技术特征:
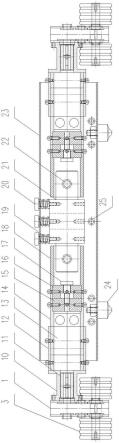
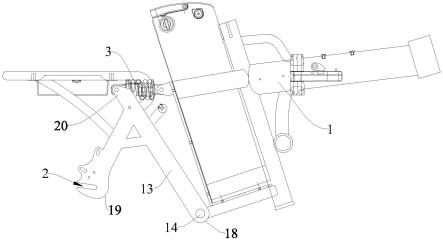
1.一种组合轮式重载磁吸附爬壁机器人,其特征在于,包括:机壳、机架中轴、中轴销、凹轴外套、凹轴、连接轴、凸轴、凸轴外套、马达以及组合磁轮系统;所述机架中轴通过中轴销连接凹轴外套,所述凹轴固定在所述凹轴外套的端面,并通过所述连接轴和所述凸轴连接,所述凸轴固定在所述凸轴外套的端部,所述凸轴外套内嵌设所述马达,所述组合磁轮系统至少为两组,分别安装在所述机壳的两侧,所述马达用于驱动所述组合磁轮系统运动,以使爬壁机器人前进、后退或转向。2.根据权利要求1所述的组合轮式重载磁吸附爬壁机器人,其特征在于,所述组合磁轮系统包括多个磁轮组、齿轮变速箱、齿轮动力轴、过桥变速齿轮以及齿磁轮轴;所述齿轮动力轴通过连接套与所述马达连接,所述齿磁轮轴的两侧分别设有所述磁轮组,当所述马达转动时,带动所述齿轮动力轴转动并传动所述过桥变速齿轮,所述过桥变速齿轮传动所述齿磁轮轴并带动所述磁轮组转动。3.根据权利要求2所述的组合轮式重载磁吸附爬壁机器人,其特征在于,所述磁轮组为四个,所述齿磁轮轴为两根,两个所述磁轮组分别安装在一根齿磁轮轴的两端。4.根据权利要求3所述的组合轮式重载磁吸附爬壁机器人,其特征在于,所述磁轮组包括导磁金属轮和永磁磁钢,所述导磁金属轮和永磁磁钢间隔分布,同时所述导磁金属轮接触壁面,所述永磁磁钢不接触壁面。5.根据权利要求2所述的组合轮式重载磁吸附爬壁机器人,其特征在于,所述齿轮变速箱包括变速箱机架和两端夹板,两端夹板上安装所述齿轮动力轴,所述齿轮变速箱的两侧安装四个磁轮组。6.根据权利要求2所述的组合轮式重载磁吸附爬壁机器人,其特征在于,所述组合磁轮系统通过法兰套入外管连接固定,所述外管嵌设所述凸轴外套。7.根据权利要求1所述的组合轮式重载磁吸附爬壁机器人,其特征在于,所述机架中轴通过多个固定轴安装在所述机壳上。8.根据权利要求7所述的组合轮式重载磁吸附爬壁机器人,其特征在于,所述固定轴上套设柔性弹簧,所述柔性弹簧的上端抵靠在所述机壳的内壁上,所述柔性弹簧的下端抵靠在所述机架中轴的圆周面上。9.根据权利要求1所述的组合轮式重载磁吸附爬壁机器人,其特征在于,所述机壳上设有多个滚珠地脚以及加强支撑。
技术总结
本实用新型公开了一种组合轮式重载磁吸附爬壁机器人,属于爬壁机器人制造技术领域,包括机壳、机架中轴、中轴销、凹轴外套、凹轴、连接轴、凸轴、凸轴外套、马达以及组合磁轮系统;机架中轴通过中轴销连接凹轴外套,凹轴固定在凹轴外套的端面,并通过连接轴和凸轴连接,凸轴固定在凸轴外套的端部,凸轴外套内嵌设述马达,马达用于驱动组合磁轮系统运动,以使爬壁机器人前进、后退或转向。本实用新型磁吸附力强,可在天花板以及凸凹不平的导磁壁面上携带除锈、喷漆、探伤等工具作业,能全方位自由行走,原地360度任意转向,代替人工携带较重的工具在各种复杂的高空导磁壁面上或导磁天花板上工作。上工作。上工作。
技术研发人员:孟新 杨利民
受保护的技术使用者:徐州迈科特装备制造有限公司
技术研发日:2022.08.30
技术公布日:2022/11/29
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。