1.本发明涉及航路场景生成方法,特别涉及一种基于p-中值定理的航路飞行时间场景生成方法。
背景技术:
2.随着区域化经济的不断加强,机场之间的联合作用也越来越明显。一些地理位置相近的机场之间形成了机场群。十几年来,机场群中不同机场之间的制约和依赖变得更加突出,这些冲突主要体现在不同机场共享的进离场点和进离场航路之间。在进行机场群的航班时刻配置时,限制航路点容流平衡是机场之间协同优化的重点。然而,航路点的流量并不能直接得到,需要根据机场的航班时刻表和机场到航路点的飞行时间推算得到。而对于机场群内的机场和航路点,它们之间的飞行时间存在不确定性,主要基于以下原因:1)天气原因,2)军方活动,以及3)流量控制等。在不同因素的综合作用下,航路飞行被分为不同场景,每种场景对应的飞行时间不同。
3.不同的航路飞行时间场景,对应不同的航路飞行时间,进而导致了不同的航路点流量,而战术层面上实际发生的场景并不能在战术层面上被确定。因此,使用正确的方法生成合适的场景以及得到相应的发生概率,对战略航班时刻的配置、提高航班时刻表的稳定性具有重要意义。
技术实现要素:
4.发明目的:本发明目的是提供一种基于p-中值定理的机场群航路飞行时间场景生成方法。
5.技术方案:本发明所述的基于p-中值定理的机场群航路飞行时间场景生成方法,包括如下步骤:
6.步骤1,对于给定航路点和机场,收集历史航班运行数据和雷达轨迹数据,得出机场到航路点每一次的航路飞行时间;
7.步骤2,对已收集到的数据集进行处理,剔除异常值,并进行离散化,得到飞行时间集合;p
′i8.步骤3,判断飞行时间集合中数据种类的个数,选择场景生成模型或场景补充得到给定场景个数下的生成的场景;
9.步骤4,根据模型求解的结果得到各个场景对应的航路飞行时间和发生概率。
10.优选的,所述步骤1的具体过程为:
11.步骤11:通过历史运行数据,得到每个航班的进/离场时间;
12.步骤12:通过历史雷达轨迹数据,得到每个航班到达航路点的时间;
13.步骤13:筛选同时经过给定机场和航路点的航班,分别对他们的进/离场时间和过点时间作差,得到每天所有航班的飞行时间数据。
14.优选的,所述步骤2的具体过程为:
15.步骤21:分析飞行时间的频率分布,设定阈值为q3 2
·
(q
3-q1),其中q3和q1分别为数据的第3个4分位数和第1个4分位数;
16.步骤22:剔除原始数据中阈值以外数据;
17.步骤23:以1分钟为单位,对飞行时间进行离散化,得到飞行时间集合。
18.优选的,所述步骤3的具体过程为:
19.步骤31:判断飞行时间集合中数据的种类个数s
′
,即集合中飞行时间有几种不同的取值,若个数s
′
≥s,则进行场景生成模型,否则进程场景补充;
20.步骤32:建立场景生成模型,场景生成模型是一个混合整数规划模型,使用康托洛维奇距离来衡量场景生成前后飞行时间概率分布之间的距离,求解2个概率分布之间的康托洛维奇距离可以表述为如下的线性规划模型:
[0021][0022][0023]
d表示2个概率分布之间的康托洛维奇距离,表示原场景集中飞行时间为i分钟出现的概率,pj表示生成的场景集中飞行时间为j分钟出现的概率;模型中的决策变量为它是一个连续变量,表示i到j之间转移的概率的数量;c
ij
表示单位数量概率转移的代价;
[0024]
步骤33:将历史数据中每一次航路飞行时间都视为场景集中的一个数据点,我们把原始飞行时间集合记为表示原飞行时间集合中元素的数量;中包含了每一次航路飞行的飞行时间{τ
′1,τ
′2,...,τ
′n},分别对应其发生概率{p
′1,p
′2,...,p
′n},索引集合记为n,n={1,2,...,n},每一次发生的概率相等,则生成的飞行时间集合记为包含的元素个数为s,其发生概率分别为{p
′1,p
′2,...,p
′s};将原飞行时间集合中每次的飞行时间都视为一个取值,而不是把相同的飞行时间进行加和来统计发生概率,那么原集合中飞行时间概率分布可以看作平均分布,每次飞行时间发生的概率都相等,而且不可再分,此时最小化康托洛维奇距离可以转化为一个求解p-中值模型的问题。在p-中值模型中,生成飞行时间集合中τ1,τ2,...,τn可以视为设施,原飞行时间集合中τ
′1,τ
′2,...,τ
′n可以视为需求点;
[0025]
步骤34:将p-中值模型用公式表示,设置决策变量为λs′s和γs为0-1变量,s,s
′
∈n;λs′s=1表示原场景集中τs′
被映射到生成场景集中的τs;γs=1表示原场景集中的τ
′s被选为生成场景集中的场景;则目标函数为:
[0026]
[0027]ds
′s表示2个场景之间的距离,即飞行时间的差值,其计算方式为:
[0028]ds
′s=|τs′-τs|,s,s
′
∈n
[0029]
限制生成场景集中场景数为s:
[0030][0031]
限制生成场景集中的每个场景不同:
[0032]
|τ
i-τj|≥γi·
γj,i,j∈n
[0033]
原场景集中的场景只能被映射到新场景集中的一个场景:
[0034][0035]
原场景集中场景的映射目标必须被选中成为生成场景集中的元素:
[0036][0037]
在以上约束和目标函数下求解模型;
[0038]
步骤35:若飞行时间集合中数据的种类个数不足s,则补充若干出现概率为0的场景直到达到所需场景数。
[0039]
优选的,所述步骤4具体过程为:
[0040]
步骤41:若s
′
≥s,则生成的场景集中飞行时间分别为其对应的概率计算公式为:
[0041][0042]
步骤42:若s
′
<s,则生成的场景集中飞行时间分别为原场景集中的飞行时间,对应概率为在原场景集中出现的频率;和(s-s
′
)个m(这里m是一个很大的正数),对应的概率为0。
[0043]
有益效果:机场群内机场到航路点的飞行时间存在不确定性,在战略层面的航路点流量计算中,需要考虑到这一不确定性,从而提高航班时刻表的鲁棒性,减少运行时的航班延误,解决不确定性最常见的方法就是随机规划,而随机规划的求解又依赖于场景生成。本发明解决了航路场景生成过程,不但将飞行时间进行离散化,还给出了给定场景数下的各个场景对应的航路飞行时间以及相应的发生概率,这对后续不确定性建模和随机规划的求解提供了基础;另外,场景生成过程可以对场景数进行缩减,得到发生概率较大的几个场景,从而忽略对极少数异常情况的考量,这种取舍可以大大简化模型的求解过程,保证在现有的计算能力下得到最优的解决方案。
附图说明
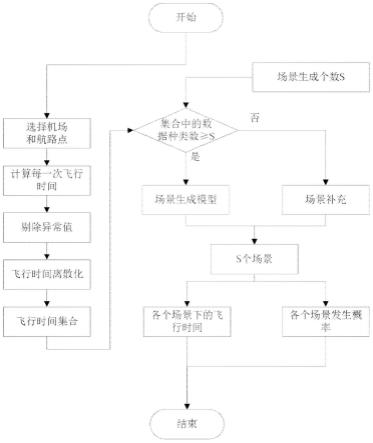
[0044]
图1是本发明方法的流程图;
[0045]
图2是实施例中机场到航路点的飞行时间分布箱线图。
具体实施方式
[0046]
本实施例将本发明方法应用于粤港澳大湾区机场群,包括5个机场:广州白云国际机场(zggg)、深圳宝安国际机场(zgsz)、珠海金湾国际机场(zgsd)、澳门国际机场(vmmc)和惠州平潭机场(zghz)5个机场。我们选择机场群内5个机场共用的进场点gya作为研究对象,分别对5个机场到gya的航路飞行时间进行场景生成。本实施例中针对zggg、zgsd、zgsz、zghz、vmmc5个机场以及gya航路点进行航路飞行时间场景生成。如图1所示,一种基基于p-中值定理的机场群航路飞行时间场景生成方法,包括如下步骤:
[0047]
步骤1,对于zggg、zgsd、zgsz、zghz、vmmc 5个机场和gya航路点,收集历史航班运行数据和雷达轨迹数据,由2019年12月的历史航班运行和雷达轨迹数据得出机场到航路点每一次的航路飞行时间;
[0048]
步骤11:通过历史运行数据,得到每个航班的进/离场时间;
[0049]
步骤12:通过历史雷达轨迹数据,得到每个航班到达航路点的时间;
[0050]
步骤13:筛选同时经过给定机场和航路点的航班,分别对他们的进/离场时间和过点时间作差,得到每天所有航班的飞行时间数据。
[0051]
步骤2,对已收集到的数据集进行处理,剔除异常值,并进行离散化,得到飞行时间集合;
[0052]
步骤21:分析飞行时间的频率分布,设定阈值为q3 2
·
(q
3-q1),其中q3和q1分别为数据的第3个4分位数和第1个4分位数;
[0053]
步骤22:剔除原始数据中阈值以外数据;
[0054]
步骤23:以1分钟为单位,对飞行时间进行离散化,得到飞行时间集合,每个机场到gya的飞行时间分布箱线图如图2所示。
[0055]
步骤3,判断飞行时间集合中数据种类的个数,选择场景生成模型或场景补充得到给定场景个数下的生成的场景;
[0056]
步骤31:设定s=2,判断飞行时间集合中数据的种类个数s
′
,即集合中飞行时间有几种不同的取值,若个数s
′
≥s,则进行场景生成模型,否则进程场景补充,经过判断5个机场到gya的飞行时间集合中数据的种类数均满足:s
′
≥s,可以进行场景生成;
[0057]
步骤32:建立场景生成模型,场景生成模型是一个混合整数规划模型,我们使用康托洛维奇距离来衡量场景生成前后飞行时间概率分布之间的距离;
[0058]
步骤33:将历史数据中每一次航路飞行时间都视为场景集中的一个数据点,把最小化康托洛维奇距离转化成一个p-中值模型;
[0059]
步骤34:将p-中值模型用公式表示,把zggg、zgsd、zgsz、zghz、vmmc5个机场到gya航路点飞行时间集合带入模型中进行求解;
[0060]
步骤4,根据模型求解的结果得到各个场景对应的航路飞行时间和发生概率。
[0061]
经过判断5个机场到gya的飞行时间集合中数据的种类数均满足:s
′
≥s,则生成的场景集中飞行时间分别为其对应的概率计算公式为:
[0062]
[0063]
生成的场景对应的飞行时间和出现的概率如表1所示
[0064]
表1
[0065]
机场航路点飞行时间1/分钟概率1飞行时间2/分钟概率2zggggya160.779240.221zgsdgya210.706280.224zgszgya220.549250.451zghzgya240.604260.396vmmcgya240.460270.540
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。