技术特征:
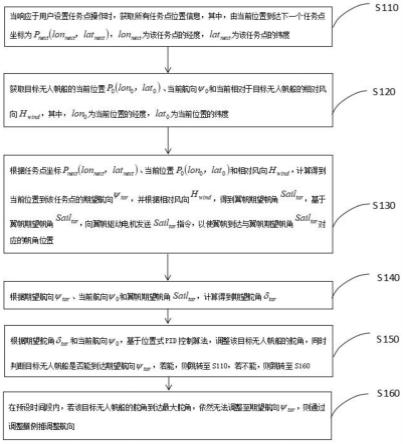
1.一种基于翼帆和舵联动的无人帆船航向控制方法,其特征在于,包括如下步骤:s110:当响应于用户设置任务点操作时,获取所有任务点位置信息,其中,由当前位置到达下一个任务点坐标为p
next
(lon
next
,lat
next
),lon
next
为该任务点的经度,lat
next
为该任务点的纬度;s120:获取目标无人帆船的当前位置p0(lon0,lat0)、当前航向ψ0和当前相对于所述目标无人帆船的相对风向h
wind
,其中,lon0为当前位置的经度,lat0为当前位置的纬度;s130:根据所述任务点坐标p
next
(lon
next
,lat
next
)、所述当前位置p0(lon0,lat0)和所述相对风向h
wind
,计算得到所述当前位置到该任务点的期望航向ψ
tar
,并根据所述相对风向h
wind
,得到翼帆期望帆角sail
tar
,基于所述翼帆期望帆角sail
tar
,向翼帆驱动电机发送sail
tar
指令,以使翼帆到达与所述翼帆期望帆角sail
tar
对应的帆角位置;s140:根据所述期望航向ψ
tar
、所述当前航向ψ0和所述翼帆期望帆角sail
tar
,计算得到期望舵角δ
tar
;s150:根据所述期望舵角δ
tar
和所述当前航向ψ0,基于位置式pid控制算法,调整该目标无人帆船的舵角,同时判断所述目标无人帆船是否能到达期望航向ψ
tar
,若能,则跳转至s110,若不能,则跳转至s160;s160:在预设时间段内,若该目标无人帆船的舵角到达最大舵角,依然无法调整至期望航向ψ
tar
,则通过调整艏侧推调整航向。2.根据权利要求1所述的基于翼帆和舵联动的无人帆船航向控制方法,其特征在于,根据所述任务点坐标p
next
(lon
next
,lat
next
)、所述当前位置p0(lon0,lat0)和所述相对风向h
wind
,计算得到所述当前位置到该任务点的期望航向ψ
tar
的步骤包括:利用公式计算目标无人帆船的当前位置p0(lon0,lat0)到任务点p
next
(lon
next
,lat
next
)的期望航向ψ
tar
,其中,当相对风向h
wind
为[0
°
, 30
°
]时,ψ
tar
= 30
°
,当相对风向h
wind
为[-30
°
,0
°
]时,ψ
tar
=-30
°
。3.根据权利要求1所述的基于翼帆和舵联动的无人帆船航向控制方法,其特征在于,根据所述相对风向h
wind
,得到翼帆期望帆角sail
tar
的步骤包括:获取相对风向与翼帆帆角的关系对应表;根据所述关系对应表和所述相对风向h
wind
,得到翼帆期望帆角sail
tar
。4.根据权利要求1所述的基于翼帆和舵联动的无人帆船航向控制方法,其特征在于,根据所述期望航向ψ
tar
、所述当前航向ψ0和所述翼帆期望帆角sail
tar
,计算得到期望舵角δ
tar
的步骤包括:将翼帆受力f2分解为为目标无人帆船提供前进动力的力f
2y
=f2×
cos(sail
tar
)和使目标无人帆船偏离当前航向的转向力f
2x
=f2×
sin(sail
tar
),并基于所述转向力,得到使目标无人帆船偏离当前航向的转向力矩m2=f
2x
×
sin(sail
tar
)
×
l2,其中,l2为翼帆施力点到目标无人帆船船体重心的距离;将舵受力f3进行分解后,得到舵使目标无人帆船偏离当前航向的转向力矩m3=f
3x
×
cos(δ
tar
)
×
l3,其中,f
3x
为分解舵受力f3得到的舵使目标无人帆船偏离当前航向的转向力,l3为舵施力点到目标无人帆船船体重心的距离;根据目标无人帆船航向的力矩平衡,则m2 m3=0;根据m2=f
2x
×
sin(sail
tar
)
×
l2、m3=f
3x
×
cos(δ
tar
)
×
l3和m2 m3=0,得到期望舵角δ
tar
。
5.根据权利要求1所述的基于翼帆和舵联动的无人帆船航向控制方法,其特征在于,根据所述期望舵角δ
tar
和所述当前航向ψ0,基于位置式pid控制算法,调整该目标无人帆船的舵角,同时判断所述目标无人帆船是否能到达期望航向ψ
tar
的步骤包括:通过位置式pid控制算法,根据公式e=ψ
tar-ψ0调整目标无人帆船的舵角e,同时根据公式计算得到舵角控制量δ(n),其中,δ(n)为第n个采样时刻pid调节单元的输出量即舵角控制量,e(n)为第n个采样时刻的输入单元获得实际偏差量,k
p
为比例系数,k
i
为积分系数,k
d
为微分系数,δ为翼帆受力因子,v
wind
为当前风速,l2为翼帆施力点到目标无人帆船船体重心的距离;根据所述舵角控制量调整所述目标无人帆船的舵角的同时,判断所述目标无人帆船是否能到达期望航向ψ
tar
。6.根据权利要求1所述的基于翼帆和舵联动的无人帆船航向控制方法,其特征在于,所述s160的步骤包括:若通过调整艏侧推调整航向,则m1 m2 m3=0,且目标无人帆船的舵角为满舵δ
max
,m2值、翼帆帆角和m3值均固定,其中,m1为目标无人帆船艏侧推为该目标无人帆船提供的艏摇力矩,m2为翼帆使目标无人帆船偏离当前航向的转向力矩,m3为舵使目标无人帆船偏离当前航向的转向力矩;通过pid控制算法,根据公式e=ψ
tar-ψ0和公式调节目标无人帆船的航向,其中,u(n)为第n个采样时刻pid调节单元的输出量即为艏侧推的电机转速,e(n)为第n个采样时刻的输入单元获得实际偏差量,k
p
为比例系数,k
i
为积分系数,k
d
为微分系数。7.根据权利要求1所述的基于翼帆和舵联动的无人帆船航向控制方法,其特征在于,所述s110的步骤之前,还包括:对目标无人帆船的所有设备依次进行上电和运行检查,以完成各个设备的初始化。8.一种基于翼帆和舵联动的无人帆船航向控制系统,其特征在于,包括:任务点设置模块,用于当响应于用户设置任务点操作时,获取所有任务点位置信息,其中,由当前位置到达下一个任务点坐标为p
next
(lon
next
,lat
next
),lon
next
为该任务点的经度,lat
next
为该任务点的纬度;位置获取模块,用于获取目标无人帆船的当前位置p0(lon0,lat0)、当前航向ψ0和当前相对于所述目标无人帆船的相对风向h
wind
,其中,lon0为当前位置的经度,lat0为当前位置的纬度;期望航向计算模块,用于根据所述任务点坐标p
next
(lon
next
,lat
next
)、所述当前位置p0(lon0,lat0)和所述相对风向h
wind
,计算得到所述当前位置到该任务点的期望航向ψ
tar
,并根据所述相对风向h
wind
,得到翼帆期望帆角sail
tar
,基于所述翼帆期望帆角sail
tar
,向翼帆驱动电机发送sail
tar
指令,以使翼帆到达与所述翼帆期望帆角sail
tar
对应的帆角位置;期望舵角计算模块,用于根据所述期望航向ψ
tar
、所述当前航向ψ0和所述翼帆期望帆角sail
tar
,计算得到期望舵角δ
tar
;
舵角调整模块,用于根据所述期望舵角δ
tar
和所述当前航向ψ0,基于位置式pid控制算法,调整该目标无人帆船的舵角,同时判断所述目标无人帆船是否能到达期望航向ψ
tar
,若能,则跳转至任务点设置模块,若不能,则跳转至艏侧推调整模块;艏侧推调整模块,用于在预设时间段内,若该目标无人帆船的舵角到达最大舵角,依然无法调整至期望航向ψ
tar
,则通过调整艏侧推调整航向。9.一种电子设备,其特征在于,包括:存储器,用于存储一个或多个程序;处理器;当所述一个或多个程序被所述处理器执行时,实现如权利要求1-7中任一项所述的方法。10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该计算机程序被处理器执行时实现如权利要求1-7中任一项所述的方法。
技术总结
本发明提出了一种基于翼帆和舵联动的无人帆船航向控制方法及系统,涉及航海技术领域。该方法包括:获取所有任务点位置信息。获取并根据目标无人帆船的当前位置、当前航向和相对风向,计算期望航向和翼帆期望帆角。根据期望航向、当前航向和翼帆期望帆角,计算期望舵角。根据期望舵角和当前航向,调整该目标无人帆船的舵角,同时判断目标无人帆船是否能到达期望航向。在预设时间段内,若该目标无人帆船的舵角到达最大舵角,依然无法调整至期望航向,则通过调整艏侧推调整航向。从而通过将无人帆船的翼帆帆角与舵耦合控制,并增加艏侧推,弥补舵机艏摇力矩不足的情况,提高了鲁棒性和运算速度,增加了航向控制的精度和航向保持性能。持性能。持性能。
技术研发人员:胡井侠
受保护的技术使用者:东翼长启科技(重庆)有限公司
技术研发日:2022.10.11
技术公布日:2022/12/9
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。