1.本发明涉及智能网联车辆的轨迹规划与通行次序求解的技术领域,尤其是涉及一种智能车辆交叉口通行排序与轨迹规划计算量降低方法。
背景技术:
2.随着通信技术和控制技术的进一步发展,智能网联车辆将逐渐普及,其被认为是解决交通拥堵、交通安全的新兴解决方案。在v2x背景下,智能网联车辆的通行次序和行驶轨迹将由交叉口内部的中央控制器集中调度,但随着交叉口内部的智能网联车辆数量增加,中央控制器的计算负担快速增大,因此需要一种求解智能网联车辆通行次序和轨迹规划的高效方法。
3.现有技术中,通行次序和轨迹规划的控制对象均为智能网联车辆单车,当交叉口内部的智能网联车辆数量达到一定阈值时,合理的通行次序求解方法将解得智能网联车辆组队通过交叉口的方案,辅以单车轨迹规划方法可使得智能网联车辆组队通过交叉口;然而,现有通行次序求解方法和轨迹规划方法均单独控制每辆智能网联车辆,计算复杂度随着车辆数量的增多而迅速增加。
技术实现要素:
4.本发明要解决的技术问题在于,提供一种智能车辆交叉口通行排序与轨迹规划计算量降低方法,其以车队为控制对象进行智能网联车辆的通行次序求解和轨迹规划,降低了中央控制器的计算负担。
5.本发明解决其技术问题所采用的技术方案是:提供一种智能车辆交叉口通行排序与轨迹规划计算量降低方法,包括以下步骤:
6.s1、智能网联车辆vi到达交叉口控制区时,判断是否有其它智能网联车队驶出交叉口冲突区,若有则将其移出冲突车队集p
cf
;
7.s2、将vi视为队长为1的智能网联车队,将vi移入冲突车队集p
cf
,形成未组队冲突车队集p
cf_up
,采用启发式算法计算未组队冲突车队集p
cf_up
中各个车队间最优的通行次序d
up
及未组队车均延误d
up
;
8.s3、能否在交叉口控制区范围汇入其所在路径的前方车队,若能则更新前方车队的信息,更新冲突车队集p
cf
,形成组队冲突车队集p
cf_p
,采用启发式算法计算组队冲突车队集p
cf_p
中各个车队间最优的通行次序d
p
及其组队车均延误d
p
;
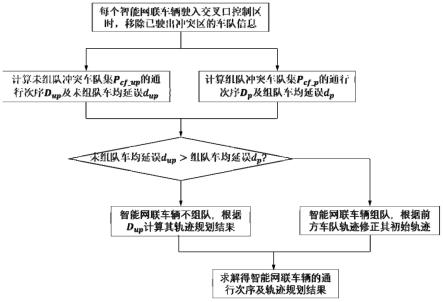
9.s4、根据未组队车均延误d
up
和组队车均延误d
p
的数值比较结果确定智能网联车辆vi的组队策略;
10.s5、每个智能网联车辆到达交叉口控制区时,执行步骤s1-s4,实现交叉口智能网联车辆通行次序与轨迹规划的动态更新。
11.按上述方案,所述步骤s1包括以下步骤:
12.s101、获取智能网联车辆vi到达交叉口控制区的时刻,所述交叉口控制区为四个
进口道的警示线与信号传输边界围合的区域;
13.s102、判断上一辆智能网联车辆v
i-1
和当前智能网联车辆vi到达控制区的时间范围内,是否有智能网联车队驶出冲突区,其中冲突区是四个进口道的警示线围合区域;
14.t
a,i-1
≤td≤t
a,i
15.式中,t
a,i-1
表示上一辆智能网联车辆v
i-1
到达控制区的时刻,t
a,i
表示当前智能网联车辆vi到达控制区的时刻,td表示t
a,i-1
和t
a,i
时间范围内智能网联车队驶出交叉口冲突区的时刻集合;
16.s103、若步骤s102中的集合td为空集,则表示t
a,i-1
和t
a,i
时间范围内不存在驶离交叉口冲突区的车队;
17.s104、若步骤s102中的集合td非空,则需按下式将td中的对应车队pd移出冲突车辆集p
cf
:
[0018][0019]
按上述方案,所述步骤s2包括以下步骤:
[0020]
s201、将智能网联车辆vi视为队长为1的智能网联车队pi,形成未组队冲突车队集p
cf_up
:
[0021]
p
cf_up
=p
cf
∪pi[0022]
s202、建立最小车均延误模型,目标函数具体表达式如下:
[0023][0024]
式中,o
m,n
表示未组队冲突车队集p
cf_up
中第m个车队pm与第n个车队pn的通行次序,取1表示pm优先通行,取0表示pn中第m个车辆优先通行;d
up
表示未组队冲突车队集p
cf_up
的车均延误;表示车队pm的车辆总延误;表示车队pm的队长(包含车辆数);m表示未组队冲突车队集p
cf_up
的车队总数;
[0025]
s203、采用启发式算法求解步骤s202中的最小车均延误模型,将求解结果o
m,n
存入未组队最优通行次序d
up
。
[0026]
按上述方案,所述步骤s3包括以下步骤:
[0027]
s301、获取智能网联车辆vi所在路径;
[0028]
s302、判断智能网联车辆vi所在路径是否有未驶出控制区的车队,若有则判断智能网联车辆vi以最大速度匀速行驶能否在控制区范围内汇入前方车队;
[0029]
s303、若不能汇入前方车队,或前方无车队,则步骤s3结束,组队车均延误d
p
取无穷大;
[0030]
s304、若能汇入前方车队则按下式更新前方车队的信息:
[0031][0032][0033]
式中,表示前方车队pf的队长(所包含车辆数);表示前方车队pf的车队实际长度,li表示智能网联车辆vi的车辆实际长度,δ表示最小安全间距;
[0034]
s305、更新原冲突车辆集p
cf
中车队pf的车队信息,形成组队车队冲突集p
cf_p
;
[0035]
s306、建立最小车均延误模型,目标函数具体表达式如下:
[0036][0037]
式中,o
m,n
表示组队冲突车队集p
cf_p
中第m个车队pm与第n个车队pn的通行次序,取1表示pm优先通行,取0表示pn中第m个车辆优先通行;d
p
表示组队冲突车队集p
cf_p
的车均延误;表示车队pm的车辆总延误;表示车队pm的队长(包含车辆数);m表示组队冲突车队集p
cf_p
的车队总数;
[0038]
s307、采用启发式算法求解步骤s306中的最小车均延误模型,将求解结果o
m,n
存入组队最优通行次序d
p
。
[0039]
按上述方案,所述步骤s4中:若智能网联车辆vi不与前方车队组队,则并根据步骤s2的最优通行次序为其进行轨迹规划;若智能网联车辆vi与前方车队组队,则需引入校正模型修正以最大速度匀速行驶的初始轨迹,以使智能网联车辆vi顺利汇入前方车队。
[0040]
按上述方案,所述步骤s4包括以下步骤:
[0041]
s401、若未组队车均延误d
up
小于组队车均延误d
p
,则智能网联车辆vi与前方车队组队,否则能网联车辆vi不与前方车队组队;
[0042]
s402、获取智能网联车辆vi到达控制区边界的时刻、速度、加速度、加速度变化率等当前行驶信息,并确定其初始条件x0:t=t0,s0=(u0,a0,v0,x0);
[0043]
式中,式中,t0表示初始时刻,s0表示初始状态,u0表示初始加速度变化率,a0表示初始加速度,v0表示初始速度,x0表示初始位置;
[0044]
s403、若智能网联车辆vi不与前方车队组队,则根据步骤s2的未组队最优通行次序d
up
计算其警示线预定到达时刻、速度、加速度、加速度变化率等待执行行驶信息,并确定其终止条件xf:t=tf,sf=(uf,af,vf,xf);
[0045]
式中,tf表示终止时刻,sf表示终止状态,uf表示终止加速度变化率,af表示终止加速度,vf表示终止速度,xf表示终止位置;
[0046]
s404、建立智能网联车辆vi在初始条件和终止条件之间的最优控制模型,具体表达式如下:
[0047]
目标函数:
[0048][0049]
约束条件:
[0050][0051]umin
≤u(t)≤u
max
[0052]amin
≤a(t)≤a
max
[0053]vmin
≤v(t)≤v
max
[0054]
式中,目标函数保证车辆行驶过程中乘客舒适度最高,约束条件保证车辆行驶过程中满足系统动力学方程和车辆性能约束,其中,u(t)表示加速度变化率关于时间的函数,a(t)表示加速度关于时间的函数,v(t)表示速度关于时间的函数,x(t)表示位移关于时间的函数,u
min
、u
max
分别表示加速度变化率的下限和上限,a
min
、a
max
分别表示加速度的下限和上限,v
min
、v
max
分别表示速度的下限和上限;
[0055]
s405、求解步骤s404中的最优控制模型,得到智能网联车辆vi不与前方车队组队的轨迹规划结果;
[0056]
s406、若智能网联车辆vi与前方车队组队,则求解其在初始时刻t=t0之后始终以最大速度匀速行驶的初始轨迹;
[0057]
s407、提取步骤s406求得的智能网联车辆vi的初始轨迹与前方车队最优轨迹的首次相交时刻t
fc_1
,智能网联车辆vi轨迹规划的分段时刻按下式计算:
[0058]
t
fc
=max(t
fc_1
,t0 t
fcmin
)
[0059]
式中,t
fc
表示智能网联车辆vi轨迹规划的分段时刻,t0表示智能网联车辆vi的初始时刻,t
fcmin
表示智能网联车辆vi与前方车队组队的最短用时;
[0060]
s408、根据前方车队在分段时刻t
fc
的状态计算智能网联车辆vi的分段状态:
[0061][0062]
式中,s
fc
表示智能网联车辆vi的分段状态,u
fc
表示前方车队的分段加速度变化率,a
fc
表示前方车队的分段加速度,v
fc
表示前方车队的分段速度,x
fc
表示前方车队的分段首车位置,表示前方车队的实际车队长度,δ表示最小安全间距;
[0063]
s409、使用步骤s404—s405计算智能网联车辆vi在初始条件x0:t=t0,s0=(u0,a0,v0,x0)和分段条件x
fc
:t=t
fc
,之间的轨迹,智能网联车辆vi在分段时刻t
fc
之后的速度、加速度、加速度变化率与前方车队的最优轨迹保持一致,智能网联车辆vi在分段时刻t
fc
之后的位置与前方车队的首车位置满足以下条件:
[0064][0065]
式中,xi表示智能网联车辆vi的位置,表示前方车队首车的位置,表示前方车队的实际车队长度,δ表示最小安全间距。
[0066]
实施本发明的智能车辆交叉口通行排序与轨迹规划计算量降低方法,具有以下有益效果:
[0067]
本发明通过将智能网联车辆的组队策略作为决策变量,使得智能网联车辆的组队行为得以提前求解,进而以车队为控制对象进行通行次序求解和轨迹规划,降低了中央控制器求解智能网联车辆通行次序和轨迹规划的计算负担。
附图说明
[0068]
图1为智能车辆交叉口通行排序与轨迹规划计算量降低方法的流程图;
[0069]
图2为交叉口控制区与冲突区的分布位置的示意图;
[0070]
图3为交叉口路径分布的示意图;
[0071]
图4为未组队通行次序求解控制对象的示意图;
[0072]
图5为组队通行次序求解控制对象的示意图。
具体实施方式
[0073]
为了对本发明的技术特征、目的和效果有更加清楚的理解,现对照附图详细说明本发明的具体实施方式。
[0074]
如图1-5所示,本发明智能车辆交叉口通行排序与轨迹规划计算量降低方法,包括以下步骤:
[0075]
s1、智能网联车辆vi到达交叉口控制区时,判断是否有其它智能网联车队驶出交叉口冲突区,若有则将其移出冲突车队集p
cf
;
[0076]
s101、获取智能网联车辆vi到达交叉口控制区的时刻;
[0077]
s102、判断上一辆智能网联车辆v
i-1
和当前智能网联车辆vi到达控制区的时间范围内,是否有智能网联车队驶出冲突区:
[0078]
t
a,i-1
≤td≤t
a,i
[0079]
式中,t
a,i-1
表示上一辆智能网联车辆v
i-1
到达控制区的时刻,t
a,i
表示当前智能网联车辆vi到达控制区的时刻,td表示t
a,i-1
和t
a,i
时间范围内智能网联车队驶出交叉口冲突区的时刻集合;
[0080]
s103、若步骤s102中的集合td为空集,则表示t
a,i-1
和t
a,i
时间范围内不存在驶离交叉口冲突区的车队;
[0081]
s104、若步骤s102中的集合td非空,则需按下式将td中的对应车队pd移出冲突车辆集p
cf
:
[0082][0083]
本实施例中,智能网联车辆v
10
到达交叉口控制区的时刻为20s,上一辆智能网联车辆v9到达控制区的时刻为19s在v9和v
10
到达控制区的时间范围内,无车队驶出交叉口冲突区。
[0084]
s2、将vi视为队长为1的智能网联车队,将vi移入冲突车队集p
cf
,形成未组队冲突车队集p
cf_up
,采用启发式算法计算未组队冲突车队集p
cf_up
中各个车队间最优的通行次序d
up
及未组队车均延误d
up
;
[0085]
s201、将智能网联车辆v
10
视为队长为1的智能网联车队p
10
,形成未组队冲突车队集p
cf_up
:
[0086]
p
cf_up
=p
cf
∪pi[0087]
s202、建立最小车均延误模型,目标函数具体表达式如下:
[0088][0089]
式中,o
m,n
表示未组队冲突车队集p
cf_up
中第m个车队pm与第n个车队pn的通行次序,取1表示pm优先通行,取0表示pn中第m个车辆优先通行;d
up
表示未组队冲突车队集p
cf_up
的车均延误;表示车队pm的车辆总延误;表示车队pm的队长(包含车辆数);m表示未组队冲突车队集p
cf_up
的车队总数;
[0090]
s203、采用启发式算法求解步骤s202中的最小车均延误模型,将求解结果o
m,n
存入
未组队最优通行次序d
up
;
[0091]
本实施例中,原冲突车队集p
cf
共有3个车队,将v
10
加入后形成的未组队冲突车队集p
cf_up
共含有4个车队,未组队冲突车队集p
cf_up
的最小车均延误d
up
=14.8s;
[0092]
s3、获取智能网联车辆vi所在路径,判断智能网联车辆vi以最大速度匀速行驶能否在交叉口控制区范围汇入其所在路径的前方车队,若能则更新前方车队的信息,更新冲突车队集p
cf
,形成组队冲突车队集p
cf_p
,采用启发式算法计算组队冲突车队集p
cf_p
中各个车队间最优的通行次序d
p
及其组队车均延误d
p
;
[0093]
s301、获取智能网联车辆vi所在路径;
[0094]
本实施例中,v
10
所在路径编号为1;
[0095]
s302、判断智能网联车辆vi所在路径是否有未驶出控制区的车队,若有则判断智能网联车辆以最大速度匀速行驶能否在控制区范围内汇入前方车队;
[0096]
s303、若不能汇入前方车队,或前vi方无车队,则步骤s3结束,组队车均延误d
p
取无穷大;
[0097]
本实施例中,v
10
所在路径有未驶出控制区的车队,且v
10
可以汇入前方车队;
[0098]
s304、若能汇入前方车队则按下式更新前方车队的信息:
[0099][0100][0101]
式中,表示前方车队pf的队长(所包含车辆数);表示前方车队pf的车队实际长度,li表示智能网联车辆vi的车辆实际长度,δ表示最小安全间距;
[0102]
本实施例中,v
10
的车辆实际长度为3.75m,最小安全间距取1.5m,前方车队pf的队长由1更新为2,前方车队pf的车队实际长度由3.75m更新为9m;
[0103]
s305、更新原冲突车辆集p
cf
中车队pf的车队信息,形成组队车队冲突集p
cf_p
;
[0104]
本实施例中,更新原冲突车辆集p
cf
中v
10
所在车队pf的队长和车队实际长度;
[0105]
s306、建立最小车均延误模型,目标函数具体表达式如下:
[0106][0107]
式中,o
m,n
表示组队冲突车队集p
cf_p
中第m个车队pm与第n个车队pn的通行次序,取1表示pm优先通行,取0表示pn中第m个车辆优先通行;d
p
表示组队冲突车队集p
cf_p
的车均延误;表示车队pm的车辆总延误;表示车队pm的队长(包含车辆数);m表示组队冲突车队集p
cf_p
的车队总数;
[0108]
s307、采用启发式算法求解步骤s306中的最小车均延误模型,将求解结果o
m,n
存入组队最优通行次序d
p
;
[0109]
本实施例中,冲突车队集p
cf_p
中共含有3个车队,组队冲突车队集p
cf_p
的最小车均延误d
p
=11.3s;
[0110]
s4、根据未组队车均延误d
up
和组队车均延误d
p
的数值比较结果确定智能网联车辆vi的组队策略;若智能网联车辆vi不与前方车队组队,则并根据步骤s2的最优通行次序为其
进行轨迹规划;若智能网联车辆vi与前方车队组队,则需引入校正模型修正以最大速度匀速行驶的初始轨迹,以使智能网联车辆vi顺利汇入前方车队;
[0111]
s401、若未组队车均延误d
up
小于组队车均延误d
p
,则智能网联车辆v
10
与前方车队组队,否则智能网联车辆v
10
不与前方车队组队;
[0112]
本实施例中,未组队车均延误d
up
=14.8s》组队车均延误d
p
=11.3s,智能网联车辆v
10
与前方车队组队;
[0113]
s402、获取智能网联车辆v
10
到达控制区边界的时刻、速度、加速度、加速度变化率等当前行驶信息,并确定其初始条件x0:t=20,s0=(0,0,14,0);
[0114]
s403、若智能网联车辆v
10
不与前方车队组队,则根据步骤s2的未组队最优通行次序d
up
计算其警示线预定到达时刻、速度、加速度、加速度变化率等待执行行驶信息,并确定其终止条件xf:t=tf,sf=(uf,af,vf,xf);
[0115]
式中,tf表示终止时刻,sf表示终止状态,uf表示终止加速度变化率,af表示终止加速度,vf表示终止速度,xf表示终止位置;
[0116]
s404:建立智能网联车辆v
10
在初始条件和终止条件之间的最优控制模型,具体表达式如下:
[0117]
目标函数:
[0118][0119]
约束条件:
[0120][0121]umin
≤u(t)≤u
max
[0122]amin
≤a(t)≤a
max
[0123]vmin
≤v(t)≤v
max
[0124]
式中,目标函数保证车辆行驶过程中乘客舒适度最高,约束条件保证车辆行驶过程中满足系统动力学方程和车辆性能约束。其中,u(t)表示加速度变化率关于时间的函数,a(t)表示加速度关于时间的函数,v(t)表示速度关于时间的函数,x(t)表示位移关于时间的函数,u
min
、u
max
分别表示加速度变化率的下限和上限,a
min
、a
max
分别表示加速度的下限和上限,v
min
、v
max
分别表示速度的下限和上限。
[0125]
s405、求解步骤s404中的最优控制模型,得到智能网联车辆v
10
不与前方车队组队的轨迹规划结果;
[0126]
本实施例中,智能网联车辆v
10
与前方车队组队,则跳过步骤s403—s405;
[0127]
s406、若智能网联车辆v
10
与前方车队组队,则求解其在初始时刻t=20之后始终以最大速度匀速行驶的初始轨迹;
[0128]
s407、提取步骤s406求得的智能网联车辆v
10
的初始轨迹与前方车队最优轨迹的首次相交时刻t
fc_1
=25,智能网联车辆v
10
轨迹规划的分段时刻按下式计算:
[0129]
t
fc
=max(25,20 12)=32
[0130]
s408:根据前方车队在分段时刻t
fc
的状态计算智能网联车辆vi的分段状态:
[0131]sfc
=(0,0,0,92-3.75-1.5)=(0,0,0,86.75)
[0132]
s409:使用步骤s404—s405计算智能网联车辆v
10
在初始条件x0:t=20,s0=(0,0,14,0)和分段条件x
fc
:t=32,s
fc
=(0,0,0,86.75)之间的轨迹,智能网联车辆v
10
在分段时刻t
fc
=32之后的速度、加速度、加速度变化率与前方车队的最优轨迹保持一致,智能网联车辆v
10
在分段时刻t
fc
之后的位置与前方车队的首车位置满足以下条件:
[0133][0134]
上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。