1.本发明涉及一种仅基于角度指令的舵片择时展开微型舵系统,属于微型导弹伺服舵机技术领域。
背景技术:
2.在微型导弹等精确制导武器中,伺服舵系统是其重要的飞行姿态和轨迹的操控装置。舵片作为微型导弹的气动控制部件,是导弹伺服系统的重要组成部分。导弹舵系统作为一种输出角度偏转运动的伺服驱动器,能够接收微型导弹发出的舵偏角指令,克服舵片的铰链力矩并快速实现角度位置跟踪偏转。根据当前微型导弹箱(筒)式发射、狭小空间限制和便携运输的一系列需求,往往采用折叠式舵片形式,使舵片可以按控制要求保持折叠,一旦接收展开动作指令,可自动展开并保持锁定。
3.然而目前现有的折叠舵片式伺服舵系统,大多存在以下缺点:(1)舵片展开动作需要单独的驱动部件和动作指令,不仅大大增加了舵系统的体积和重量,满足不了微型导弹小型化和一体化要求,而且使控制方式更加复杂,满足不了舵片展开和偏转动作精准可控的要求;(2)舵片展开动作一般在导弹出箱(筒)时刻触发,存在很高的发射过载,不能在后续飞行中完成,动作时机无法人为选择控制,对导弹伺服舵机系统的稳定性和抗过载能力提出了更高的要求;(3)舵片展开和舵片偏转动作剥离,在舵片展开到位后才能实施舵片偏转,无形增加了导弹伺服舵系统在飞行控制中的无效时间,对舵片展开和舵片偏转双动作同时进行提出了进一步需求。
技术实现要素:
4.本发明的技术解决问题是:为克服现有技术的不足,提供一种仅基于角度指令的舵片择时展开微型舵系统,以实现舵片展开动作全部基于角度指令下的舵角偏转,无需单独用于舵片展开的驱动单元和动作指令,体积紧凑、质量轻巧;系统可根据需要,在飞行阶段选择不同时机发送角度指令,完成舵片择时展开动作,并可达到较高的舵控精度;舵片展开和舵片偏转双动作同时进行,优化了导弹的飞行控制效果;整体装置拆装方便、结构稳定、可承受发射高过载工况。
5.本发明的技术解决方案是:
6.一种仅基于角度指令的舵片择时展开微型舵系统,包括舵角偏转驱动单元、位置反馈单元、转向减速传动单元、舵片择时展开单元、控制器、支撑座体;
7.支撑座体为空心柱状结构,控制器安装在支撑座体下方;四个舵角偏转驱动单元安装在支撑座体内部,且四个舵角偏转驱动单元沿支撑座体轴线对称布置;四个转向减速传动单元安装在支撑座体顶面上,且四个转向减速传动单元沿支撑座体轴线对称布置;四个舵角偏转驱动单元和四个转向减速传动单元一一对应,对应的舵角偏转驱动单元和转向减速传动单元刚性连接;每个转向减速传动单元连接一个舵片,同时每个转向减速传动单元上方安装有一个舵片择时展开单元;
8.收拢状态时,所述舵片收拢在舵片择时展开单元内部;
9.需要展开时,控制器向舵角偏转驱动单元发送舵偏角指令,舵角偏转驱动单元根据所述舵偏角指令生成转动角度和转动力矩,在所述转动力矩作用下转动;所述转动经过转向减速传动单元传递至舵片,驱动舵片产生角度偏转;当舵片角度偏转时,触发舵片择时展开单元动作,使收拢在舵片择时展开单元内部的舵片展开90
°
,并锁定;
10.展开过程中,每个转向减速传动单元对应一个位置反馈单元;位置反馈单元实时监测对应的转向减速传动单元的运动位置,并反馈给控制器,位置反馈单元与控制器形成伺服系统控制回路。
11.优选的,舵角偏转驱动单元包括驱动电机和减速器,驱动电机与减速器刚性连接,驱动电机的输出轴从减速器中伸出,用于输出减速后的转动角度和力矩。
12.优选的,四个位置反馈单元共用一个角度传感器贴装板,角度传感器贴装板贴装在支撑座体顶面上;
13.每个位置反馈单元包括一个角度传感器;
14.四个角度传感器贴焊在角度传感器贴装板上,且四个角度传感器沿角度传感器贴装板中心对称布置;四个角度传感器与四个舵角偏转驱动单元一一对应,每个角度传感器和角度传感器贴装板上对应加工有通孔,舵角偏转驱动单元中驱动电机的输出轴从对应的角度传感器和角度传感器贴装板的通孔中穿过,所述角度传感器能够准确测量穿过的输出轴的转动角度,并反馈给控制器。
15.优选的,支撑座体包括安装底座、安装主体以及若干支撑柱;
16.安装底座和安装主体通过若干支撑柱连接,且所述支撑柱向下穿过安装底座后与控制器固定连接,所述支撑柱向上穿过安装主体后与位置反馈单元、转向减速传动单元固定连接;舵角偏转驱动单元位于安装底座、安装主体以及若干支撑柱形成的内部空间中,且所述舵角偏转驱动单元与安装主体固定连接。
17.优选的,安装主体下表面设计有四处安装凸台,所述四处安装凸台沿安装主体下表面外圆周向均布,每个安装凸台侧壁上安装有一个舵片收拢止锁机构。
18.优选的,转向减速传动单元包括第一锥齿轮、第二锥齿轮、第三锥齿轮、第四锥齿轮、第二-第三锥齿轮连接转轴、第四锥齿轮转轴、舵片连接轴和传动支撑架;
19.第一锥齿轮与第二锥齿轮相啮合、第三锥齿轮与第四锥齿轮相啮合;第一锥齿轮与输出轴刚性连接,第二锥齿轮通过第二-第三锥齿轮连接转轴与第三锥齿轮刚性连接,第四锥齿轮通过舵片连接轴与舵片刚性连接;
20.第二-第三锥齿轮连接转轴和舵片连接轴安装在传动支撑架上。
21.优选的,舵片择时展开单元包括双边扭簧、舵片展开架、扭簧轴以及舵片展开止锁机构;
22.舵片展开架上设有与舵片宽度契合的槽口,所述舵片能够从槽口中完全穿过;
23.当舵片从槽口中穿过,舵片展开架与舵片连接轴接触后,舵片展开架与舵片连接轴刚性连接;舵片展开架上部设置有一个u型槽,双边扭簧安放在所述u型槽内,u型槽两侧开有通孔,扭簧轴穿过u型槽、双边扭簧、舵片上端的相应通孔,通过双边扭簧的预紧力将舵片展开架、双边扭簧、舵片连接固定;在双边扭簧的预紧力作用下,舵片能够自然展开90
°
;
24.舵片展开止锁机构安嵌在舵片展开架内部,具有一个能够提供弹力的触头;
25.舵片收拢止锁机构安装在舵片展开架下端,初始安装时,按压舵片,使其被舵片收拢锁止机构压紧在舵片展开架上,此时,舵片展开角度为0
°
,舵片收拢在舵片择时展开单元内部;
26.需要展开时,在控制器的舵偏角指令作用下,舵片角度偏转至舵片收拢止锁机构之外,在双边扭簧的预紧力下舵片快速展开90
°
,舵片展开到位后,触头伸入舵片根部的锁紧凹槽内,使舵片保持90
°
锁定状态。
27.优选的,每个舵片的偏转角度范围-25
°
~ 25
°
。
28.优选的,舵片的角度偏差精度≤5%。
29.优选的,一个舵角偏转驱动单元、一个位置反馈单元、一个转向减速传动单元、一个舵片择时展开单元和控制器,形成一路舵系统;四个舵角偏转驱动单元、四个位置反馈单元、四个转向减速传动单元、四个舵片择时展开单元和控制器形成四路十字正交分布的舵系统,四路舵系统均能独立控制对应的舵片动作。
30.本发明的有益效果为:
31.(1)本发明通过所设计的舵角偏转驱动单元、转向减速传动单元、舵片择时展开单元三者的联合作用,实现了舵片展开动作的触发完全基于角度指令下的舵角偏转,无需单独用于舵片展开的驱动单元和动作指令,大大简化了以往舵片展开形式舵系统的驱动传动链和指令信息链,且具有良好的主动择时展开功能。四路集成的微型舵系统整机最大外径不大于38mm,整机长度不大于50mm,整机重量小于80g,一体化集成设计,体积紧凑、质量轻巧,很好地满足了微型导弹较严苛的空间和性能要求。
32.(2)本发明的舵片展开动作不必在导弹出箱(筒)时刻触发,有效规避了发射时刻的高过载工况,可根据需要,在飞行阶段选择不同时机发送角度指令,完成舵片择时展开动作,有效提高了导弹伺服舵机系统的稳定性、抗过载能力和舵控精度。
33.(3)本发明通过转向减速传动单元和舵片择时展开单元两者结构的耦合,使得舵片展开和舵片偏转双动作同时进行,消除了导弹伺服舵系统在飞行控制中的无效时间,优化了导弹的飞行控制效果
34.(4)本发明能够满足各种复杂工况环境要求,结构稳定可靠,能够承受较大冲击和过载,整体装置拆装方便,工作寿命相对较长,具有良好的环境适应性和质量可靠性。
附图说明
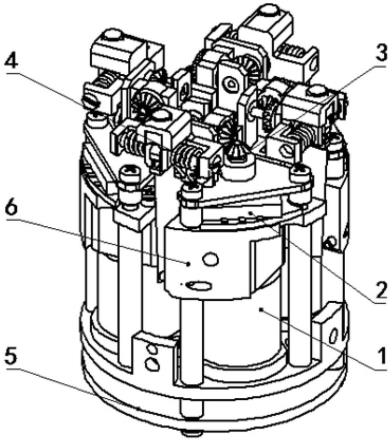
35.图1为本发明的装置的立体结构示意图;
36.图2为舵角偏转驱动单元示意图;
37.图3为位置反馈单元示意图;
38.图4为转向减速传动单元示意图;
39.图5为舵片择时展开单元示意图,其中(a)为整体示意图,(b)为局部示意图;
40.图6为安装支撑座体示意图;
41.图7为该发明装置工作过程示意图;
具体实施方式
42.下面结合附图对本发明做进一步叙述。
43.本发明提出一种仅基于角度指令的舵片择时展开微型舵系统,系统组成如图1-图6所示。该一种仅基于角度指令的舵片择时展开微型舵系统包括舵角偏转驱动单元1、位置反馈单元2、转向减速传动单元3、舵片择时展开单元4、控制器5以及支撑座体6。
44.支撑座体6为空心柱状结构,控制器5安装在支撑座体6下方;四个舵角偏转驱动单元1安装在支撑座体6内部,且四个舵角偏转驱动单元1沿支撑座体6轴线对称布置;四个转向减速传动单元3安装在支撑座体6顶面上,且四个转向减速传动单元3沿支撑座体6轴线对称布置;四个舵角偏转驱动单元1和四个转向减速传动单元3一一对应,对应的舵角偏转驱动单元1和转向减速传动单元3刚性连接;每个转向减速传动单元3连接一个舵片38,同时每个转向减速传动单元3上方安装有一个舵片择时展开单元4。
45.收拢状态时,所述舵片38收拢在舵片择时展开单元4内部。
46.需要展开时,控制器5向舵角偏转驱动单元1发送舵偏角指令,舵角偏转驱动单元1根据所述舵偏角指令生成转动角度和转动力矩,在所述转动力矩作用下转动;所述转动经过转向减速传动单元3传递至舵片,驱动舵片产生角度偏转;当舵片角度偏转时,触发舵片择时展开单元4动作,使收拢在舵片择时展开单元4内部的舵片展开90
°
,并锁定。
47.展开过程中,每个转向减速传动单元3对应一个位置反馈单元2。位置反馈单元2实时监测对应的转向减速传动单元3的运动位置,并反馈给控制器5,位置反馈单元2与控制器5形成伺服系统控制回路。
48.一个舵角偏转驱动单元1、一个位置反馈单元2、一个转向减速传动单元3、一个舵片择时展开单元4和控制器5,形成一路舵系统;四个舵角偏转驱动单元1、四个位置反馈单元2、四个转向减速传动单元3、四个舵片择时展开单元4和控制器5形成四路十字正交分布的舵系统,四路舵系统均能独立控制对应的舵片动作。
49.支撑座体6作为舵系统结构基体,与舵角偏转驱动单元1、位置反馈单元2、转向减速传动单元3、舵片择时展开单元4、控制器5均刚性连接,通过四路舵系统的集成设计,形成牢固稳定、空间紧凑的整体。
50.如图2所示,舵角偏转驱动单元1包括驱动电机11、减速器12,驱动电机11与减速器12刚性连接,两者之间可无差别传递转动和力矩,输出轴13从减速器12中伸出,可输出减速后的转动和力矩。
51.如图3所示,四个角度传感器21贴焊在角度传感器贴装板22上,且四个角度传感器21沿角度传感器贴装板22中心对称布置;四个角度传感器21与四个舵角偏转驱动单元1一一对应,每个角度传感器21和角度传感器贴装板22上对应加工有通孔,舵角偏转驱动单元1中驱动电机11的输出轴13从对应的角度传感器21和角度传感器贴装板22的通孔中穿过,所述角度传感器21能够准确测量穿过的输出轴13的转动角度,并反馈给控制器5,与控制器5形成伺服系统控制回路。一个角度传感器形成一个位置反馈单元2。
52.如图4所示,转向减速传动单元3包括第一锥齿轮31、第二锥齿轮32、第三锥齿轮33、第四锥齿轮34、第二-第三锥齿轮连接转轴35、第四锥齿轮转轴36、舵片连接轴37、舵片38和传动支撑架39。
53.第一锥齿轮31与第二锥齿轮32相啮合、第三锥齿轮33与第四锥齿轮34相啮合,以上两处齿轮传动副均可转向并减速传递转传动链中的转角和力矩;第一锥齿轮31与输出轴13刚性连接,第二锥齿轮32通过第二-第三锥齿轮连接转轴35与第三锥齿轮33刚性连接,第
四锥齿轮34通过舵片连接轴37与舵片38刚性连接,以上三处刚性连接均可直接传递传动链中的转角和力矩;最终,转向减速传动单元3中输入的转角和力矩可通过两级转向传动机构最终输出至舵片38,实现舵片的精确摆动。
54.第二-第三锥齿轮连接转轴35和舵片连接轴37安装在传动支撑架39上,使第一锥齿轮31、第二锥齿轮32、第三锥齿轮33、第四锥齿轮34能够准确定位安装于传动支撑架39上,传动运动和力矩。
55.如图5中(a)和(b)所示,舵片择时展开单元4包括双边扭簧41、舵片展开架42、扭簧轴43、舵片收拢止锁机构44、舵片展开止锁机构45。
56.双边扭簧41为舵片38展开动作提供足够的旋转力矩。舵片展开架42作为舵片择时展开单元4的主体支撑结构,与所述舵片连接轴37固定连接。
57.舵片展开架42上设有与舵片38宽度契合的槽口,使舵片38能够从槽口中完全穿过,直至舵片展开架42安装到舵片连接轴37上,并刚性连接。双边扭簧41安放在舵片展开架42上,扭簧轴43依次穿过舵片展开架42、双边扭簧41、舵片38的相应通孔,通过双边扭簧41的预紧力将以上三者连接固定。
58.至此,双边扭簧41、舵片展开架42、扭簧轴43与舵片连接轴37、舵片38形成一体,舵片38精确摆动的同时也带动双边扭簧41、舵片展开架42、扭簧轴43结构与之同步摆动。
59.同时,舵片38可以绕扭簧轴43在90
°
范围转动,在双边扭簧41的预紧力作用下,舵片38自然展开角度为90
°
,经过外力按压后,舵片38人为收拢角度为0
°
。在舵系统正常动作之前,需要人为抵抗双边扭簧41的预紧力,使舵片38收拢至0
°
,并收拢于舵片收拢锁止机构44内部,使舵系统在未收到角度指令前舵片38均完全收拢在弹体内部。当舵系统收到控制器的角度指令时,舵片38偏转角度至舵片收拢止锁机构44之外,在双边扭簧41的预紧力下快速展开到位,并压贴在舵片展开止锁机构45上,使舵片保持90
°
锁定状态。舵片展开止锁机构45安嵌在舵片展开架42内部,具有一个能够提供弹力的触头451,使触头451在舵片38展开位置时,伸入舵片38根部相应的锁紧凹槽381内,起到牢固锁紧舵片38展开的作用。
60.如图6所示,支撑座体6包括安装底座61、安装主体62、若干支撑柱63。安装支撑座体6作为舵系统结构基体,形成强度可靠、空间紧凑的整体。安装底座61的底面通过若干支撑柱63与控制器5固定连接,安装底座61的顶面包托住舵角偏转驱动单元1,安装主体62的底面与舵角偏转驱动单元1固定连接,安装主体62的顶面与位置反馈单元2固定连接,安装主体62的顶面通过若干支撑柱63与转向减速传动单元3固定连接,继而间接与舵片择时展开单元4固定连接,安装底座61、与安装主体62之间通过若干支撑柱63固定连接。
61.安装主体62上具有四处安装凸台621,用于安装舵片收拢止锁机构44,舵片收拢止锁机构44安嵌在安装凸台621侧壁,并横挡在舵片38的展开前沿上,使舵片38在未收到转角指令前收拢于导弹内部,起到牢固锁紧舵片38收拢的作用。
62.四组所述的舵角偏转驱动单元1、位置反馈单元2、转向减速传动单元3、舵片择时展开单元4和一组所述的控制器5,集成安装于安装支撑座体6上,通过安装支撑座体6的精准定位,形成四路十字正交分布的相同舵系统,四组舵系统均能独立控制对应的舵片38各种动作,控制导弹的飞行姿态和轨迹。
63.本发明舵片在收到角度指令到完全展开90
°
位置,所用展开时间不超过0.2ms。
64.四路集成的微型舵系统整机最大外径不大于38mm,整机长度不大于50mm,整机重
量小于80g。所述的四路集成的微型舵系分别给每个舵片提供足够的扭矩,每个舵片的偏转角度范围均较大,角度偏差精度较高。
65.微型舵系统给舵轴5提供扭矩为0.1nm~1nm;每个舵片的偏转角度范围-25
°
~ 25
°
;舵片的角度偏差精度≤5%。
66.本发明工作过程如下:
67.将四组舵系统装配调试完毕,保证均可按使用要求正常工作,舵片能平稳快速地响应控制器所发出的角度指令并驱动动作;将四组舵系统分别与支撑座体固定连接,并使用定位工装精确调整舵片零位,电气接插件从相应的走线孔内安插,完成控制器和位置反馈单元的电气通信;之后微型舵系统整机装入导弹发射箱(筒)内待发射。当微型导弹发射出箱(筒)后某时刻,根据飞行控制需要,控制器向舵角偏转驱动单元发出舵偏角指令,舵角偏转驱动单元发生转动,再经转向减速传动单元使舵片产生一定转角,当舵片转动脱离舵片收拢止锁机构时,舵片在双边扭簧作用下完全展开至90
°
位置,并通过舵片展开止锁机构保持锁定;最终舵片可在展开状态下,进行不同角度的偏转,实现导弹飞行姿态的伺服控制功能。
68.如图7所示为本发明装置工作过程示意图,微型舵系统最初处于初始收拢状态,接收到角度偏转指令后,舵片结束收拢状态,展开并保持展开状态,当接收到正常工作指令后进行动作。
69.本发明提出实例,通过利用一种仅基于角度指令的舵片择时展开微型舵系统,以实现舵片展开动作全部基于角度指令下的舵角偏转,可在导弹飞行阶段选择不同时机发送角度指令,完成舵片择时展开动作,优化导弹的飞行控制效果。
70.具体应用试验结果表明,本发明系统能够有效地实现舵片仅基于角度指令的择时展开动作,优化导弹飞行姿态的伺服控制功能。
71.本发明舵角偏转驱动单元根据控制器发出的舵偏角指令,由驱动电机和减速器发出初始的转动角度和力矩,之后经过转向减速传动单元中的两级传动机构最终驱动舵片的角度偏转;基于角度指令的角度偏转运动触发了舵片择时展开单元的工作,使收拢的舵片展开到位,并保持锁定状态;位置反馈单元中的角度传感器实时监测并精确反馈系统的运动位置,并与控制器形成伺服系统控制回路;最终舵片可在展开状态下,进行不同角度的偏转,实现导弹飞行姿态的伺服控制功能。本发明实现的舵片展开动作全部基于角度指令下的舵角偏转,无单独用于舵片展开的驱动单元和动作指令,体积紧凑、质量轻巧;系统可根据需要选择不同时机发送角度指令,完成舵片择时展开动作,并可达到较高的舵控精度;舵片展开和舵片偏转双动作同时进行,优化了导弹的飞行控制效果;整体装置拆装方便、结构稳定、可承受发射高过载工况。
72.本发明未详细说明部分属本领域技术人员公知常识。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。