1.本发明属于列车检修技术领域,尤其涉及一种列车检修时自动定轴的方法及系统。
背景技术:
2.在停车库内列车的自动化检修作业流程中,由于列车的停靠位置并不总是在同一位置,而是在一个停车范围内,因此对列车的定位直接影响到检修流程是否能顺畅运行以及检修的精度。
3.由于列车停靠位置不固定,车厢间的距离是允许一定弹性变化的,因此目前运用在列车自动化检修作业流程中主要以确定车轴位置的方式来定位列车位置及每节车厢的具体位置。现有的点激光定轴方法以主要是利用激光距离的变化,在竖直点激光和侧面点激光同时检测到有类似车轴(理论上是半圆曲线)及车轮(出现在侧面点激光的测距范围内)的变化时可以检测到车轴,这种方式的部署速度快,但是容易受到地沟环境、车轴新旧(新车轴的反光性会严重影响激光的效果)及车底其它部件,尤其是车底线缆以及其它与车轮同平面的部件(如atc天线)的影响。
技术实现要素:
4.有鉴于此,本发明提供一种列车定轴方法及系统,通过高效精准的定轴在自动化列车检测流程中用于确定列车的停靠位置及每节车厢的准确位置,优化列车检测流程,提高检测准确度。
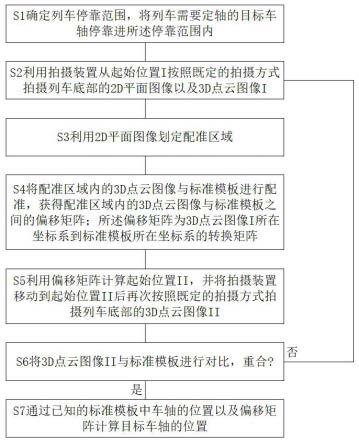
5.为解决以上技术问题,本发明的技术方案为采用一种列车定轴方法,包括: s1确定列车停靠范围,将列车需要定轴的目标车轴停靠进所述停靠范围内;s2利用拍摄装置从起始位置i按照既定的拍摄方式拍摄列车底部的2d平面图像以及3d点云图像i;s3利用2d平面图像划定配准区域;s4将配准区域内的3d点云图像与标准模板进行配准,获得配准区域内的3d点云图像与标准模板之间的偏移矩阵;所述偏移矩阵为3d点云图像i所在坐标系到标准模板所在坐标系的转换矩阵;s5利用偏移矩阵计算起始位置ii,并将拍摄装置移动到起始位置ii后再次按照既定的拍摄方式拍摄列车底部的3d点云图像ii;s6将3d点云图像ii与标准模板进行对比,若二者重合则认为偏移矩阵准确;s7通过已知的标准模板中车轴的位置以及偏移矩阵计算目标车轴的位置。
6.作为一种改进,所述拍摄装置包括agv,所述agv上安装有机械臂;所述机械臂末端固定有相机。
7.作为一种进一步的改进,拍摄之前构建列车停靠范围内的环境地图并规划拍摄路线和停车点,通过示教确定机械臂拍照时的姿态。
8.作为另一种更进一步的改进,所述利用偏移矩阵计算起始位置ii的方法为:s51通过偏移矩阵获取配准区域内的3d点云图像与标准模板之间的偏移量;s52将偏移量从模板坐标系转移到世界坐标系下;s53将起始位置i在世界坐标系下的坐标减去偏移量获得起始位置ii在世界坐标系下的坐标。
9.作为一种改进,所述将偏移量从模板坐标系转移到世界坐标系下的方法为:将偏移量从标准模板所在坐标系转移到机械臂末端坐标系;将偏移量从机械臂末端坐标系转移到机械臂底座坐标系;将偏移量从机械臂底座坐标系转移到世界坐标系。
10.作为一种改进,所述标准模板所在坐标系为拍摄标准模板时在第一拍摄点的相机坐标系,所述标准模板为将相机在所有拍摄点拍摄到的点云拼合到该坐标系而成;所述3d点云图像i所在坐标系为拍摄3d点云图像i时在第一拍摄点的相机坐标系,所述3d点云图像i为将相机在所有拍摄点拍摄到的点云拼合到该坐标系而成。
11.作为一种改进,所述计算目标车轴的位置的方法包括:s71通过偏移矩阵获取配准区域内的3d点云图像与标准模板之间的偏移量;s72将偏移量从模板坐标系转移到世界坐标系下;s73将标准模板中车轴的在世界坐标系下的位置坐标加上偏移量获得目标车轴在世界坐标系下的位置坐标。
12.本发明还提供一种列车定轴系统,包括:图像获取单元,用于从起始位置i按照既定的拍摄方式拍摄列车底部的2d平面图像以及3d点云图像i,从起始位置ii按照既定的拍摄方式拍摄列车底部的3d点云图像ii;配准区域划定单元,用于利用2d平面图像划定配准区域;偏移矩阵获取单元,用于将配准区域内的3d点云图像与标准模板进行配准,获得配准区域内的3d点云图像与标准模板之间的偏移矩阵;所述偏移矩阵为3d点云图像i所在坐标系到标准模板所在坐标系的转换矩阵;起始位置ii获取单元,用于利用偏移矩阵计算起始位置ii;对比单元,用于将3d点云图像ii与标准模板进行对比;车轴位置计算单元,用于通过已知的标准模板中车轴的位置以及偏移矩阵计算目标车轴的位置。
13.作为一种改进,所述起始位置ii获取单元包括:偏移量获取单元,用于通过偏移矩阵获取配准区域内的3d点云图像与标准模板之间的偏移量;偏移量转移单元,用于将偏移量从模板坐标系转移到世界坐标系下;计算单元,用于将起始位置i在世界坐标系下的坐标减去偏移量获得起始位置ii在世界坐标系下的坐标。
14.作为一种改进,所述车轴位置计算单元包括:偏移量获取单元,用于通过偏移矩阵获取配准区域内的3d点云图像与标准模板之间的偏移量;偏移量转移单元,用于将偏移量从模板坐标系转移到世界坐标系下;
计算单元,用于将标准模板中车轴的在世界坐标系下的位置坐标加上偏移量获得目标车轴在世界坐标系下的位置坐标。
15.本发明的有益之处在于:1、不受地沟环境、车轴新旧及车底其它部件,尤其是车底线缆以及其它与车轮同平面的部件(如atc天线)的影响,使得定轴的精确度提高,从而提高车体定位的精度;2、系统开销小,扫描时间短,使得定轴效率高,从而也提高整个检测流程的效率。
附图说明
16.图1为本发明的流程图。
17.图2为本发明的结构原理图。
具体实施方式
18.为了使本领域的技术人员更好地理解本发明的技术方案,下面结合具体实施方式对本发明作进一步的详细说明。
19.如图1所示,本发明提供一种列车定轴方法,具体包括一下步骤:s1确定列车停靠范围,将列车需要定轴的目标车轴停靠进所述停靠范围内。
20.确定列车停靠范围的作用是在通过拍摄装置拍摄车底图像时,保证有且仅有目标车轴出现在镜头中。本实施例中,该范围为沿轨道长度方向1米~1.5米。
21.s2利用拍摄装置从起始位置i按照既定的拍摄方式拍摄列车底部的2d平面图像以及3d点云图像i。
22.本发明中,所述拍摄装置包括agv(automated guided vehicle自动引导车),avg指装备有电磁或光学等自动导航装置,能够沿规定的导航路径行驶,具有安全保护以及各种移载功能的运输车。工业应用中不需要驾驶员的搬运车,以可充电的蓄电池为其动力来源。一般可通过电脑来控制其行进路径以及行为,或利用电磁轨道(electromagnetic path-following system)来设立其行进路径,电磁轨道黏贴于地板上,无人搬运车则依靠电磁轨道所带来的讯息进行移动与动作。
23.所述agv上安装有机械臂,例如六轴机械臂,活动度大。
24.所述机械臂末端固定有相机,该相机能够拍摄2d和3d的图像。
25.拍摄之前构建列车停靠范围内的环境地图并规划拍摄路线和停车点,通过示教确定机械臂拍照时的姿态。拍摄路线、停车点、机械臂拍照姿态都是固定的,从而形成既定的拍摄方式。而起始位置i就是agv的出发位置,起始位置i也是固定的。
26.在进行定轴之前,要进行标准模板的构建。同样是将agv从起始位置i出发,按照规划拍摄路线和停车点运行,然后机械臂按照示教的姿态进行拍摄获取的。拍摄标准模板时,车轴在世界坐标系下的位置是已知的。标准模板所在坐标系为拍摄标准模板时在第一拍摄点的相机坐标系,而标准模板就是将相机在所有拍摄点拍摄到的点云拼合到该坐标系而成;拼合的办法就是将其他拍摄点获得的点云通过转换矩阵转换到第一拍摄点的相机坐标系即可。
27.在定轴时的第一次拍摄需要拍摄列车底部的2d图像和3d点云图像。其中,其中3d点云图像是多个拍摄位置拍摄到的点云拼接而成。3d点云图像i所在坐标系为拍摄3d点云
图像i时在第一拍摄点的相机坐标系,而本次拍摄后续所有拍摄点拍摄到的点云图像均拼合到这个坐标系下形成一个完整的3d点云图像i。拼合方法与标准模板雷同,此处不再赘述。
28.s3利用2d平面图像划定配准区域。
29.实际上,直接通过3d点云图像i与标准模板进行配准也可以计算出车轴的位置,但是由于3d点云图像i中点云较多,配准起来系统开销巨大,因此本发明中先通过2d平面图像划定一个配准区域,这样就可以选择一些特征较为明显的区域进行配准,从而去除多余的点云,减小系统开销。
30.在一些实施例中可对拍摄区域的2d图像进行深度学习,找到特征多且明显的、确保在车轴附近的区域,然后再利用该区域的3d点云进行配准。当然,也可以人工选择配准区域。
31.s4将配准区域内的3d点云图像与标准模板进行配准,获得配准区域内的3d点云图像与标准模板之间的偏移矩阵;所述偏移矩阵为3d点云图像i所在坐标系到标准模板所在坐标系的转换矩阵。
32.由于进行定轴时的停车点与构建标准模板时的停车点不可能完全重合,因此3d点云图像i与标准模板之间也不可能是完全重合的。而所谓的偏移矩阵实际就是3d点云图像i所在坐标系到标准模板所在坐标系的转换矩阵。由于两次停车的误差一般来说只能是沿铁轨前后,因此偏移矩阵一般来说也只有平移关系而没有翻转关系。偏移矩阵的计算为3d点云领域的惯用技术,本发明中不再赘述。
33.s5利用偏移矩阵计算起始位置ii,并将拍摄装置移动到起始位置ii后再次按照既定的拍摄方式拍摄列车底部的3d点云图像ii,具体包括:s51通过偏移矩阵获取配准区域内的3d点云图像与标准模板之间的偏移量;由于偏移矩阵包含了两个坐标系之间的相对姿态,实际上已经明确了3d点云图像i与标准模板之间的偏移量。
34.s52将偏移量从模板坐标系转移到世界坐标系下;由于agv的路线包括起始位置都是在世界坐标系下的,因此需要将偏移量转移到世界坐标系下。而从模板坐标系到世界坐标系要经过中间几个坐标系的转换才能实现。
35.首先,将偏移量从标准模板所在坐标系转移到机械臂末端坐标系;标准模板所在坐标系实际就是拍摄标准模板时在第一拍摄点的相机坐标系。标准模板所在坐标系转移到机械臂末端坐标系通过转换矩阵来实现, 是一个固定的齐次变换矩阵可通过标定获得。
36.然后,将偏移量从机械臂末端坐标系转移到机械臂底座坐标系;机械臂末端坐标系转移到机械臂底座坐标系通过转换矩阵来实现, 可通过机械臂末端的位姿直接计算。
37.最后,将偏移量从机械臂底座坐标系转移到世界坐标系。从机械臂底座坐标系转移到世界坐标系通过转换矩阵来实现,可通过标定获得。
38.整个过程可通过公式进行,其中为世界坐标系下的偏移量,为标准模板所在坐标系下的偏移量。
39.s53将起始位置i在世界坐标系下的坐标减去偏移量获得起始位置ii在世界坐标系下的坐标。简而言之,假设偏移量为正方向的偏移,就向负方向移动,如果偏移量为负方向,就向正方向移动,其目的在于消除偏移。
40.avg从起始位置ii开始重新进行拍摄,拍摄方式不变即相对路线、停车点、机械臂拍摄姿态均不变,从而获得3d点云图像ii。
41.s6将3d点云图像ii与标准模板进行对比,若二者重合则认为偏移矩阵准确。同样,将3d点云图像ii中的点云转移到标准模板的坐标系下,如果二者重合就说明偏移矩阵是准确的。如果不能重合则需要重新进行步骤s2~步骤s6,直到重合为止。
42.s7通过已知的标准模板中车轴的位置以及偏移矩阵计算目标车轴的位置,具体包括:s71通过偏移矩阵获取配准区域内的3d点云图像与标准模板之间的偏移量;s72将偏移量从模板坐标系转移到世界坐标系下;s73将标准模板中车轴的在世界坐标系下的位置坐标加上偏移量获得目标车轴在世界坐标系下的位置坐标。
43.实际上,步骤s71和s72在步骤5中已经完成,只要通过步骤6中验证确认偏移矩阵的准确性后即可直接使用。标准模板中车轴在世界坐标系下的位置是已知的,通过该位置在加上偏移量即可获得目标车轴在世界坐标系下的位置坐标。
44.通过循环上述步骤,可以对列车每根车轴都进行定轴,从而获得确定列车的停靠位置及每节车厢的准确位置。
45.如图2所示,本发明还还提供一种列车定轴系统,包括:图像获取单元,用于从起始位置i按照既定的拍摄方式拍摄列车底部的2d平面图像以及3d点云图像i,从起始位置ii按照既定的拍摄方式拍摄列车底部的3d点云图像ii;配准区域划定单元,用于利用2d平面图像划定配准区域;偏移矩阵获取单元,用于将配准区域内的3d点云图像与标准模板进行配准,获得配准区域内的3d点云图像与标准模板之间的偏移矩阵;所述偏移矩阵为3d点云图像i所在坐标系到标准模板所在坐标系的转换矩阵;起始位置ii获取单元,用于利用偏移矩阵计算起始位置ii;对比单元,用于将3d点云图像ii与标准模板进行对比;车轴位置计算单元,用于通过已知的标准模板中车轴的位置以及偏移矩阵计算目标车轴的位置。
46.所述起始位置ii获取单元包括:偏移量获取单元,用于通过偏移矩阵获取配准区域内的3d点云图像与标准模板之间的偏移量;偏移量转移单元,用于将偏移量从模板坐标系转移到世界坐标系下;计算单元,用于将起始位置i在世界坐标系下的坐标减去偏移量获得起始位置ii在世界坐标系下的坐标。
47.所述车轴位置计算单元包括:偏移量获取单元,用于通过偏移矩阵获取配准区域内的3d点云图像与标准模板之间的偏移量;偏移量转移单元,用于将偏移量从模板坐标系转移到世界坐标系下;计算单元,用于将标准模板中车轴的在世界坐标系下的位置坐标加上偏移量获得目标车轴在世界坐标系下的位置坐标。
48.以上仅是本发明的优选实施方式,应当指出的是,上述优选实施方式不应视为对本发明的限制,本发明的保护范围应当以权利要求所限定的范围为准。对于本技术领域的普通技术人员来说,在不脱离本发明的精神和范围内,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。