一种多自由度调节机构
〖技术领域〗
1.本实用新型涉及工业设备领域,具体涉及一种多自由度调节机构。
〖
背景技术:
〗
2.在工业生产中,往往需要对某些机构和设备的位置、角度、方向等进行调整,以达到相应的技术目的。自由度是根据机械原理,机构具有确定运动时所必须给定的独立运动参数的数目,如果一个构件组合体的自由度f》0,他就可以成为一个机构,即表明各构件间可有相对运动;如果f=0,则它将是一个结构 (structure),即已退化为一个构件。一个实体如果在空间上完全没有被约束,那么它可以在x、y、z三个正交方向上平移运动,还可以以x、y、z三个正交方向为轴转动,即该实体具有6个自由度。
3.在锂电池刮涂设备中,极片刮涂后刮涂区域的质量检测极为重要,高清相机(ccd检测)拍照检测是检测刮涂区域是否满足预定要求的一种有效手段。相机的架设需要在满足结构稳定、调节方便的同时,使相机能进行6个自由度上的位置、角度、朝向等参数的调节,以使相机达到更佳的拍摄效果,从而使ccd 检测更准确、灵敏。现有的调节机构存在不够稳定,长期使用容易导致位置、角度改变且不易校正,可调节自由度少等问题,使相机的拍摄效果和ccd检测不够理想。
〖
技术实现要素:
〗
4.本实用新型提供一种多自由度调节机构,能够简便地调节架设于该机构上的设备的位置、角度。本实用新型的第一目的由以下技术方案实现:
5.一种多自由度调节机构,包括x平移模块、y平移模块、z平移模块、x旋转模块、y旋转模块、z旋转模块;所述y平移模块可移动地安装于外部结构上,其特征在于:所述x平移模块、z平移模块上设置有腰型孔,所述z旋转模块上设置有z模块弧形腰型孔;所述x平移模块通过x模块腰型孔可移动地安装于所述y平移模块上,所述z旋转模块通过z模块弧形腰型孔可转动地安装于所述x平移模块上,所述z平移模块安装于所述z旋转模块上,所述y旋转模块通过z模块腰型孔可移动地安装于所述z平移模块上,所述x旋转模块安装于所述y旋转模块上。
6.通过上述技术方案,可实现架设在该机构上的设备在空间x、y、z三个正交方向上的平移运动和x、y、z三个正交方向的旋转运动,实现设备在6个自由度上的位置、角度调整,且该机构的结构简单,调节方便,在工作过程中稳定性强。
7.作为本实用新型的进一步改进,所述z模块弧形腰型孔长边中心线的弧长所对的圆心角为30
°‑
120
°
。
8.作为本实用新型的进一步改进,所述z平移模块包括第一z平移块和第二z 平移块,所述第一z平移块和第二z平移块上均设置有z模块腰型孔,第一z 平移块和第二z平移块上分别位于所述y旋转模块两侧,通过所述z模块腰型孔与y旋转模块连接。
9.作为本实用新型的进一步改进,所述y旋转模块包括第一y支承块、第二y 支承块
和y旋转承载块,所述y旋转承载块上设置有y旋转轴,所述第一y支承块、第二y支承块上还设置有y旋转轴孔,第一y支承块、第二y支承块分别位于所述y旋转承载块两侧,所述y旋转轴位于所述y旋转轴孔中,将所述y 旋转承载块可转动地安装在所述第一y支承块和第二y支承块上。
10.作为本实用新型的进一步改进,所述第一y支承块和第二y支承块上还设置有y模块弧形腰型孔,所述y旋转承载块通过所述y模块弧形腰型孔与所述第一y支承块和第二y支承块连接。
11.作为本实用新型的进一步改进,所述y模块弧形腰型孔长边中心线的弧长所对的圆心角为30
°‑
120
°
。
12.作为本实用新型的进一步改进,所述x旋转模块包括第一x支承块、第二x 支承块和x旋转承载块,所述x旋转承载块上设置有x旋转轴,所述第一x支承块、第二x支承块上还设置有x旋转轴孔,第一x支承块、第二x支承块分别位于所述x旋转承载块两侧,所述x旋转轴位于所述x旋转轴孔中,将所述x 旋转承载块可转动地安装在所述第一x支承块和第二x支承块上。
13.作为本实用新型的进一步改进,所述第一x支承块和第二x支承块上还设置有x模块弧形腰型孔,所述x旋转承载块通过所述x模块弧形腰型孔与所述第一x支承块和第二x支承块连接。
14.作为本实用新型的进一步改进,所述x模块弧形腰型孔长边中心线的弧长所对的圆心角为30
°‑
120
°
。
15.作为本实用新型的进一步改进,还包括x平移电机、y平移电机、z平移电机、x旋转电机、y旋转电机、z旋转电机;所述x平移电机与所述x平移模块连接,驱动x平移模块移动;所述y平移电机与所述y平移模块连接,驱动y 平移模块移动;所述z旋转电机与所述z旋转模块连接,驱动所述z旋转模块转动;所述z平移电机和y旋转电机与所述y旋转模块连接,所述z平移电机驱动所述y旋转模块移动,所述y旋转电机驱动所述y旋转模块转动;所述x 旋转电机与所述x旋转模块连接,驱动所述x旋转模块转动。
〖附图说明〗
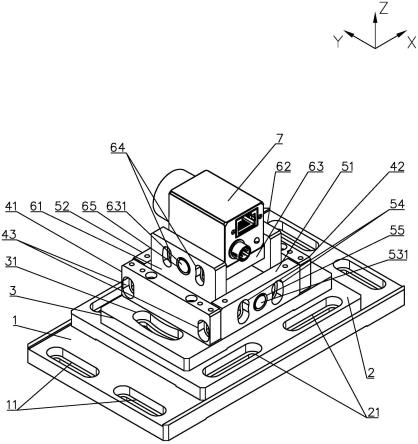
16.图1为本实用新型实施例一提供的多自由度调节机构的立体图。
17.图2为本实用新型实施例一提供的多自由度调节机构的爆炸图。
〖具体实施方式〗
18.下面结合附图对本实用新型的具体实施方式作进一步说明,为了便于说明,本技术中可能会对上、下、左、右、前、后等方位进行定义,旨在便于清楚地描述构造的相对位置关系,并不用于产品在生产、使用、销售等过程中实际方位的限制。下面结合附图对本实用新型的具体实施方式作进一步说明:
19.实施例一
20.请参阅图1、图2,本实施例提供一种多自由度调节机构,并在所述调节机构上架设相机7,所述调节机构包括y平移模块1、x平移模块2、z旋转模块3、 z平移模块、y旋转模块、x旋转模块。
21.所述y平移模块1为矩形铝合金块,在所述y平移模块1的与y轴平行的两条边附近分别设置有2个y模块腰型孔11,所述y模块腰型孔11为阶梯通孔。
22.所述x平移模块2为矩形铝合金块,在所述x平移模块2的与x轴平行的两条边附近分别设置有2个x模块腰型孔21,所述x模块腰型孔21为阶梯通孔。将所述x平移模块2居中放置于所述y平移模块1上,在所述y平移模块1上与每个所述x模块腰型孔21形心对应的位置设置有螺纹孔(作为其他可实现的技术方案,所述螺纹孔也可以是销孔等,下同)。
23.所述z旋转模块3为矩形铝合金块,在所述z旋转模块3的与y轴平行的两条边附近分别设置有1个z模块弧形腰型孔31(所述z模块弧形腰型孔31为腰型孔的长边中心线呈弧形,y模块弧形腰型孔、x模块弧形腰型孔同理),所述z模块弧形腰型孔31为阶梯通孔,弧度为90
°
。将所述z旋转模块3居中放置于所述x平移模块2上,在所述x平移模块2上与每个所述z模块弧形腰型孔31形心对应的位置设置有螺纹孔。
24.所述z平移模块包括为矩形铝合金块的第一z平移块41和第二z平移块42,所述第一z平移块41和第二z平移块42上分别在与z轴平行的两条边附近分别设置有2个z模块腰型孔43,所述z模块腰型孔43为阶梯通孔。
25.所述y旋转模块包括为矩形铝合金块的第一y支承块51、第二y支承块52 和y旋转承载块53。所述第一y支承块51、第二y支承块52上分别设置有2 个y模块弧形腰型孔54,所述y模块弧形腰型孔54为阶梯通孔,弧度为90
°
,第一y支承块51、第二y支承块52上的两个端部上还分别设置有螺纹孔。在2 个y模块弧形腰型孔54之间设置有y旋转轴孔55。所述y旋转承载块53上设置有2个y旋转轴531,所述y旋转轴531通过轴承安装在所述第一y支承块 51、第二y支承块52的y旋转轴孔55中。在所述y旋转承载块53上与每个所述y模块弧形腰型孔54形心对应的位置设置有螺纹孔,通过在螺纹孔中安装螺栓,以限制所述y旋转承载块53的旋转角度。
26.所述x旋转模块包括为矩形铝合金块的第一x支承块61、第二x支承块62 和x旋转承载块63。所述第一x支承块61、第二x支承块62上分别设置有2 个x模块弧形腰型孔64,所述x模块弧形腰型孔64为阶梯通孔,弧度为90
°
所述第一x支承块61、第二x支承块62上的底部还分别设置有螺纹孔。在2个 x模块弧形腰型孔64之间设置有x旋转轴孔65。所述x旋转承载块63上设置有2个x旋转轴631,所述x旋转轴631通过轴承安装在所述第一x支承块61、第二x支承块62的x旋转轴孔65中。在所述x旋转承载块63上与每个所述x 模块弧形腰型孔64形心对应的位置设置有螺纹孔,通过在螺纹孔中安装螺栓,以限制所述x旋转承载块63的旋转角度。
27.所述y平移模块1通过穿过所述y模块腰型孔11的螺栓可移动地安装在外部结构上;所述x平移模块2通过穿过所述x模块腰型孔21的螺栓可移动地安装在所述y平移模块1上;所述z旋转模块3通过穿过所述z模块弧形腰型孔 31的螺栓可转动地安装在所述x平移模块2上;所述z平移模块的第一z平移块41和第二z平移块42固定安装于所述z旋转模块3上;所述y旋转模块的第一y支承块51的两个端部、第二y支承块52的两个端部分别通过穿过所述第一z平移块41、第二z平移块上42的z模块腰型孔44的螺栓可移动地安装在所述z平移模块上;所述x旋转模块的第一x支承块61、第二x支承块62固定安装于所述y旋转模块的y旋转承载块53上。
28.相机7可固定架设于所述x旋转模块的x旋转承载块63上。所述y平移模块1可在外
部结构上带动所述x平移模块2、z旋转模块3、z平移模块、y旋转模块、x旋转模块和相机7沿y轴方向做平移运动;所述x平移模块2可在所述 y平移模块1上带动所述z旋转模块3、z平移模块、y旋转模块、x旋转模块和相机7沿x轴方向做平移运动;所述z旋转模块3可在所述x平移模块2上带动所述z平移模块、y旋转模块、x旋转模块和相机7绕z轴做旋转运动;所述 y旋转模块可在所述z平移模块上带动所述x旋转模块和相机7沿z轴方向做平移运动;所述x旋转模块可在所述y旋转模块上带动相机7绕y轴做旋转运动,所述相机7可在所述x旋转模块上绕x轴做旋转运动。
29.通过所述x平移模块2、y平移模块1、z平移模块、x旋转模块、y旋转模块、z旋转模块3的组合,可实现所述相机7在空间x、y、z三个正交方向上平移运动,还可以以x、y、z三个正交方向为轴转动,实现6个自由度上的位置、角度调整。且本实用新型的所有构件均采用截面为矩形的铝合金型材通过简单加工构建而成,大部分构件间的均为面接触,提高了角度调节机构在工作过程中的稳定性。
30.实施例二
31.本实施例提供一种多自由度调节机构,在实施例一所提供的调节机构的基础上,还包括x平移电机、y平移电机、z平移电机、x旋转电机、y旋转电机、 z旋转电机。
32.所述x平移电机与所述x平移模块连接,驱动x平移模块移动;所述y平移电机与所述y平移模块连接,驱动y平移模块移动;所述z旋转电机与所述z 旋转模块连接,驱动所述z旋转模块转动;所述z平移电机和y旋转电机与所述y旋转模块连接,所述z平移电机驱动所述y旋转模块移动,所述y旋转电机驱动所述y旋转模块转动;所述x旋转电机与所述x旋转模块连接,驱动所述x旋转模块转动。
33.通过x平移电机、y平移电机、z平移电机、x旋转电机、y旋转电机、z旋转电机带动所述调节机构的平移、旋转动作,实现对架设在所述调节机构上的设备的位置、角度调节,使调节更加便捷、精确。
34.以上实施例仅为充分公开而非限制本实用新型,凡基于本实用新型的创作主旨、无需经过创造性劳动即可得到的等效技术特征的替换,应当视为本技术揭露的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。