1.本发明涉及医疗器械技术领域,尤其涉及一种新型手术机器人系统用末端装置。
背景技术:
2.随着手术机器人技术的发展,在进行不同术种或复杂手术时需要根据手术的操作要求进行更换不同的末端工具。在当前单一术种的情况下,对器械末端工具的要求较低,操作者一般通过肉眼识别使用的器械末端工具型号进行更换。但随着手术机器人系统应用术种的增加,器械末端工具越来越丰富,如何快速准确地对器械末端工具进行安装和识别成为当前手术机器人系统亟需解决的技术问题。当前手术导航系统一般采用光学导航和电磁导航两种方式,当采用光学导航的方式时,可以通过识别标识图案进行末端工具的辨识,针对这个问题,也有部分厂家展开了研究。
3.例如,发明专利申请cn113974837a公开了一种末端工具的识别系统、方法、末端工具和手术机器人系统,其在末端工具表面制作粗糙度不同的标识图案,利用图像获取装置获取标识图案对末端工具进行识别。但该识别系统的缺点在于:只能利用具有光学导航功能的手术机器人系统当中。当手术机器人系统采用电磁导航系统的方式进行手术导航时,如果通过标识图案进行识别,则需要额外在现有的设备上添加图像获取装置,无疑增加了设备数量,也增加了设备成本,尤其是会对手术室这种空间要求比较严格的环境造成负担。
4.又例如,实用新型专利cn215839271u公开了一种电动腔镜吻合器组件自动识别装置及电动腔镜吻合器,其通过在母端和子端分别使用可导电的识别组件进行组件识别,虽然使用这种方式解决了子端的自动识别问题,但却同时带来了末端组件在实际使用过程中消毒灭菌的问题。如果末端组件采用高温消毒等消毒方式进行消毒,可能会导致末端组件内的导电元器件损坏,影响末端组件的正常使用,增加了使用风险。
5.为此,本技术人经过有益的探索和研究,找到了解决上述问题的方法,下面将要介绍的技术方案便是在这种背景下产生的。
技术实现要素:
6.本发明所要解决的技术问题在于:针对现有技术的不足而提供一种可快速智能识别不同器械末端工具、便于灭菌消毒、安装便利的新型手术机器人系统用末端装置。
7.本发明所要解决的技术问题可以采用如下技术方案来实现:
8.一种新型手术机器人系统用末端装置,包括母端控制模块以及可拆卸地安装在所述母端控制模块上的子端工具模块;其特征在于,所述母端控制模块朝向所述子端工具模块的端面上间隔开设有若干定位孔,所述子端工具模块朝向所述母端控制模块的端面上间隔设置有若干用于对手术工具型号进行标识的定位支柱;当所述子端工具模块上的若干定位支柱插入至所述母端控制模块上的若干定位孔内时,所述母端控制模块通过判断插入的若干定位支柱的布局样式和/或长度来识别所述子端工具模块的手术工具型号。
9.在本发明的一个优选实施例中,所述母端控制模块包括:
10.母端壳体,所述母端壳体朝向所述子端工具模块的端面上间隔开设有所述若干定位孔;
11.安装在所述母端壳体的每一定位孔内的用于对所述定位支柱的长度进行检测的长度检测单元;
12.安装在所述母端壳体内且分别与每一长度检测单元连接的信号采集单元;以及
13.安装在所述母端壳体内且与所述信号采集单元连接并与手术机器人系统连接的控制单元。
14.在本发明的一个优选实施例中,每一长度检测单元包括若干光电传感器,所述若干光电传感器沿轴向间隔设置在对应的定位孔内且分别与所述信号采集单元连接。
15.在本发明的一个优选实施例中,每一长度检测单元为设置在对应的定位孔内的位移传感器。
16.在本发明的一个优选实施例中,每一定位孔的深度相等。
17.在本发明的一个优选实施例中,在所述母端壳体的外周面上设置有一与所述控制单元连接的驱动控制按键。
18.在本发明的一个优选实施例中,在所述母端壳体的外周面上设置有与所述控制单元连接的环绕式提醒灯带。
19.在本发明的一个优选实施例中,在所述母端壳体朝向所述子端工具模块的端面的周缘处设置有缝隙密封条。
20.在本发明的一个优选实施例中,所述缝隙密封条采用硅胶制成。
21.在本发明的一个优选实施例中,所述子端工具模块包括:
22.子端壳体,所述子端壳体朝向所述母端控制模块的端面上间隔设置有所述若干定位支柱;以及
23.手术工具,所述手术工具设置在所述子端壳体背离所述母端控制模块的端面上。
24.在本发明的一个优选实施例中,所述子端工具模块上的若干定位支柱通过不同的布局样式和/或长度标识不同的手术工具型号;在识别时,通过识别若干定位支柱的布局样式来判断手术工具的术种;当术种相同时,通过识别定位支柱的长度来判断同一术种工具下的不同的手术工具型号。
25.在本发明的一个优选实施例中,在所述子端壳体朝向所述母端控制模块的端面上设置有绝缘隔离层,所述若干定位支柱穿过所述绝缘隔离层后向外延伸。
26.在本发明的一个优选实施例中,所述绝缘隔离层采用尼龙材料或peek材料制成。
27.在本发明的一个优选实施例中,在所述子端壳体与母端壳体之间的连接处设置有用于将所述子端壳体与母端壳体进行紧固的紧固组件。
28.由于采用了如上技术方案,本发明的有益效果在于:
29.1.本发明的末端装置可安装在手术机器人的机械臂上实现智能识别,不仅适用于常用的串联结构的单机械臂手术机器人,也可以适用在多臂的主从遥操作手术机器人上。通过本发明的安装方式,不用增加额外的图像扫描装置,在减少系统部件的同时也有利于设备在空间有限的手术室中进行摆放;
30.2.本发明通过定位孔和定位支柱在不同的布局样式和/或长度的设计,可以实现不同术种和型号的子端安装,同时具有防呆功能;
31.3.本发明的子端工具模块被设计成无源结构的连接件,因此可以采用高温高压的消毒方式进行消毒,不必担心多次消杀操作对子端工具模块造成损害,同时子端工具模块可多次使用,延长了子端工具模块的使用寿命,间接地降低了患者的手术费用;
32.4.本发明将传感器、信号采集单元、驱动控制按键、控制模块、提醒灯带等都可集成在母端控制模块上,方便母端结构的设计,在视觉上也便于提醒操作者发现问题,因此整个设计也更加符合人机工程学的原理,更加便于操作者进行操作。同时,母端控制模块和子端工具模块采用分离设计,通过对母端控制模块和子端工具模块采用不同的灭菌消毒方式进行消毒,保证手术中的无菌环境,从而保证患者的手术安全;
33.5.本发明的子端工具模块采用绝缘隔离层的设计,也保证与手术机器人本体部分实现电气绝缘隔离的作用,起到了安全保护的作用;
34.6.本发明在安装完成后通过紧固组件进行紧固,保证母端控制模块与子端工具模块的连接稳定性。
附图说明
35.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
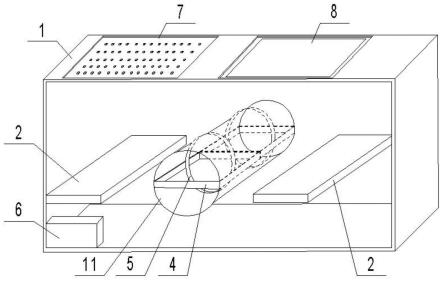
36.图1是本发明的结构示意图。
37.图2是本发明的电气原理示意图。
38.图3是本发明的母端控制模块的结构示意图。
39.图4是本发明的母端控制模块的定位孔部分的剖视图。
40.图5是本发明的子端工具模块的结构示意图。
41.图6a-图6c是本发明的子端工具模块的三种布局样式的示意图。
具体实施方式
42.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体图示,进一步阐述本发明。
43.参见图1,图中给出的是一种新型手术机器人系统用末端装置,包括母端控制模块100以及可拆卸地安装在母端控制模块100上的子端工具模块200。
44.参见图3并结合图2,母端控制模块100包括母端壳体110、若干长度检测单元120、信号采集单元130以及控制单元140。
45.母端壳体110呈圆柱状结构,其朝向子端工具模块200的端面101上间隔开设有若干定位孔111,每一定位孔111的深度相等。母端壳体110背离子端工具模块200的端面102通过螺丝等紧固件固定安装在手术机器人的机械臂末端法兰20上。
46.若干长度检测单元120对应地安装在母端壳体110的若干定位孔111内,其用于对定位支柱的长度进行检测。在本实施例中,参见图4,长度检测单元120包括若干光电传感器121,若干光电传感器121沿轴向间隔设置在对应的定位孔111内且分别与信号采集单元130连接。当外界物品(定位支柱)进入定位孔111时,随着距离的深入使得光电传感器121的信
号发生相应变化,通过传感信号的变化来判断进入物品(定位支柱)的长度。当然,除了采用光电传感器之外,长度检测单元120也可以为设置在对应的定位孔111内的位移传感器,又或者为其他类型的传感元器件。
47.信号采集单元130安装在母端壳体110内且分别与每一长度检测单元120连接,其用于采集每一长度检测单元120检测到的传感信号。信号采集单元130包括光耦隔离器和运算放大电路,长度检测单元120检测到的传感信号先经过光耦隔离器进行隔离处理,再经过运算放大电路进行放大处理后输出。
48.控制单元140安装在母端壳体110内且与信号采集单元130连接并与手术机器人系统10连接,其用于接收信号采集单元130采集到的传感信号,并对接收到的传感信号进行判断识别处理,再将判断识别结果传送至手术机器人系统10。控制单元140采用单片机作为控制器,其包括处理芯片、供电模块、模数转换输入电路、数模转换输出电路等组件。在本实施例中,控制单元140优选地采用stm32系列单片机。
49.在母端壳体110的外周面103上设置有一与控制单元140连接的驱动控制按键150,操作者通过该驱动控制按键150可以随时根据手术现场的环境对手术机器人的机械臂进行控制。这种操作模式相对于脚踏开关操作模式而言,更加符合人机工程学的原理。当按下驱动控制按键150后,手术机器人的机械臂处于自由驱动模式,在该模式下,操作者可以随意拖动机械臂进行运动控制,便于操作,在异常条件时也可以起到保护患者的作用。
50.在母端壳体110的外周面103上设置有与所述控制单元连接的环绕式提醒灯带160,环绕式提醒灯带160可以显示红色或绿色进行状态指示,红色代表了当前设备异常情况,绿色代表当前设备正常。通过环绕式提醒灯带160的光带提醒可以使得手术医生更加直观地实时了解当前设备的运行状态。
51.在母端壳体110朝向所述子端工具模块的端面101的周缘处设置有缝隙密封条(图中未示出),缝隙密封条采用硅胶制成,起到密封隔离的作用,避免在手术工程中母端控制模块100与子端工具模块200之间的连接处进入液体或者杂物。
52.参见图5并结合图1,子端工具模块200包括子端壳体210以及手术工具220。
53.子端壳体210呈圆柱状结构,其朝向母端控制模块100的端面201上间隔设置有若干定位支柱211。手术工具220设置在子端壳体210背离母端控制模块100的端面202上。
54.子端壳体210上的若干定位支柱110用于对手术工具型号进行标识,其通过不同的布局样式和/或长度标识不同的手术工具型号;在识别时,通过识别若干定位支柱的布局样式来判断手术工具的术种;当术种相同时,通过识别定位支柱的长度来判断同一术种工具下的不同的手术工具型号。例如,参见6a和图6b,通过不同的定位支柱布局进行手术工具的辨识,可实现不同术种工具的辨识。参见图6a和6c,虽然定位支柱的位置分布相同,但是由于采用不同长度的定位支柱,则会在不同的支柱插入定位孔后使得不同数量的光电传感器信号发生改变,从而实现不同的信号编码,从而使不同的末端产生不同的辨识信号。
55.通过以上辨识方式,子端工具模块200可以加工成一个无源器件,通过使用316l等金属材质进行加工后,子端工具模块200可以在高温高压环境或者等离子等下进行消毒,不必担心消毒时带来的器件损害,延长了部件的使用寿命,间接地降低了患者的手术费用。
56.在子端壳体210朝向母端控制模块100的端面201上设置有绝缘隔离层230,若干定位支柱211穿过绝缘隔离层230后向外延伸,绝缘隔离层230采用尼龙材料或peek材料制成,
起到电气绝缘隔离的作用,以防止手术机器人本体部分发生带电故障时发生导电而传到末端部分。
57.为了保证子端壳体210与母端壳体110之间的稳固连接,可在子端壳体210与母端壳体110之间的连接处设置有用于将子端壳体210与母端壳体110进行紧固的紧固组件(图中未示出),紧固组件可以采用卡扣式连接组件,也可以采用其他方式的紧固组件。
58.当子端工具模块200上的若干定位支柱121插入至母端控制模块100上的若干定位孔111内时,使得相应的定位孔111内的若干光电传感器121被触发,光电传感器121产生的传感信号传送至信号采集单元130,信号采集单元130采集每一长度检测单元120检测到的传感信号,并将采集到的传感信号传送至控制单元140,控制单元140对接收到的传感信号进行判断识别处理,再将判断识别结果传送至手术机器人系统10,从而实现系统末端的自动识别。
59.本发明的末端装置可安装在手术机器人的机械臂上实现智能识别,不仅适用于常用的串联结构的单机械臂手术机器人,也可以适用在多臂的主从遥操作手术机器人上。通过本发明的安装方式,不用增加额外的图像扫描装置,在减少系统部件的同时也有利于设备在空间有限的手术室中进行摆放。
60.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。