1.本发明涉及果实采收技术领域,更具体的说,特别涉及一种梳理式山桐子采收装置。
背景技术:
2.山桐子是一种优秀的木本油料树种,同时还是生态树、观赏树,其果实含油量高、丰产性好、经济效益高。山桐子生长快速、树形优美、木材松软、花朵芳香、果实长序、结实量大、形似珍珠,除了可以作为新型用材树种和观赏树种开发之外,也同样具有成为新的优良木本油料树种的开发潜力和条件。山桐子油中亚油酸含量高达59.5%~81.5%,且总不饱和脂肪酸含量高,是一种潜在优质食用植物油,同时也是提取富集医药用途亚油酸的好原料。
3.经过多年的技术积累,山桐子在栽培、采摘、加工开发等方面都取得了进展。种植园的山桐子树主要种植在有一定坡度的山地上,山地坡度不会超过25
°
。现有的采摘技术主要采用搭设爬梯的人工采摘方式,安全系数低,操作困难。随着科技的发展也出现了越来越多的采摘设备,但在现有的采摘设备中主要以手动采摘为主,需要大量的劳动力且效率低下,同时在劳动过程中还容易对劳动人员造成伤害。
技术实现要素:
4.本发明的目的在于针对现有技术存在的技术问题,提供一种梳理式山桐子采收装置,可实现山桐子机械化采收,提高了山桐子的采摘效率,避免了山桐子采收过程中的劳动成本浪费。
5.为了解决以上提出的问题,本发明采用的技术方案为:
6.本发明提供一种梳理式山桐子采收装置,包括采摘头、采摘臂、支撑收集机构和行走机构,所述行走机构带动采收装置整体运动;所述支撑收集机构设置在所述行走机构上,用于对所述采摘臂和采摘头两者进行支撑并带动两者进行旋转,还用于收集山桐子果实;所述采摘臂连接采摘头并带动采摘头平移至指定高度,实现采摘头进行梳刷采摘作业;
7.所述采摘头包括采摘头执行机构和采摘头铲斗机构,所述采摘头铲斗机构用于储存所述采摘头执行机构进行梳刷采摘的果实;所述采摘头执行机构包括电机、梳刷齿动力轴和梳刷单元,所述梳刷齿动力轴设置在所述采摘头铲斗机构上,并连接有电机;所述梳刷齿动力轴上沿轴向依次设置有进行梳刷采摘的梳刷单元。
8.进一步的,所述采摘头铲斗机构包括铲斗体、铲斗连接铰链、铲斗底板、电动推杆和耳板,所述铲斗体的顶部连接所述梳刷齿动力轴,底端通过铲斗连接铰链活动连接所述铲斗底板,侧面分别设置所述电动推杆和耳板,所述电动推杆连接所述铲斗底板。
9.进一步的,所述梳刷齿动力轴上沿轴向并列且平行设置梳刷单元,所述梳刷单元包括设置在所述梳刷齿动力轴上的连接环、梳刷齿,所述连接环上沿周向均匀设置三个梳刷齿;所述梳刷齿包括直杆和弯杆,所述直杆的一端连接在所述连接环上,另一端连接弯
杆,所述直杆的直径大于弯杆。
10.进一步的,所述采摘臂包括采摘臂安装座、大臂辅助臂、大臂主臂、大臂动臂连接件、动臂辅助臂、动臂主臂和液压缸,所述大臂辅助臂和大臂主臂平行设置,两者的一端连接在所述采摘臂安装座上,另一端连接大臂动臂连接件;所述动臂辅助臂和动臂主臂也平行设置,两者的一端连接在所述大臂动臂连接件上,另一端连接所述耳板;所述大臂主臂和所述动臂主臂两者分别连接有液压缸。
11.进一步的,所述大臂辅助臂、大臂主臂、及采摘臂安装座和大臂动臂连接件部分组成大臂并呈平行四边形结构,所述动臂辅助臂、动臂主臂、及大臂动臂连接件和耳板部分组成动臂并呈平行四边形结构。
12.进一步的,所述支撑收集机构包括收集筐、支撑下底盘、回转支承、支撑上底盘、液压马达和支撑板,所述支撑上底盘和支撑下底盘两者分别设置在所述支撑板的上下方,两者之间设置回转支承;所述液压马达设置在所述支撑上底盘上,并连接所述回转支承;所述支撑上底盘上设置收集筐和采摘臂,所述收集筐连接支撑板,所述支撑下底盘连接行走机构。
13.进一步的,所述支撑收集机构还包括收集筐安装组件,所述收集筐安装组件包括快拆前挡板、快拆底座和快拆后挡板,所述快拆底座安装在所述支撑上底盘上,所述快拆前挡板和快拆后挡板两者相对设置,并活动设置在所述快拆底座上。
14.进一步的,所述收集筐安装组件还包括绑带,所述收集筐的两侧与所述支撑板之间设置绑带。
15.进一步的,所述铲斗体包括相对设置的铲斗侧板、连接相对铲斗侧板的铲斗斜板和铲斗背板,所述铲斗底板的一端与铲斗斜板活动连接,所述耳板位于所述铲斗背板上;所述铲斗侧板的顶端形成安装凸部,安装凸部两侧与对应的铲斗斜板和铲斗背板之间为斜面过渡,所述铲斗斜板由对应的铲斗侧板侧面向铲斗背板方向倾斜,并与铲斗底板之间的夹角为120
°
。
16.进一步的,所有梳刷齿上弯杆的朝向一致,并与所述梳刷齿动力轴的旋转方向一致,所述弯杆的弯曲角度为90
°
。
17.与现有技术相比,本发明的有益效果在于:
18.(1)本发明通过采摘头、采摘臂、支撑收集机构和行走机构的配合作用,实现山桐子机械化采收过程,避免了山桐子采收过程中的劳动成本和时间成本浪费,不需要劳动人员直接对果树操作,即可通过远程方式完成山桐子的采收过程,既减少了劳动力成本又在保证果实损伤符合采摘要求的前提下提高了山桐子采摘的效率;此外本发明的采摘头通过采摘头执行机构和采摘头铲斗机构,完成果实的梳刷采摘和储存,整体结构简单、功能可靠也易于实现。
19.(2)本发明的采摘头铲斗机构通过铲斗体储存果实,并设置电动推杆连接铲斗底板,控制铲斗底板进行偏转运动,从而使铲斗体打开或闭合,结构简单也可靠。
20.(3)本发明的采摘头执行机构通过在梳刷齿动力轴上依次设置梳刷单元,每个梳刷单元通过连接环设置多个梳刷齿,即采用模块化设计,如遇到单个梳刷单元的梳刷齿损坏的情况,可以通过拆卸采摘头执行机构来单独维护一个梳刷单元,从而减少采摘过程中的维护成本以及维护时间。
21.(4)本发明的采摘臂采用双平行四边形结构的采摘臂,可以有效保证采摘过程中,采摘臂带动采摘头上下移动时采摘头的稳定性,不会在移动中导致铲斗中山桐子倾撒出来,从而保证采摘工作的可靠性。
22.(5)本发明支撑收集机构通过液压马达和回转支承,带动采摘臂和采摘头进行旋转运动,并设置有收集筐安装组件,可以方便快速的安装和拆卸收集筐,当收集筐满时只需更换上空筐即可继续进行收集,与传统的将果实打落在地再拾起的采摘过程相比,节省了采摘之后的收集时间。
附图说明
23.为了更清楚地说明本发明中的方案,下面将对实施例描述中所需要使用的附图作一个简单介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。其中:
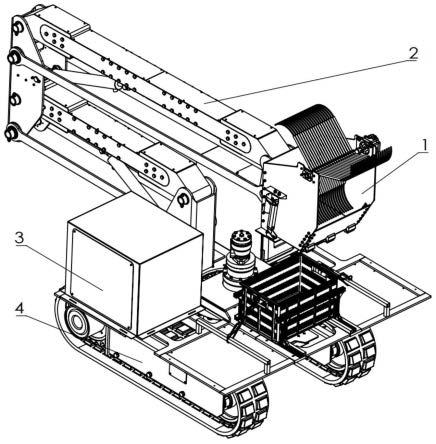
24.图1是本发明梳理式山桐子采收装置的整体轴测图。
25.图2是本发明采摘头的整体轴测图。
26.图3是本发明采摘头铲斗机构的整体轴测图。
27.图4是本发明采摘头执行机构的整体轴测图。
28.图5是本发明采摘头执行机构的部分示意图。
29.图6是本发明采摘臂的整体轴测图。
30.图7是本发明支撑收集机构的整体轴测图。
31.图8是本发明支撑收集机构的部分示意图。
32.附图标记说明:1-采摘头、2-采摘臂、3-支撑收集机构、4-行走机构、5-采摘头执行机构、6-采摘头铲斗机构、7-电机、8-电机安装板、9-联轴器、10-轴承座安装板、11-轴承座、12-梳刷齿动力轴、13-梳刷齿紧定螺钉、14-梳刷单元、141-连接环、142-梳刷齿、15-铲斗体、151-铲斗侧板、152-铲斗斜板、153-铲斗背板、1501-安装凸部、16-铲斗连接铰链、17-铲斗底板、18-电推下安装座、19-电动推杆、20-电推上安装座、21-电推连接件、22-耳板、23-采摘臂安装座、24-大臂辅助臂、25-大臂主臂、26-大臂动臂连接件、27-动臂辅助臂、28-动臂主臂、201-第一液压缸、202-第二液压缸、29-快拆座前挡板、30-快拆座底座、31-收集筐、32-绑带、33-快拆座后挡板、301-支撑下底盘、302-回转支承、303-支撑上底盘、304-液压马达、35-支撑板。
具体实施方式
33.除非另有定义,本文所使用的所有技术和科学术语与属于本发明技术领域的技术人员通常理解的含义相同;本文在说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明,例如,术语“长度”、“宽度”、“上”、“下”、“左”、“右”、“前”、“后”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置为基于附图所示的方位或位置,仅是便于描述,不能理解为对本技术方案的限制。
34.本发明的说明书和权利要求书及上述附图说明中的术语“包括”和“具有”以及它们的任何变形,意图在于覆盖不排他的包含;本发明的说明书和权利要求书或上述附图中的术语“第一”、“第二”等是用于区别不同对象,而不是用于描述特定顺序。本发明的说明书
和权利要求书及上述附图说明中,当元件被称为“固定于”或“安装于”或“设置于”或“连接于”另一个元件上,它可以是直接或间接位于该另一个元件上。例如,当一个元件被称为“连接于”另一个元件上,它可以是直接或间接连接到该另一个元件上。
35.此外,在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本发明的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。
36.本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
37.参阅图1所示,本发明提供一种梳理式山桐子采收装置,该装置包括采摘头1、采摘臂2、支撑收集机构3和行走机构4,所述行走机构4连接支撑收集机构3,所述支撑收集机构3连接采摘臂2,所述采摘臂2连接采摘头1,整体结构采用模块化设计,便于安装和维护。
38.所述行走机构4带动采收装置整体运动,所述支撑收集机构3对采摘头1和采摘臂2两者进行支撑并带动两者进行旋转运动,还用于收集山桐子果实。所述采摘臂2带动采摘头1平移至指定高度,实现采摘头1对山桐子果实进行梳理式采摘作业。
39.如附图2所示,所述采摘头1包括采摘头执行机构5和采摘头铲斗机构6,通过采摘头执行机构5完成山桐果实子的梳刷采摘任务,并将梳理下的山桐子果实储存在采摘头铲斗机构6中。
40.如附图3所示,所述采摘头铲斗机构6包括铲斗体15、铲斗连接铰链16、铲斗底板17、电推下安装座18、电动推杆19、电推上安装座20、电推连接件21和耳板22,所述铲斗体15包括相对设置的铲斗侧板151、连接相对铲斗侧板151的铲斗斜板152和铲斗背板153,所述铲斗底板17的一端与铲斗斜板152活动连接,即两者通过铲斗连接铰链16连接,并与铲斗侧板151和铲斗背板153组合成容纳果实的箱体。
41.所述铲斗侧板151的侧面设置电推连接件21,所述电动推杆19的一端通过电推上安装座20设置在所述电推连接件21上,另一端连接设置在所述铲斗底板17上的电推下安装座18。所述铲斗背板153上还设置耳板22,所述耳板22与采摘臂2相连接,可以保证运动过程中始终保持铲斗体15的平稳。
42.具体的,所述铲斗侧板151的侧面分别设置同步运动的电动推杆19,并带动所述铲斗底板17围绕铲斗连接铰链16在0
°
到30
°
之间稳定转动,同时盛放果实时具有自锁功能,不会因铲斗底板17受力而自行开合。通过电动推杆19的伸缩,带动铲斗底板17进行偏转运动,即控制所述铲斗体15的开合状态,以此完成山桐子的储存和山桐子果实的倒出功能,使得果实能够可靠地落入支撑收集机构3内。
43.如附图4和附图5所示,所述采摘头执行机构5包括电机7、电机安装板8、联轴器9、梳刷齿动力轴12、梳刷单元14、轴承座安装板10和轴承座11。
44.所述梳刷齿动力轴12设置在所述铲斗体15的铲斗侧板151上,一端通过联轴器9与电机7相连,以此实现动力传输。所述电机7通过电机安装板8安装在采摘头铲斗机构6的铲斗侧板151上,所述梳刷齿动力轴12的另一端通过轴承座11和轴承座安装板10与铲斗侧板151相连接,以此实现对采摘头执行机构5的支撑。所述梳刷齿动力轴12上均匀设置有梳刷单元14,每个梳刷单元14通过梳刷齿紧定螺钉13固定在所述梳刷齿动力轴12上,可以保证连接可靠。
45.进一步的,所述梳刷单元14包括连接环141和梳刷齿142,所述连接环141上沿周向均匀设置三个梳刷齿142。所述梳刷齿142包括直杆和弯杆,所述直杆的一端连接在所述连接环141上,另一端连接弯杆,所述直杆的直径大于弯杆。所有梳刷齿142上弯杆的朝向一致,并与所述梳刷齿动力轴12的旋转方向一致,优选的,所述弯杆的弯曲角度为90
°
。
46.具体的,所述梳刷齿142的数量可以根据实际需要进行增加或减少,但采用一个或两个的话,所述梳刷单元14空转的行程过长,影响整个装置的采收效率,而采用三个以上,则不方便加工、成本高,避免梳刷齿142产生损坏,减少更换频率,因此梳刷齿142采用三个,在保证梳刷单元14工作稳定性的前提下,也能节约成本,方便安装。
47.具体的,每个所述梳刷单元14中梳刷齿142上弯杆的弯曲角度一致,且弯曲的方向也一致,这样可以保证梳刷效率,并与所述梳刷齿动力轴12的旋转方向一致,这样方便梳刷齿142将树枝勾进铲斗体15内部,从而可靠地将果实梳刷下来。
48.本实施例中,将梳理式采摘方式应用到山桐子果实采摘作业上,采摘头执行机构5通过电机7带动梳刷宽度300mm的梳刷单元14旋转,并通过梳刷齿142的作用,可将梳刷下的果实收集入最大容量为15l的铲斗体15中。由于梳刷齿142采用先细后粗的结构造型,即弯杆的直径小于直杆,细齿部分即弯杆可以保证采摘过程中,能够顺利地引导树枝进入相邻梳刷齿142之间,而粗齿部分即直杆可以保证梳刷齿142的整体强度,从而将果实梳刷下来,同时粗细的分齿也保证了加工的简便性。
49.进一步,所述铲斗侧板151的顶端形成安装凸部1501,安装凸部1501两侧与对应的铲斗斜板152和铲斗背板153之间为斜面过渡,方便安装所述采摘头执行机构5的梳刷单元14。所述铲斗斜板152由对应的铲斗侧板151侧面向铲斗背板153方向倾斜,优选的,所述铲斗斜板152与铲斗底板17之间的夹角为120
°
,所述梳刷齿142置于相对的铲斗侧板151之间,其弯杆的端部凸出铲斗斜板152,能够更好地勾到树枝进行果实梳刷。同时通过设置铲斗斜板152可以增大铲斗体15的容量,并使所述铲斗体15的下端形成收口,方便铲斗体15内的果实落入支撑收集机构3内,也能够在树枝等异物进入铲斗体15内,在梳刷单元14的作用下容易顺出去避免发生堵塞。
50.如附图6所示,所述采摘臂2包括采摘臂安装座23、大臂辅助臂24、大臂主臂25、大臂动臂连接件26、动臂辅助臂27、动臂主臂28和液压缸。
51.所述采摘臂安装座23将采摘机构2和支撑收集机构3连接在一起,所述大臂辅助臂24和大臂主臂25平行设置,两者的一端连接在所述采摘臂安装座23上,另一端连接大臂动臂连接件26。所述动臂辅助臂27和动臂主臂28也平行设置,两者的一端连接在所述大臂动臂连接件26上,另一端连接设置在所述采摘头铲斗机构6的耳板22。所述大臂主臂25和所述动臂主臂28两者分别连接有液压缸。
52.进一步的,所述大臂辅助臂24、大臂主臂25、及采摘臂安装座23和大臂动臂连接件26部分组成大臂并呈平行四边形结构,所述动臂辅助臂27、动臂主臂28、及大臂动臂连接26和耳板22部分组成动臂并呈平行四边形结构,两个平行四边形机构保证采摘头1在运动的过程中始终与支撑收集机构3保持平行,保证在对山桐子树采摘过程中移动采摘头1的稳定性,使铲斗体15中的山桐子不会倾出。
53.本实施例中,所述大臂主臂25和采摘臂安装座23之间设置第一液压缸201,所述动臂主臂28和大臂动臂连接件26之间设置第二液压缸202,通过两个液压缸的作用下,带动整
个采摘臂2进行展开。
54.如附图7和附图8所示,所述支撑收集机构3包括收集筐31、支撑下底盘301、回转支承302、支撑上底盘303、液压马达304和支撑板35,所述支撑上底盘303和支撑下底盘301两者分别设置在所述支撑板35的上下方,两者之间设置回转支承302。所述液压马达304设置在所述支撑上底盘303上,并连接所述回转支承302。所述支撑上底盘303上设置收集筐31和采摘臂2的采摘臂安装座23,所述收集筐31连接支撑板35,所述支撑下底盘301连接行走机构4。
55.进一步的,所述支撑收集机构3还包括收集筐安装组件,所述收集筐安装组件包括快拆前挡板29、快拆底座30、收集筐31、绑带32、快拆后挡板33,所述快拆底座30安装在所述支撑上底盘303上,所述快拆前挡板29和快拆后挡板33两者相对设置,并活动设置在所述快拆底座30上,方便调整收集筐31的位置并夹紧。所述收集筐31两侧与所述支撑板35之间设置绑带32,通过绑带32固定收集筐31的左右位置。
56.本实施例中,所述快拆底座30适用的收集筐31宽度可在300~400mm、长度可在400~840mm之间进行调节,通过活动设置快拆前挡板29和快拆后挡板33,可以适应不同尺寸的收集筐,并可以快速完成收集筐的安装和拆卸工作。通过液压马达304和回转支承302两者的配合作用,带动支撑上底盘303和支撑板35两者进行旋转运动,从而带动收集筐31和采摘臂2进行旋转运动,方便采摘头1进行采摘作用,提高整个装置的工作效率。
57.本实施例中,所述行走机构4采用液压履带式底盘,避免了电动底盘在户外长时间作业会遇到的续航问题,同时减少了对地面的压力增加了车辆的通过性,也能够给予采收装置更足的动力攀爬25
°
山地复杂的坡面。
58.本发明提供的梳理式山桐子山地采收装置,具体工作过程如下:
59.在进行采摘之前,需要先将收集筐31安装在快拆底座30上,通过移动快拆前挡板29和快拆后挡板33将收集筐31夹紧,同时通过绑带32绑住收集筐31和支撑板35。
60.在采摘过程中,行走机构4工作带动采收装置整体运动到山桐子树前,第一液压缸201和第二液压缸202工作,驱动大臂主臂25和动臂主臂28运动,将采摘臂2整体进行展开,并在支撑收集机构3的作用下,带动采摘头1旋转运动至合适的采摘位置。打开电机7使采摘头执行机构5开始工作,电机7带动梳刷齿动力轴12旋转运动,进而带动梳刷单元14转动,通过梳刷齿142作用在山桐子的枝杆上完成采摘,山桐子果实落入铲斗体15内腔。
61.当完成一棵山桐子树的采摘之后,关闭电机7使采摘头执行机构5停止工作,将支撑收集机构3旋转回正,同时将采摘臂2折叠复位,使采摘头1正对于收集筐31上方。正转电动推杆19推动铲斗底板17,使铲斗体15底面打开,将山桐子倾倒出来并落入所述收集筐31内,反转电动推杆19使铲斗底板17复位,开启下一轮工作循环。当收集筐31装满时,只需要更换新收集筐即可马上开始工作,减少了工作时间,提高了工作效率。
62.本发明提供的梳理式山桐子采收装置,能够提高山桐子的采收效率和采摘质量,避免人工采摘造成的劳动力成本以及时间成本的浪费,可以实现在25
°
山地作业并完成1.6~3.5m山桐子树的采摘任务。
63.上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。