技术特征:
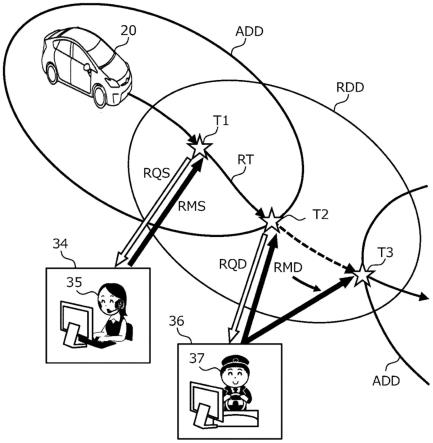
1.一种远程操作委托系统,其特征在于,包括远程操作委托装置,所述远程操作委托装置具备:存储器,存储有程序;以及处理器,与所述存储器耦合,其中,所述处理器被配置为:在自动驾驶车辆难以继续进行自动驾驶的情况下或者在预测自动驾驶车辆会难以继续进行自动驾驶的情况下,向远程操作者委托所述自动驾驶车辆的远程操作,所述远程操作具有:远程支持,由所述远程操作者进行用于所述自动驾驶的判断中的至少一部分;以及远程驾驶,由所述远程操作者进行所述自动驾驶车辆的转向操作和加减速操作中的至少一方,所述处理器被配置为:在所述程序的执行时,在能通过接受所述远程支持而继续进行所述自动驾驶的自动驾驶区域内委托所述远程支持;以及在所述自动驾驶区域外委托所述远程驾驶。2.根据权利要求1所述的远程操作委托系统,其特征在于,所述处理器被配置为:在所述自动驾驶区域内并且在能进行所述远程驾驶的远程驾驶区域内,委托所述远程支持而不委托所述远程驾驶。3.根据权利要求1或2所述的远程操作委托系统,其特征在于,所述处理器被配置为:基于至少生成到前方规定时间或前方规定距离的路径来判断所述自动驾驶车辆继续进行所述自动驾驶到所述前方规定时间或所述前方规定距离是否困难。4.根据权利要求1至3中任一项所述的远程操作委托系统,其特征在于,所述自动驾驶区域具有预先设定的区域。5.根据权利要求1至4中任一项所述的远程操作委托系统,其特征在于,所述自动驾驶区域具有随时间而变化的区域。6.根据权利要求1至5中任一项所述的远程操作委托系统,其特征在于,所述处理器被配置为:基于由所述自动驾驶车辆获取的外部信息和内部信息来执行所述自动驾驶区域的内外判定。7.根据权利要求1至6中任一项所述的远程操作委托系统,其特征在于,所述处理器被配置为:在所述自动驾驶区域外并且在能进行所述远程驾驶的远程驾驶区域内,委托所述远程驾驶;以及在所述自动驾驶区域外并且在所述远程驾驶区域外,使所述自动驾驶车辆停止或者变更所述自动驾驶车辆的轨道。8.根据权利要求7所述的远程操作委托系统,其特征在于,所述远程驾驶区域具有预先设定的区域。9.根据权利要求7或8所述的远程操作委托系统,其特征在于,所述远程驾驶区域具有随时间而变化的区域。
10.根据权利要求7至9中任一项所述的远程操作委托系统,其特征在于,所述处理器被配置为:基于由所述自动驾驶车辆获取的外部信息和内部信息来执行所述远程驾驶区域的内外判定。11.根据权利要求1所述的远程操作委托系统,其特征在于,还包括:服务器,被配置为通过通信网络与所述远程操作委托装置连接,其中,所述远程操作委托装置搭载于自动驾驶车辆,所述远程操作委托装置被配置为:通过与所述服务器的协作,在能通过接受所述远程支持而继续进行所述自动驾驶的自动驾驶区域内委托所述远程支持;以及通过与所述服务器的协作,在所述自动驾驶区域外委托所述远程驾驶。12.根据权利要求11所述的远程操作委托系统,其特征在于,所述远程操作委托装置被配置为:在所述自动驾驶车辆难以继续进行所述自动驾驶的情况下,或者在预测所述自动驾驶车辆会难以继续进行所述自动驾驶的情况下,将所述自动驾驶车辆所具有的用于所述自动驾驶区域的内外判定的第一信息发送至所述服务器,所述服务器被配置为:基于从所述远程操作委托装置发送的用于所述自动驾驶区域的内外判定的所述第一信息和通过所述服务器获取的影响所述自动驾驶的第二信息,来执行所述自动驾驶区域的内外判定;以及决定是委托所述远程支持还是委托所述远程驾驶。13.一种远程操作委托方法,其特征在于,包括:在自动驾驶车辆难以继续进行自动驾驶的情况下,或者在预测自动驾驶车辆会难以继续进行自动驾驶的情况下,计算机向远程操作者委托所述自动驾驶车辆的远程操作;在能通过接受远程支持而继续进行所述自动驾驶的自动驾驶区域内,委托由所述远程操作者进行用于所述自动驾驶的判断中的至少一部分的所述远程支持;以及在所述自动驾驶区域外,委托由所述远程操作者进行所述自动驾驶车辆的转向操作和加减速操作中的至少一方的远程驾驶,其中,所述远程操作具有所述远程支持和所述远程驾驶。14.一种非暂时性存储介质,储存有程序,该程序能由一个或多个处理器执行,并且使所述一个或多个处理器执行以下的功能,所述非暂时性存储介质的特征在于,所述功能包括:在自动驾驶车辆难以继续进行自动驾驶的情况下,或者在预测自动驾驶车辆会难以继续进行自动驾驶的情况下,向远程操作者委托所述自动驾驶车辆的远程操作;在能通过接受远程支持而继续进行所述自动驾驶的自动驾驶区域内,委托由所述远程操作者进行用于所述自动驾驶的判断中的至少一部分的所述远程支持;以及在所述自动驾驶区域外,委托由所述远程操作者进行所述自动驾驶车辆的转向操作和加减速操作中的至少一方的远程驾驶,其中,所述远程操作具有所述远程支持和所述远程驾驶。
技术总结
本发明涉及远程操作委托系统、远程操作委托方法以及存储介质。远程操作委托方法包括:在自动驾驶车辆难以继续进行自动驾驶的情况下或者在预测自动驾驶车辆会难以继续进行自动驾驶的情况下,计算机向远程操作者委托所述自动驾驶车辆的远程操作;在能通过接受远程支持而继续进行所述自动驾驶的自动驾驶区域内委托由所述远程操作者进行用于所述自动驾驶的判断中的至少一部分的所述远程支持;以及在所述自动驾驶区域外委托由所述远程操作者进行所述自动驾驶车辆的转向操作和加减速操作中的至少一方的远程驾驶。中的至少一方的远程驾驶。中的至少一方的远程驾驶。
技术研发人员:浦野博充 大泷翔 铃木隆史 高岛亨 郑好政 小林宏充 丹羽悟 赤冢康佑
受保护的技术使用者:丰田自动车株式会社
技术研发日:2022.05.31
技术公布日:2022/12/8
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。