1.本发明涉及导航技术领域,尤其是一种基于行人大数据的智能导航系统及其方法。
背景技术:
2.随着时代的进步,导航应用场合越来越多,精度也不断的提高。导航方式以及导航信息获取的方法不断升级多样化。导航的应用无处不在,不仅在军事应用广泛,也深入到人们的日常生活中各方面,如应急救援人员实时导航、商场的室内导航等等。在当今社会,人们对于位置精准的需求日益迫切,卫星导航技术广泛应用行人导航领域,基于卫星导航技术也有无法避免的劣势,在室外开阔环境下能解决大部分定位需求,但是对于建筑物内或者大型遮蔽场所内的导航定位,难以形成精准的定位。
技术实现要素:
3.本发明的目的是通过提出一种基于行人大数据的智能导航系统及其方法,以解决上述背景技术中提出的缺陷。
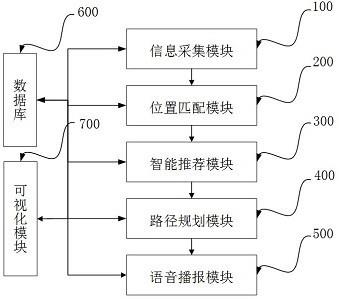
4.本发明采用的技术方案如下:提供一种基于行人大数据的智能导航系统,包括:信息采集模块:用于采集行人当前位置信息;位置匹配模块:用于根据行人当前位置信息与场景地图进行位置匹配;智能推荐模块:用于根据行人当前位置信息推荐周边站点,并智能推荐站点车辆位置信息;路径规划模块:用于根据行人的目标地点生成路线方案;语音播报模块:用于根据行人选择的路线方案智能生成播报语音。
5.作为本发明的一种优选技术方案:还包括数据库和可视化模块,所述数据库用于存储、上传和修改场景地图数据;所述可视化模块用于可视化显示路线及周围环境信息。
6.作为本发明的一种优选技术方案:还提供一键定位功能对行人当前位置进行场景地图匹配与实时定位。
7.提供一种用于行人大数据分析的智能导航方法:包括如下步骤:s1.1:获取场景地图;s1.2:根据gps接收器获取行人当前位置坐标,并与场景地图进行匹配显示;s1.3:根据场景地图中行人当前位置推荐公共交通站点以及即将到达公共交通站点的公共车辆位置信息;s1.4:根据行人的目标地点进行路径规划并进行路线推荐,根据行人选择的路线方案及交通方式生成实时播报语音,并实时更新当前位置。
8.作为本发明的一种优选技术方案:所述s1.1中场景地图存储于数据库中,具有后台上传和修改功能。
9.作为本发明的一种优选技术方案:所述s1.3中,通过权重函数以距离最短为筛选条件,智能推荐行人当前位置附近的公共交通站点以及距离公共交通站点最近的公共车辆位置信息。
10.作为本发明的一种优选技术方案:所述权重函数如下;根据行人当前位置划分周围公共交通站点共k个,对于第个公共交通站点的第条路线上的第辆公共车辆,有权重公式如下:其中,为第个公共交通站点的第条路线上的第辆公共车辆的权重,为向k个公共交通站点行驶的总公共车辆数,为行驶的第辆公共车辆,n为当前行驶在起始公共交通站点与距行人最近的公共交通站点间的公共车辆总数;其中,为公共车辆距离权值,满足:为公共车辆距离权值,满足:为第路线上的起始公共交通站点距离行人当前位置附近的公共交通站点的站点总数,为路线上的起始公共交通站点距离行人当前位置附近的公共交通站点的站点数量,为路线上的第个公共交通站点距离上一个公共交通站点的距离,为公共车辆已到达公共交通站点的数量,为公共车辆到达的前个公共交通站点的距离之和,为公共车辆与第个公共交通站点的距离,其中,;当公共车辆恰好到达下一公共交通站点时,。
11.作为本发明的一种优选技术方案:所述s1.4中,通过改进人工势场法,将斥力势场表示为障碍区域,引力势场表示为可行驶区域,对路线进行导航规划,改进后斥力势场函数为:为:为斥力增益系数,为目标位置斥力范围,为行人距离障碍物斥力势场中心的距离,增加控制量,为目标位置斥力势场外围与斥力势中心的距离,e为数学常量,当到达目标点时,为目标点位置,为行人与目标点位置之间的欧式距离,控制量值为0,斥力势场函数也为0。
12.作为本发明的一种优选技术方案:根据改进人工势场法进行路线导航规划,获取所有的可行路径集合,通过权重函数根据路径最短、耗时最少和经过路口最少三种筛选条件生成路线方案,为行人生成路线推荐方案。
13.作为本发明的一种优选技术方案:所述s1.4中,根据行人选择的路线方案生成实时播报语音,并通过磁导航传感器检测行人在磁带轨道上的偏移量并在场景地图上实时更新,导航过程中,当检测行人前进方向出现错误时,通过语音播报功能提示并生成新的路线
方案。
14.本发明提供的一种基于行人大数据的智能导航系统及其方法,与现有技术相比,其有益效果有:通过权重函数根据不同筛选条件进行权重分配,为行人推荐不同的路线方案,并通过改进的人工势场法对建筑物内或者大型遮蔽场所内的目标位置形成精准的定位,还可提醒行人避障,场景地图可以根据实际路况的改变进行调整,为行人提供更舒适的导航体验。
附图说明
15.图1为本发明优选实施例的系统框图;图2为本发明优选实施例中方法流程图;图3为本发明优选实施例中路线可视化位置图;图4为本发明优选实施例中智能推荐图。
16.图中各个标记的意义为:100、信息采集模块;200、位置匹配模块;300、智能推荐模块;400、路径规划模块;500、语音播报模块;600、数据库;700、可视化模块。
具体实施方式
17.需要说明的是,在不冲突的情况下,本实施例中的实施例及实施例中的特征可以相互组合,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
18.参照图1,本发明优选实施例提供了一种基于行人大数据的智能导航系统,包括:信息采集模块100:用于采集行人当前位置信息;位置匹配模块200:用于根据行人当前位置信息与场景地图进行位置匹配;智能推荐模块300:用于根据行人当前位置推荐周边站点,并智能推荐站点车辆位置信息;路径规划模块400:用于根据行人的目标地点生成路线方案;语音播报模块500:用于根据行人选择的路线方案智能生成播报语音。
19.还包括数据库600和可视化模块700,数据库600用于存储、上传和修改场景地图数据;可视化模块700用于可视化显示路线及周围环境信息。
20.还提供一键定位功能对行人当前位置进行场景地图匹配与实时定位。
21.参照图2,提供一种用于行人大数据分析的智能导航方法,包括如下步骤:s1.1:获取场景地图;s1.2:根据gps接收器获取行人当前位置坐标,并与场景地图进行匹配显示;s1.3:根据场景地图中行人当前位置推荐公共交通站点以及即将到达公共交通站点的公共车辆位置信息;s1.4:根据行人的目标地点进行路径规划并进行路线推荐,根据行人选择的路线方案及交通方式生成实时播报语音,并实时更新当前位置。
22.s1.1中场景地图存储于数据库600中,具有后台上传和修改功能。
23.s1.3中,通过权重函数以距离最短为筛选条件,智能推荐行人当前位置附近的公共交通站点以及距离公共交通站点最近的公共车辆位置信息。
24.权重函数如下;根据行人当前位置划分周围公共交通站点共k个,对于第个公共交通站点的第条路线上的第辆共车辆,有权重公式如下:其中,为第个公共交通站点的第条路线上的第辆公共车辆的权重,为向k个公共交通站点行驶的总公共车辆数,为行驶的第辆公共车辆,n为当前行驶在起始公共交通站点与距行人最近的公共交通站点间的公共车辆总数;其中,为公共车辆距离权值,满足:为公共车辆距离权值,满足:为第路线上的起始公共交通站点距离行人当前位置附近的公共交通站点的站点总数,为路线上的起始公共交通站点距离行人当前位置附近的公共交通站点的站点数量,为路线上的第个公共交通站点距离上一个公共交通站点的距离,为公共车辆已到达公共交通站点的数量,为公共车辆到达的前个公共交通站点的距离之和,为公共车辆与第个公共交通站点的距离,其中;当公共车辆恰好到达下一公共交通站点时,。
25.s1.4中,通过改进人工势场法,将斥力势场表示为障碍区域,引力势场表示为可行驶区域,对路线进行导航规划,改进后斥力势场函数为:为:为斥力增益系数,为目标位置斥力范围,为行人距离障碍物斥力势场中心的距离,增加控制量,为目标位置斥力势场外围与斥力势场中心的距离,e为数学常量,当到达目标点时,为目标点位置,为行人与目标点位置之间的欧式距离,控制量值为0,斥力势场函数也为0。
26.根据改进人工势场法进行路线导航规划,获取所有的可行路径集合,通过权重函数根据路径最短、耗时最少和经过路口最少三种筛选条件生成路线方案,为行人生成路线推荐方案。
27.s1.4中,根据行人选择的路线方案生成实时播报语音,并通过磁导航传感器检测行人在磁带轨道上的偏移量并在场景地图上实时更新,导航过程中,当检测行人前进方向出现错误时,通过语音播报功能提示并生成新的路线方案。
28.本实施例中,以图3所示位置,行人需要到达玄武门景点为例。
29.信息采集模块100采集行人当前位置信息;通过位置匹配模块200根据行人当前位置信息与数据库600中的场景地图进行位置匹配;检测到行人当前处于交叉路口旁,通过权重函数:根据行人所在位置划分周围公共交通站点共k个,对于第个公共交通站点的第条路线上的第辆公共车辆,有权重公式如下:其中,为第个公共交通站点的第条路线上的第辆公共车辆的权重,为向k个公共交通站点行驶的总公共车辆数,为行驶的第辆公共车辆,n为当前行驶在起始公共交通站点与距行人最近的公共交通站点间的公共车辆总数;其中,为公共车辆距离权值,满足:为公共车辆距离权值,满足:为第路线上的起始公共交通站点距离行人当前位置附近的公共交通站点的站点总数,为路线上的起始公共交通站点距离行人当前位置附近的公共交通站点的站点数量,为路线上的第个公共交通站点距离上一个公共交通站点的距离,为公共车辆已到达公共交通站点的数量,为公共车辆到达的前个公共交通站点的距离之和,为公共车辆与第个公共交通站点的距离,其中,;当公共车辆恰好到达下一公共交通站点时,。
30.以距离最短为筛选条件,智能推荐行人当前所在位置附近的公共交通站点以及距离公共交通站点最近的公共车辆位置信息,如图4所示的新模范马路东站、玄武湖隧道站、新模范马路东(市公交集团)站和新模范马路地铁站。并通过权重函数筛选出最近的新模范马路东公交车站,以及新模范马路东公交车站的114路公交车、83路公交车和32路公交车的到站信息。
31.通过改进的人工势场法:通过改进的人工势场法:为斥力增益系数,为目标位置斥力范围,为行人距离障碍物斥力势场中心的距离,增加控制量,为目标位置斥力势场外围与斥力势场中心的距离,e为数学常量,当到达目标点时,为目标点位置,为行人与目标点位置之间的欧式距离,控制量值为0,斥力势场函数也为0。
32.生成路线方案,通过改进的人工势场法进行导航路线生成,计算量较小,且可以避开地图中出现的障碍物,同时避免了由于目标位置外围出现障碍物而无法到达目标点情况的发生。
33.通过权重函数以路径最短、步行时间最少两个不同的筛选条件生成两种不同的路
线方案。即直接步行到达玄武门景点,或通过公交车辆到达玄武门景点。
34.当行人选择直接步行到达玄武门景点时,语音播报模块500根据行人选择的步行路线方案智能生成播报语音,并且通过磁导航传感器检测行人在磁带轨道上的偏移量并在场景地图上实时更新,还可通过改进的人工势场法提醒行人避障;导航过程中,当检测行人前进方向出现错误时,通过语音播报功能提示并生成新的路线方案。
35.导航全过程中,通过可视化模块700可视化显示并更新行人的位置信息及导航路线。
36.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
37.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。