例中,引导部件gp可以设置在彼此面对的角处。此外,引导部件gp可以位于彼此面对的壳体导向部件1290之间。例如,引导部件gp和壳体导向部件1290可以设置在不同的对角线方向上。通过这种配置,弹性构件可以通过联接到壳体和支架来使由于倾斜、撞击等引起的变形最小化。
[0495]
引导部件gp可以形成为沿光轴方向从壳体突起1280的底面1280a突出。例如,引导部件gp可以位于壳体突起1280的底面1280a与壳体导向部件1290的底面1290a之间。此外,引导部件gp可以设置在弹性构件和壳体突起1280的外部。
[0496]
此外,引导部件gp可以包括与弹性构件的第二联接部件的外周的至少一部分相对应的形状。在实施例中,第二联接部件可以在第一方向(x轴方向)和第二方向(y轴方向)延伸。相应地,引导部件gp具有与第二联接部件在第一方向延伸的部分相对应的在第一方向上延伸的侧面ge2,以及与第二联接部件在第二方向延伸的部分相对应的在第二方向上延伸的侧面ge1。换句话说,引导部件gp的内表面可以对应于第二联接部件的外表面。具体而言,引导部件gp的内表面可以对应于所面对的第二联接部件的外周或外表面。换句话说,引导部件gp的内表面可以沿着相邻的第二联接部件的边缘形成。
[0497]
通过这种结构,弹性构件的位置移动受到壳体1000的引导部件gp的限制,变形等可能被阻止。也就是说,壳体1000的引导部件gp可以防止弹性构件的变形,并通过固定位置可靠地保持与弹性构件连接的支架等的精确移动。
[0498]
壳体1000可以包括连接部件1300。连接部件1300可以连接内部部件1100和外部部件1200。连接部件1300的至少一部分可以在光轴方向上与支架5000重叠。连接部件1300可以设置在支架5000的至少一部分上。
[0499]
此外,壳体1000可以通过上述集成结构减小尺寸并减少部件数量。此外,壳体1000可以由非磁性材料制成。
[0500]
此外,壳体1000可以包括与支架5000的第一角部分对应的第一角、与支架5000的第二角部分对应的第二角、与支架5000的第三角部分对应的第三角、以及与支架5000的第四角部分对应的第四角,在下文中,将对此进行描述。
[0501]
图40是根据其他实施例的相机模块的基板和线圈的立体图,图41是显示根据各种其他实施例的相机模块的线圈与基板之间联接的视图。
[0502]
参考图40和图41,基板3000可以如上所述位于壳体侧壁的外表面上。此外,基板3000可以设置在盖的侧板与壳体的侧壁之间。基板3000的一部分可以位于壳体的第一阶梯部分与第二阶梯部分之间。基板3000可以设置成围绕壳体的四个侧壁的外表面。
[0503]
此外,基板3000可以与线圈单元4000电连接。线圈单元4000可以设置在基板3000的内表面上。此外,基板3000可以与主基板电连接,以向线圈单元4000提供信号。基板3000可以固定在壳体1000上,该壳体1000是线圈外壳,使线圈单元4000稳定地固定在其上。被配置为感测磁体单元6000的位置的位置传感器4500也可以联接到基板3000。
[0504]
此外,基板3000可以包括fpcb。此外,位置传感器4500和线圈单元4000可以表面安装到基板3000上。在实施例中,由于位置传感器4500联接到基板3000,因此可能是一种不需要单独的部件来使位置传感器4500导电的结构。
[0505]
此外,在实施例中,基板3000被设置在壳体1000的外部,以便基板3000的端子部件3200和主基板4可以焊接,从而可以使连接所需的空间最小化。
[0506]
首先,基板3000可以包括第一部分3010到第四部分3040。基板3000可以包括设置在壳体1000的第一壳体侧壁上的第一部分3010、设置在壳体1000的第二壳体侧壁上的第二部分3020、设置在壳体1000的第三壳体侧壁上的第三部分3030、以及设置在壳体1000的第四壳体侧壁上的第四部分3040。
[0507]
第四部分3040可以连接第一部分3010和第二部分3020,第二部分2020可以连接第三部分3030和第四部分3040。
[0508]
此外,第一部分3010和第三部分3030可以彼此间隔开。第一部分3010的端部和第三部分3030的端部可以位于形成为从壳体1000的第一壳体侧壁和第三壳体侧壁相交的角突出的座部上。
[0509]
此外,第一部分3010至第四部分3040在第三方向上的长度可以在相互接触的部分处减小。此外,接触部分的内表面可以具有曲率。因此,基板3000可以容易地联接到壳体1000的外表面,并且基板3000弯曲的区域中的应力可以减小。
[0510]
更具体地,基板3000可以包括本体部件3100。线圈单元4000可以被安置在本体部件3100上,本体部件3100可以联接到线圈单元4000。此外,位置传感器4500可以联接到本体部件3100。
[0511]
本体部件3100可以设置在壳体1000的外表面上。基板3000的本体部件3100可以包括基板孔3110。壳体1000的联接突起1230可以穿过基板孔3110。因此,基板3000和壳体1000可以通过联接突起1230和基板孔3110彼此联接。
[0512]
此外,基板3000可以包括端子部件3200。端子部件3200可以从本体部件3100向下延伸,并且包括多个端子。换句话说,端子部件3200可以从本体部件3100延伸至其下的主基板。此外,端子部件3200可以通过焊接联接到主基板。由于端子部件3200位于基板3000的下部,因此端子部件3200可以位于主基板与本体部件3100之间。通过这种配置,基板3000和端子部件3200可以很容易地电连接。例如,线圈单元4000和基板3000可以很容易地电连接。此外,可以通过最小化电连接空间来确保组装的简易性。
[0513]
此外,端子部件3200可以形成为对应于第一阶梯部分1240的形状。在实施例中,端子部件3200可以位于多个第一阶梯部分1240之间。
[0514]
基板3000可以包括延伸部3300。延伸部3300可以从本体部件3100向上延伸。延伸部3300可以位于基板3000的上端。换句话说,延伸部3300可以从本体部件3100延伸至盖的上板。
[0515]
延伸部3300可以形成与第二阶梯部分1260的形状相对应的形状。延伸部3300可以
位于多个第二阶梯部分1260之间。
[0516]
此外,线圈单元4000可以位于基板3000上并联接到基板3000。线圈单元4000可以通过粘合构件等联接到基板300。线圈单元4000可以联接到基板3000的内表面。此外,线圈单元4000可以电连接到基板3000。此外,线圈单元4000可以位于壳体1000侧壁的壳体孔中。
[0517]
此外,线圈单元4000可以设置为面向磁体单元(下文将描述)。换句话说,线圈单元4000可以被设置为面对磁体单元。此外,线圈单元4000可以与磁体单元发生电磁相互作用。在实施例中,当向线圈单元4000提供电流以在线圈单元4000周围形成电磁场时,磁体单元可以通过线圈单元4000与磁体单元之间的电磁相互作用相对于线圈单元4000移动。线圈单元4000和磁体单元6000可以设置在彼此相对的位置。
[0518]
此外,线圈单元4000可以包括用于供电的一对端部(引出电线)。此时,第一端4010可以被抽出到线圈单元4000的左侧和下方,第二端4020可以被抽出到线圈单元4000的右侧和下方。线圈单元4000可以包括联接至基板3000的第一端4010和第二端4020。此外,当第一端401和第二端4020仅向上或向下延伸时,线圈的两端集中在中心,因此影响集中在线圈单元4000的中心区域,使得线圈单元容易变形或开裂,并且也很难制造该线圈单元,但根据本实施例,这个问题可以解决。
[0519]
如图41a所示,第一端4010和第二端4020可以联接至基板3000的端子3120。在实施例中,第一端4010和第二端4020可以通过焊接或银环氧树脂联接至基板3000的端子3120。因此,线圈单元4000可以联接到基板3000。
[0520]
同时,如图41b所示,作为修改示例,第一端4010和第二端4020通过单独的联接构件3050联接到基板3000的端子3120。联接构件3050可以是线圈支撑件。线圈单元4000可以通过应用联接构件3050而被表面安装到基板3000上。在这种情况下,优点在于:通过手动焊接布置的可操作性和操作时间的缩短来增加装配的便利性,并且优点在于:与手动焊接相比,由于装配而导致的线圈单元4000的位置扭曲公差减小。此外,可以防止线圈单元4000与磁体单元之间的中心扭曲。
[0521]
第一端4010和第二端4020可以设置在壳体1000的延伸槽1220中。此时,连接到第一端4010和第二端4020和/或上述联接构件3050的导电材料也可以设置在壳体1000的延伸槽1220中。
[0522]
线圈单元4000可以包括多个线圈。线圈单元4000可以包括四个线圈。线圈单元4000可以包括第一线圈4100至第四线圈4400。电流可以施加到第一线圈4100至第四线圈4400的每一者上。第一线圈4100至第四线圈4400可以被电分离。或者,第一线圈4100至第四线圈4400的电流方向可以与流过彼此面对的线圈的电流方向相反。例如,第一线圈4100和第三线圈4300可以形成彼此平行的结构,第二线圈4200和第四线圈4400可以形成彼此平行的结构。
[0523]
此外,第一线圈4100至第四线圈4400是彼此面对的线圈,可以向其施加具有不同方向的电流。因此,可以对光学构件的对角倾斜或水平倾斜进行控制。
[0524]
此外,电流可以施加于第一线圈4100、第二线圈4200、第三线圈4300和第四线圈4400中彼此面对的两个线圈。因此,如下文将描述的,可执行光学构件在水平方向上的倾斜控制。在下文中,将对其进行详细描述。
[0525]
具体而言,线圈单元4000可以包括面对第一磁体6010的第一线圈4100(参见图
42)、面对第二磁体6020的第二线圈4200(参见图42)、面对第三磁体6030的第三线圈4300(参见图42)、以及面对第四磁体6040的第四线圈4400(参见图42)。
[0526]
此外,第一线圈4100可以设置在壳体的第一壳体侧壁上。此外,第二线圈4200可以设置在壳体的第二壳体侧壁上。第三线圈4300可以设置在壳体的第三壳体侧壁上。此外,第四线圈4400可以设置在壳体的第四壳体侧壁上。
[0527]
此外,在实施例中,四个线圈可以由两个通道控制。第一线圈4100和第二线圈4200可以电连接。然而,第一线圈4100与第一磁体6010之间产生的洛伦兹力的方向和第二线圈4200与第二磁体6020之间产生的洛伦兹力方向可以相反。例如,第一线圈4100和第二线圈4200可以设置成使电流沿相反方向流动。在实施例中,第一线圈4100和第二线圈4200可以设置成沿相反方向缠绕。或者,第一线圈4100和第二线圈4200可以设置成沿同一方向缠绕,第一磁体6010的极性设置和第二磁体6020的极性设置可以在不同方向上。同时,第一线圈4100和第二线圈4200可以被电分离,也可以由控制单元整体控制。
[0528]
此外,第三线圈4300和第四线圈4400可以电连接。然而,第三线圈4300与第三磁体6030之间产生的洛伦兹力的方向和第四线圈4400与第四磁体6040之间产生的洛伦兹力方向可以相反。第三线圈4300和第四线圈4400可以设置成使电流沿相反方向流动。例如,第三线圈4300和第四线圈4400可以设置成沿相反方向缠绕。或者,第三线圈4300和第四线圈4400可以设置成沿同一方向缠绕,第三磁体6030的极性设置和第四磁体6040的极性设置可以在不同方向上。同时,第三线圈4300和第四线圈4400可以被电分离,也可以由控制单元整体控制。
[0529]
图42是显示根据其他实施例中的相机模块的支架、磁体和光学构件的分解立体图,图43是显示根据其他实施例中的相机模块的支架、磁体和光学构件的分解立体图,图44是图43中另一视角的立体图,而图45是根据其他实施例的支架、磁体和光学构件的的俯视图,图46是描述实施例中磁体与线圈之间的洛伦兹力的视图,图47是描述实施例中光学构件的对角倾斜控制的视图。
[0530]
参考图42至图47,支架5000可以联接到磁体单元6000和光学构件8000。
[0531]
首先,支架5000可以包括如上所述的支架孔5110。此外,透镜模块可以位于支架孔5110中。向外延伸的槽部分5110a可以被添加到支架孔5110中。当通过槽部分5110a组装时,可以最小化装配公差。
[0532]
此外,支架5000可以包括侧壁槽5220,并且磁体单元6000可以设置在侧壁槽5220中。此外,光学构件8000可以设置在支架5000下方。支架5000可以与光学构件8000整体移动。例如,当支架5000倾斜时,联接到支架5000的光学构件8000也可以倾斜。此外,当支架5000倾斜时,联接到支架5000的磁体单元6000也可以倾斜。支架5000可以是组装光学构件8000和磁体单元6000的壳体。
[0533]
支架5000可以使用非磁性材料,以将磁力对磁体单元6000的影响降至最低。支架5000可以在壳体1000中与壳体1000间隔开。此外,支架5000可以连接到弹性构件7000。支架5000可以通过在第一对角线方向上与弹性构件7000和光学构件8000联接而倾斜。由于支架5000是被实际驱动的部分,因此重量(尺寸)需要被最小化。
[0534]
支架5000可以包括第一侧面、与第一侧面相对设置的第二侧面、以及在第一侧面与第二侧面之间彼此相对设置的第三和第四侧面。支架5000可以包括第一侧面与第三侧面
之间的第一角部分、第二侧面与第三侧面之间的第二角部分、在第二侧面与第四侧面之间的第三角部分、以及在第四侧面与第一侧面之间的第四角部分。对角线方向可以是从第一角部分朝向第三角部分的方向,或者从第三角部分朝向第一角部分的方向。此外,对角线方向可以是从第二角部分朝向第四角部分的方向,或者从第四角部分朝向第二角部分的方向。
[0535]
支架5000可以包括基座5100、侧壁5200和第二突起5300。
[0536]
基座5100可以位于壳体中。光学构件8000可以位于基座5100下方。在实施例中,基座5100可以包括形成在下表面中的基座槽5120。光学构件8000可以设置在基座槽5120中。基座槽5120可以形成与光学构件8000相对应的形状。光学构件8000的至少一部分可以容纳在基座槽5120中。此外,基座槽5120中的光学构件8000可以通过粘合构件联接到基座5100。
[0537]
为了通过粘合构件提高基座5100与光学构件8000之间的联接力,联接槽5120a至5120d可以位于基座5100的下部的角处。
[0538]
在实施例中,基座槽5120可以包括第一联接槽5120a、第二联接槽5120b、第三联接槽5120c、和第四联接槽5120d。第一联接槽5120a可以位于第一边缘表面m1与第四边缘表面m4之间。此外,第二联接槽5120b可以位于第二边缘表面m2与第三边缘表面m3之间。此外,第三联接槽5120c可以位于第二边缘表面m2与第四边缘表面m4之间。此外,第四联接槽5120d可以位于第一边缘表面m1与第三边缘表面m3之间。第一边缘表面m1至第四边缘表面m4可以是由基座槽5120形成的基座5100的每个侧面。
[0539]
粘合构件可以注入到第一联接槽5120a、第二联接槽5120b、第三联接槽5120c、和第四联接槽5120d中。在实施例中,在光学构件8000被安置在基座槽5120中之后,粘合构件可以注入到第一联接槽5120a、第二联接槽5120b、第三联接槽5120c、和第四联接槽5120d中。此时,粘合构件可以通过毛细管现象扩展到基座槽5120的底面。换句话说,粘合构件可以位于光学构件8000的一个表面与基座槽5120的底面之间。
[0540]
此外,光学构件8000可以设置为在第三方向或第一和第二方向上与基座槽5120间隔开的第一分离距离。第一分离距离可以是20μm到100μm。存在的问题是,当分离距离小于20μm时,光学构件与支架之间的联接力可能会减小,当分离距离大于100μm时,很难通过粘合构件轻易实现毛细管现象,支架的尺寸会增大。
[0541]
此外,基座5100可以包括基座孔,并且基座孔可以是中空的。基座孔可以形成为沿光轴方向穿过基座5100。
[0542]
侧壁5200可以从基座5100向上延伸。侧壁5200可以位于基座5100的上表面,并可以沿基座5100的边缘设置。磁体单元6000可以固定在侧壁5200。
[0543]
侧壁5200可以包括第一突起5210。第一突起5210可以位于侧壁5200的上部。第一突出5210可以联接到弹性构件。更具体地,第一突起5210可以联接到第一联接部件7100。此外,第一突起5210和壳体可以通过弹性构件彼此联接。
[0544]
侧壁5200或第一突起5210可以包括突起5210a和导向突起5210b。突起5210a可以位于第一突起5210的上表面上,并且可以向上突出。突起5210a可以联接到第一联接部件7100。突起5210a可以插入第一联接部件7100的孔中。在实施例中,突起5210a可以定位为对应于第一突起5210。第一突起5210可以在对角线方向上向上突出。此外,与此配置相对应,突起5210a可以包括第一突起5210a-1和第二突起5210a-2。此时,第一突起5210a-1和第二
突起5210a-2可以在对角线方向上设置。例如,第一突起5210a-1和第二突起520a-2可以设置在彼此面对的角部处,并且可以在光轴方向上被对称地设置。
[0545]
导向突起5210b可以位于突起5210a的外部。在实施例中,导向突起5210b设置在第一突起5210上,因此可以沿对角线方向被定位。此外,沿对角线方向设置的突起5210a可以位于沿对角线方向上设置的导向突起5210b之间。因此,下面将描述的弹性构件7000在与突起5210a联接时可以由导向突起5210b引导。导向突起5210b可以引导弹性构件7000被安置在支架5000的第一突起5210上,即使由于倾斜等原因发生撞击时也能防止弹性构件7000变形。
[0546]
导向突起5210b的厚度与弹性构件7000的厚度之比可以为1:1至1:2。问题在于:当厚度之比小于1:1时,弹性构件因撞击而发生变形的范围收到限制,当厚度比大于1:2时,光学构件倾斜的范围受到限制发生分离。这里,厚度是指在第三方向的长度。
[0547]
导向突起5210b可以包括与设置在弹性构件7000的角部的第一联接部件7100的外周的至少一部分相对应的形状。
[0548]
导向突起5210b可以包括第一导向突起5210b-1和第二导向突起5210b-2。第一导向突起5210b-1与第二导向突起5210b-2可以设置成彼此面对。例如,第一导向突起5210b-1和第二导向突起5210b-2可以具有对应于第一联接部件外周的至少一部分的内表面。因此,第一导向突起5210b-1和第二导向突起5210b-2的内表面可以被定位为对应于第一联接部件的外表面。在实施例中,第一导向突起5210b-1和第二导向突起5210b-2的内表面可以被定位为面对第一联接部件的外表面。
[0549]
例如,第一联接部件可以具有沿第一方向或第二方向延伸的外表面。对应于第一联接部件的外表面,导向突起5210b可以具有与第一联接部件外表面对应的在第一方向或第二方向上延伸的内表面。此时,第一导向突起5210b-1和第二导向突起5210b-2可以包括沿第一方向延伸的内表面或沿第二方向延伸的内部表面中的至少一个。此外,第一导向突起5210b-1和第二导向突起5210b-2可以位于弹性构件的外部。通过这种配置,导向突起5210b可以保持弹性构件与突起5210a之间的联接力,并且容易防止弹性构件的移动变形。
[0550]
侧壁5200可以包括侧壁槽5220。侧壁槽5220可以位于侧壁5200的外表面上。侧壁槽5220可以被定位为与壳体的第一壳体侧壁至第四壳体侧壁的壳体槽相对应。磁体单元6000可以被安置在侧壁槽5220中。侧壁槽5220可以是凹槽。
[0551]
换句话说,侧壁槽5220可以支撑磁体单元6000。磁体单元6000可以通过粘合构件粘接到侧壁槽5220。因此,侧壁槽5220可以固定磁体单元6000。
[0552]
此外,粘合剂槽5230可以设置在侧壁5200的上端和/或下端。此外,粘合构件可以设置在粘合剂槽5230中。在实施例中,磁体单元6000可以被安置在侧壁槽5220中,粘合件可以通过粘合剂槽5230被注入,以固定在支架5000与磁体单元6000之间。粘合构件可以沿着粘合剂槽5230通过毛细管现象被注入到磁体单元6000与侧壁槽5220之间。因此,粘合构件可以提高壳体与基板之间的联接力。在这种情况下,磁体单元6000和侧壁槽5220可以具有第二分离距离d11。第二分离距离d11可以为20μm至100μm。问题在于:当第二分离距离小于20μm时,支架与磁体之间的联接力可能会减小,当第二分离距离大于100μm时,很难通过粘合构件轻易地执行毛细管现象,支架的尺寸会增大。
[0553]
此外,粘合构件可以通过紫外线(uv)固化、热固化等方式将磁体单元6000固定到
侧壁槽5220上。
[0554]
此外,相机模块的每个部件中的阶梯结构或孔以及支架5000作为对齐标记有助于部件之间的联接,并最终通过最小化部件体积来使相机模块的重量最小化。
[0555]
在实施例中,组装槽5200k可以位于侧壁5200的上表面。当壳体1000和支架5000联接时,可以通过组装槽5200k轻松识别联接位置。因此,容易进行组装。
[0556]
第二突起5300可以从基座5100向下突出。在本说明书中,向上或顶部可指光轴方向或第三方向上的一个方向,向下或底部可指与光轴方向或第三方向上的一个方向相反的方向。相应地,上部可指光轴方向或第三方向上的一个方向上的区域,而下部可指与光轴方向或者第三方向上的一个方向相反方向上的区域。
[0557]
光轴方向或第二突起5300可以位于基座5100的角部。当光学构件8000和支架5000沿对角线方向倾斜时,第二突起5300可以限制倾斜范围。此外,可以防止第二突起5300在倾斜时直接传输到光学构件8000、磁体单元6000等。通过这种配置,第二突起5300可以提高相机模块的可靠性。
[0558]
磁体单元6000可以设置在支架5000中。磁体单元6000可以设置在支架5000的侧壁5200上。磁体单元6000可以设置在支架5000的外周表面上。磁体单元6000可以从支架5000的外表面突出。磁体单元6000可以设置为面对上述壳体孔中的线圈单元。此外,磁体单元6000可以与线圈单元4000发生电磁相互作用。
[0559]
此外,磁体单元6000可以是具有平板形状的平面磁体。本发明不限于此,磁体单元6000可以设置在侧壁5200之间的角部处。此时,磁体单元6000可以是具有六面体形状的角部磁体,其中内侧面比外侧面宽。
[0560]
磁体单元6000可以包括多个磁体。磁体单元6000可以包括四个磁体。磁体单元6000可以包括第一磁体6010至第四磁体6040。磁体单元6000可以包括第一磁体6010、与第一磁体6010相对设置的第二磁体6020、第三磁体6030、以及与第三磁体6030相对设置的第四磁体6040。
[0561]
此外,第一磁体6010可以设置在支架5000的第一侧面上,第二磁体6020可以设置在支架5000的第二侧面上,第三磁体6030可以设置在支架5000的第三侧面上,第四磁体6040可以设置在支架5000的第四侧面上。
[0562]
在实施例中,光学构件8000(或支架5000)可能因作用于电流流过的磁体单元6000和线圈单元4000上的洛伦兹力而倾斜。为了产生洛伦兹力,致动器可以大致分为磁体单元和线圈单元。当产生洛伦兹力时,实际操作的部分可以是磁体单元6000。然而,作为修改示例,线圈单元4000可以被洛伦兹力移动。为了在垂直方向上驱动磁体单元600,磁体单元6000可以被磁化为两极,如图46b所示。换句话说,磁体单元6000可以是具有两极的两个磁体堆叠的形式。
[0563]
此外,如图46c所示,产生洛伦兹力的电流可以沿一个方向流过线圈单元4000(图46c中的a)。此外,电流可以向前流过线圈单元4000。同时,电流可以在与一个方向a相反的方向上流过线圈单元4000。换句话说,电流可以以相反的方向流经线圈单元4000。此外,驱动方向可以根据洛伦兹力向上作用(图47a中的c),通过在磁体单元6000的上部的外部区域设置n极(s极在内部区域),在其下部的外部区域设置s极(n极在内部区域),并允许电流沿一个方向流动。
[0564]
根据上述内容,通过向第一线圈4100至第四线圈4400之间的两个相邻线圈施加正向电流,并向其他两个线圈施加反向电流,可以将光学构件8000设置为沿光学构件8000的对角线方向倾斜。在实施例中,通过控制施加到第一线圈4100和第三线圈4300的电流,光学构件8000可以沿对角线方向倾斜。通过向第一线圈4100至第四线圈4400之间的两个相邻线圈施加电流,可以将光学构件8000设置为沿光学构件8000的对角线方向倾斜。光学构件8000可以包括第一边缘,该第一边缘设置位于与支架5000的第一角部分相对应的位置。此时,光学构件8000的第一边缘可以由第一线圈4100和第三线圈4300沿光轴的向上方向倾斜。光学构件8000可以包括设置在与支架5000的第三角部分相对应的位置处的第三边缘。此时,光学构件8000的第三边缘可以通过第二线圈4200和第四线圈4400沿光轴的向下方向倾斜,并且光学构件8000的第一边缘可以通过第二线圈4200与第四线圈4400沿光轴向上方向进一步倾斜。
[0565]
在实施例中,相机模块的倾斜驱动原理如下:使用洛伦兹力的在四个位置的驱动单元可以应用于相机模块。如图47所示,当在包括第一线圈4100和第一磁体6010的第一驱动单元以及包括第三线圈4300和第三磁体6030的第三驱动单元处以“正( )方向”产生洛伦兹力,并且在包括第二线圈4200和第二磁体6020的第二驱动单元以及包括第四线圈4400和第四磁体6040的第四驱动单元上以“负(-)方向”产生洛伦兹力时,左上对角线可以向上倾斜(图47中的a1),反之,右下对角线可以向下倾斜(图47中的a2)。在下文中,在包括第二线圈4200和第二磁体6020的第二驱动单元以及包括第三线圈4300和第三磁体6030的第三驱动单元处以“正( )方向”可以产生洛伦兹力,在包括第一线圈4100和第一磁体6010的第一驱动单元以及包括第四线圈4400和第四磁体6040的第四驱动单元处以“负(-)方向”可以产生洛伦兹力。在这种情况下,右上对角线可以向上倾斜(图47中的a3),反之,左下对角线可以向下倾斜(图47中的a4)。
[0566]
然后,在包括第一线圈4100和第一磁体6010的第一驱动单元以及包括第三线圈4300和第三磁体6030的第三驱动单元的“负(-)方向”上可以产生洛伦兹力,在包括第二线圈4200和第二磁体6020的第二驱动单元和包括第四线圈4400和第四磁体6040的第四驱动单元的“正( )方向”上可以产生洛伦兹力。在这种情况下,右下对角线可以向上倾斜(图47中的a5),反之,左上对角线可以向下倾斜(图47中的a6)。
[0567]
然后,在包括第二线圈4200和第二磁体6020的第二驱动单元以及包括第三线圈4300和第三磁体6030的第三驱动单元的“负(-)方向”上可以产生洛伦兹力,在包括第一线圈4100和第一磁体6010的第一驱动单元和包括第四线圈4400和第四磁体6040的第四驱动单元的“正( )方向”上可以产生洛伦兹力。在这种情况下,左下对角线可以向上倾斜(图47中的a7),反之,右上对角线可以向下倾斜(图47中的a8)。上面使用的正方向可以是向上的,负方向可以是向下的。在实施例中,可以在四个方向(左上、右上、右下和左下)上按顺序执行倾斜驱动。
[0568]
在实施例中,可以通过在四个位置应用驱动单元来控制驱动单元的力,这有利于精确控制。同时,可以上下对称进行倾斜,从而缩短倾斜距离。
[0569]
弹性构件7000可以连接到壳体1000。弹性构件7000可以连接到支架5000和壳体1000。弹性构件7000可以具有弹性。或者,弹性构件7000可以包括具有弹性的部分。在实施例中,弹性构件7000可以包括钢板弹簧。弹性构件7000可以由金属材料制成。
[0570]
弹性构件7000可以组装到壳体1000的壳体突起1280和支架5000的第一突起5210的突起5210a上,然后通过粘合被固定。在实施例中,由于弹性构件7000的组件和固定部分位于外侧,因此可以确保相对容易的装配结构。在实施例中,弹性构件7000可以在弹簧位置具有上下自由度的结构。根据每个实施例,弹性构件7000可以仅位于顶部,位于顶部和底部,以及仅位于底部。
[0571]
弹性构件7000可以包括第一联接部件7100和第二联接部件7200。
[0572]
第一联接部件7100可以连接到支架5000的角。可以提供两个第一联接部件7100。第一联接部件7100可以在光学构件8000的第一对角线方向上与光轴对称。两个第一联接部件可以相对于光轴相对设置。第一联接部件7100可以联接到支架5000的第一角部分和支架5000的第三角部分中的每一者。
[0573]
第二联接部件7200可以联接到壳体1000的角,该壳体1000对应于与第一联接部件7100联接的支架5000的角部分相邻的支架5000的另一角部分。
[0574]
此外,第二联接部件7200可以联接到壳体1000的壳体突起1280。在实施例中,可以提供两个第二联接部件7200。
[0575]
第二联接部件7200可以在与光学构件8000的第一对角线方向不同的第二对角线方向上与光轴对称。第二联接部件7200可以相对于光轴彼此相对设置。第二联接部件7200可以联接到壳体1000的第二角和壳体1000的第四角中的每一者。
[0576]
支架5000的突起5200a和壳体1000的壳体突起1280可以在第一方向(x轴方向)或第二方向(y轴方向)上至少部分地重叠。在实施例中,突起5200a的中心和壳体突起1280的中心可以在第一方向(x轴方向)或第二方向(y轴方向)上位移。因此,突起5200a的中心和壳体突起1280的中心在第一方向(x轴方向)或第二方向(y轴方向)上不重叠。因此,即使支架5000被安置在壳体1000的内部,也可以利用壳体1000与支架5000之间的联接力轻松地阻断撞击和振荡。如上所述,支架5000和壳体1000可以通过弹性构件7000彼此连接和固定。
[0577]
弹性构件7000可以包括弹性连接部件7300。弹性连接部件7300可以连接第一联接部件7100和第二联接部件7200。弹性连接部件7300可以弹性连接第一联接部件7100和第二联接部件7200。弹性连接部件7300可以具有弹性。弹性连接部件7300可以包括弯曲部分7310。弯曲部分7310可以是不通过折叠形成的部分,而是以之字形形成的部分。弹性连接部件7300可以包括弯曲部分或圆形部分。多个弯曲部分7310可以在弹性连接部件7300的纵向上连续形成。
[0578]
弹性构件7000可以在壳体1000的上部和支架5000的上部联接到壳体1000和支架5000。
[0579]
此外,弹性构件7000可以形成各种形状,以找到最佳形状和刚度。
[0580]
在实施例中,弹性连接部件7300的弯曲部分7310可以在对应于壳体1000的阻尼器突起1270的区域(例如,面对区域0)中形成为平坦。此外,阻尼器突起1270可以通过阻尼器构件dp连接到相邻的弹性连接部件7300。因此,弹性构件7000也可以由于支架5000、光学构件8000等的倾斜而振荡。此时,阻尼器构件dp可以通过轻松减少弹性构件7000的振动来提高元件的可靠性。阻尼器构件dp可以由被紫外线固化或热固化的材料制成。
[0581]
此外,弹性连接部件7300可以在其与第一联接部件7100和第二联接部件7200相交的点处形成圆形。
[0582]
在修改示例中,如图50所示,弹性连接部件7300可以包括多个弯曲部分7310。弹性连接部件7300可以包括弹性突起7320。此外,可以提供壳体1000的多个阻尼器突起1270-1和1270-2。此时,阻尼器突起1270-1和1270-2可以在第一方向(x轴方向)或第二方向(y轴方向)上至少部分地使弹性突起7320重叠。此外,弹性突起7320与阻尼器突起1270-1和1270-2可以通过阻尼器构件dp彼此联接。阻尼器突起1270-1和1270-2可能会阻止阻尼器构件dp流动到阻尼器突起270-1和270-2以外的区域。此外,可以将阻尼器构件dp对弹性构件7000刚度的影响降至最低。
[0583]
此外,弹性构件7000可以根据设置位置(例如支架5000的下部或上部)具有不同的连接到支架或壳体的对角线方向。因此,可以防止支架5000在初始状态下倾斜,并以相同的电流执行对角线方向控制。
[0584]
此外,在实施例中,弹性构件7000可以在第一方向(x轴方向)、第二方向(y轴方向)、和第三方向(z轴方向)上分散应力,从而不会因外部撞击产生的应力而导致变形。例如,弹性构件7000在第一方向(x轴方向)、第二方向(y轴方向)、和第三方向(z轴方向)上的安全系数可以为2或更高。
[0585]
此外,弹性连接部件7300可以位于支架5000的第一侧面、第二侧面、第三侧面和第四侧面中的每一者上,并且弹性连接部件7300被对称地设置。换句话说,弹性构件7000的弹性连接部件7300在顺时针或逆时针移动90度时可以具有相同的形状。因此,支架5000可以对称倾斜(例如,对角倾斜)。
[0586]
此外,第一联接部件7100和第二联接部件7200中的每个都具有用于与突起5210a和壳体突起1280联接的第一和第二联接孔,并且第一和第二联接孔中的每个还可以包括形成为向相邻弹性连接部件7300延伸的联接槽。联接槽可以吸收外部撞击,从而使弹性构件7000由于外部撞击而产生的变形最小化。
[0587]
在实施例中,弹性构件7000的刚度范围为53mn/mm至80mn/mm。此时,弹性构件7000的刚度可以是弹性构件7000的弹性连接部件7300的刚度。当弹性构件7000刚度小于53mn/mm时,出现的问题是,即使电流电平降低,倾斜角也大于目标倾斜角,当参考分析阶段的测量值时,80mn/mm可能是在本实施例的有限空间中的最大值。
[0588]
此外,在本实施例中,施加到线圈单元4000的电流电平可以在18ma到22ma的范围内。问题在于:在分析阶段测试中,当施加在线圈单元4000上的电流小于18ma时,当弹性构件7000的刚度为53mn/mm时,倾斜角较小,并且存在当电流超过22ma时,消耗的电流量大,线圈会产生热量的限制。
[0589]
此外,壳体1000可以包括限位器(stopper),其被配置用于限制支架5000在第一方向(x轴方向)或第二方向(y轴方向)上倾斜的范围。限位器可以位于第一壳体侧壁至第四壳体侧壁的内表面上。此外,限位器可以向内突出。
[0590]
在实施例中,限位器可以包括第一限位器st1和第二限位器st2。此外,第一限位器st1和第二限位器st2可以位于壳体1000的外部部件1200的内表面上。
[0591]
第一限位器st1可以位于第二壳体侧壁或第四壳体侧壁上。此外,第二限位器st2可以位于第一壳体侧壁或第四壳体侧壁上。通过这种配置,第一限位器st1可以限制支架5000在第二方向(y轴方向)旋转的范围。此外,第二限位器st2可以限制支架5000在第一方向(x轴方向)旋转的范围。因此,根据壳体1000与支架5000之间的分离距离,通过使施加在
弹性构件7000上的应力最小化,来防止弹性构件7000发生变形。
[0592]
此外,限位器还可以包括第三限位器st3。第三限位器st3可以位于连接部件1300的上表面上。此外,第三限位器st3可以形成为向上突出。因此,第三限位器st3可以限制支架5000在第三方向(z轴方向)旋转的范围。因此,根据壳体1000与支架5000之间的分离距离,通过使施加在弹性构件7000上的应力最小化来防止弹性构件7000发生变形。
[0593]
作为附加的修改示例,相机模块可以具有设置在下部的弹性构件。在下文中,将对下部弹性构件进行描述。下部弹性构件可以联接到壳体1000的下部和支架5000的下部。下部弹性构件包括联接到支架5000下部的第一联接区域、联接到壳体1000下部的第二联接区域、以及连接第一联接区域和第二联接区的连接区域。
[0594]
下部弹性构件的第一联接区域可以联接到支架5000的另一个角(与上部弹性构件与支架之间连接的角不同的角)。下部弹性构件的第一联接区域也可以联接到支架5000的第二突起。
[0595]
例如,在实施例中,上部弹性构件和下部弹性构件可以在不同的对角线方向上联接。换句话说,连接上部弹性构件所联接的部分的对角线方向和连接下部弹性构件所联接的部分的对角线方向可以是不同的。因此,可以防止初始状态下支架5000的倾斜,并且可以用相同的电流执行四个对角线方向的所有控制。
[0596]
图51是根据其他实施例的相机模块的立体图,图52是沿着图51中的线e-e’截取的剖视图,图53是沿着图51中的线f-f’截取的剖视图,图54是沿着图51中的线g-g’截取的剖视图。
[0597]
参考图51至图54,如上所述,第一突起5210可以在第一对角线方向上位于支架5000中,但不可以位于第二对角线方向上。在实施例中,支架5000的侧壁5200在每个角的第三方向上具有不同的长度。换句话说,在支架5000的侧壁中,第一角部分和第三角部分的长度可以大于第二角部分和第四角部分的长度。第一突起5210可以位于第一对角线方向上,例如,仅位于第一角部分和第三角部分。
[0598]
此外,第一突起5210可以被设置为在第三方向上与壳体1000的上表面间隔第一距离d1。例如,当突起5210a设置在第一突起5210上时,突起5210a的上表面和壳体1000的最上表面可以被设置成彼此间隔开第一距离d10。
[0599]
此外,由于第一突起5210被设置为在第三方向上与壳体1000的上表面相隔第一距离d1,因此支架5000可以容易地在空间中的对角线方向上倾斜第一距离d10。
[0600]
支架5000可以在第一对角线方向上以第一角度θ1旋转。由于第一角度θ1包括正/负( /-0),因此可以执行步骤1和步骤3(或步骤2和步骤4),这将在下面描述。
[0601]
此外,支架5000可以在第二对角线方向以第二角度θ2旋转。由于第二角度θ2包括正/负( /-0),因此可以执行步骤2和步骤4(或步骤1和步骤3),这将在下面描述。
[0602]
第一距离d1可以由下面的公式3确定。
[0603]
【公式3】
[0604]
l*tan(0.75*θ)≤第一距离≤l*tan(1.25*θ)
[0605]
(其中l表示基座的最大长度,θ表示支架在对角线方向的最大倾斜角度)
[0606]
θ也可以对应于为了获得sr图像而执行下面要描述的步骤1至步骤4所需的支架的倾斜角度。
[0607]
问题在于:当第一距离小于l*tan(0.75*θ)时,在支架倾斜时,支架与壳体之间会发生干涉,从而降低元件的可靠性。例如,弹性构件可能会因弹性构件的过冲而损坏。
[0608]
此外,存在的限制是:当第一距离大于l*tan(1.25*θ)时,由于壳体尺寸的增加,相机模块的总高度会增加。
[0609]
图55是描述根据其他实施例的倾斜单元的视图。
[0610]
如图55所示,相机模块可以包括控制单元clo,其可以三维倾斜光学构件(或滤光器,以下称为滤光器的倾斜)或透镜模块。如上所述,控制单元clo可以倾斜滤光器,以便通过滤光器的输入光信号的光路按照预定的规则反复移动。控制单元clo可以对应或包括上述控制单元clo。
[0611]
此外,预定的规则可以包括第一倾斜序列至第四倾斜序列。第一倾斜序列至第四倾斜序列可以允许通过滤光器的输入光信号的光路被设置在不同位置。第一至第四倾斜序列可以允许通过滤光器的输入光信号的光路沿不同的对角线方向移动。
[0612]
控制单元clo可以倾斜滤光器,以便通过滤光器的输入光信号的光路根据第一倾斜序列向传感器的左上端移动。控制单元clo可以倾斜滤光器,以便通过滤光器的输入光信号的光路根据第二倾斜序列向传感器的右上端移动。控制单元clo可以倾斜滤光器,以便通过滤光器的输入光信号的光路根据第三倾斜序列向传感器的右下端移动。控制单元clo可以倾斜滤光器,以便通过滤光器的输入光信号的光路根据第四倾斜序列向传感器的左下端移动。
[0613]
根据第一倾斜序列,控制单元clo可以倾斜滤光器,使得由滤光器的左上顶点和中心形成的线段与倾斜前的ir滤光器的参考面形成正倾斜角,由滤光器的右下顶点和中心形成的线段与该参考面形成负倾斜角。根据第二倾斜序列,控制单元clo可以倾斜滤光器,使得由滤光器的右上顶点和中心形成的线段与倾斜前的参考面形成正倾斜角,由滤光器的左下顶点和中心形成的线段与该参考面形成负倾斜角。根据第三倾斜序列,控制单元clo可以倾斜滤光器,使由滤光器右下顶点和中心形成的线段与倾斜前的滤光器表面的参考面形成正倾斜角,由滤光器左上顶点和中心形成的线段与该参考面形成负倾斜角。根据第四倾斜序列,控制单元clo可以倾斜滤光器,使得由滤光器的左下顶点和中心形成的线段与倾斜前的滤光器表面的参考面形成正倾斜角,由滤光器的右上顶点和中心形成的线段与该参考面形成负倾斜角。
[0614]
控制单元clo可以倾斜滤光器,以便重复按顺序执行的第一至第四倾斜序列的组合中的任意一者。例如,控制单元clo可以通过重复具有【第一倾斜序列-》第二倾斜序列-》第三倾斜序列-》第四倾斜序列】顺序的预定规则来倾斜滤光器。作为其他示例,控制单元clo可以通过重复具有【第二倾斜序列-》第三倾斜序列-》第一倾斜序列】顺序的预定规则来倾斜滤光器。作为其他示例,控制单元clo可以通过重复具有【第一倾斜序列-》第三倾斜序列-》第二倾斜序列-》第四倾斜序列】顺序的预定规则来倾斜滤光器。
[0615]
为了实现上述功能,控制单元clo可以包括倾斜控制器tc和倾斜驱动器td。在某些情况下,控制单元clo可以包括倾斜致动器ta,但在下文中,将描述为单独的部件。此外,倾斜致动器ta可以包括在光接收单元2中,并由上述线圈单元和磁体单元驱动。下面将对其进行详细描述。
[0616]
首先,倾斜控制器tc可以生成用于控制倾斜驱动器td的驱动的控制信号。倾斜控
制器tc可以是能够生成控制信号的微控制器单元(mcu),但不限于此。倾斜控制器tc可以将生成的控制信号输入到倾斜驱动器td。倾斜控制器tc可以通过内部集成电路(i2c)通信方法向倾斜驱动器td发送和接收控制信号。例如,在i2c通信中,倾斜控制器tc可以是处于主模式下的设备,倾斜驱动器td可以是处于从属模式下的设备。主模式下的倾斜控制器tc可以将控制信号传输至从属模式下的倾斜驱动器td。为此,倾斜控制器tc可以连接到每个串行时钟(scl)通信线和串行数据(sda)通信线。例如,倾斜控制器tc通过i2c方法与倾斜驱动器td通信,但不限于此。
[0617]
倾斜控制器tc可以通过控制信号控制倾斜驱动器td的开/关。换句话说,控制信号可以包括可以控制倾斜驱动器td的操作开始和操作停止的信息。倾斜控制器tc可以通过控制信号控制倾斜驱动器td的输出信号的电压电平。换句话说,控制信号可以包括可以控制倾斜驱动器td输出信号电压幅度的信息。倾斜控制器tc可以通过控制信号控制延迟时间。换句话说,控制信号可以包括关于延迟时间的控制信息。这里,延迟时间可以指生成触发信号的特定波形的时间点与生成输出信号的特定波形的时间点之间的间隔。倾斜控制器tc可以通过控制信号控制帧时间。换句话说,控制信号可以包括关于帧时间的控制信息。这里,帧时间可以是指相机装置生成一个图像帧所需的时间,并且可以是在触发信号中生成特定波形的周期。
[0618]
同时,如图55a所示,倾斜控制器tc可以设置在相机模块的外部。例如,当相机模块被安装在移动终端中时,倾斜控制器tc可以设置在移动终端中。在这种情况下,包括在相机模块中的控制单元clo可以被配置为包括倾斜驱动器td。在其他实施例中,倾斜控制器tc可以包括在控制单元clo中,如图55b所示。例如,倾斜控制器tc可以设置在相机模块的一个空间中。在这种情况下,包括在相机模块中的控制单元clo可以包括倾斜驱动器td和倾斜控制器tc。
[0619]
倾斜驱动器td可以基于从传感器(例如,图像传感器)接收到的触发信号生成与上述传感器的积分时间同步的输出信号。
[0620]
倾斜驱动器td可以接收来自相机模块的电压。在实施例中,倾斜驱动器td可以接收从相机模块提供的电压分支的第一电压和第二电压。控制单元clo还可以包括电感器作为分支元件,以便将来自相机模块电源的电压输入分支为第一电压和第二电压。分支的第一电压和第二电压中的每一者都可以被输入到倾斜驱动器td。第一电压可以是用于驱动倾斜驱动器td的电压,第二电压可以是用来驱动倾斜致动器ta的电压。第一电压和第二电压可以具有相同的电压幅度,并且可以是3.3【v】的dc电压,但不限于此。倾斜驱动器td可以包括被配置为接收第一电压的第一电源输入端子和被配置为接收第二电压的第二电源输入端子。
[0621]
倾斜驱动器td可以接收触发信号。触发信号可以从传感器,即图像传感器输出。触发信号可以是具有一定周期的方波信号。倾斜驱动器td可以使用触发信号来同步倾斜致动器ta的驱动周期和传感器的驱动周期。倾斜驱动器td可以包括被配置为接收触发信号的端子。
[0622]
倾斜驱动器td可以接收来自倾斜控制器tc的控制信号。倾斜驱动器td可以包括通信连接端子,用于与倾斜驱动器td进行通信连接。当使用i2c通信方法时,通信连接端子可以由两个端子组成。
[0623]
倾斜驱动器td基于从相机模块接收到的电压和触发信号以及从倾斜控制器tc接收到的控制信号生成输出信号。将参考以下附图详细描述输出信号的生成。
[0624]
倾斜驱动器td可以向倾斜致动器ta输出输出信号。输出信号是由两个通道组成的信号,并且可以包括第一输出信号和第二输出信号。因此,倾斜驱动器td可以包括被配置为输出第一输出信号的第一输出端子和被配置为输出第二输出信号的输出端子,并且每个端子可以通过信号线连接到倾斜致动器ta。然而,输出信号可能根据通道的不同而不同。下面将根据不同的实施例对此进行描述。
[0625]
倾斜致动器ta可以通过输出信号沿对角线方向倾斜滤光器。倾斜致动器ta可以包括第一驱动单元至第四驱动单元,并且每个驱动单元可以包括一个线圈和一个磁体。换句话说,倾斜致动器ta可以包括磁体单元和线圈单元。此外,倾斜致动器ta还可以包括上述基板3000和支架5000。因此,滤光器可以通过接收第一输出信号、第二输出信号等在对角线方向或水平方向倾斜。
[0626]
例如,第一输出信号可以被输入到第一驱动单元和第三驱动单元。具体而言,第一输出信号可以被输入到第一驱动单元的第一线圈和第三驱动单元的第三线圈。第二输出信号可以被输入到第二驱动单元和第四驱动单元。具体而言,第一输出信号可以被输入到第二驱动单元的第二线圈和第四驱动单元的第四线圈。换句话说,倾斜致动器ta可以通过包括第一输出信号和第二输出信号的输出信号沿对角线方向倾斜滤光器。
[0627]
在实施例中,倾斜致动器ta可以将第一输出信号和第二输出信号中的至少一个应用于线圈单元,相应地,相机模块可以沿对角线方向或水平方向倾斜滤光器。
[0628]
图56是具体描述倾斜致动器的视图。
[0629]
图56a显示了倾斜致动器ta的第一线圈至第四线圈设置在基板3000上的形式。第一至第四线圈可以设置在基板3000上,彼此间隔开一定距离。基板3000可以以这样的形式实施,即基板3000可以在第一线圈与第二线圈之间、第二线圈与第三线圈之间、以及第三线圈与第四线圈之间折叠。
[0630]
在第一至第四线圈中彼此面对的线圈可以形成反向平行结构,其中流过线圈的电流方向彼此相反。换句话说,第一线圈和第三线圈可以在彼此平行的结构中形成,而第二线圈和第四线圈可以在彼此反向平行的结构中形成。由于第一线圈和第三线圈具有彼此反向平行的结构,因此流过第一线圈的电流i1和流过第三线圈的电流l3可以彼此反向平行(i1=-i3)。由于第二线圈和第四线圈具有彼此反向平行的结构,因此流过第二线圈的电流i2和流过第四线圈的电流l4可以彼此反向平行(i2=-i4)。
[0631]
在实施例中,相机模块可以将第一输出信号和第二输出信号均应用于倾斜致动器ta,以便沿对角线方向倾斜滤光器。然而,在帧周期中,相机模块可以只向倾斜致动器ta应用第一输出信号和第二输出信号中的一个,以便在水平方向倾斜滤光器。例如,在帧周期内,第一输出信号和第二输出信号可以在不重叠时间的情况下被应用于倾斜致动器ta。通过这种配置,可以提高信号输出的能量效率。
[0632]
图56b示出了印刷电路板4,其上设置有供第一线圈至第四线圈设置的基板3000。配备有倾斜致动器ta的焊盘可以设置在印刷电路板4的设置光接收单元的部分上。焊盘可以包括第一焊盘和设置在朝向第一焊盘的位置处的第二焊盘。
[0633]
图56c显示了一种设置有图56a中所示的第一线圈至第四线圈的基板联接到印刷
电路板4的形式。设置有图56a中所示的第一线圈至第一线圈的基板可以具有矩形形状,该矩形形状以规则的间隔和规则的角度被折叠。其上设置矩形的第一至第四线圈的基板3000可以联接到印刷电路板4。设置在印刷电路板4上的第一焊盘和第二焊盘可以联接到供第一线圈和第二线圈设置在其上的基板的一部分。此时,基板和印刷电路板4可以通过焊接第一焊盘和第二焊盘的部分来联接。第一磁体至第四磁体可以被设置成分别对应于第一线圈至第四线圈。第一输出信号x可以被输入到第一线圈和第三线圈。第二输出信号y可以被输入到第二线圈和第四线圈。
[0634]
图57a是用于描述倾斜单元的驱动序列的视图,图57b是用于描述步骤1中图57a中驱动单元的输出的视图,图57c是用于描述图57a中的驱动单元的每个帧周期的输出的视图。
[0635]
图57a示出根据触发信号生成的第一输出信号和第二输出信号。第一输出信号可以被输入到第一线圈和第三线圈,第二输出信号可以被输入到第二线圈和第四线圈。
[0636]
如图57a所示,触发信号可以是方波信号,其中在规定的周期内产生脉冲。触发信号可以响应于上述传感器的传感器驱动(积分时间)的驱动而产生。此外,脉冲间隔,即触发信号的脉冲周期可以是一个帧间隔。此外,从触发信号的脉冲的上升沿(rising edge)到触发信号的下一脉冲的上升沿的间隔可以是一个帧间隔。触发信号的脉冲宽度可以设置为小于一个帧间隔。
[0637]
在倾斜致动器的驱动序列开始之前,即在默认状态下,第一输出信号和第二输出信号的电流电平可以为level 0。这里,level 0可以指0【a】的电流,但不限于此。
[0638]
当倾斜致动器的驱动序列开始时,基于触发信号脉冲的下降沿,经过设定的延迟时间(delay t)之后,控制第一输出信号和第二输出信号的电流电平。可以针对每个帧间隔控制第一输出信号和第二输出信号的电流电平。可以控制第一输出信号和第二输出信号,使其对于每个帧间隔具有高电平电流或低电平电流。高电平电流可以指电流值大于参考电平电流值的状态,低电平电流可以指电流值小于参考电平电流的状态。例如,当参考电平设置为0【a】时,高电平可以指具有( )值的电流,而低电平可以指具有(-)值的电流。换句话说,参考电平可以是不施加电流的电平。当输出信号的电流电平在连续步骤中不同时,增加或降低电流电平可能需要预定的时间。
[0639]
下表1是示出图57a中所示的第一输出信号和第二输出信号的表。
[0640]
【表1】
[0641]
步骤第一输出信号x第二输出信号y1(-)( )2( )( )3( )(-)4(-)(-)
[0642]
在表1中,(-)表示低电平电流,( )表示高电平电流。低电平电流和高电平电流可以指具有相同幅度和不同方向的电流。此外,步骤1表示第一倾斜序列,步骤2表示第二倾斜序列,步骤3表示第三倾斜序列和步骤4表示第四倾斜序列。当倾斜致动器ta的驱动序列开始时,第一输出信号和第二输出信号的电流电平可以在第一脉冲的下降沿经过设定的延迟时间之后被控制(步骤1)。第一输出信号可以控制为从参考电平电流到低电平电流。第二输
出信号可以控制为从参考电平电流到高电平电流。换句话说,在步骤1中,第一输出信号可以被控制为具有低电平电流,并且第二输出信号可以控制为具备高电平电流。
[0643]
第一输出信号和第二输出信号可以包括第一信号sg1和第二信号sg2。
[0644]
首先,基于第一输出信号,第二信号sg2可以在第一信号sg1之后连续出现。此外,第一信号sg1可以具有第一幅度a1或a1’。此外,第二信号sg2可以具有第二幅度a2或a2’。这里,第二信号sg2可以对应于上述高电平或低电平电流。此外,高电平或低电平电流可以是设置为倾斜滤光器的值。应当理解,由于滤光器的倾斜度根据传感器的大小、传感器中像素的大小、透镜模块的类型等而改变,因此高电平或低电平电流也可能相应地改变。
[0645]
此外,第一信号sg1的第一幅度a1或a1’可以是参考电平(例如level0)与第二信号sg2的第二幅度a2或a2’之间的值。因此,第二信号sg2的第二幅度a2或a2’可以大于第一信号sg1的第一幅度a1或a1’。第一信号sg1的第一幅度a1或a1’可以是第二信号sg2的第二幅度a2或a2’的0.3倍至0.7倍。例如,第一信号sg1的第一幅度a1或a1’可以设置为第二信号sg2的第二幅度a2或a2’的0.5倍。
[0646]
此外,第一信号sg1可以被保持第一周期ta。第一周期可以是倾斜致动器自然振荡周期的0.6倍至0.9倍。当第一周期小于倾斜致动器自然振荡周期的0.6倍时,第二信号的振荡可能不容易被消除。此外,当第一周期大于倾斜致动器自然振荡周期的0.9倍时,时间响应的减少是有限的。自然振荡周期是自然频率(natural frequency)的倒数,此时,自然频率可以是考虑到衰减的实际倾斜致动器的自然频率或弹簧-阻尼器系统的衰减自然频率。
[0647]
如上所述,第一输出信号和第二输出信号在第二信号sg2之前具有连续的第一信号sg1,因此与阈值响应相比,可以提供改进的时间响应。换句话说,根据其他实施例的倾斜致动器包括弹性构件。此外,由于倾斜致动器具有被称为倾斜的机械驱动,倾斜致动器可以是一系统,其中将机械驱动和弹性结合的振动计的运动被最终执行。此外,输出信号可以是应用于运动的输入,并且上述第一至第四驱动单元的位置可以是作为根据输入生成的位移的输出。
[0648]
此外,倾斜致动器的时间响应可以是具有响应于输出信号的上升时间、过冲和设置时间。根据其他实施例的倾斜致动器的输出信号具有第一信号sg1和第二信号sg2,因此可以通过减少过冲和设置时间,通过倾斜轻松生成帧图像。
[0649]
根据实施例,倾斜致动器的第一信号sg1和第二信号sg2可以根据作为时间响应的阈值衰减提供对应于响应的输出。换句话说,倾斜致动器的第一信号sg1和第二信号sg2可以提供对应于阈值衰减的第一至第四驱动单元的运动。通过这种配置,根据本发明其他实施例的倾斜致动器可以快速准确地倾斜滤光器。
[0650]
此外,当其他输出信号的第二信号被保持或关闭(未应用)时,可以输出第一信号。例如,当第一输出信号的第二信号被保持在高电平或低电平或改变为参考电平时,可以输出第二输出信号的第一信号。
[0651]
图57b(a)是示出当输出信号仅由第二信号组成时,驱动单元在一个帧周期内移动的视图,图57b(b)是示出根据其他实施例的输出信号情况下驱动单元在一个帧周期内移动的视图。当霍尔传感器或位置传感器检测到驱动单元的移动时,驱动单元的运动在此图中显示为电压(v)。
[0652]
参考图57b(a)和图57b(b),如上所述,可以看出,当输出信号包括第一信号sg1和
第二信号sg2时的过冲小于当输出信号仅由第二信号sg2组成时的过冲,以及当输出信号包括第一信号sg1和第二信号sg2时的振荡幅度小于当输出信号仅由第二信号sg2组成时的振荡幅度。此外,可以看出,当输出信号包括第一信号sg1和第二信号sg2时的稳定时间也小于当输出信号仅包括第二信号sg2的稳定时间。因此,根据其他实施例的倾斜致动器可以快速地将滤光器倾斜到所需角度,并减少由于倾斜而产生的振荡,从而通过下面描述的sr技术提高图像的分辨率。
[0653]
图57c(a)是示出当输出信号仅由第二信号组成时,驱动单元在多个帧周期内移动的视图,图57b(b)是显示根据其他实施例的输出信号情况下,驱动单元在多个帧周期内移动的图。
[0654]
参考图57c(a)和图57c(b),可以看出,当输出信号包括第一信号sg1和第二信号sg2时的过冲小于当输出信号仅由第二信号sg2组成时的过冲,以及当输出信号包含第一信号sg1和第二信号sg2的振荡幅度小于当输出信号为即使对于多个帧周期也仅由第二信号sg2组成时的振荡幅度。此外,可以看出,如上所述,稳定时间被缩短。
[0655]
此外,在第二脉冲的下降沿经过设定的延迟时间之后,可以控制第一输出信号和第二输出信号的电流电平(步骤2)。第一输出信号可以从步骤1中控制的低电平电流控制到高电平电流。第二输出信号可以被控制以保持步骤1中控制的高电平电流。换句话说,在步骤2中,第一输出信号可以被控制为具有高电平电流,第二输出信号被控制为具有高电平电流。
[0656]
如上所述,第一输出信号可以具有从第二脉冲的下降沿经过设置的延迟时间之后的第一信号,并且具有在第一信号之后的高电平的第二信号。
[0657]
在第三脉冲的下降沿经过设定的延迟时间之后,可以控制第一输出信号和第二输出信号的电流电平(步骤3)。可以控制第一输出信号以保持步骤2中控制的高电平电流。可以控制第二输出信号从步骤2中控制的高电平电流到低电平电流。换句话说,在步骤3中,可以控制第一输出信号以具有高电平电流,并且可以控制第二输出信号以具备低电平电流。
[0658]
此外,第二输出信号可以具有从第三脉冲的下降沿经过设置的延迟时间之后的第一信号,并且具有在第一信号之后的低电平的第二信号。
[0659]
在第四脉冲的下降沿经过设定的延迟时间之后,可以控制第一输出信号和第二输出信号的电流电平(步骤4)。第一输出信号可以被控制从步骤3中控制的高电平电流到低电平电流。第二输出信号可以被控制保持步骤3中控制的低电平电流。换句话说,在步骤4中,第一输出信号可以被控制为具有低电平电流,并且第二输出信号可以被控制为具备低电平电流。
[0660]
第一输出信号可以具有从第四脉冲的下降沿经过设置的延迟时间之后的第一信号,并且具有在第一信号之后的低电平的第二信号。
[0661]
步骤1至步骤4可以在一个循环中操作,并可以在倾斜致动器ta的驱动序列运行时连续重复。
[0662]
此外,在步骤1和步骤2中,由于第二输出信号被保持为第一信号之后的第二信号(高电平),因此可以降低控制输出信号的能耗,并进一步降低驱动单元(第二和第四驱动单元)的振荡,从而可以更精确地倾斜滤光器。
[0663]
此外,在步骤2和步骤3中,由于第一输出信号被保持为第一信号之后的第二信号
(高电平),因此可以降低控制输出信号的能耗,并进一步降低驱动单元(第一和第三驱动单元)的振荡,从而可以更精确地倾斜滤光器。
[0664]
此外,在步骤3和步骤4中,由于第二输出信号被保持为第一信号之后的第二信号(低电平),因此可以降低控制输出信号的能耗,进一步降低驱动单元(第二和第四驱动单元)的振荡,从而可以更精确地倾斜滤光器。
[0665]
下表2示出了倾斜致动器ta驱动序列的修改示例。
[0666]
【表2】
[0667]
步骤第一输出信号x第二输出信号y1( )( )2( )(-)3(-)(-)4(-)( )
[0668]
如表2所示,参照表1和图57a描述的第一输出信号和第二输出信号的每个步骤的电流电平是一个实施例,可以按照修改示例中的其他组合进行设置。为此,可以通过倾斜控制器tc的控制信号设置第一输出信号和第二输出信号的每个步骤的电流电平。参照表1描述的关于倾斜致动器的内容可以以相同的方式被应用。然而,在步骤1和步骤2中,由于第一输出信号被保持为第一信号之后的第二信号(高电平),因此可以降低控制输出信号的能耗,进一步降低驱动单元(第一个和第三个驱动单元)的振荡,从而可以更精确地倾斜滤光器。
[0669]
此外,在步骤2和步骤3中,由于第二输出信号被保持为第一信号之后的第二信号(低电平),因此可以降低控制输出信号的能耗,并进一步降低驱动单元(第二和第四驱动单元)的振荡,从而可以更精确地倾斜滤光器。
[0670]
此外,在步骤3和步骤4中,由于第一输出信号被保持为第一信号之后的第二信号(低电平),因此可以降低控制输出信号的能耗,进一步降低驱动单元(第一和第三驱动单元)的振荡,从而可以更精确地倾斜滤光器。
[0671]
图58示出了根据第一其他实施例的光路移动过程。图59是概念图,概念性地依次示出根据第一其他实施例的相机模块中的超分辨率(sr)技术所获得的多个图像。图60是依次示出根据第一其他实施例的相机模块中的sr技术所获取的第一至第四帧的图像的视图。
[0672]
首先,在倾斜致动器驱动序列开始前的步骤0(空档序列,neutral sequence)中,滤光器可以被保持在不被倾斜的状态。图59a显示了步骤0中输入光的光路。在图59中,点表示像素相对于输入光的中心。在步骤0中,像素相对于输入光的中心和像素相对于传感器的中心可以相互匹配。换句话说,这意味着通过滤光器的光路没有改变。
[0673]
当倾斜致动器的驱动序列开始时,倾斜致动器可以根据步骤1倾斜滤光器。由于根据步骤1进行倾斜,滤光器的左上端可以向上移动,右下端可以相对于参考面向下移动。参考面可以指步骤0中放置滤光器的面。向上移动可以指远离传感器,向下移动可以指靠近传感器。图59b示出了步骤1中输入光的光路。当滤光器根据步骤1倾斜时,输入光的光路可以从参考光路向左移动0.25像素,向上移动0.25个像素。然后,根据本发明其他实施例的相机模块可以从根据步骤1移动的光路中获取第一帧图像。
[0674]
按照步骤1的倾斜致动器驱动序列之后,倾斜致动器可以根据步骤2倾斜滤光器。
由于根据步骤2的倾斜,滤光器右上端可能会向上移动,左下端可能会相对于参考面向下移动。在步骤1中向上或向下移动的滤光器左上端和右下端的边缘可以移动到参考位置。图59c显示了步骤2中输入光的光路。当滤光器根据步骤2倾斜时,输入光的光路可以从参考光路向右移动0.25像素,向上移动0.25个像素。在步骤1中,输入光的光路可以相对于输入光的光路向右移动0.5像素。然后,根据本发明其他实施例的相机模块可以从根据步骤2移动的光路中获取第二帧图像。
[0675]
按照步骤2的倾斜致动器驱动序列之后,倾斜致动器可以根据步骤3倾斜滤光器。由于根据步骤3的倾斜,滤光器的左上端可以向下移动,右下端可能相对于参考面向上移动。在步骤2中向上或向下移动的滤光器右上端和左下端的边缘可以移动到参考位置。图59d显示了步骤3中输入光的光路。当滤光器根据步骤3倾斜时,输入光的光路可以从参考光路向右移动0.25像素,向下移动0.25个像素。在步骤2中,输入光的光路可以相对于输入光的光路向下移动0.5像素。然后,根据本发明其他实施例的相机模块可以从根据步骤3移动的光路中获取第三帧图像。
[0676]
按照步骤3的倾斜致动器驱动序列之后,倾斜致动器可以根据步骤4倾斜滤光器。由于根据步骤4的倾斜,滤光器右上端可能会向上移动,左下端可能相对于参考面向下移动。在步骤3中向上或向下移动的滤光器左上端和右下端的边缘可以移动到参考位置。图59e显示了步骤4中输入光的光路。当滤光器根据步骤4倾斜时,输入光的光路可以从参考光路向左移动0.25像素,向下移动0.25个像素。在步骤2中,输入光的光路可以相对于输入光的光路向左移动0.5像素。然后,根据本发明其他实施例的相机模块可以从根据步骤4移动的光路中获取第四帧图像。
[0677]
倾斜致动器被描述为具有vcm结构,其中应用了磁体和线圈,但是,本发明不限于此,并且本发明也可以通过液体透镜来实现,液体透镜可以通过控制一个或两个(形成共同界面的导电液体或非导电液体)或多个液体来控制光路,或者可变透镜,例如被配置为通过控制薄膜和液体来控制光路的光学构件。
[0678]
此外,第一输出信号和第二输出信号可以由单独驱动的倾斜驱动器生成。例如,倾斜驱动器可以包括多个驱动器。倾斜驱动器包括第一倾斜驱动器和第二倾斜驱动器,其中,第一倾斜驱动器可以生成第一输出信号并将第一输出信号发送到倾斜致动器,第二倾斜驱动器可以生成第二输出信号并将第二输出信号发送到倾斜致动器。因此,当未生成第一输出信号或第二输出信号中的至少一个时(例如,level 0),第一倾斜驱动器和第二倾斜驱动器可以单独生成输出信号以降低倾斜驱动器的能耗。这也可以以同样的方式应用于其他实施例。
[0679]
图61是用于描述sr图像的视图。
[0680]
图61示出了使用通过步骤1到步骤4生成的第一帧至第四帧图像生成一个高分辨率sr图像的过程。为了便于描述,图61示出假设第一帧到第四帧图像中的每个都是4x4帧图像,即由16像素组成的图像。
[0681]
如图61所示,响应于光路的移动方向,通过处理四个帧图像的像素值,可以生成一个sr图像。换句话说,大小为4x4(16像素)的第一帧到第四帧图像可以是大小为8x8(64像素)的一个sr图像。
[0682]
在假设第一帧至第四帧的左上端的像素是像素1,其右下端的像素是像素16,并且
假设sr图像的左上端的像素是像素1以及其右下端的像素是像素64的情况下,将描述处理像素值的过程。
[0683]
第一帧图像的从参考光路向左移动0.25像素向上移动0.25像素的像素1可以被设置为sr图像的像素1的值。第一帧图像的像素2可以被设置为sr图像的像素3的值。第一帧图像的像素3可以被设置为sr图像的像素5的值。第一帧图像的像素4可以被设置为sr图像的像素7的值。
[0684]
第二帧图像的从参考光路向右移动0.25像素,向上移动0.25像素的像素1可以被设置为sr图像的像素2的值。第二帧图像的像素2可以被设置为sr图像的像素4的值。第二帧图像的像素3可以被设置为sr图像的像素6的值。第二帧图像的像素4可以被设置为sr图像的像素8的值。
[0685]
第三帧图像的从参考光路向右移动0.25像素向下移动0.25像素的像素1可以被设置为sr图像的像素9的值。第三帧图像的像素2可以被设置为sr图像的像素11的值。第三帧图像的像素3可以被设置为sr图像的像素13的值。第三帧图像的像素4可以被设置为sr图像的像素15的值。
[0686]
第四帧图像的从参考光路向左移动0.25像素向下移动0.25像素的像素1可以被设置为sr图像的像素10的值。第四帧图像的像素2可以被设置为sr图像的像素12的值。第四帧图像的像素3可以被设置为sr图像的像素14的值。第四帧图像的像素4可以被设置为sr图像的像素16的值。
[0687]
如上所述,可以对第一帧至第四帧图像的像素值进行处理以生成一个sr图像。换句话说,通过四个图像获取一个图像。因此,100fps的图像可以是25fps的sr图像。
[0688]
同时,图像合成部件可以通过移除sr图像的最外层像素,即图61中阴影的像素值来校正sr图像。设置在sr图像最外层的像素值可以包括与倾斜过程中要捕获的信息无关的数据。图像合成部件可以去除最外层像素的阴影,以便去除与要捕获的信息无关的数据。
[0689]
尽管参考附图描述了本发明的实施例,但本发明所属领域的技术人员将能够理解,本发明可以以其他特定形式实施,而不会改变其技术构思或基本特征。因此,应当理解,上述实施例在所有方案都是说明性的,而非限制性的。
[0690]
图62是描述根据第二其他实施例的倾斜单元的驱动序列的视图。
[0691]
参考图62,图62示出根据触发信号生成的第一输出信号和第二输出信号。如上所述,第一输出信号可以被输入到第一线圈和第三线圈,第二输出信号可以被输入到第二线圈和第四线圈。
[0692]
如图62所示,触发信号可以是方波信号,其中在规定的周期内产生脉冲。触发信号可以响应于上述传感器的传感器驱动(积分时间)的驱动而产生。此外,脉冲间隔,即触发信号的脉冲周期可以是一个帧间隔。此外,从触发信号的脉冲的上升沿到触发信号的下一脉冲的上升沿的间隔可以是一帧间隔。触发信号的脉冲宽度可以设置为小于一个帧间隔。
[0693]
在倾斜致动器的驱动序列开始之前,即在默认状态下,第一输出信号和第二输出信号的电流电平可以为level 0。这里,level 0可以是未施加电流的电平。例如,level 0可以指电流为0【a】,但不限于此。上述内容可以同样的方式适用于上述描述。
[0694]
此外,如上所述,当倾斜致动器的驱动序列开始时,基于触发信号脉冲的下降沿,经过设定的延迟时间(delay t)之后,控制第一输出信号和第二输出信号的电流电平。可以
针对每个帧间隔控制第一输出信号和第二输出信号的电流电平。可以控制第一输出信号和第二输出信号,使其相对于每个帧间隔具有高电平电流或低电平电流。高电平电流可以是指电流值大于参考电平电流值的状态,低电平电流可以指电流值小于参考电平电流值的状态。例如,当参考电平设置为0【a】时,高电平可指具有( )值的电流,而低电平可指具有(-)值的电流。当输出信号的电流电平在连续步骤中不同时,可能需要预定的时间来增加或减少电流电平。
[0695]
下表3是示出图62中所示的第一输出信号和第二输出信号的表。
[0696]
【表3】
[0697]
步骤第一输出信号x第二输出信号y1( )level 02level 0( )3(-)level 04level 0(-)
[0698]
在表3中,(-)表示低电平电流,( )表示高电平电流。level 0可以是参考电平。此外,低电平电流和高电平电流可以指具有相同幅度和不同方向的电流。此外,步骤1表示第一倾斜序列,步骤2表示第二倾斜序列,步骤3表示第三倾斜序列和步骤4表示第四倾斜序列。当倾斜致动器的驱动序列开始时,第一输出信号和第二输出信号的电流电平可以在第一脉冲的下降沿经过设定的延迟时间之后被控制(步骤1)。第一输出信号可以被控制为从参考电平电流到高电平电流。第二输出信号可以被控制为参考电平。换句话说,在步骤1中,第一输出信号可以被控制为具有高电平电流,并且第二输出信号可以被控制具有参考电平电流。
[0699]
在第二脉冲的下降沿经过设定的延迟时间之后,可以控制第一输出信号和第二输出信号的电流电平(步骤2)。第一输出信号可以被控制从步骤1中控制的高电平电流到参考电平电流。第二输出信号可以被控制从步骤1中控制的参考电平电流到高电平电流。换句话说,在步骤2中,第一输出信号可以被控制为具有参考电平电流,第二输出信号可以被控制为具有高电平电流。
[0700]
如上所述,第二输出信号可以具有从第二脉冲的下降沿经过设置的延迟时间之后的第一信号,并且具有在第一信号之后的高电平的第二信号。
[0701]
换句话说,第一输出信号和第二输出信号可以包括第一信号sg1和第二信号sg2。
[0702]
基于第一输出信号,第二信号sg2可以在第一信号sg1之后连续出现。此外,第一信号sg1可以具有第一幅度。此外,第二信号sg2可以具有第二幅度。这里,第二信号sg2可以对应于上述高电平或低电平电流。此外,高电平或低电平电流可以是设置为倾斜滤光器的值。应当理解,由于滤光器的倾斜度根据传感器的大小、传感器中像素的大小、透镜模块的类型等而改变,因此高电平或低电平电流也可以相应地改变。
[0703]
此外,第一信号sg1的第一幅度可以是参考电平(例如level 0)与第二信号sg2的第二幅度之间的值。第二信号sg2的第二幅度可以大于第一信号sg1的第一幅度。
[0704]
此外,第一信号sg1可以被保持第一周期ta。第一周期可以是倾斜致动器的自然振荡周期的0.6倍至0.9倍。当第一周期小于倾斜致动器自然振荡周期的0.6倍时,由第二信号的振荡可能不容易被消除。此外,当第一周期大于倾斜致动器自然振荡周期的0.9倍时,时
间响应的减少是有限的。
[0705]
通过这种配置,第一输出信号和第二输出信号在第二信号sg2之前具有连续的第一信号sg1,从而提供比阈值响应更好的时间响应。此外,根据其他实施例的倾斜致动器具有第一信号sg1和第二信号sg2,因此可以通过减少过冲和设置时间,通过倾斜轻松地生成帧图像。
[0706]
在第三脉冲的下降沿经过设定的延迟时间之后,可以控制第一输出信号和第二输出信号的电流电平(步骤3)。第一输出信号可以被控制从步骤2中控制的参考电平电流到低电平电流。第二输出信号可以被控制从步骤2中控制的高电平电流到参考电平电流。换句话说,在步骤3中,第一输出信号可以控制为具有低电平电流,并且第二输出信号可以被控制为具有参考电平电流。
[0707]
此外,第一输出信号可以具有从第三脉冲的下降沿经过设置的延迟时间之后的第一信号,并且具有在第一信号之后的低电平的第二信号。
[0708]
在第四脉冲的下降沿经过设定的延迟时间之后,可以控制第一输出信号和第二输出信号的电流电平(步骤4)。第一输出信号可以被控制从步骤3中控制的低电平电流到参考电平电流。第二输出信号可以被控制从步骤3中控制的参考电平电流到低电平电流。换句话说,在步骤4中,第一输出信号可以控制为具有参考电平电流,并且第二输出信号可以被控制为具备低电平电流。
[0709]
第二输出信号可以具有从第四脉冲的下降沿经过设置的延迟时间之后的第一信号,并且具有在第一信号之后的低电平的第二信号。
[0710]
此外,步骤1至步骤4可以在一个循环中运行,并可以在倾斜致动器的驱动序列运行时连续重复。
[0711]
在实施例中,第一输出信号可以具有对应于第一触发信号的1-1输出信号和对应于第三触发信号的1-2输出信号。换句话说,1-1输出信号是步骤1中的第一输出信号,1-2输出信号是步骤3中的第一输出信号。
[0712]
此外,第二输出信号可以具有对应于第二触发信号的2-1输出信号和对应于第四触发信号的2-2输出信号。换句话说,2-1输出信号是步骤2中的第二输出信号,而2-2输出信号是步骤4中的第一输出信号。
[0713]
1-1输出信号可以与1-2输出信号的方向相反。此外,2-1输出信号可以与2-2输出信号的方向相反。此外,2-1输出信号可以应用于1-1输出信号与1-2输出信号之间,1-2输出信号可以用于2-1输出信号与2-2输出信号之间。
[0714]
如上所述,在1-1输出信号和1-2输出信号之间有一个保持参考电平电流的段(施加2-1输出信号的段)。此外,在2-1输出信号和2-2输出信号之间有一个保持参考电平电流的段(施加1-2输出信号的段)。
[0715]
如前所述,在施加高或低电平电流之前,第一输出信号和第二输出信号被降低至参考电压,以便能够将第一输出信号与第二输出信号对下一序列的线圈中残余电流的影响降至最低。例如,由于倾斜致动器中剩余的电流通过区段被1-1输出信号衰减,在该区段中参考电平电流被保持在1-1输出信号与1-2输出信号之间,因此在1-2输出信号驱动倾斜致动器时,初始电流值可以接近零。通过这种配置,可以减少由于滤光器通过倾斜致动器倾斜而引起的振荡。
[0716]
此外,如上所述,当提供多个倾斜驱动器时,在参考电平电流被保持在1-1输出信号与1-2输出信号之间的区段停止对倾斜驱动器的驱动,从而可以降低倾斜致动器的能耗。
[0717]
图63是描述根据第二其他实施例通过驱动倾斜单元对滤光器倾斜控制的视图,图64是示出根据第二其他实施例的光路移动过程的视图,图65是概念图,概念性地依次示出根据第二其他实施例的相机模块中的超分辨率(sr)技术所获得的多个图像。
[0718]
参考图63至图65,根据其他实施例的相机模块可以获取用于除了上述对角倾斜外,还可以水平倾斜的sr技术的多个图像。
[0719]
在步骤0(空档序列)中,在倾斜致动器驱动序列开始之前,光学构件件(或滤光器)可以保持在不被倾斜的状态。图65a示出了步骤0中输入光的光路。在图65中,点表示像素相对于输入光的中心。在步骤0中,像素相对于输入光的中心与像素相对于传感器的中心可以相互匹配。换句话说,这意味着通过光学构件(或滤光器)的光的光路没有改变。
[0720]
当倾斜致动器的驱动序列开始时,倾斜致动器可以根据步骤1在水平方向上倾斜光学构件(或滤光器)。由于根据步骤1的倾斜,光学构件(或者滤光器)的左侧可以向下移动,其右侧可以相对于参考面向上移动。参考面可以指在步骤0中设置有光学构件(或滤光器)的面。向上移动可以指远离传感器,向下移动可以指靠近传感器。图65b示出了步骤1中输入光的光路。当光学构件(或滤光器)根据步骤1倾斜时,输入光的光路可以从参考光路向右移动0.25像素。像素的移动可能会根据sr技术或传感器而改变。换句话说,应当理解,像素相对于参考光路的移动距离可以因倾斜致动器的驱动序列而改变。
[0721]
首先,可以从根据步骤1移动的光路中获取第一帧图像。
[0722]
根据步骤1的倾斜致动器驱动序列之后,倾斜致动器可以根据步骤2倾斜光学构件(或滤光器)。由于根据步骤2的倾斜,光学构件(或者滤光器)的上端可以向上移动,其下端可以相对于参考面向下移动。
[0723]
图65c示出了步骤2中输入光的光路。当光学构件(或滤光器)根据步骤2倾斜时,输入光的光路可以从参考光路向上移动0.25像素。在步骤1中,输入光的光路可以相对于输入光的光路向上移动0.25像素。然后,根据本发明其他实施例的相机模块可以从根据步骤2移动的光路中获取第二帧图像。
[0724]
在根据步骤2的驱动倾斜致动器驱动序列之后,倾斜致动器可以根据步骤3倾斜光学构件(或滤光器)。由于根据步骤3进行倾斜,光学构件(或者滤光器)的左侧可以向上移动,其右侧可以相对于参考面向下移动。图65d示出了步骤3中输入光的光路。当光学构件(或滤光器)根据步骤3倾斜时,输入光的光路可以从参考光路向左移动0.25像素。在步骤2中,输入光的光路可以相对于输入光的光路向左移动0.25像素。然后,根据本发明其他实施例的相机模块可以从根据步骤3移动的光路中获取第三帧图像。
[0725]
按照步骤3的倾斜致动器的驱动序列之后,倾斜致动器可按照步骤4倾斜光学构件(或滤光器)。由于按照步骤4的倾斜,光学构件(或者滤光器)的下端可以向上移动,其上端可以相对于参考面向下移动。图65e示出了步骤4中输入光的光路。当光学构件(或滤光器)根据步骤4倾斜时,输入光的光路可以从参考光路向下移动0.25像素。在步骤2中,输入光的光路可以相对于输入光的光路向下移动0.25像素。然后,根据本发明其他实施例的相机模块可以从根据步骤4移动的光路中获取第四帧图像。图66是描述根据又一其他实施例的倾斜致动器的视图。
[0726]
图66a示出了倾斜致动器的第一线圈至第四线圈设置在基板3000上的形式。第一至第四线圈可以被设置在基板3000上,彼此间隔开一定距离。基板3000可以以这样的形式实施:基板3000可以在第一线圈与第二线圈之间、第二线圈与第三线圈之间以及第三线圈与第四线圈之间折叠。此外,电流i1到i4可以单独施加到第一线圈到第四线圈。
[0727]
此外,参考图56描述的内容可以以相同方式被应用于图66b和图66c,但以下所述内容除外。在下文中,用于控制x轴方向上的倾斜的第三输出信号x1和第四输出信号x2可以分别输入到第一线圈和第三线圈。用于控制y轴方向上的倾斜的第五输出信号y1和第六输出信号y2可以被输入到第二线圈和第四线圈。基于上述描述进行以下描述。
[0728]
图67是描述根据第三其他实施例的倾斜单元的驱动序列的视图。
[0729]
图67示出根据触发信号生成的第三输出信号至第六输出信号。第三输出信号和第四输出信号可以分别被输入到第一线圈和第三线圈,第五输出信号和第六输出信号可以分别被输入到第二线圈和第四线圈。
[0730]
如上所述,触发信号可以是方波信号,其中在规定的周期内产生脉冲。触发信号可以响应于上述传感器的传感器驱动(积分时间)的驱动而产生。此外,脉冲间隔,即触发信号的脉冲周期可以是一个帧间隔。此外,从触发信号的脉冲的上升沿到触发信号的下一脉冲的上升沿的间隔可以是一帧间隔。触发信号的脉冲宽度可以设置为小于一个帧间隔。
[0731]
此外,在倾斜致动器的驱动序列开始之前,即在默认状态下,第三输出信号到第六输出信号的电流电平可以为level 0。这里,level 0可以指0【a】的电流,但不限于此。
[0732]
当倾斜致动器的驱动序列开始时,基于触发信号脉冲的下降沿,在设定的延迟时间(delay t)之后,控制第三输出信号至第六输出信号的电流电平。第三输出信号到第六输出信号的电流电平可以为每个帧间隔被控制。第三输出信号至第六输出信号可以被控制为每个帧间隔具有高电平电流或低电平电流。高电平电流可以指电流值大于参考电平电流值的状态,低电平电流可以指电流值小于参考电平电流值的状态。例如,当参考电平设置为0【a】时,高电平可以指具有( )值的电流,而低电平可以指具有(-)值的电路。当输出信号的电流电平在连续步骤中不同时,可能需要预定时间来增加或减少电流电平。
[0733]
下表4是示出图67所示第三输出信号到第六输出信号的表。
[0734]
【表4】
[0735][0736]
在表4中,(-)表示低电平电流,( )表示高电平电流。低电平电流和高电平电流可以指具有相同幅度和不同方向的电流。此外,步骤1表示第一倾斜序列,步骤2表示第二倾斜序列,步骤3表示第三倾斜序列和步骤4表示第四倾斜序列。当倾斜致动器的驱动序列开始
时,第三输出信号至第六输出信号的电流电平可以在第一脉冲的下降沿经过设定的延迟时间之后被控制(步骤1)。第三输出信号可以被控制为从电流到低电平电流。第四输出信号可以被控制为高电平电流。第五输出信号可以被控制为高电平电流。第六输出信号可以被控制为低电平电流。
[0737]
第三输出信号至第六输出信号中的每个均可以包括第一信号sg1和第二信号sg2。此外,在第三输出信号至第六输出信号中,第二信号sg2可以在第一信号sg 1之后持续存在。可以以相同的方式应用于对第一信号和第二信号的描述。因此,根据其他实施例的倾斜致动器具有第一信号sg1和第二信号sg2,因此可以通过减少过冲和设置时间来容易地通过倾斜生成帧图像。
[0738]
在第二脉冲的下降沿经过设定的延迟时间之后,可以控制第三输出信号至第六输出信号的电流电平(步骤2)。第三输出信号可以被控制为从电流到高电平电流。第四输出信号可以被控制为低电平电流。第五输出信号可以被控制为高电平电流。第六输出信号可以被控制为低电平电流。
[0739]
如上所述,第三输出信号和第四输出信号可以具有从第二脉冲的下降沿经过设置的延迟时间之后的第一信号,并且具有在第一信号之后的高电平的第二信号。
[0740]
在第三脉冲的下降沿经过设定的延迟时间之后,可以控制第三输出信号至第六输出信号的电流电平(步骤3)。第三输出信号可以被控制从电流到高电平电流。第四输出信号可以被控制到低电平电流。第五输出信号可以被控制到低电平电流。第六输出信号可以被控制到高电平电流。
[0741]
此外,第五输出信号和第六输出信号可以具有从第三脉冲的下降沿经过设置的延迟时间之后的第一信号,并且具有在第一信号之后的低电平的第二信号。
[0742]
在第四脉冲的下降沿经过设定的延迟时间之后,可以控制第三输出信号到第六输出信号的电流电平(步骤4)。第三输出信号可以被控制从电流到低电平电流。第四输出信号可以被控制到高电平电流。第五输出信号可以被控制到低电平电流。第六输出信号可以被控制到高电平电流。
[0743]
第三输出信号和第四输出信号可以具有从第四脉冲的下降沿经过设置的延迟时间之后的第一信号,并且具有在第一信号之后的低电平的第二信号。
[0744]
步骤1至步骤4可以在一个循环中运行,并可以在倾斜致动器的驱动序列运行时连续重复。
[0745]
此外,在步骤1和步骤2中,由于第五输出信号和第六输出信号被保持为第一信号之后的第二信号(高电平或低电平),因此可以降低控制输出信号的能耗,并进一步降低驱动单元(第二和第四驱动单元)的振荡,从而可以更精确地倾斜滤光器。
[0746]
此外,在步骤2和步骤3中,由于第三输出信号和第四输出信号被保持为第一信号之后的第二信号(高电平或低电平),因此可以降低控制输出信号的能耗,并进一步降低驱动单元(第一和第三驱动单元)的振荡,从而可以更精确地倾斜滤光器。
[0747]
此外,在步骤3和步骤4中,由于第五输出信号和第六输出信号被保持为第一信号之后的第二信号(低电平),因此可以降低控制输出信号的能耗,进一步降低驱动单元(第二和第四驱动单元)的振荡,从而可以更精确地倾斜滤光器。
[0748]
此外,根据根据第三其他实施例的倾斜单元的驱动序列,根据第一其他实施例的
倾斜单元或相机模块中描述的光路移动过程的上述内容,对于sr技术所获得的多个图像,第一帧至第四帧的图像可以以相同的方式应用于其中。
[0749]
图68是描述根据第四其他实施例的倾斜单元的驱动序列的视图。
[0750]
图67示出根据触发信号生成的第三输出信号到第六输出信号。第三输出信号和第四输出信号可以分别被输入到第一线圈和第三线圈,第五输出信号和第六输出信号可以分别被输入到第二线圈和第四线圈。
[0751]
下表5是示出图67所示第三输出信号到第六输出信号的表。
[0752]
【表5】
[0753][0754]
在表5中,(-)表示低电平电流,( )表示高电平电流。低电平电流和高电平电流可以指具有相同幅度和不同方向的电流。此外,步骤1表示第一倾斜序列,步骤2表示第二倾斜序列,步骤3表示第三倾斜序列,和步骤4表示第四倾斜序列。当倾斜致动器的驱动序列开始时,第三输出信号至第六输出信号的电流电平可以在第一脉冲的下降沿经过设定的延迟时间之后被控制(步骤1)。第三输出信号可以被控制为从电流到高电平电流。第四输出信号可以被控制为低电平电流。第五输出信号可以被控制为参考电平电流。第六输出信号可以被控制为参考电平电流。
[0755]
第三输出信号和第四输出信号中的每个均可以包括第一信号sg1和第二信号sg2。此外,在第三输出信号和第四输出信号中,第二信号sg2可以在第一信号sg1之后持续存在。可以以相同的方式应用于对第一信号和第二信号的描述。因此,根据其他实施例的倾斜致动器具有第一信号sg1和第二信号sg2,因此可以通过减少过冲和设置时间来容易地通过倾斜生成帧图像。
[0756]
在第二脉冲的下降沿经过设定的延迟时间之后,可以控制第三输出信号到第六输出信号的电流电平(步骤2)。第三输出信号可以被控制为从电流到参考电平电流。第四输出信号可以被控制为参考电平电流。第五输出信号可以被控制为高电平电流。第六输出信号可以被控制为低电平电流。
[0757]
如上所述,第五输出信号和第六输出信号可以具有从第二脉冲的下降沿经过设置的延迟时间之后的第一信号,并且具有在第一信号之后的高电平的第二信号。
[0758]
在第三脉冲的下降沿经过设定的延迟时间之后,可以控制第三输出信号至第六输出信号的电流电平(步骤3)。第三输出信号可以被控制从电流到低电平电流。第四输出信号可以被控制到高电平电流。第五输出信号可以被控制到参考电平电流。第六输出信号可以被控制到参考电平电流。
[0759]
此外,第三输出信号和第四输出信号可以具有从第三脉冲的下降沿经过设置的延迟时间之后的第一信号,并且具有在第一信号之后的低电平的第二信号。
[0760]
在第四脉冲的下降沿经过设定的延迟时间之后,可以控制第三输出信号至第六输出信号的电流电平(步骤4)。第三输出信号可以被控制从电流到参考电平电流。第四输出信号可以被控制到参考电平电流。第五输出信号可以被控制到低电平电流。第六输出信号可以被控制到高电平电流。
[0761]
第五输出信号和第六输出信号可以具有从第四脉冲的下降沿经过设置的延迟时间之后的第一信号,并且具有在第一信号之后的低电平的第二信号。
[0762]
步骤1至步骤4可以在一个循环中运行,并可以在倾斜致动器的驱动序列运行时连续重复。
[0763]
此外,根据根据第三其他实施例的倾斜单元的驱动序列,根据第一其他实施例的倾斜单元或相机模块中描述的光路移动过程的上述内容,对于sr技术所获得的多个图像,第一帧至第四帧的图像可以以相同的方式应用于其中。此外,上述内容也可以同样的方式应用于其他内容。
[0764]
图69是描述根据修改的实施例的倾斜单元的驱动序列的视图。
[0765]
参考图69,如上所述,第一输出信号和第二输出信号可以包括第一信号sg1和第二信号sg2。作为修改示例,第一输出信号和第二输出信号可以在第二信号sg2之后还包括连续的第三信号sg3。此时,在一个帧间隔内,在第二信号sg2之后,第三信号sg3可以是连续的。
[0766]
在根据修改示例的倾斜单元中,由于倾斜致动器在将滤光器倾斜至所需角度之后接收第三信号sg3,倾斜制动器可以返回到空档序列状态。因此,即使当倾斜致动器在下一步骤中接收第一信号sg1和第二信号sg2,每个驱动单元的线圈中的电流值可能在施加第一信号sg1之前立即接近0。通过这种配置,可以消除线圈中剩余的电流,从而消除初始电流引起的振荡。换句话说,当倾斜致动器被驱动时,可以减少振荡。
[0767]
图70是示出包括根据实施例的相机模块的光学设备的视图。
[0768]
参考图70,根据该实施例的光学设备包括前外壳fc、后外壳rc和相机模块10,该相机模块被设置在前外壳fc和后外壳rc之中或之间。
[0769]
此外,相机模块10可以是上述实施例或其他实施例的相机模块。因此,光学设备可以通过被配置为输出三维深度图像的相机模块10来捕获深度图像。
[0770]
尽管以上主要描述了实施例,但这仅仅是说明性的,并不限制本发明,本发明所属领域的技术人员将能够理解,在不脱离实施例的基本特征的情况下,上述未举例说明的各种修改和应用是可能的。例如,本实施例中具体显示的每个部件都可以通过修改来实现。此外,与修改和应用相关的差异应被解释为包括在所附权利要求所定义的本发明的范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。