1.本发明涉及起重机定点停放检测技术领域,特别涉及一种起重机培训定点停放的培训装置及方法。
背景技术:
2.起重机作业人员实际操作技能培训是每一个起重机操作学员必须参与的培训课程。在培训过程中,学员需要操作起重机将吊桶被放置在规定好的停放区域。然后,教员前往停放区域内测量吊桶相对于停放区域的中心的偏离情况,从而对吊桶的停放结果进行评分。然而,这种考评方式存在效率低、测量准确度差等问题,严重影响了培训效率。
技术实现要素:
3.本发明所要解决的技术问题是:提供一种起重机培训定点停放的培训装置及方法,提高培训效率。
4.为了解决上述技术问题,本发明采用的技术方案为:
5.一种起重机培训定点停放的培训装置,包括起重机、吊桶、停放区域以及测量设备;
6.所述测量设备包括主控模块、无线收发模块和两个激光测距组件;
7.两个所述激光测距组件的测距激光均呈水平状态;
8.两个所述激光测距组件的测距激光的光路相互垂直并交叉,且交叉点的正向投影落入所述停放区域并与所述停放区域的中心点重合;
9.所述主控模块通过所述无线收发模块分别与两个所述激光测距组件通信连接。
10.为了解决上述技术问题,本发明采用的另一种技术方案为:
11.一种起重机培训定点停放的培训方法,应用于上述的一种起重机培训定点停放的培训装置,包括如下步骤:
12.s1、在吊桶被放置在停放区域后,分别获取两个所述激光测距组件照射所述吊桶后测得的第一测距值和第二测距值;
13.s2、根据所述第一测距值、所述第二测距值以及两个所述激光测距组件的激光发射口到两个所述激光测距组件的测距激光的交叉点的间距,得到所述吊桶上对应所述激光测距组件的照射点所在的水平截面圆的圆心到所述交叉点的直线偏移距离;
14.s3、根据所述直线偏移距离对所述吊桶的停放结果进行评分。
15.本发明的有益效果在于:提供一种起重机培训定点停放的培训装置及方法,利用两组激光测距组件来自动测量吊桶相对于停放区域的中心点的直线偏移距离,将两组激光测距组件的测距激光分两个相互垂直的方向照射吊桶,依靠控制模块采集第一测距值、第二测距值等数据并进行计算,相比于教员人工测量操作,提高了测量效率和准确度,节省了人力成本,增强培训评分的合理性,从而大幅度提升培训效率。
附图说明
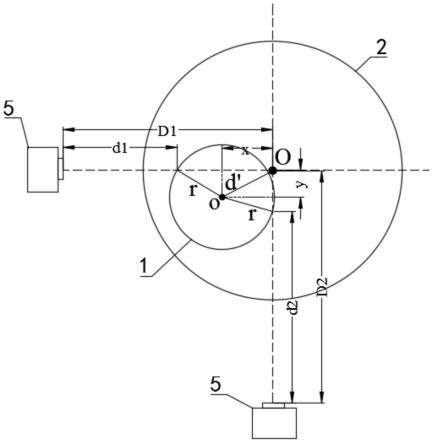
16.图1为本发明实施例的一种起重机培训定点停放的培训装置的两组激光测距组件与停放区域的相对位置示意图;
17.图2为本发明实施例涉及的一种起重机培训定点停放的激光测距组件的结构示意图;
18.图3为本发明实施例涉及的一种起重机培训定点停放的培训装置的系统框图;
19.图4为本发明实施例涉及的一种起重机培训定点停放的培训方法的步骤示意图。
20.标号说明:
21.1、吊桶;2、停放区域;3、主控模块;4、无线收发模块;5、激光测距组件;
22.31、控制器;32、供电电源;33、can通信模块;
23.51、激光测距仪;52、可调三脚支撑架;53、载物台;54、升降调节座。
具体实施方式
24.为详细说明本发明的技术内容、所实现目的及效果,以下结合实施方式并配合附图予以说明。
25.请参照图1至图3,一种起重机培训定点停放的培训装置,包括起重机、吊桶1、停放区域2以及测量设备;
26.所述测量设备包括主控模块3、无线收发模块4和两个激光测距组件5;
27.两个所述激光测距组件5的测距激光均呈水平状态;
28.两个所述激光测距组件5的测距激光的光路相互垂直并交叉,且交叉点的正向投影落入所述停放区域2并与所述停放区域2的中心点重合;
29.所述主控模块3通过所述无线收发模块4分别与两个所述激光测距组件5通信连接。
30.从上述描述可知,本发明的有益效果在于:利用两组激光测距组件5来自动测量吊桶1相对于停放区域2的中心点的直线偏移距离,将两组激光测距组件5的测距激光分两个相互垂直的方向照射吊桶1,依靠控制模块采集数据,相比于教员人工测量操作,提高了测量效率和准确度,节省了人力成本,增强培训评分的合理性,从而大幅度提升培训效率。
31.进一步地,所述激光测距组件5包括激光测距仪51、可调三脚支撑架52和载物台53;
32.所述载物台53设置于所述可调三脚支撑架52上,所述激光测距仪51设置于所述载物台53上;
33.所述激光测距仪51与所述无线收发模块4通信连接。
34.从上述描述可知,激光测距仪51通过载物台53设置在可调三脚支撑架52上,能够依靠调节可调三脚支撑架52来使得发射出的测距激光呈水平状态,以此适应不同的放置环境,保证良好的测距效果,使用灵活且方便。
35.进一步地,所述载物台53为旋转台。
36.从上述描述可知,载物台53为旋转台,可以靠自身旋转来调节激光测距仪51的激光发射角度,为人工调节带来便利。
37.进一步地,所述激光测距组件5还包括升降调节座54;
38.所述激光测距仪51设置于所述升降调节座54上,所述升降调节座54设置于所述载物台53上。
39.从上述描述可知,在载物台53上还设置了升降调节座54,可对激光测距仪51进行上下维度的位置调节。
40.进一步地,所述主控模块3包括控制器31、供电电源32和can通信模块33;
41.所述控制器31分别与所述无线收发模块4和所述can通信模块33相连;
42.所述供电电源32分别与所述控制器31、所述无线收发模块4和所述can通信模块33相连。
43.从上述描述可知,主控模块3由控制器31、供电电源32和can通信模块33组成,带有独立的供电电源32,可解除供电需求对装置摆放位置的限制,使用灵活,通过can通信模块33可与其他一些培训装置进行组网通信,从而满足实际的培训需求。
44.进一步地,还包括激光路径调节组件,所述激光路径调节组件包括激光水平尺和激光标靶。
45.从上述描述可知,激光水平尺和激光标靶可辅助调节测距激光的光线角度以及两束测距激光的交叉点的位置,确保两个激光测距组件5处于可进行测量的状态,有利于提高测量结果的准确度,降低人工调节的操作难度。
46.请参照图1和图4,一种起重机培训定点停放的培训方法,应用于上述的一种起重机培训定点停放的培训装置,包括如下步骤:
47.s1、在吊桶1放置在停放区域2后,分别获取两个所述激光测距组件5照射所述吊桶1后测得的第一测距值和第二测距值;
48.s2、根据所述第一测距值、所述第二测距值以及两个所述激光测距组件5的激光发射口到两个所述激光测距组件5的测距激光的交叉点的间距,得到所述吊桶1上对应所述激光测距组件5的照射点所在的水平截面圆的圆心到所述交叉点的直线偏移距离;
49.s3、根据所述直线偏移距离对所述吊桶的停放结果进行评分。
50.从上述描述可知,本发明的有益效果在于:利用两组激光测距组件5来自动测量吊桶1相对于停放区域2的中心点的直线偏移距离,将两组激光测距组件5的测距激光分两个相互垂直的方向照射吊桶1,依靠控制模块采集第一测距值、第二测距值等数据并进行计算,相比于教员人工测量操作,提高了测量效率和准确度,节省了人力成本,增强培训评分的合理性,从而大幅度提升培训效率。
51.进一步地,所述步骤s1之前还包括:
52.s0、测量两个所述激光测距组件5的激光发射口到所述交叉点的第一间距和第二间距;
53.所述步骤s2具体包括:
54.s21、分别以两个所述激光测距组件5的测距激光的路径为x轴和y轴,所述交叉点为原点,建立坐标系;
55.s22、以所述水平截面圆的圆心坐标为未知数,结合所述第一测距值、所述第二测距值、所述第一间距、所述第二间距以及所述水平截面圆的半径建立方程组并进行求解,得到所述水平截面圆的圆心坐标;
56.所述方程组的表达式为:
[0057][0058]
其中,d1和d1分别表示一个所述激光测距组件5的所述第一间距和所述第一测距值,d2和d2分别表示另一个所述激光测距组件5的所述第二间距和所述第二测距值,r表示所述水平截面圆的半径;
[0059]
s23、根据所述水平截面圆的圆心坐标得到所述直线偏移距离。
[0060]
本发明的一种起重机培训定点停放的培训装置及方法能够适用于起重机定点停放培训的场景,以下通过具体的实施方式进行说明:
[0061]
请参照图1至图3,本发明的实施例一为:
[0062]
一种起重机培训定点停放的培训装置,如图1和图3所示,包括起重机、吊桶1、停放区域2以及测量设备。其中,测量设备包括主控模块3、无线收发模块4和两个激光测距组件5。两个激光测距组件5的测距激光均呈水平状态。两个激光测距组件5的测距激光的光路相互垂直并交叉,且交叉点的正向投影落入停放区域2并与停放区域2的中心点重合。主控模块3通过无线收发模块4分别与两个激光测距组件5通信连接。并且,停放区域2可设置为多个,并分别配设两个激光测距组件5。
[0063]
在本实施例中,如图2所示,激光测距组件5包括激光测距仪51、升降调节座54、可调三脚支撑架52和载物台53。载物台53设置于可调三脚支撑架52上;激光测距仪51设置于升降调节座54上,升降调节座54设置于所述载物台53上。其中,载物台53为旋转台,可实现360
°
自由旋转。可调三脚支撑架52和升降调节座54使得激光测距仪51可在上下、左右和前后各个维度进行调节。其中,激光测距仪51的测距范围为0.05-80米,测量精度1mm,单次测量时间0.05-0.5秒,信号响应时间短,光斑半径小,可以满足定点检测的需要。
[0064]
在本实施例中,如图3所示,主控模块3包括控制器31、供电电源32和can通信模块33。控制器31分别与无线收发模块4和can通信模块33相连。供电电源32分别与控制器31、无线收发模块4和can通信模块33相连。其中,控制器31用的是32位的st意法半导体的stm32f103c8t6单片机。stm32f103c8t6是一款基于arm cortex-m内核stm32系列的32位的微控制器31,程序存储器容量是64kb,需要电压2v~3.6v,工作温度为-40℃~85℃,可以满足定点检测数据采集、计算和通信的需要。
[0065]
在本实施例中,还包括激光路径调节组件,激光路径调节组件包括激光水平尺和激光标靶。激光水平尺和激光标靶用于调节测距激光的光线角度以及两束测距激光的交叉点的位置。使用激光标靶标识停放区域2的中心点位置,以便于在调节过程中判断两束测距激光的交叉点是否与之发生重叠。
[0066]
请参照图1和图4,本发明的实施例二为:
[0067]
一种起重机培训定点停放的培训方法,应用于实施例一的一种起重机培训定点停放的培训装置,如图4所示,包括如下步骤:
[0068]
s0、测量两个激光测距组件5的激光发射口到交叉点的第一间距和第二间距;
[0069]
s1、在吊桶1被放置在停放区域2后,分别获取两个激光测距组件5照射吊桶1后测得的第一测距值和第二测距值;
[0070]
s2、根据第一测距值、第二测距值以及两个激光测距组件5的激光发射口到两个激光测距组件5的测距激光的交叉点的间距,得到吊桶1上对应激光测距组件5的照射点所在
的水平截面圆的圆心到交叉点的直线偏移距离;
[0071]
在本实施例中,如图1所示,o点为交叉点,即坐标系的原点,也是停放区域2的中心点;o点即为水平截面圆的圆心;线段d’为直线偏移距离。步骤s2具体包括:
[0072]
s21、分别以两个激光测距组件5的测距激光的路径为x轴和y轴,交叉点为原点,建立坐标系;
[0073]
s22、以水平截面圆的圆心坐标为未知数,结合第一测距值、第二测距值、第一间距、第二间距以及水平截面圆的半径建立方程组并进行求解,得到水平截面圆的圆心坐标;
[0074]
方程组的表达式为:
[0075][0076]
其中,d1和d1分别表示一个激光测距组件5的第一间距和第一测距值,d2和d2分别表示另一个激光测距组件5的第二间距和第二测距值,r表示水平截面圆的半径;
[0077]
s23、根据水平截面圆的圆心坐标得到直线偏移距离。
[0078]
在本实施例中,如图1所示,在求得水平截面圆的圆心坐标后,利用勾股定理即可计算出直线偏移距离,其表达式如下:
[0079][0080]
s3、根据直线偏移距离对吊桶的停放结果进行评分。
[0081]
综上所述,本发明提供的一种起重机培训定点停放的培训装置及方法,利用两组激光测距组件来自动测量吊桶相对于停放区域的中心点的直线偏移距离,将两组激光测距组件的测距激光分两个相互垂直的方向照射吊桶,依靠控制模块采集第一测距值、第二测距值等数据并进行计算,相比于教员人工测量操作,提高了测量效率和准确度,节省了人力成本,增强培训评分的合理性,从而大幅度提升培训效率。
[0082]
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等同变换,或直接或间接运用在相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。