1.本发明涉及自动化技术领域,ipc分类号为:b25j13/08,具体涉及一种用于六轴机械手视觉检测的一键标定算法。
背景技术:
2.六轴机械手主要用于工业生产中,产品的自动化加工与转运操作,在实际的使用六轴机械手对产品物料进行处理的过程中,首先需要进行产品物料的在加工台面上的定位,当六轴机械手中的视觉传感器检测到产品物料位置后,才能进行后续的加工处理,但是现阶段物料工件在加工台面上的工具坐标系标定中精度不高,同时由于物料工件的下料误差以及实际加工过程中的环境因素的影响,通常会造成工具坐标系定位不准确的问题。
3.专利cn201410311052提供了一种机械手臂位置调整的辅助装置,此专利通过在晶圆的加工台面上设置位置检测器,用以实时监测晶圆的放置位置是否准确,如果晶圆放置的偏差较大时,将会自动通知工程师进行调整,但是此专利中所述位置检测器限制了待检测晶圆的尺寸类型,当待检测晶圆的尺寸大小发生变化时,则无法进一步进行位置数据的检测,应用范围有限。专利cn201510168995提供了一种基于主动双目视觉的机械手手眼标定方法,此专利中通过在机械手末端建立结构光发生器,用以进行机械手末端运行位姿数据的反馈检测,从而无需在机械手末端添加标志点,在实现机械手运动位姿检测的同时简化了控制结构,但是此专利中所述的结构光受环境的影响较大,无法更好的应用于如焊接机器人等场景中。
4.针对现有的六轴机械手工件位置标定中存在的问题,工厂加工过程中通常会采用手动二次调节或示教器手动调节的方式,但是手动人工对点标定依赖于技术工人的熟练程度与认真程度,主观性较大,因此往往在标定过程中由于人工的肉眼误差无法保证对点的精度,而示教器示教的方式过程交过繁琐,需要反复调节示教,因此需要有一套自动校正的程序同时进行多个工具坐标系位置点的校正,因此本发明提供了一种用于六轴机械手视觉检测的一键标定算法。
技术实现要素:
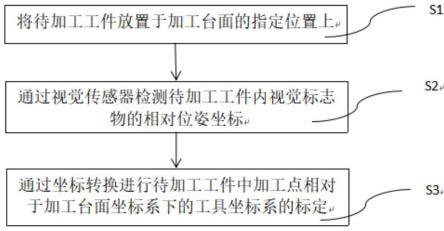
5.针对上述存在的问题,本发明提供了一种用于六轴机械手视觉检测的一键标定算法,具体算法流程为,将待加工工件放置于加工台面的指定位置上,通过视觉传感器检测待加工工件内视觉标志物的相对位姿坐标,通过坐标转换进行待加工工件中加工点相对于加工台面坐标系下的工具坐标系的标定。
6.优选的,所述的视觉传感器中,建立关于视觉标志物的参数化识别文件,所述的参数化识别文件包括视觉标志物的边缘特征,像素特征与识别数量。
7.具体的,所述的视觉标志物的边缘特征采用形态识别的方式,首先提取待加工工件表面识别到的线条特征,再根据多个线条特征的形状与方位值进行训练与配准。
8.优选的,所述的参数化识别文件,通过与视觉传感器实际识别的视觉标定物特征
进行特征配准,用以进行视觉标志物特征提取。
9.优选的,所述的特征配准,采用基于图形特征筛选训练为主,像素特征辅助配准的方式,进行视觉标志物的识别。
10.优选的,所述的参数化识别文件,通过设定识别次数,对待加工工件进行循环读取,在工件加工过程中,对视觉标志物进行动态位姿重定位。
11.优选的,所述的特征配准,首先通过视觉传感器获取待加工工件的图片数据,对图片数据进行图像处理;其中所述的图像处理包括待加工工件表面前景特征与背景特征的分离;在所述的分离的基础上,对待加工工件进行边缘特征提取优化。
12.具体的,针对所述的视觉标志物采集的图像和背景颜色等相差较大的物体,可直接通过ccd相机进行图片数据的采集与视觉标志物的识别,在进行待加工工件表面前景特征与背景特征的分离之前,首先使用基于pcl点云库进行图片数据的滤波与降噪,并在此基础调节图片数据的曝光与增益值,从而更好的消除外接环境光的变换对视觉图像处理算法的影响。
13.优选的,所述的特征配准,将边缘特征提取优化后的待加工工件与参数化识别文件中的边缘特征进行配准,以此对视觉标志物进行分类提取,在分类提取的基础上,对视觉标志物进行边界轮廓线矫正。
14.优选的,在所述的边界轮廓线矫正后进行中心化计算。
15.具体的,所述的边界轮廓线矫正通过对具有边界轮廓线的图片数据进二值化处理,从而采集基于边界轮廓数据的数据集合,在数据集合中建立基于高斯分布的数据集合优化平滑方法,并调用基于opencv的算子库,针对数据集合建立基于平均值对称测量的中心矩计算边缘轮廓数据中的中心位置。
16.优选的,通过所述的中心化计算,确定视觉标志物的相对位姿坐标系,将多个相对坐标系与加工台面坐标系进行坐标转换,并建立基于相对位姿坐标与加工台面坐标系的偏差矩阵,用以对实际的工具坐标系进行位置补偿。
17.优选的,所述的视觉标志物为多个协同标定方式。
18.与现有技术相比,本发明的有益效果在于:
19.(1)本发明所述的一种用于六轴机械手视觉检测的一键标定算法,具体的,通过识别待加工工件上的多个视觉标志物建立相对坐标系,并使用视觉标志物中的相对坐标对加工台面上的工具坐标进行基于偏差矩阵的补偿,从而不限待加工工件的尺寸,无需人工调节与示教器示教,既可以迅速对机械手对应的待加工工件的工具坐标系进行高精度自动化标定,提升了工件的加工质量与自动化程度。
20.(2)在(1)的基础上,本发明所述的视觉检测方式中,通过对待加工工件在加工过程中进行视觉标志物的循环读取,用以在工件加工的过程中,实时进行工件加工点的位置辅助校正,所述的动态位姿重定位,通过计算工件加工点相对于多个视觉标志物的相对位置坐标,与预设的加工坐标进行偏差计算,从而实现加工点位姿的实时调整,提高工件加工定位精度。
21.(3)在(1)的基础上,本发明所述的待加工工件在加工过程中,由于待加工工件下料变形,加工温度或者加工压力等多种因素的影响,可能会造成待加工工件的变形,如果直接在变形的工件上进行视觉标志物的特征提取,将会造成特征图像的畸变,因此本发明在
此部分添加了边界轮廓线矫正,在此基础上再进行中心化计算,提高视觉标志物位姿坐标计算的准确度。
22.(4)在(3)的基础上,本发明对视觉传感器采集的图像数据进行基于前景特征与背景特征的分离处理,在分离处理后再进行前景特征的边缘特征提取优化,从而避免了视觉标志物与场景融合部分边缘模糊噪声较多的情况,提高了视觉标志物边缘特征提取的质量,进一步提高了视觉标志物的位姿定位精度。
23.(5)在(1)的基础上,本发明建立了基于多个视觉标志物的协同位姿标定方式,相比于单一的视觉标志物定位造成的定位不准确的问题,本发明首先对视觉标志物识别到的相对坐标系进行融合,并将融合后的相对坐标系与工具坐标系进行融合与偏差纠正,从而提高视觉标志物自身的定位精度。
附图说明
24.图1为一种基于自适应芯片的邻域相连异构设计方法流程图。
具体实施方式
25.实施例1:
26.本实施例中所述的一种基于自适应芯片的邻域相连异构设计方法,如图1所示,具体算法流程为,将待加工工件放置于加工台面的指定位置上,通过视觉传感器检测待加工工件内视觉标志物的相对位姿坐标,通过坐标转换进行待加工工件中加工点相对于加工台面坐标系下的工具坐标系的标定。
27.其中,所述的加工台面中设置由机械定位装置,作为加工工件的初步定位位置区域,之后通过视觉传感器中的视觉图像处理算法,识别加工工件上的视觉标志物,通过视觉标志物在初步定位区域的基础上进一步对待加工工件进行位置校准。
28.具体的,所述的位置校准的主要步骤为:
29.a1、首先对视觉传感器进行初始化与内参设定;
30.a2、在s1的基础上在视觉传感器中建立视觉标志物标定模型,输出视觉标志物模型句柄后,使用视觉标志物模型对视觉传感器进行参数更新;
31.a3、将待加工工件放置于工位中,通过参数化识别文件识别待加工工件中需要识别的对象;
32.a4、通过视觉传感器获取加工台板的初始化参数,同时获取待加工工件中视觉标志物的图像数据;
33.a5、在s4的基础上,对图像数据进行滤波处理,以及表面前景特征与背景特征的分离;
34.a6、在s6的基础上,提取视觉标志物的边界轮廓线,并对边界轮廓线进行边界轮廓线矫正,其中所述的边界轮廓线矫正,在进行边界轮廓线矫正的基础上,进行边缘轮廓线的最邻近法边缘拟合,计算拟合的便捷轮廓线的中心位置,以中心位置为相对位置坐标系;
35.a7、将多个相对坐标系转换为工具坐标系,通过工具坐标系与视觉传感器中的视觉坐标系进行配准,从而实现视觉的识别。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。