1.本发明涉及焊接生产线技术领域,尤其是涉及一种用于焊接岛的混合导航移动机器人。
背景技术:
2.随着市场需求的变化,消费者越来越追求个性化的产品,导致产品的种类型号越来越多。生产的件数不断变化,导致了大规模的定制;焊装车间的岛式生产也是现在各大主机厂考虑的未来方向。各岛之间的自动化专用也是随之带来的技术需求。
3.现在amr(自主移动机器人)技术发展迅速,各种技术日益成熟。但是单一导航技术很难应用于精度高、工况差的场合;以及整体结构的车体下部结构难以保证在不平整工厂地面上的舵轮抓地力,稳定可靠性差。
技术实现要素:
4.针对现有技术不足,本发明所要解决的技术问题是提供一种用于焊接岛的混合导航移动机器人,以达到稳定可靠的目的。
5.为了解决上述技术问题,本发明所采用的技术方案为:
6.该用于焊接岛的混合导航移动机器人,包括车体和设在车体下方的一组舵轮和万向轮,所述车体的下部设有车体固定轮架和车体活动轮架,所述车体固定轮架和车体活动轮架上均设有舵轮和万向轮,所述车体活动轮架通过摆动桥活动设在车体固定轮架上。
7.进一步的:
8.所述车体的下部拐角处均设有液压支撑腿。
9.所述车体固定轮架固定在车体的下部,车体固定轮架上设有一个舵轮和一个万向轮,车体活动轮架上设有一个舵轮和一个万向轮,两个舵轮对角布置。
10.所述车体固定轮架和车体活动轮架均为框架结构,所述车体活动轮架设在车体固定轮架框架内。
11.所述摆动桥的端部通过轴承设在车体固定轮架上。
12.所述车体固定轮架的一侧设有长方形空间,车体活动轮架设在长方形空间内,车体活动轮架上舵轮和万向轮靠相对两端设置。
13.所述车体活动轮架为长方形框架结构,车体活动轮架的两端部均设有安装板,车体活动轮架上的舵轮和万向轮安装在对应端的安装板上。
14.还包括控制器以及用于导航的混合激光slam、惯性导航以及码带导航。
15.所述车体上设有用于检测夹具的夹具检测传感器和用于产生避障信号的避障传感器,所述夹具检测传感器和避障传感器均与控制器相连。
16.本发明与现有技术相比,具有以下优点:
17.该用于焊接岛的混合导航移动机器人设计合理,采用两个舵轮驱动,两个承载万向轮;车体活动轮架可根据地面摆动适应调整,提高舵轮抓地力;通过设置液压支撑腿缓解
对舵轮的冲击力,稳定可靠;采用混合激光slam、惯性导航以及码带导航可有效提高精度,能适用工况差的应用场合。
附图说明
18.下面对本说明书各幅附图所表达的内容及图中的标记作简要说明:
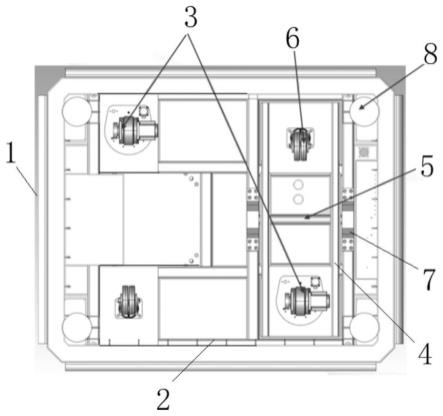
19.图1为本发明车体结构示意图。
20.图2为本发明电气系统示意图。
21.图3为本发明调度系统示意图。
22.图4为本发明工艺应用示意图。
23.图中:
24.1.车体、2.车体固定轮架、3.舵轮、4.车体活动轮架、5.摆动桥、6.万向轮、 7.轴承、8.液压支撑腿。
具体实施方式
25.下面对照附图,通过对实施例的描述,对本发明的具体实施方式作进一步详细的说明。
26.如图1至图4所示,该用于焊接岛的混合导航自主移动机器人,包括车体1 和设在车体下方的一组舵轮3和万向轮6,车体的下部设有车体固定轮架2和车体活动轮架4,车体固定轮架和车体活动轮架上均设有舵轮和万向轮,车体活动轮架通过摆动桥5活动设在车体固定轮架上。
27.车体固定轮架2固定在车体的下部,车体固定轮架上设有一个舵轮和一个万向轮,车体活动轮架4上设有一个舵轮和一个万向轮,两个舵轮对角布置;采用两个舵轮对角设置,两个承载万向轮对角设置,车体活动轮架可根据地面摆动适应调整,提高舵轮抓地力,稳定可靠。
28.为克服夹具工装落下的冲击力,四个角设置四个液压支撑腿8,缓解舵轮受到冲击力,稳定可靠;具体为,车体的下部拐角处均设有液压支撑腿,液压支撑腿设置在车体固定轮架拐角外侧。
29.车体固定轮架2和车体活动轮架4均为框架结构,车体活动轮架设在车体固定轮架框架内;摆动桥5设在车体活动轮架上,摆动桥的端部通过轴承7设在车体固定轮架上,结构紧凑。
30.车体固定轮架的一侧设有长方形空间,车体活动轮架设在长方形空间内,车体活动轮架上舵轮和万向轮靠相对两端设置;进一步的,车体活动轮架为长方形框架结构,车体活动轮架的两端部均设有安装板,车体活动轮架上的舵轮和万向轮安装在对应端的安装板上。
31.本发明还包括控制器以及与控制器均相连用于导航的混合激光slam、惯性导航以及码带导航,形成复合导航系统;进一步的,车体上设有用于检测夹具的夹具检测传感器和用于产生避障信号的避障传感器,夹具检测传感器和避障传感器均与控制器相连。采用混合激光slam、惯性导航以及码带导航形成复合导航系统可有效提高精度,能适用工况差的应用场合。
32.上述仅为对本发明较佳的实施例说明,上述技术特征可以任意组合形成多个本发明的实施例方案。
33.上面结合附图对本发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的构思和技术方案进行的各种非实质性的改进,或未经改进将本发明的构思和技术方案直接应用于其它场合的,均在本发明的保护范围之内。
技术特征:
1.一种用于焊接岛的混合导航移动机器人,包括车体和设在车体下方的一组舵轮和万向轮,其特征在于:所述车体的下部设有车体固定轮架和车体活动轮架,所述车体固定轮架和车体活动轮架上均设有舵轮和万向轮,所述车体活动轮架通过摆动桥活动设在车体固定轮架上。2.如权利要求1所述用于焊接岛的混合导航移动机器人,其特征在于:所述车体的下部拐角处均设有液压支撑腿。3.如权利要求1所述用于焊接岛的混合导航移动机器人,其特征在于:所述车体固定轮架固定在车体的下部,车体固定轮架上设有一个舵轮和一个万向轮,车体活动轮架上设有一个舵轮和一个万向轮,两个舵轮对角布置。4.如权利要求1所述用于焊接岛的混合导航移动机器人,其特征在于:所述车体固定轮架和车体活动轮架均为框架结构,所述车体活动轮架设在车体固定轮架框架内。5.如权利要求1所述用于焊接岛的混合导航移动机器人,其特征在于:所述摆动桥的端部通过轴承设在车体固定轮架上。6.如权利要求4所述用于焊接岛的混合导航移动机器人,其特征在于:所述车体固定轮架的一侧设有长方形空间,车体活动轮架设在长方形空间内,车体活动轮架上舵轮和万向轮靠相对两端设置。7.如权利要求6所述用于焊接岛的混合导航移动机器人,其特征在于:所述车体活动轮架为长方形框架结构,车体活动轮架的两端部均设有安装板,车体活动轮架上的舵轮和万向轮安装在对应端的安装板上。8.如权利要求1所述用于焊接岛的混合导航移动机器人,其特征在于:还包括控制器以及用于导航的混合激光slam、惯性导航以及码带导航。9.如权利要求8所述用于焊接岛的混合导航移动机器人,其特征在于:所述车体上设有用于检测夹具的夹具检测传感器和用于产生避障信号的避障传感器,所述夹具检测传感器和避障传感器均与控制器相连。
技术总结
本发明公开了一种用于焊接岛的混合导航移动机器人,包括车体和设在车体下方的一组舵轮和万向轮,所述车体的下部设有车体固定轮架和车体活动轮架,所述车体固定轮架和车体活动轮架上均设有舵轮和万向轮,所述车体活动轮架通过摆动桥活动设在车体固定轮架上。该用于焊接岛的混合导航移动机器人设计合理,采用两个舵轮驱动,两个承载万向轮;车体活动轮架可根据地面摆动适应调整,提高舵轮抓地力;通过设置液压支撑腿缓解对舵轮的冲击力,稳定可靠;采用混合激光SLAM、惯性导航以及码带导航可有效提高精度,能适用工况差的应用场合。能适用工况差的应用场合。能适用工况差的应用场合。
技术研发人员:胡超 叶朝国 徐俊 吴守军 卜祖超
受保护的技术使用者:安徽瑞祥工业有限公司
技术研发日:2022.10.25
技术公布日:2022/12/9
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。