技术特征:
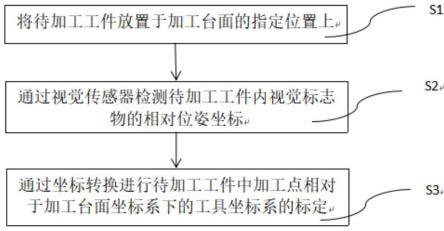
1.一种用于六轴机械手视觉检测的一键标定算法,其特征在于,具体算法流程为,s1、将待加工工件放置于加工台面的指定位置上;s2、通过视觉传感器检测待加工工件内视觉标志物的相对位姿坐标;s3、通过坐标转换进行待加工工件中加工点相对于加工台面坐标系下的工具坐标系的标定。2.根据权利要求1所述的一种用于六轴机械手视觉检测的一键标定算法,其特征在于,所述的视觉传感器中,建立关于视觉标志物的参数化识别文件,所述的参数化识别文件包括视觉标志物的边缘特征,像素特征与识别数量。3.根据权利要求2所述的一种用于六轴机械手视觉检测的一键标定算法,其特征在于,所述的参数化识别文件,通过与视觉传感器实际识别的视觉标定物特征进行特征配准,用以进行视觉标志物特征提取。4.根据权利要求3所述的一种用于六轴机械手视觉检测的一键标定算法,其特征在于,所述的特征配准,采用基于图形特征筛选训练为主,像素特征辅助配准的方式,进行视觉标志物的识别。5.根据权利要求3所述的一种用于六轴机械手视觉检测的一键标定算法,其特征在于,所述的参数化识别文件,通过设定识别次数,对待加工工件进行循环读取,在工件加工过程中,对视觉标志物进行动态位姿重定位。6.根据权利要求3所述的一种用于六轴机械手视觉检测的一键标定算法,其特征在于,所述的特征配准,首先通过视觉传感器获取待加工工件的图片数据,对图片数据进行图像处理;其中所述的图像处理包括待加工工件表面前景特征与背景特征的分离;在所述的分离的基础上,对待加工工件进行边缘特征提取优化。7.根据权利要求6所述的一种用于六轴机械手视觉检测的一键标定算法,其特征在于,所述的特征配准,将边缘特征提取优化后的待加工工件与参数化识别文件中的边缘特征进行配准,以此对视觉标志物进行分类提取,在分类提取的基础上,对视觉标志物进行边界轮廓线矫正。8.根据权利要求7所述的一种用于六轴机械手视觉检测的一键标定算法,其特征在于,在所述的边界轮廓线矫正后进行中心化计算。9.根据权利要求8所述的一种用于六轴机械手视觉检测的一键标定算法,其特征在于,通过所述的中心化计算,确定视觉标志物的相对位姿坐标系,将多个相对坐标系与加工台面坐标系进行坐标转换,并建立基于相对位姿坐标与加工台面坐标系的偏差矩阵,用以对实际的工具坐标系进行位置补偿。10.根据权利要求1所述的一种用于六轴机械手视觉检测的一键标定算法,其特征在于,所述的视觉标志物为多个协同标定方式。
技术总结
本发明涉及自动化技术领域,具体涉及一种用于六轴机械手视觉检测的一键标定算法。本发明具体算法流程为,S1、将待加工工件放置于加工台面的指定位置上;S2、通过视觉传感器检测待加工工件内视觉标志物的相对位姿坐标;S3、通过坐标转换进行待加工工件中加工点相对于加工台面坐标系下的工具坐标系的标定。本发明所述的一种用于六轴机械手视觉检测的一键标定算法,具体的,通过识别待加工工件上的多个视觉标志物建立相对坐标系,并使用视觉标志物中的相对坐标对加工台面上的工具坐标进行基于偏差矩阵的补偿,从而不限待加工工件的尺寸,提升了工件的加工质量与自动化程度。提升了工件的加工质量与自动化程度。提升了工件的加工质量与自动化程度。
技术研发人员:苏宁
受保护的技术使用者:昆山文慧电子有限公司
技术研发日:2022.07.01
技术公布日:2022/12/12
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。