1.本发明涉及工程机械技术领域,具体而言,涉及一种搅拌车的控制方法、装置、可读存储介质和搅拌车。
背景技术:
2.目前,市面上的混凝土搅拌车与混凝土泵车的协同作业基本不涉及料位高度的精确识别和跟踪,而是通过载荷传感器等判断料斗中的料位余量,以进行粗略范围的简单调控,无法将泵车料斗中的混凝土料位维持在目标高度。
3.因此,如何提出一种能够在搅拌车和泵车协同作业时,将泵车料斗中的混凝土料位维持在目标高度的方案成为目前亟待解决的问题。
技术实现要素:
4.为解决上述技术问题,本发明的第一方面提出了一种搅拌车的控制方法。
5.本发明的第二方面还提出了一种搅拌车的控制装置。
6.本发明的第三方面还提出了一种搅拌车的控制装置。
7.本发明的第四方面还提出了一种可读存储介质。
8.本发明的第五方面还提出了一种搅拌车。
9.有鉴于此,本发明第一方面提出了一种搅拌车的控制方法,用于控制搅拌车向料斗卸料,搅拌车的控制方法包括:获取料斗中的料位面的实际高度;确定料斗中的料位面的目标高度;判断实际高度与目标高度的差值是否处于预设阈值范围内;当差值不在预设阈值范围内的情况下,根据差值确定出搅拌车的发动机的目标转速;根据目标转速控制发动机转动。
10.根据本发明提供的搅拌车的控制方法,用于控制搅拌车向料斗卸料。其中,搅拌车和料斗是协同作业的,具体而言,搅拌车将其内的物料输入给料斗中,然后将料斗中的物料输送到指定地点。而在该过程中,当输出料斗中物料的速度改变时,料斗中的物料输入和输出的速比就发生了变化,料斗中的料位高度将不再能维持在目标高度,此时就需要对搅拌车向料斗中输入物料的速度进行调整,而搅拌车向料斗中输入物料的速度与搅拌车的搅拌筒转速相关,而搅拌车的搅拌筒转速与搅拌车的发动机转速有关,因此,当料斗中的物料无法维持在目标高度时,就需要对搅拌车的发动机转速进行调整,以使输入进料斗中的物料能够与输出料斗的物料保持平衡,使得物料面能够维持在目标高度。因此,本技术中,先确定料斗中的料位面实际高度,而后对料位面的目标高度进行确定。
11.具体的,现场的工作人员可以根据实际工况对目标高度进行合理设置,通过接收工作人员设定的目标高度来求取料位面的实际高度与目标高度的差值,进而判断差值是否处于所设定的预设阈值范围内,如果差值处于预设阈值范围内,表明料斗中的物料能够满足需求,不需要调整搅拌车的卸料速度。如果差值不在预设阈值范围内,则需要对搅拌筒的转速进行调整,以调整卸料速度,当需要对搅拌筒的转速进行调整时,基于所求取的差值对
搅拌车的发动机的目标转速进行确定,进而根据目标转速控制搅拌车发动机转动,以实现对搅拌车卸料的控制,使得料斗内的料位面能够维持在目标高度。比如,通过调整搅拌车的发动机转速来对搅拌车向料斗中输入物料的速度进行调整,当料斗中的料位面实际高度大于目标高度时,通过降低发动机转速来降低向料斗中输入物料的速度,当料斗中的料位面实际高度小于目标高度时,通过提高发动机转速来提高向料斗中输入物料的速度,以此使得料斗中的料位面能够维持在目标高度。该种方案,通过计算实际高度与目标高度的差值,并根据差值得到搅拌车的发动机目标转速,以便于根据目标转速控制搅拌车的发动机运转,实现了根据料位面的实际高度与料位面的目标高度的差值对搅拌车发动机转速的控制,以将泵车料斗中的料位面维持于目标高度,实现了对料斗和搅拌车协同作业过程中的搅拌车发动机转速的实时调控,以此在施工现场的工作情形变化时,也能够通过实际高度与目标高度的差值,及时对搅拌车发动机的转速进行实时调控。在实际应用过程中,料位面的目标高度会根据实际工况不断进行改变,因而本技术提供的搅拌车的控制方法能够基于料位面的目标高度的不断变化,实时控制发动机的转动。
12.另外,本发明提供的上述技术方案中的搅拌车的控制方法还可以具有如下附加技术特征:
13.在上述技术方案中,获取料斗中料位面的实际高度的步骤具体包括:通过视觉传感器获取料斗中的料位面的实际高度。
14.在该技术方案中,通过设置视觉传感器直接对料斗中的料位面的实际高度进行获取,相较于使用载荷传感器等通过在载荷间接判断料斗中的料位余量的获取料位面的实际高度的方式,本方法更加直接、精确,省去了换算过程,加快了处理速度,进而提高了工作效率。
15.其中,视觉传感器的数量可以为一个或多个,视觉传感器可以为tof相机。
16.在上述技术方案中,当差值不在预设阈值范围内的情况下,根据差值确定出搅拌车发动机的目标转速的步骤具体包括:将差值输入预先建立的pid控制系统,通过pid控制系统输出搅拌车的发动机的目标转速。
17.在该技术方案中,通过预先建立的pid(即proportional(比例)、integral(积分)、differential(微分)的缩写。顾名思义,pid控制算法是结合比例、积分和微分三种环节于一体的控制算法)控制系统,能够基于料斗中的料位面的实际高度与目标高度的差值,计算出适于该目标高度的搅拌车的发动机的目标转速,以根据目标转速对搅拌车的发动机转速进行调整控制,使得料斗中的料位面能够维持在目标高度。该种方案,通过pid控制系统计算搅拌车的发动机目标转速,以便于根据搅拌车的发动机目标转速控制搅拌车的发动机转动,由于当输出物料的速度改变时,料斗中的物料输入和输出的速比就发生了变化,料斗中的料位高度将不再能维持在目标高度,此时就需要对搅拌车向料斗中输入物料的速度进行调整,而搅拌车向料斗中输入物料的速度与搅拌车的搅拌筒转速相关,而搅拌车的搅拌筒转速与搅拌车的发动机转速有关,因此,当料斗中的物料无法维持在目标高度时,就需要对搅拌车的发动机转速进行调整,以使输入进料斗中的物料能够与输出料斗的物料保持平衡,使得物料面能够维持在目标高度,而基于pid算法的特性,所建立出的pid算法能够对放料速度进行及时跟踪,以此便能够及时预测料斗中的物料输出的速度变化,可以有效消除泵送排量变化时产生的料位波动。
18.此外,还可以通过建立差值-目标转速关联表等方式,基于目标高度与实际高度的差值对搅拌车的发动机的目标转速进行确定。
19.在上述技术方案中,搅拌车的控制方法还包括:建立pid控制系统,具体包括:获取搅拌车的搅拌筒转速与搅拌车的卸料速度;确定搅拌筒转速与搅拌车的卸料速度的函数关系;基于函数关系和搅拌筒转速得到搅拌车的发动机转速与搅拌车的卸料方量的函数关系,并将其转换成传递函数;基于传递函数生成pid控制系统。
20.在该技术方案中,通过预先建立pid控制系统,为获取搅拌车的发动机目标转速提供基础。具体的,获取通过实验获得的搅拌车的搅拌筒转速与卸料速度的测试数据,通过模型计算获得搅拌车的搅拌筒转速与搅拌车的卸料速度之间的函数关系。进而根据搅拌筒转速和搅拌筒转速与卸料速度的函数关系得到搅拌车的发动机转速和搅拌车的卸料方量的函数关系,并对搅拌车的发动机转速和搅拌车的卸料方量的函数关系进行转换得到传递函数,通过对该传递函数进行参数整定以及仿真得到pid控制比例参数kp、积分参数ki和微分参数kd,以此生成了pid控制系统,以便于使用pid控制策略计算搅拌车的发动机目标转速,pid控制系统除了能够对泵车的放料速度进行及时跟踪,还具备预测作用,可以有效消除泵车的泵送排量变化时产生的料位波动。其中,搅拌筒转速可以由计算公式计算,搅拌筒的计算公式可以是根据搅拌车的功力传递关系推导出的。
21.在上述技术方案中,料斗包括泵车上的料斗,确定料斗中的料位面的目标高度的步骤具体包括:根据泵车的泵送排量确定目标高度。
22.在该技术方案中,料斗包括泵车上的料斗,根据泵车的泵送排量对目标高度进行确定,便于根据泵车的泵送排量对目标高度进行合理设置,适用于不同的工况,当泵车的泵送排量大时,选取较高的目标高度,当泵车的泵送排量小时,选取较低的目标高度,以此能够有效的防止料斗中的物料被吸空或者溢出的情况的发生。
23.其中,泵车的泵送排量可以通过泵车的节流阀开口大小、泵车的发动机转速等方式进行确定。
24.在上述技术方案中,确定泵车的料斗中的料位面的目标高度的步骤包括:根据泵车的泵送排量获取与泵送排量对应的第一预设高度,将第一预设高度确定为目标高度;在泵车的泵送排量发生变化时,获取与变化后的泵送排量对应的泵车的料斗中的料位面的第二预设高度,将第二预设高度确定为目标高度。
25.在该技术方案中,可预先对不同的泵车的泵送排量设定对应的料位面的预设高度,进而根据泵车的泵送排量选取不同的预设高度作为目标高度,以在泵车的泵送排量发生变化时,能够及时对目标高度进行合理调整,使得泵车料斗中的料位面能够符合实际泵车的泵送排量的需求,能够避免料斗吸空以及溢出情况的发生。
26.本发明的第二方面提供了一种搅拌车的控制装置,用于控制搅拌车向料斗卸料,搅拌车的控制装置包括:获取模块,用于获取料斗中的料位面的实际高度;第一确定模块,用于确定料斗中的料位面的目标高度;判断模块,用于判断实际高度与目标高度的差值是否处于预设阈值范围内;第二确定模块,用于当差值不在预设阈值范围内的情况下,根据差值确定出搅拌车的发动机的目标转速;控制模块,用于根据目标转速控制发动机转动。
27.根据本发明的技术方案提供的搅拌车的控制装置,包括获取模块、判断模块、第一确定模块、第二确定模块和控制模块。其中,获取模块用于获取料斗中的料位面的实际高
度;第一确定模块用于确定料斗中的料位面的目标高度;判断模块,用于判断实际高度与目标高度的差值是否处于预设阈值范围内;第二确定模块,用于当差值不在预设阈值范围内的情况下,根据差值确定出搅拌车的发动机的目标转速;控制模块用于根据目标转速控制发动机转动。同时,根据本发明的技术方案提供的搅拌车的控制装置,由于其用于实现本发明的第一方面提供的搅拌车的控制方法的步骤,因而该搅拌车的控制装置具备该搅拌车的控制方法的全部技术效果,在此不再赘述。
28.在上述技术方案中,获取模块具体用于:通过视觉传感器获取料斗中的料位面的实际高度。
29.在该技术方案中,通过设置视觉传感器直接对料斗中的料位面的实际高度进行获取,相较于使用载荷传感器等通过在载荷间接判断料斗中的料位余量的获取料位面的实际高度的方式,本方法更加直接、精确,省去了换算过程,加快了处理速度,进而提高了工作效率。
30.其中,视觉传感器的数量可以为一个或多个,视觉传感器可以为tof相机。
31.在上述技术方案中,确定模块具体用于:将差值输入预先建立的pid控制系统,通过pid控制系统输出搅拌车的发动机的目标转速。
32.在该技术方案中,通过预先建立的pid控制系统,能够基于料斗中的料位面的实际高度与目标高度的差值,计算出适于该目标高度的搅拌车的发动机的目标转速,以根据目标转速对搅拌车的发动机转速进行调整控制,使得料斗中的料位面能够维持在目标高度。该种方案,通过pid控制系统计算搅拌车的发动机目标转速,以便于根据搅拌车的发动机目标转速控制搅拌车的发动机转动,
33.由于当料斗输出物料的速度改变时,料斗中的物料输入和输出的速比就发生了变化,料斗中的料位高度将不再能维持在目标高度,此时就需要对搅拌车向料斗中输入物料的速度进行调整,而搅拌车向料斗中输入物料的速度与搅拌车的搅拌筒转速相关,而搅拌车的搅拌筒转速与搅拌车的发动机转速有关,因此,当料斗中的物料无法维持在目标高度时,就需要对搅拌车的发动机转速进行调整,以使输入进料斗中的物料能够与输出料斗的物料保持平衡,使得物料面能够维持在目标高度,而基于pid算法的特性,所建立出的pid算法能够对泵车的放料速度进行及时跟踪,以此便能够及时预测料斗中的物料输出的速度变化,可以有效消除泵车的泵送排量变化时产生的料位波动。
34.此外,还可以通过建立差值-目标转速关联表等方式,基于目标高度与实际高度的差值对搅拌车的发动机的目标转速进行确定。
35.在上述技术方案中,搅拌车的控制装置还包括:建立模块,用于建立pid控制系统;建立模块具体用于:获取搅拌车的搅拌筒转速与搅拌车的卸料速度;确定搅拌筒转速与搅拌车的卸料速度的函数关系;基于函数关系和搅拌筒转速得到搅拌车的发动机转速与搅拌车的卸料方量的函数关系,并将其转换成传递函数;基于传递函数生成pid控制系统。
36.在该技术方案中,通过预先建立pid控制系统,为获取搅拌车的发动机目标转速提供基础。具体的,获取通过实验获得的搅拌车的搅拌筒转速与卸料速度的测试数据,通过模型计算获得搅拌车的搅拌筒转速与搅拌车的卸料速度之间的函数关系。进而根据搅拌筒转速和搅拌筒转速与卸料速度的函数关系得到搅拌车的发动机转速和搅拌车的卸料方量的函数关系,并对搅拌车的发动机转速和搅拌车的卸料方量的函数关系进行转换得到传递函
数,通过对该传递函数进行参数整定以及仿真得到pid控制比例参数kp、积分参数ki和微分参数kd,以此生成了pid控制系统,以便于使用pid控制策略计算搅拌车的发动机目标转速,pid控制系统除了能够对料斗的放料速度进行及时跟踪,还具备预测作用,可以有效消除料斗的排量变化时产生的料位波动。
37.在上述技术方案中,确定模块还用于:根据泵车的泵送排量确定目标高度。
38.在该技术方案中,根据泵车的泵送排量对目标高度进行确定,便于根据泵车的泵送排量对目标高度进行合理设置,适用于不同的工况,当泵车的泵送排量大时,选取较高的目标高度,当泵车的泵送排量小时,选取较低的目标高度,以此能够有效的防止料斗中的物料被吸空或者溢出的情况的发生。
39.其中,泵车的泵送排量可以通过泵车的节流阀开口大小、泵车的发动机转速等方式进行确定。
40.在上述技术方案中,确定模块还用于:根据泵车的泵送排量获取与泵送排量对应的第一预设高度,将第一预设高度确定为目标高度;在泵车的泵送排量发生变化时,获取与变化后的泵送排量对应的泵车的料斗中的料位面的第二预设高度,将第二预设高度确定为目标高度。
41.在该技术方案中,可预先对不同的泵车的泵送排量设定对应的料位面的预设高度,进而根据泵车的泵送排量选取不同的预设高度作为目标高度,以在泵车的泵送排量发生变化时,能够及时对目标高度进行合理调整,使得泵车料斗中的料位面能够符合实际泵车的泵送排量的需求,能够避免料斗吸空以及溢出情况的发生。
42.本发明的第三方面提供了一种搅拌车的控制装置,包括存储器和处理器,存储器存储可在处理器上运行的程序或指令,程序或指令被处理器执行时实现上述任一技术方案的搅拌车的控制方法的步骤。
43.根据本发明的技术方案提供的搅拌车的控制装置,包括存储器和处理器及存储在存储器上并可在处理器上运行的程序,程序被处理器执行时实现上述任一搅拌车的控制方法限定的步骤。同时,由于本技术的搅拌车的控制装置能够实现上述任一搅拌车的控制方法限定的步骤,因此本技术方案提供的搅拌车的控制装置具有上述任一技术方案中提供的搅拌车的控制方法的全部有益效果。
44.本发明的第四方面提供了一种可读存储介质,其上存储有程序和/或指令,程序和/或指令被处理器执行时实现上述任一技术方案中的搅拌车的控制方法的步骤。
45.根据本发明的技术方案提供的可读存储介质,由于其上存储的程序和/或指令被处理器执行时可实现上述任一技术方案中的搅拌车的控制方法的步骤,因而具有上述搅拌车的控制方法的全部有益技术效果,在此不再赘述。
46.本发明的第五方面提供了一种搅拌车,包括如上述第一方面技术方案或第二方面技术方案中的搅拌车的控制装置;和/或如第三方面技术方案中的可读存储介质。
47.根据本发明的技术方案提供的搅拌车,由于其包括如上述第一方面技术方案或第二方面技术方案中的搅拌车的控制装置和/或如第三方面技术方案中的可读存储介质。因而该搅拌车具备该搅拌车的控制装置和/或可读存储介质的全部技术效果,在此不再赘述。
48.其中,搅拌车可以为电动搅拌车。
49.本发明的附加方面和优点将在下面的描述部分中变得明显,或通过本发明的实践
了解到。
附图说明
50.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
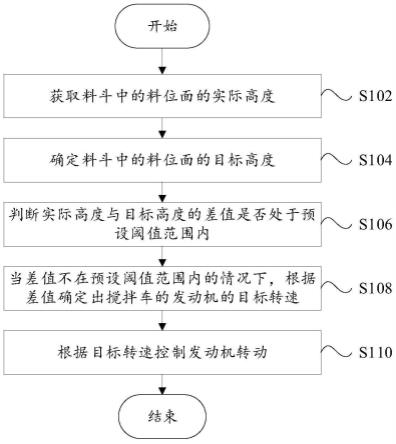
51.图1是根据本发明的实施例的搅拌车的控制方法的流程示意图;
52.图2是根据本发明的实施例的搅拌车的控制装置的方框图;
53.图3是根据本发明的实施例的搅拌车的控制装置的方框图;
54.图4是根据本发明的另一实施例的搅拌车的控制方法的流程示意图;
55.图5是根据本发明的另一实施例的建立pid控制系统的流程示意图。
56.其中,图2和图3中附图标记与部件名称之间的对应关系为:
57.200搅拌车的控制装置,202获取模块,204第一确定模块,206控制模块,208第二确定模块,300判断模块,302搅拌车的控制装置,304存储器,306处理器。
具体实施方式
58.为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
59.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
60.下面参照图1至图5描述本发明一些实施例中的搅拌车的控制方法和装置、可读存储介质和搅拌车。
61.本发明第一方面实施例提出了一种搅拌车的控制方法,用于控制搅拌车向料斗卸料,如图1所示,控制方法包括:
62.s102,获取料斗中的料位面的实际高度;
63.s104,确定料斗中的料位面的目标高度;
64.s106,判断实际高度与目标高度的差值是否处于预设阈值范围内;
65.s108,当差值不在预设阈值范围内的情况下,根据差值确定出搅拌车的发动机的目标转速;
66.s110,根据目标转速控制发动机转动。
67.根据本发明提供的搅拌车的控制方法,用于控制搅拌车向料斗卸料。其中,搅拌车和料斗是协同作业的,具体而言,搅拌车将其内的物料输入给料斗中,然后将料斗中的物料输送到指定地点。而在该过程中,当输出料斗中物料的速度改变时,料斗中的物料输入和输出的速比就发生了变化,料斗中的料位高度将不再能维持在目标高度,此时就需要对搅拌车向料斗中输入物料的速度进行调整,而搅拌车向料斗中输入物料的速度与搅拌车的搅拌筒转速相关,而搅拌车的搅拌筒转速与搅拌车的发动机转速有关,因此,当料斗中的物料无法维持在目标高度时,就需要对搅拌车的发动机转速进行调整,以使输入进料斗中的物料能够与输出料斗的物料保持平衡,使得物料面能够维持在目标高度。因此,本技术中,先确
定料斗中的料位面实际高度,而后对料位面的目标高度进行确定。具体的,现场的工作人员可以根据实际工况对目标高度进行合理设置,通过接收工作人员设定的目标高度来求取料位面的实际高度与目标高度的差值,进而判断差值是否处于所设定的预设阈值范围内,如果差值处于预设阈值范围内,表明料斗中的物料能够满足需求,不需要调整搅拌车的卸料速度。如果差值不在预设阈值范围内,则需要对搅拌筒的转速进行调整,以调整卸料速度,当需要对搅拌筒的转速进行调整时,基于所求取的差值对搅拌车的发动机的目标转速进行确定,进而根据目标转速控制搅拌车发动机转动,以实现对搅拌车卸料的控制,使得料斗内的料位面能够维持在目标高度。比如,通过调整搅拌车的发动机转速来对搅拌车向料斗中输入物料的速度进行调整,当料斗中的料位面实际高度大于目标高度时,通过降低发动机转速来降低向料斗中输入物料的速度,当料斗中的料位面实际高度小于目标高度时,通过提高发动机转速来提高向料斗中输入物料的速度,以此使得料斗中的料位面能够维持在目标高度。该种方案,通过计算实际高度与目标高度的差值,并根据差值得到搅拌车的发动机目标转速,以便于根据目标转速控制搅拌车的发动机运转,实现了根据料位面的实际高度与料位面的目标高度的差值对搅拌车发动机转速的控制,以将泵车料斗中的料位面维持于目标高度,实现了对料斗和搅拌车协同作业过程中的搅拌车发动机转速的实时调控,以此在施工现场的工作情形变化时,也能够通过实际高度与目标高度的差值,及时对搅拌车发动机的转速进行实时调控。在实际应用过程中,料位面的目标高度会根据实际工况不断进行改变,因而本技术提供的搅拌车的控制方法能够基于料位面的目标高度的不断变化,实时控制发动机的转动。
68.在上述实施例中,获取料斗中料位面的实际高度的步骤具体包括:通过视觉传感器获取料斗中的料位面的实际高度。
69.在该实施例中,通过设置视觉传感器直接对料斗中的料位面的实际高度进行获取,相较于使用载荷传感器等通过在载荷间接判断料斗中的料位余量的获取料位面的实际高度的方式,本方法更加直接、精确,省去了换算过程,加快了处理速度,进而提高了工作效率。
70.其中,视觉传感器的数量可以为一个或多个,视觉传感器可以为tof相机。
71.在上述实施例中,当差值不在预设阈值范围内的情况下,根据差值确定出搅拌车发动机的目标转速的步骤具体包括:将差值输入预先建立的pid控制系统,通过pid控制系统输出搅拌车的发动机的目标转速。
72.在该实施例中,通过预先建立的pid(即proportional(比例)、integral(积分)、differential(微分)的缩写。顾名思义,pid控制算法是结合比例、积分和微分三种环节于一体的控制算法)控制系统,能够基于料斗中的料位面的实际高度与目标高度的差值,计算出适于该目标高度的搅拌车的发动机的目标转速,以根据目标转速对搅拌车的发动机转速进行调整控制,使得料斗中的料位面能够维持在目标高度。该种方案,通过pid控制系统计算搅拌车的发动机目标转速,以便于根据搅拌车的发动机目标转速控制搅拌车的发动机转动,由于当输出物料的速度改变时,料斗中的物料输入和输出的速比就发生了变化,料斗中的料位高度将不再能维持在目标高度,此时就需要对搅拌车向料斗中输入物料的速度进行调整,而搅拌车向料斗中输入物料的速度与搅拌车的搅拌筒转速相关,而搅拌车的搅拌筒转速与搅拌车的发动机转速有关。因此,当料斗中的物料无法维持在目标高度时,就需要对
搅拌车的发动机转速进行调整,以使输入进料斗中的物料能够与输出料斗的物料保持平衡,使得物料面能够维持在目标高度,而基于pid算法的特性,所建立出的pid算法能够对放料速度进行及时跟踪,以此便能够及时预测料斗中的物料输出的速度变化,可以有效消除泵送排量变化时产生的料位波动。
73.此外,还可以通过建立差值-目标转速关联表等方式,基于目标高度与实际高度的差值对搅拌车的发动机的目标转速进行确定。
74.在上述实施例中,搅拌车的控制方法还包括:建立pid控制系统,具体包括:获取搅拌车的搅拌筒转速与搅拌车的卸料速度;确定搅拌筒转速与搅拌车的卸料速度的函数关系;基于函数关系和搅拌筒转速得到搅拌车的发动机转速与搅拌车的卸料方量的函数关系,并将其转换成传递函数;基于传递函数生成pid控制系统。
75.在该实施例中,通过预先建立pid控制系统,为获取搅拌车的发动机目标转速提供基础。具体的,获取通过实验获得的搅拌车的搅拌筒转速与卸料速度的测试数据,通过模型计算获得搅拌车的搅拌筒转速与搅拌车的卸料速度之间的函数关系。进而根据搅拌筒转速公式和搅拌筒转速与卸料速度的函数关系得到搅拌车的发动机转速和搅拌车的卸料方量的函数关系,并对搅拌车的发动机转速和搅拌车的卸料方量的函数关系进行转换得到传递函数,通过对该传递函数进行参数整定以及仿真得到pid控制比例参数kp、积分参数ki和微分参数kd,以此生成了pid控制系统,以便于使用pid控制策略计算搅拌车的发动机目标转速,pid控制系统除了能够对泵车的放料速度进行及时跟踪,还具备预测作用,可以有效消除泵车的泵送排量变化时产生的料位波动。其中,搅拌筒转速可以由计算公式计算,搅拌筒的计算公式可以是根据搅拌车的功力传递关系推导出的。
76.在上述实施例中,料斗包括泵车上的料斗,确定料斗中的料位面的目标高度的步骤具体包括:根据泵车的泵送排量确定目标高度。
77.在该实施例中,料斗包括泵车上的料斗,根据泵车的泵送排量对目标高度进行确定,便于根据泵车的泵送排量对目标高度进行合理设置,适用于不同的工况,当泵车的泵送排量大时,选取较高的目标高度,当泵车的泵送排量小时,选取较低的目标高度,以此能够有效的防止料斗中的物料被吸空或者溢出的情况的发生。
78.其中,泵车的泵送排量可以通过泵车的节流阀开口大小、泵车的发动机转速等方式进行确定。
79.在上述实施例中,确定泵车的料斗中的料位面的目标高度的步骤包括:根据泵车的泵送排量获取与泵送排量对应的第一预设高度,将第一预设高度确定为目标高度;在泵车的泵送排量发生变化时,获取与变化后的泵送排量对应的泵车的料斗中的料位面的第二预设高度,将第二预设高度确定为目标高度。
80.在该实施例中,可预先对不同的泵车的泵送排量设定对应的料位面的预设高度,进而根据泵车的泵送排量选取不同的预设高度作为目标高度,以在泵车的泵送排量发生变化时,能够及时对目标高度进行合理调整,使得泵车料斗中的料位面能够符合实际泵车的泵送排量的需求,能够避免料斗吸空以及溢出情况的发生。
81.本发明的第二方面实施例提供了一种搅拌车的控制装置200,用于控制搅拌车向料斗卸料,如图2所示,搅拌车的控制装置200包括:获取模块,用于获取料斗中的料位面的实际高度;第一确定模块,用于确定料斗中的料位面的目标高度,判断模块300,用于判断实
际高度与目标高度的差值是否处于预设阈值范围内;第二确定模块208,用于当差值不在预设阈值范围内的情况下,根据差值确定出搅拌车的发动机的目标转速;控制模块206,用于根据目标转速控制发动机转动。
82.根据本发明的实施例提供的搅拌车的控制装置200,包括获取模块202、判断模块300、第一确定模块204、第二确定模块208和控制模块206。其中,获取模块202,用于获取料斗中的料位面的实际高度;第一确定模块204,用于确定料斗中的料位面的目标高度;判断模块300,用于判断实际高度与目标高度的差值是否处于预设阈值范围内;第二确定模块208,用于当差值不在预设阈值范围内的情况下,根据差值确定出搅拌车的发动机的目标转速;控制模块206,用于根据目标转速控制发动机转动。同时,根据本发明的实施例提供的搅拌车的控制装置,由于其用于实现本发明的第一方面提供的搅拌车的控制方法的步骤,因而该搅拌车的控制装置具备该搅拌车的控制方法的全部技术效果,在此不再赘述。
83.在上述实施例中,获取模块具体用于:通过视觉传感器获取料斗中的料位面的实际高度。
84.在该实施例中,通过设置视觉传感器直接对料斗中的料位面的实际高度进行获取,相较于使用载荷传感器等通过在载荷间接判断料斗中的料位余量的获取料位面的实际高度的方式,本方法更加直接、精确,省去了换算过程,加快了处理速度,进而提高了工作效率。
85.其中,视觉传感器的数量可以为一个或多个,视觉传感器可以为tof相机。
86.在上述实施例中,确定模块具体用于:将差值输入预先建立的pid控制系统,通过pid控制系统输出搅拌车的发动机的目标转速。
87.在该实施例中,通过预先建立的pid控制系统,能够基于料斗中的料位面的实际高度与目标高度的差值,计算出适于该目标高度的搅拌车的发动机的目标转速,以根据目标转速对搅拌车的发动机转速进行调整控制,使得料斗中的料位面能够维持在目标高度。该种方案,通过pid控制系统计算搅拌车的发动机目标转速,以便于根据搅拌车的发动机目标转速控制搅拌车的发动机转动,
88.由于当料斗输出物料的速度改变时,料斗中的物料输入和输出的速比就发生了变化,料斗中的料位高度将不再能维持在目标高度,此时就需要对搅拌车向料斗中输入物料的速度进行调整,而搅拌车向料斗中输入物料的速度与搅拌车的搅拌筒转速相关,而搅拌车的搅拌筒转速与搅拌车的发动机转速有关,因此,当料斗中的物料无法维持在目标高度时,就需要对搅拌车的发动机转速进行调整,以使输入进料斗中的物料能够与输出料斗的物料保持平衡,使得物料面能够维持在目标高度,而基于pid算法的特性,所建立出的pid算法能够对泵车的放料速度进行及时跟踪,以此便能够及时预测料斗中的物料输出的速度变化,可以有效消除泵车的泵送排量变化时产生的料位波动。
89.此外,还可以通过建立差值-目标转速关联表等方式,基于目标高度与实际高度的差值对搅拌车的发动机的目标转速进行确定。
90.在上述实施例中,搅拌车的控制装置还包括:建立模块,用于建立pid控制系统;建立模块具体用于:获取搅拌车的搅拌筒转速与搅拌车的卸料速度;确定搅拌筒转速与搅拌车的卸料速度的函数关系;基于函数关系和搅拌筒转速得到搅拌车的发动机转速与搅拌车的卸料方量的函数关系,并将其转换成传递函数;基于传递函数生成pid控制系统。
91.在该实施例中,通过预先建立pid控制系统,为获取搅拌车的发动机目标转速提供基础。具体的,获取通过实验获得的搅拌车的搅拌筒转速与卸料速度的测试数据,通过模型计算获得搅拌车的搅拌筒转速与搅拌车的卸料速度之间的函数关系。进而根据搅拌筒转速和搅拌筒转速与卸料速度的函数关系得到搅拌车的发动机转速和搅拌车的卸料方量的函数关系,并对搅拌车的发动机转速和搅拌车的卸料方量的函数关系进行转换得到传递函数,通过对该传递函数进行参数整定以及仿真得到pid控制比例参数kp、积分参数ki和微分参数kd,以此生成了pid控制系统,以便于使用pid控制策略计算搅拌车的发动机目标转速,pid控制系统除了能够对料斗的放料速度进行及时跟踪,还具备预测作用,可以有效消除料斗的排量变化时产生的料位波动。
92.在上述实施例中,确定模块还用于:根据泵车的泵送排量确定目标高度。
93.在该实施例中,根据泵车的泵送排量对目标高度进行确定,便于根据泵车的泵送排量对目标高度进行合理设置,适用于不同的工况,当泵车的泵送排量大时,选取较高的目标高度,当泵车的泵送排量小时,选取较低的目标高度,以此能够有效的防止料斗中的物料被吸空或者溢出的情况的发生。
94.其中,泵车的泵送排量可以通过泵车的节流阀开口大小、泵车的发动机转速等方式进行确定。
95.在上述实施例中,确定模块还用于:根据泵车的泵送排量获取与泵送排量对应的第一预设高度,将第一预设高度确定为目标高度;在泵车的泵送排量发生变化时,获取与变化后的泵送排量对应的泵车的料斗中的料位面的第二预设高度,将第二预设高度确定为目标高度。
96.在该实施例中,可预先对不同的泵车的泵送排量设定对应的料位面的预设高度,进而根据泵车的泵送排量选取不同的预设高度作为目标高度,以在泵车的泵送排量发生变化时,能够及时对目标高度进行合理调整,使得泵车料斗中的料位面能够符合实际泵车的泵送排量的需求,能够避免料斗吸空以及溢出情况的发生。
97.本发明的第三方面实施例提供了一种搅拌车的控制装置302,如图3所示,包括:存储器304、处理器306及存储在存储器304上并可在处理器306上运行的程序,程序被处理器306执行时实现上述任一实施例的搅拌车的控制方法限定的步骤。
98.根据本发明的实施例提供的搅拌车的控制装置,包括存储器和处理器及存储在存储器上并可在处理器上运行的程序,程序被处理器执行时实现上述任一搅拌车的控制方法限定的步骤。同时,由于本技术的搅拌车的控制装置能够实现上述任一搅拌车的控制方法限定的步骤,因此本实施例提供的搅拌车的控制装置具有上述任一实施例中提供的搅拌车的控制方法的全部有益效果。
99.本发明的第四方面实施例提供了一种可读存储介质,其上存储有程序和/或指令,程序和/或指令被处理器执行时实现上述任一实施例中的搅拌车的控制方法的步骤。
100.根据本发明的实施例提供的可读存储介质,由于其上存储的程序和/或指令被处理器执行时可实现上述任一实施例中的搅拌车的控制方法的步骤,因而具有上述搅拌车的控制方法的全部有益技术效果,在此不再赘述。
101.本发明的第五方面实施例提供了一种搅拌车,包括如上述第一方面实施例或第二方面实施例中的搅拌车的控制装置;或如上述第三方面实施例中的可读存储介质。
102.根据本发明的实施例提供的搅拌车,由于其包括如上述实施例中的搅拌车的控制装置或如上述实施例中的可读存储介质。因而该搅拌车具备该搅拌车的控制装置或可读存储介质的全部技术效果,在此不再赘述。
103.其中,搅拌车可以为电动搅拌车。
104.下面结合另一具体实施例来进一步介绍本技术提供的搅拌车的控制方法。
105.本实施例提供的搅拌车的控制方法,如图4所示,包括:
106.s402,视觉传感器获取料位高度h。
107.具体的,由视觉检测设备获取泵送车辆料斗中料位面的实际高度值h,并将高度值传输至控制器。
108.s404,获取根据现场工况设定的目标高度ht。
109.具体的,根据泵车性能参数和施工工况,将料斗高度从下至上设置多个高度级别h1~hn,其中h1为最高料位,接近筛网面,hn为最低料位接近料斗下侧。人工根据现场的施工状况选定合适的目标高度ht。
110.s406,计算实际高度h与目标高度ht的差值δh。
111.s408,将差值δh作为pid控制系统的输入量,计算出搅拌车发动机的目标转速v
t
。
112.s410,根据目标转速v
t
调整搅拌车的发动机转速,以改变搅拌筒放料速度。
113.其中,建立pid控制系统的步骤如图5所示,包括:
114.s502,根据搅拌车动力学方程建立传递函数。
115.具体的,根据搅拌车功力传递关系和油泵排量vg的计算公式,推导得出搅拌筒转速v的计算公式。
116.具体的,根据搅拌车功力传递关系有:n
×vg
=vm×y×
v,其中n为发动机转速,v为搅拌筒转速,vm为马达排量,y为减速机减速比,液压油泵输出流量vg,油泵排量vg的计算公式:
[0117][0118]
其中v
gmax
为最大油泵排量,i
pwm
为控制电磁阀的pwm电流,k
pwm
为电流转换参数。
[0119]
进而可以推出搅拌筒转速v的计算公式:
[0120][0121]
通过实验获得的搅拌筒转速与搅拌车混凝土卸料速度的测试数据,通过模型辨识得到两者之间的函数关系,将s404中得到的搅拌筒转速的计算公式代入,获得发动机转速与搅拌车混凝土卸料方量的关系式,并将其转换成传递函数g(s)。
[0122]
s504,通过传递函数得到pid控制参数。
[0123]
具体的,通过参数整定仿真得到该控制系统对应的pid控制比例参数kp、积分参数ki和微分参数kd。
[0124]
本实施例采用视觉设备直接获取料位面与筛网面间的高度值,相较于使用载荷传感器等间接计算料位体积的方式,可以得到精确的实时料位高度值;通过建立搅拌车从发动机转速到搅拌筒转速和目标料位联动的传递函数模型,使用pid控制策略计算发动机目
标转速值,除了能及时跟踪泵车放料速度,pid算法中的微分环节还具备预测作用,可以有效消除泵送速度变化时产生的料位高度波动。同时,当施工排量发生变化时,通过将目标高度值重新调整为合适水平,再以新的目标高度重新执行上述方法的步骤,计算得到搅拌车发动机的目标转速值v
t
,并根据目标转速值v
t
对搅拌车发动机的目标转速值进行调整,以此保证了泵车料斗中的混凝土料位处于合适的目标高度。
[0125]
在本说明书中,术语“多个”则指两个或两个以上,除非另有明确的限定。术语“安装”、“相连”、“连接”、“固定”等术语均应做广义理解,例如,“连接”可以是固定连接,也可以是可拆卸连接,或一体地连接;“相连”可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
[0126]
在本说明书的描述中,术语“一个实施例”、“一些实施例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或实例。而且,描述的具体特征、结构、材料或特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0127]
以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
