一种3d激光雷达及足式机器人和清洁机器人
技术领域
1.本发明涉及激光雷达技术领域,尤其涉及了一种3d激光雷达及足式机器人和清洁机器人。
背景技术:
2.目前,3d激光雷达在工业测绘、三维建模、自动驾驶等领域应用广泛,但现有的3d激光雷达多为多线程激光雷达,价格昂贵。
3.中国专利cn113960566a公开了一种3d激光雷达及足式机器人,包括竖直扫描单元和使所述竖直扫描单元在水平方向旋转的水平旋转装置;所述竖直扫描单元包括安装座,以及依次设于所述安装座上的激光接收极、凸透镜、激光发射极、反光体,所述激光接收极设于所述凸透镜的焦点位置上,所述激光发射极设于所述凸透镜的主光轴上,所述反光体可转动的设于所述安装座上,所述反光体的回转中心与所述凸透镜的主光轴重合;所述激光发射极发射激光脉冲信号,通过所述反光体的旋转实现对竖直平面内的周圈环境扫描,并能通过设有旋转电机的水平旋转装置实现对三维环境的扫描。
4.上述技术方案实现了单线程激光雷达的三维扫描,但是,该技术方案在使用过程中发现,由于遮光通道距离防护罩较远,激光信号射出遮光通道后穿过防护罩之前,会在防护罩内发生散射,并与回路的激光信号产生相互干扰,影响激光接收极对激光信号的接收,进而导致激光雷达的扫描结果不够理想,用户体验差,不利于推广使用。
5.进一步地,激光发射极发出的激光信号在经过安装座上的防护罩时,激光信号会发生反射,进而影响激光接收极对回路的激光信号的接收。
技术实现要素:
6.为了克服现有技术的不足,本发明的目的一在于提供一种3d激光雷达,其在反光镜与防护罩之间设置遮光腔体,减少经反光镜射出的激光信号在防护罩内的散射和反射,提升激光雷达的扫描效果。
7.本发明的目的二在于提供一种3d激光雷达,其遮光腔体在跟随反光镜旋转过程中,始终保持遮光腔体的端部与弧状部的距离不变,发射出的激光信号在防护罩内的散射和反射保持不变,进而使激光雷达对外部环境的扫描结果更加稳定。
8.本发明的目的三在于提供一种足式机器人,其搭载的3d激光雷达,在反光镜与防护罩之间设置遮光腔体,减少经反光镜射出的激光信号在防护罩内的散射和反射,提升激光雷达的扫描效果。
9.本发明的目的四在于提供一种清洁机器人,其搭载的3d激光雷达,在反光镜与防护罩之间设置遮光腔体,减少经反光镜射出的激光信号在防护罩内的散射和反射,提升激光雷达的扫描效果。
10.为实现上述目的之一,本发明的第一种技术方案为:
11.一种3d激光雷达,包括竖向扫描单元,所述竖向扫描单元包括安装座、固定于所述
安装座上的防护罩;
12.所述安装座与所述防护罩之间,依次水平设有激光发射口、凸透镜、能转动的反光镜,所述反光镜的回转轴心与所述凸透镜的主光轴重合,所述激光发射口设于所述凸透镜的主光轴上;所述激光发射口水平发射出的激光信号,通过所述反光镜的反射和旋转,实现对竖向平面内的周圈环境扫描;
13.所述反光镜与所述防护罩之间设有遮光腔体,所述遮光腔体沿激光信号反射方向延伸,并设置于所述反光镜的回转轴心上,所述防护罩上设有贴近所述遮光腔体端部转动轨迹的弧状部,并使所述遮光腔体在转动过程中,其端部与所述弧状部之间的距离保持不变。
14.本发明经过不断探索,在反光镜与防护罩之间设置遮光腔体,减少经反光镜射出的激光信号在防护罩内的散射和反射,避免了与回路上的激光信号产生干扰,提升了激光雷达的扫描效果,结构简单实用,制造成本低,用户体验好,便于推广使用。
15.进一步,本发明的遮光腔体在跟随反光镜旋转过程中,始终保持遮光腔体的端部与弧状部的距离不变,发射出的激光信号在防护罩内的散射和反射保持不变,进而使激光雷达对外部环境的扫描结果更加稳定。
16.作为优选的技术措施,所述激光发射口与所述反光镜之间设有横向遮光件,所述横向遮光件包括固定于所述凸透镜主光轴上的第一遮光件、直接固定于所述反光镜上并跟随其转动的第二遮光件,所述第一遮光件套设于所述第二遮光件外侧;所述横向遮光件与所述遮光腔体相连通,所述第二遮光件、所述遮光腔体与所述反光镜接触的部位设有遮光垫。通过在水平方向上设置横向遮光件,避免发射出的激光信号与回路的激光信号产生干扰,并且不会泄露到防护罩的内部空间中去,与回路的激光信号产生干涉。将横向遮光件设置为第一遮光件和第二遮光件分开的结构,并且将第一遮光件套在第二遮光件外侧,防止发射出的激光信号打在第二遮光件上发生反射,进而影响激光雷达的扫描效果。
17.作为优选的技术措施,所述竖向扫描单元包括设于所述凸透镜焦点位置上的激光接收极、驱动所述反光镜转动的第一电机、第一编码器;所述第一编码器与所述反光镜同心固定连接,通过所述第一编码器获取所述反光镜的转动信息;所述激光发射口发射激光信号,并通过所述第一电机驱动所述反光镜旋转,实现对竖向平面内的周圈环境扫描。
18.作为优选的技术措施,所述3d激光雷达包括驱动所述竖向扫描单元水平转动的水平旋转装置,所述水平旋转装置包括上底壳转子、下底壳和固定在所述下底壳内的电机定子,所述安装座以及所述防护罩固定于所述上底壳转子上并随其转动,所述上底壳转子与所述下底壳之间设有动密封结构。水平旋转装置驱动竖向扫描单元在水平方向上旋转,进而实现单线程的激光雷达实现三维扫描。设置动密封结构,提升激光雷达整体的防水性,使其应用场景更为广泛。
19.作为优选的技术措施,所述上底壳转子与所述下底壳之间同心设有中空的无线电能传输模块,通过所述无线电能传输模块对所述竖向扫描单元进行供电。由于上底壳转子和下底壳之间存在相对转动,当需要进行供电和信号传输时,采用无线电能传输模块代替传统线缆,避免了线缆在往复转动过程中的疲劳损坏。
20.或/和所述上底壳转子的周向上沿同一圈均匀开设有通孔,通过所述通孔构成光电码盘来获取所述上底壳转子的转动信息,进而获取所述竖向扫描单元的水平转动信息。
21.或/和所述上底壳转子内固设有磁钢片,所述磁钢片的轴向宽度大于所述电机定子的轴向宽度,且所述磁钢片的上边缘高于所述电机定子的上边缘。该结构的设计,使得在竖向方向上,磁钢片高出电机定子一段,能使上底壳转子与电机定子之间产生较大的轴向磁拉力,从而水平旋转装置旋转更加稳定可靠,进而保证上底壳转子在转动过程中不会与下底壳分离。
22.作为优选的技术措施,所述下底壳上固定设有基座电路板,所述上底壳转子与所述下底壳之间同心设有无线信号传输组件,其使用光通讯来实现无线通讯;所述竖向扫描单元通过所述无线信号传输组件实现与所述基座电路板的无线通讯。
23.为实现上述目的之一,本发明的第二种技术方案为:
24.一种3d激光雷达,包括用于反射激光信号并能够转动的反光镜、弧状结构的防护罩;
25.所述防护罩与反光镜之间设有遮光腔体;所述遮光腔体为筒状结构,其具有转动轨迹为弧形的外端部,并能随反光镜转动;
26.所述防护罩上设有用于罩设所述遮光腔体的弧状部;
27.所述弧状部的部分截面形状或全部截面形状与外端部的转动轨迹为同心圆弧,形成间距不变结构,以使所述遮光腔体在转动过程中,其端部与所述弧状部之间的距离保持不变。
28.本发明经过不断探索,在反光镜与防护罩之间设置遮光腔体,减少经反光镜射出的激光信号在防护罩内的散射和反射,避免了与回路上的激光信号产生干扰,提升了激光雷达的扫描效果,结构简单实用,制造成本低,用户体验好,便于推广使用。
29.进一步,本发明的弧状部截面形状与外端部的转动轨迹为同心圆弧,从而形成间距不变结构,以使得遮光腔体在跟随反光镜旋转过程中,始终保持遮光腔体的端部与弧状部的距离不变,进而使得激光信号在防护罩内的散射和反射保持不变,进而使激光雷达对外部环境的扫描结果更加稳定。
30.作为优选的技术措施,
31.所述筒状结构为l形结构,其竖向段用于接收从反光镜中反射出的激光信号,其横向段用于接收从凸透镜中射出的激光信号;
32.所述竖向段向防护罩的壁面延伸,并与防护罩的壁面相邻;
33.所述凸透镜上设有第一遮光件;
34.所述第一遮光件套设于l形结构的横向段的外侧。
35.为实现上述目的之一,本发明的第三种技术方案为:
36.一种足式机器人,包括上述的一种3d激光雷达。
37.为实现上述目的之一,本发明的第四种技术方案为:
38.一种清洁机器人,包括上述的一种3d激光雷达。
39.相比现有技术,本发明的有益效果在于:
40.本发明提供的一种3d激光雷达,在反光镜与防护罩之间设置遮光腔体,减少经反光镜射出的激光信号在防护罩内的散射和反射,避免了与回路上的激光信号产生干扰,提升了激光雷达的扫描效果;并且,在遮光腔体跟随反光镜旋转过程中,始终保持遮光腔体的端部与弧状部的距离不变,发射出的激光信号在防护罩内的散射和反射保持不变,进而使
激光雷达对外部环境的扫描结果更加稳定。
41.本发明提供的一种清洁机器人,其搭载的3d激光雷达,在反光镜与防护罩之间设置遮光腔体,减少经反光镜射出的激光信号在防护罩内的散射和反射,避免了与回路上的激光信号产生干扰,提升了激光雷达的扫描效果;并且,在遮光腔体跟随反光镜旋转过程中,始终保持遮光腔体的端部与弧状部的距离不变,发射出的激光信号在防护罩内的散射和反射保持不变,进而使激光雷达对外部环境的扫描结果更加稳定。
42.本发明提供的一种足式机器人,其搭载的3d激光雷达,在反光镜与防护罩之间设置遮光腔体,减少经反光镜射出的激光信号在防护罩内的散射和反射,避免了与回路上的激光信号产生干扰,提升了激光雷达的扫描效果;并且,在遮光腔体跟随反光镜旋转过程中,始终保持遮光腔体的端部与弧状部的距离不变,发射出的激光信号在防护罩内的散射和反射保持不变,进而使激光雷达对外部环境的扫描结果更加稳定。
43.下面结合附图和具体实施方式对本发明作进一步详细说明。
附图说明
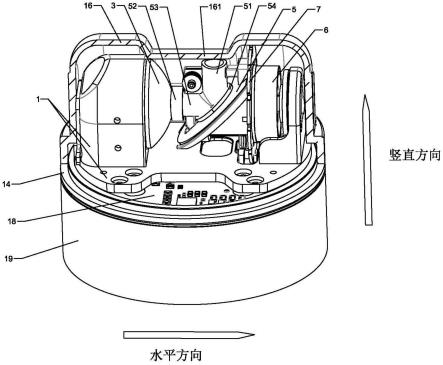
44.图1是本发明提供的一种3d激光雷达的整体结构示意图;
45.图2是本发明提供的一种3d激光雷达的竖向扫描单元的爆炸图;
46.图3是本发明提供的一种3d激光雷达的全剖图;
47.图4是本发明提供的一种3d激光雷达的爆炸图;
48.图5是本发明提供的清洁机器人的整体结构示意图。
49.图中:1、安装座;2、激光接收极;3、凸透镜;4、激光发射口;5、反光镜;51、遮光腔体;52、第一遮光件;53、第二遮光件;54、遮光垫;6、第一电机;7、第一编码器;8、上底壳转子;9、下底壳;10、电机定子;11、通孔;12、无线电能传输模块;13、基座电路板;14、动密封结构;15、磁钢片;16、防护罩;161、弧状部;17、无线信号传输组件;18、激光驱动电路板;19、水平旋转轴承;20、清洁机器人本体。
具体实施方式
50.下面,结合附图以及具体实施方式,对本发明做进一步描述,需要说明的是,在不相冲突的前提下,以下描述的各实施例之间或各技术特征之间可以任意组合形成新的实施例。
51.需要说明的是,当两个元件“固定连接”或“转动连接”时,两个元件可以直接连接或者也可以存在居中的元件。相反,当元件被称作“直接在”另一元件“上”时,不存在中间元件。本文所使用的术语“水平”、“竖向”、“横向”、“上”、“下”以及类似的表述只是为了说明的目的。除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文所使用的术语只是为了描述具体的实施例的目的,不是旨在限制本发明。
52.如图1、图2、图3、图4所示,本发明3d激光雷达的第一种实施例:
53.一种3d激光雷达,包括竖向扫描单元,所述竖向扫描单元包括安装座1、直接固定于所述安装座1上的防护罩16;所述安装座1与所述防护罩16之间,依次水平设有激光发射口4、凸透镜3、能转动的反光镜5,所述反光镜5的回转轴心与所述凸透镜3的主光轴重合,所
述激光发射口4设于所述凸透镜3的主光轴上;所述激光发射口4水平发射出的激光信号,通过所述反光镜5的反射和旋转,实现对竖向平面内的周圈环境扫描;所述反光镜5与所述防护罩16之间设有遮光腔体51,所述遮光腔体51沿激光信号射出方向直接固定于所述反光镜5的回转轴心上,所述防护罩16上设有贴近所述遮光腔体51端部转动轨迹的弧状部161,以使所述遮光腔体51在转动过程中,其端部与所述弧状部161之间的距离保持不变。
54.本发明3d激光雷达的第二种实施例:
55.一种3d激光雷达,包括竖向扫描单元,所述竖向扫描单元包括安装座1、固定于所述安装座1上的防护罩16。
56.所述安装座1与所述防护罩16之间,依次水平设有激光发射口4、凸透镜3、能转动的反光镜5,所述反光镜5的回转轴心与所述凸透镜3的主光轴重合,所述激光发射口4设于所述凸透镜3的主光轴上;所述激光发射口4水平发射出的激光信号,通过所述反光镜5的反射和旋转,实现对竖向平面内的周圈环境扫描。
57.所述反光镜5与所述防护罩16之间设有遮光腔体51,所述遮光腔体51沿激光信号反射方向延伸,并设置于所述反光镜5的回转轴心上,所述防护罩16上设有贴近所述遮光腔体51端部转动轨迹的弧状部161,并使所述遮光腔体51在转动过程中,其端部与所述弧状部161之间的距离保持不变。
58.本发明3d激光雷达的第三种实施例:
59.一种3d激光雷达,包括用于反射激光信号并能够转动的反光镜5、弧状结构的防护罩16。
60.所述防护罩16与反光镜5之间设有遮光腔体51;所述遮光腔体51为筒状结构,其具有转动轨迹为弧形的外端部,并能随反光镜5转动;
61.所述防护罩16上设有用于罩设所述遮光腔体51的弧状部161。
62.所述弧状部161的部分截面形状或全部截面形状与外端部的转动轨迹为同心圆弧,形成间距不变结构,以使所述遮光腔体51在转动过程中,其端部与所述弧状部161之间的距离保持不变。
63.本发明增设横向遮光件的一种具体实施例:
64.所述激光发射口4与所述反光镜5之间设有横向遮光件,所述横向遮光件包括固定于所述凸透镜3主光轴上的第一遮光件52、直接固定于所述反光镜5上并跟随其转动的第二遮光件53,所述第一遮光件52套设于所述第二遮光件53外侧;所述横向遮光件与所述遮光腔体51相连通,所述第二遮光件53、所述遮光腔体51与所述反光镜5接触的部位设有遮光垫54。通过在水平方向上设置横向遮光件,避免发射出的激光信号与回路的激光信号产生干扰,并且不会泄露到防护罩16的内部空间中去,与回路的激光信号产生干涉。将横向遮光件设置为第一遮光件52和第二遮光件53分开的结构,并且将第一遮光件52套在第二遮光件53外侧,防止发射出的激光信号打在第二遮光件53上发生反射,进而影响激光雷达的扫描效果。
65.本发明竖向扫描单元的一种具体实施例:
66.所述竖向扫描单元包括设于所述凸透镜3焦点位置上的激光接收极2、驱动所述反光镜5转动的第一电机6、第一编码器7、激光驱动电路板18。
67.所述第一编码器7与所述反光镜5同心固定连接,通过所述第一编码器7获取所述
反光镜5的转动信息;所述激光发射口4发射激光信号,并通过所述第一电机6驱动所述反光镜5旋转,实现对竖向平面内的周圈环境扫描。
68.本发明增设水平旋转装置的一种具体实施例:
69.所述3d激光雷达包括驱动所述竖向扫描单元水平转动的水平旋转装置,所述水平旋转装置包括上底壳转子8、下底壳9、水平旋转轴承19和固定在所述下底壳9内的电机定子10,所述安装座1以及所述防护罩16固定于所述上底壳转子8上并随其转动,所述上底壳转子8与所述下底壳9之间设有动密封结构14。水平旋转装置驱动竖向扫描单元在水平方向上旋转,进而实现单线程的激光雷达实现三维扫描。设置动密封结构14,提升激光雷达整体的防水性,使其应用场景更为广泛。
70.本发明增设无线电能传输模块12的一种具体实施例:
71.所述上底壳转子8与所述下底壳9之间同心设有中空的无线电能传输模块12,通过所述无线电能传输模块12对所述竖向扫描单元进行供电。由于上底壳转子8和下底壳9之间存在相对转动,当需要进行供电和信号传输时,采用无线电能传输模块12代替传统线缆,避免了线缆在往复转动过程中的疲劳损坏。
72.本发明实现无线通讯的一种具体实施例:
73.所述下底壳9上固定设有基座电路板13,所述上底壳转子8与所述下底壳9之间同心设有无线信号传输组件17,其使用光通讯来实现无线通讯;所述竖向扫描单元通过所述无线信号传输组件17实现与所述基座电路板13的无线通讯。
74.本发明获取转动信息的一种具体实施例:
75.所述上底壳转子8的周向上沿同一圈均匀开设有通孔11,通过所述通孔11构成光电码盘来获取所述上底壳转子8的转动信息,进而获取所述竖向扫描单元的水平转动信息。
76.本发明增设磁钢片15的一种具体实施例:
77.所述上底壳转子8内固设有磁钢片15,所述磁钢片15的轴向宽度大于所述电机定子10的轴向宽度,且所述磁钢片15的上边缘高于所述电机定子10的上边缘。该结构的设计,使得在竖向方向上,磁钢片15高出电机定子10一段,能使上底壳转子8与电机定子10之间产生较大的轴向磁拉力,从而水平旋转装置旋转更加稳定可靠,进而保证上底壳转子8在转动过程中不会与下底壳9分离。
78.如图5所示,应用本发明3d激光雷达的第一种具体实施例:
79.一种清洁机器人,包括上述的一种3d激光雷达、清洁机器人本体20。
80.应用本发明3d激光雷达的第二种具体实施例:
81.一种足式机器人,包括上述的一种3d激光雷达。
82.本技术中,固定连接方式可以为螺接或焊接或铆接或插接或通过第三个部件进行连接,本领域技术人员可根据实际情况进行选择。
83.最后应当说明的是:以上实施例仅用以说明本发明的技术方案而非对其限制,尽管参照上述实施例对本发明进行了详细的说明,所属领域的普通技术人员应当理解:依然可以对本发明的具体实施方式进行修改或者等同替换,而未脱离本发明精神和范围的任何修改或者等同替换,其均应涵盖在本发明的权利要求保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。