技术特征:
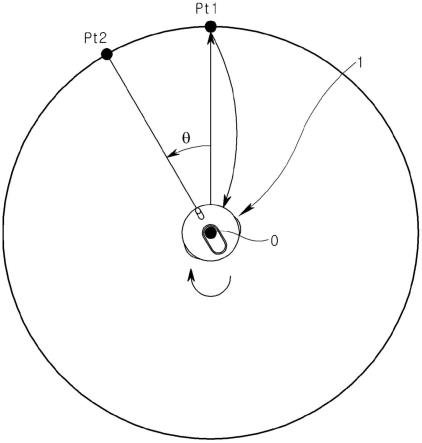
1.一种扫地机器人,其特征在于,包括:主体,在内部形成有容纳电池、水桶以及马达的空间,在正面设置有缓冲件;以及一对旋转板,面向地板面的抹布结合于其下侧,一对所述旋转板可旋转地配置于所述主体的底面,所述主体往复行驶于地板面上的规定原点和距所述原点配置在规定距离上的复数个目标地点之间。2.根据权利要求1所述的扫地机器人,其特征在于,复数个所述目标地点配置在以所述原点为中心的同心圆上。3.根据权利要求1所述的扫地机器人,其特征在于,复数个所述目标地点彼此隔着规定相位差配置在同心圆上。4.根据权利要求1所述的扫地机器人,其特征在于,从所述原点行驶至所述目标地点时的主体的行驶路径和从所述目标地点行驶至所述原点时的主体的行驶路径彼此不同。5.一种扫地机器人,其特征在于,包括:主体,在内部形成有容纳电池、水桶以及马达的空间,在正面设置有缓冲件;以及一对旋转板,面向地板面的抹布结合于其下侧,一对所述旋转板可旋转地配置于所述主体的底面,所述主体的至少一部分在所述地板面上的具有规定半径的圆形的清扫区域内行驶,并且在所述清扫区域的圆周上的某一地点和所述清扫区域的原点之间往复行驶。6.一种扫地机器人的控制方法,所述扫地机器人包括面向地板面的抹布结合于其下侧的一对旋转板,并且通过旋转一对所述旋转板来进行行驶,其中,所述控制方法包括:第一行驶步骤,使所述扫地机器人从地板面上的规定出发地点出发并行驶规定距离;第二行驶步骤,在所述第一行驶步骤之后,使所述扫地机器人行驶至所述出发地点;以及方向转换步骤,使所述扫地机器人旋转规定的方向转换角度。7.根据权利要求6所述的扫地机器人的控制方法,其特征在于,在所述第一行驶步骤中,所述扫地机器人直前行驶至规定目标地点。8.根据权利要求6所述的扫地机器人的控制方法,其特征在于,在所述第二行驶步骤中,沿与所述第一行驶步骤中的所述扫地机器人的行驶路径不同的路径行驶。9.根据权利要求6所述的扫地机器人的控制方法,其特征在于,在所述第一行驶步骤之后,还包括:返回旋转步骤,使所述扫地机器人旋转规定返回旋转角度。10.根据权利要求6所述的扫地机器人的控制方法,其特征在于,在所述第二行驶步骤中,所述扫地机器人沿具有规定曲率的路径行驶。11.根据权利要求6所述的扫地机器人的控制方法,其特征在于,
在所述第一行驶步骤之前,还包括:区域设定步骤,在地板面上设定清扫区域。12.根据权利要求11所述的扫地机器人的控制方法,其特征在于,在所述区域设定步骤中,以规定原点为中心绘制规定半径的虚拟圆来设定所述清扫区域。13.根据权利要求12所述的扫地机器人的控制方法,其特征在于,所述出发地点为所述原点。14.根据权利要求12所述的扫地机器人的控制方法,其特征在于,所述出发地点位于以所述原点为中心的同心圆上。15.根据权利要求6所述的扫地机器人的控制方法,其特征在于,在所述第一行驶步骤之前,还包括:行驶准备步骤,将所述扫地机器人配置在最初出发地点。16.根据权利要求15所述的扫地机器人的控制方法,其特征在于,还包括:行驶结束步骤,若所述扫地机器人位于所述最初出发地点,则使所述扫地机器人停止。17.根据权利要求6所述的扫地机器人的控制方法,其特征在于,所述方向转换角度(
°
)的倍数是360
°
的倍数。
技术总结
本发明涉及一种扫地机器人的控制方法,所述扫地机器人包括面向地板面的抹布结合于其下侧的一对旋转板,通过旋转一对所述旋转板来进行行驶,其中,所述控制方法包括:第一行驶步骤,使所述扫地机器人从地板面上的规定出发地点出发并行驶规定距离;第二行驶步骤,在所述第一行驶步骤之后,使所述扫地机器人行驶至所述出发地点;以及方向转换步骤,使所述扫地机器人旋转规定的方向转换角度,从而具有能够在圆形的清扫区域内反复行驶的同时仔细地清扫的效果。的效果。的效果。
技术研发人员:沈印辅 慎龙佶 金柯延
受保护的技术使用者:LG电子株式会社
技术研发日:2021.04.23
技术公布日:2022/12/8
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。