1.本发明涉及agv车技术领域,具体为一种卡车举升式充电装置。
背景技术:
2.agv车指装备有电磁或光学等自动导航装置,能够沿规定的导航路径行驶,具有安全保护以及各种移载功能的运输卡车,工业应用中不需要驾驶员的搬运车,以可充电的蓄电池为其动力来源,一般可通过电脑来控制其行进路径以及行为,或利用电磁轨道来设立其行进路径,电磁轨道黏贴于地板上,无人搬运车则依靠电磁轨道所带来的讯息进行移动与动作,现有agv运输卡车在使用的过程中一般采用有线充电或者无线充电,其中无线充电是通过举升式充电装置将agv运输卡车抬升起来并通过无线充电装置进行充电,具有保证agv运输卡车运行线路畅通,提高agv运输卡车通行效率的优点。
3.现有的用于举升式充电装置在使用的过程中主要存在以下弊端:一次只能举升一辆agv运输卡车进行充电,当多辆agv运输卡车需要进行充电时,只能进行排队等待,充电效率较低,因此,如何解决多辆agv运输卡车同时进行充电提高充电效率即为本发明需要解决的问题。
技术实现要素:
4.本发明旨在解决现有技术或相关技术中存在的技术问题之一。
5.为此,本发明所采用的技术方案为:一种卡车举升式充电装置,包括:主体模块、移动模块、固定模块以及提升模块,所述主体模块包括箱体、多个呈阵列安装在箱体内壁上的充电组件以及安装在箱体外侧面上的plc控制器。
6.所述移动模块包括多个呈对称安装在箱体内壁上且伸出箱体的电动伸缩杆、安装在电动伸缩杆端部上且对称设置的支架、两端分别与相对支架底端连接固定的连接杆以及安装在连接杆靠近箱体一侧的平台。
7.所述固定模块包括滑动设置在支架内的滑块、两端分别与相对支架内滑块固定的滑轨、对称且滑动设置在滑轨上的滑动件、安装在滑动件外侧面上的夹持组件以及安装在滑块的外侧面上且穿过滑块伸入滑轨内腔的驱动组件。
8.所述提升模块包括安装在箱体顶端的第二电机、对称安装在箱体顶端的卷收组件、端部分别与相对卷收组件相连接的连接轴、安装在支架顶端的滑轮以及一端套接在卷收组件上另一端通过滑轮与滑块顶端连接固定的钢丝绳。
9.本发明在一较佳示例中可以进一步配置为:所述充电组件包括端部固定在箱体内壁上的放置板、安装在放置板底端且穿过放置板的无线充电装置、安装在箱体内壁上且位于放置板一侧的激光发射器以及安装在箱体相对内壁上且位于放置板另一侧的激光接收器,所述激光发射器与所述激光接收器位置相互对应,且二者位置均位于放置板的横向中心线上。
10.通过采用上述技术方案,放置板用于放置agv运输卡车,保持agv运输卡车在充电
时的稳定性,无线充电装置用于对agv运输卡车进行无线充电,激光发射器与激光接收器用于判断放置板上是否存在agv运输卡车在进行充电,激光发射器发出的激光被agv运输卡车阻挡,激光接收器无法接收到激光,此时plc控制器判断该放置板上存在agv运输卡车在进行充电,反之,激光发射器发射的激光被激光接收器接收,plc控制器即判断放置板上无agv运输卡车在进行充电。
11.本发明在一较佳示例中可以进一步配置为:所述平台与连接杆平行的横截面呈等腰梯形,且两侧斜面的倾斜角度为十七度,所述箱体的底端开有横截面呈矩形的凹槽,所述凹槽的宽度与高度略大于平台的长度与高度。
12.通过采用上述技术方案,平台用于方便agv运输卡车进行停放,从而方便固定模块进行夹持固定,横截面呈等腰梯形设置且斜面设置为十七度,方便agv运输卡车移动到平台上,凹槽用于在移动模块收缩时存放平台。
13.本发明在一较佳示例中可以进一步配置为:所述支架相对的内壁上设置有滑槽,所述滑块嵌合在滑槽内滑动。
14.通过采用上述技术方案,滑块嵌合在滑槽内滑动,保持滑块在移动时保持稳定性。
15.本发明在一较佳示例中可以进一步配置为:所述夹持组件包括端部固定在滑动件外侧面上的支杆、安装在支杆远离滑动件端部上的夹板以及安装在夹板竖侧面上的碰撞传感器,所述夹板的横截面呈l状,且水平面长度为竖直面长度的两倍。
16.通过采用上述技术方案,支杆用于安装夹板,夹板用于夹持固定agv运输卡车,保持agv运输卡车在移动过程中的稳定性,碰撞传感器用于检测夹板是否触摸到agv运输卡车。
17.本发明在一较佳示例中可以进一步配置为:所述驱动组件包括安装在一侧滑块上的底板、安装在底板上的第一电机以及一端与第一电机轴连接另一端穿过滑轨转动安装在与第一电机相对滑块上的双头螺纹杆,所述滑动件的端部开有螺纹孔,所述双头螺纹杆穿过螺纹杆且与螺纹孔相互啮合。
18.通过采用上述技术方案,当第一电机转动时,带动双头螺纹杆进行转动,双头螺纹杆转动带动滑动块进行相向的移动,从而带动安装在滑动块上的夹持组件进行相向的移动,将agv运输卡车夹持固定住。
19.本发明在一较佳示例中可以进一步配置为:所述卷收组件包括安装在箱体顶端的底座、转动安装在底座上的中心轴、套接固定在中心轴上的卷轮以及安装在箱体顶端且位于底座一侧的导向管,所述底座、导向管以及支架的中心点位于同一条线上,所述第二电机的轴连接固定一侧卷收组件的中心轴,所述连接轴两端分别与相对卷收组件中的中心轴端部连接固定。
20.通过采用上述技术方案,当第二电机转动时,带动一侧卷收组件中的中心轴进行转动,并通过连接轴带动另一侧的卷收组件中心轴进行同步的转动,中心轴转动带动卷轮进行转动。
21.本发明在一较佳示例中可以进一步配置为:所述钢丝绳一端固定在卷轮内壁上,另一端穿过导向管,并顺着滑轮伸入支架内与滑块的顶端固定连接。
22.通过采用上述技术方案,卷轮转动带动钢丝绳进行收卷,钢丝绳收卷带动滑轨向上进行移动,即带动夹持组件以及夹持组件上的agv运输卡车向上进行移动。
23.本发明在一较佳示例中可以进一步配置为:所述充电组件、电动伸缩杆、碰撞传感器、驱动组件以及第二电机通过电线与plc控制器电连接。
24.通过采用上述技术方案,方便plc控制器根据程序自动控制充电组件、电动伸缩杆、碰撞传感器、驱动组件以及第二电机进行运行。
25.通过采用上述技术方案,本发明所取得的有益效果为:1.本发明中,通过在箱体的内壁上呈阵列安装多个放置板,并在每个放置板的底端安装无线充电装置,增加了举升式充电装置中agv运输卡车的停放位置,从而能够同时对多辆agv运输卡车进行同时的充电,有效的提升了充电的效率。
26.2.本发明中,通过设置移动模块、固定模块以及提升模块,利用移动模块、固定模块以及提升模块三者之间的相互配合能够自动化的将平台上的agv运输卡车送入到相对应的放置板上,全程避免了人工操作,便捷快速,提升了自动化水平,进一步的提升了充电装置的使用效率。
27.3.本发明中,通过在放置板的两侧设置激光发射器以及激光接收器,当放置板上存在agv运输卡车时,激光发射器发出的激光被agv运输卡车阻挡,激光接收器无法接收到激光,此时plc控制器判断该放置板上存在agv运输卡车在进行充电,反之,激光发射器发射的激光被激光接收器接收,plc控制器即判断放置板上无agv运输卡车在进行充电,从而通过控制移动模块、固定模块以及提升模块将需要充电的agv运输卡车移动到该放置板上,实现充电空间的自动化配对,避免了人工干预,进一步的提升了智能化水平。
附图说明
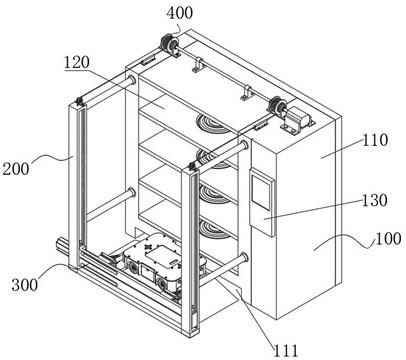
28.图1为本发明的右视结构示意图;图2为本发明的左视结构示意图;图3为本发明的前视示意图;图4为本发明的充电组件结构示意图;图5为本发明的部分结构示意图;图6为本发明的移动模块结构示意图;图7为本发明的固定模块结构示意图;图8为本发明的驱动组件结构示意图;图9为本发明的提升模块结构示意图。
29.附图标记:100、主体模块;110、箱体;111、凹槽;120、充电组件;121、放置板;122、无线充电装置;123、激光发射器;124、激光接收器;130、plc控制器;200、移动模块;210、电动伸缩杆;220、支架;221、滑槽;230、连接杆;240、平台;300、固定模块;310、滑块;320、滑轨;330、滑动件;331、螺纹孔;340、夹持组件;341、支杆;342、夹板;343、碰撞传感器;350、驱动组件;351、底板;352、第一电机;353、双头螺纹杆;400、提升模块;410、第二电机;420、连接轴;430、卷收组件;431、底座;432、中心轴;433、卷轮;434、导向管;440、滑轮;450、钢丝绳。
具体实施方式
30.为使本发明的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本发明进一步详细说明。需要说明的是,在不冲突的情况下,本发明的实施例及实施例中的特征可以相互组合。
31.下面结合附图描述本发明的一些实施例,参照图1-图9,一种卡车举升式充电装置,包括:主体模块100、移动模块200、固定模块300以及提升模块400,所述主体模块100包括箱体110、多个呈阵列安装在箱体110内壁上的充电组件120以及安装在箱体110外侧面上的plc控制器130,箱体110用于放置agv运输卡车,同时对agv运输卡车在充电时提供保护作用,避免外界因素的影响,充电组件120包括端部固定在箱体110内壁上的放置板121、安装在放置板121底端且穿过放置板121的无线充电装置122、安装在箱体110内壁上且位于放置板121一侧的激光发射器123以及安装在箱体110相对内壁上且位于放置板121另一侧的激光接收器124,放置板121用于放置agv运输卡车,保持agv运输卡车在充电时的稳定性,无线充电装置122用于对agv运输卡车进行无线充电,激光发射器123与所述激光接收器124位置相互对应,且二者位置均位于放置板121的横向中心线上,用于判断放置板121上是否存在agv运输卡车在进行充电,激光发射器123发出的激光被agv运输卡车阻挡,激光接收器124无法接收到激光,此时plc控制器130判断该放置板121上存在agv运输卡车在进行充电,反之,激光发射器123发射的激光被激光接收器124接收,plc控制器130即判断放置板121上无agv运输卡车在进行充电,plc控制器130接收与处理数据。
32.实施例一:结合图1、图2、图5、图6所示,移动模块200安装在箱体110上,用于带动agv运输卡车移动到箱体110内腔,包括多个呈对称安装在箱体110内壁上且伸出箱体110的电动伸缩杆210、安装在电动伸缩杆210端部上且对称设置的支架220、两端分别与相对支架220底端连接固定的连接杆230以及安装在连接杆230靠近箱体110一侧的平台240,电动伸缩杆210一端安装在箱体110内壁上,另一端伸出箱体110与支架220固定,且每个支架220至少与两个电动伸缩杆210进行固定,保持支架220在移动过程中的稳定性,在支架220的相对内壁上开有滑槽221,用于方便固定模块300进行移动,保持固定模块300在移动过程中的稳定性,连接杆230用于将相对的支架220连接在一起,使之形成一个整体,平台240与连接杆230平行的横截面呈等腰梯形,且两侧斜面的倾斜角度为十七度,用于方便agv运输卡车进行停放,从而方便固定模块300进行夹持固定,横截面呈等腰梯形设置且斜面设置为十七度,方便agv运输卡车移动到平台240上,箱体110的底端开有横截面呈矩形的凹槽111,凹槽111的宽度与高度略大于平台240的长度与高度,用于电动伸缩杆210带动支架220进行收缩时存放平台240。
33.实施例二:结合图1、图2、图7、图8所示,在实施例一的基础上,固定模块300滑动设置在支架220上,用于固定agv运输卡车,保持agv运输卡车在移动过程中的稳定性,包括滑动设置在支架220内的滑块310、两端分别与相对支架220内滑块310固定的滑轨320、对称且滑动设置在滑轨320上的滑动件330、安装在滑动件330外侧面上的夹持组件340以及安装在滑块310的外侧面上且穿过滑块310伸入滑轨320内腔的驱动组件350,滑块310嵌合在滑槽221内滑动,保持滑块310在移动时保持稳定性,滑轨320两侧与相对支架220内的滑块310固定,用于
安装滑动件330,同时用于带动滑动件330进行移动,滑动件330对称设置在滑轨320上,用于安装夹持组件340,夹持组件340包括端部固定在滑动件330外侧面上的支杆341、安装在支杆341远离滑动件330端部上的夹板342以及安装在夹板342竖侧面上的碰撞传感器343,支杆341用于安装夹板342,夹板342的横截面呈l状,且水平面长度为竖直面长度的两倍,用于夹持固定agv运输卡车,保持agv运输卡车在移动过程中的稳定性,碰撞传感器343用于检测夹板342是否触摸到agv运输卡车,从而控制驱动组件350是否停止驱动,驱动组件350包括安装在一侧滑块310上的底板351、安装在底板351上的第一电机352以及一端与第一电机352轴连接另一端伸入滑轨320的双头螺纹杆353,底板351用于安装第一电机352,保持第一电机352在工作时的稳定性,第一电机352用于驱动双头螺纹杆353进行转动,在滑动件330的端部开有螺纹孔331,双头螺纹杆353穿过螺纹孔331且与螺纹孔331相互啮合,使第一电机352转动时,带动双头螺纹杆353进行转动,双头螺纹杆353转动带动滑动件330块进行相向的移动,从而带动安装在滑动件330上的夹持组件340进行相向的移动,将agv运输卡车夹持固定住。
34.实施例三:结合图1、图2、图9所示,在实施例二的基础上,提升模块400安装在箱体110上,用于带动固定模块300进行上下的移动,包括安装在箱体110顶端的第二电机410、对称安装在箱体110顶端的卷收组件430、端部分别与相对卷收组件430相连接的连接轴420、安装在支架220顶端的滑轮440以及一端套接在卷收组件430上另一端通过滑轮440与滑块310顶端连接固定的钢丝绳450,第二电机410用于驱动卷收组件430进行转动,从而进行收卷与释放作业,卷收组件430包括安装在箱体110顶端的底座431、转动安装在底座431上的中心轴432、套接固定在中心轴432上的卷轮433以及安装在箱体110顶端且位于底座431一侧的导向管434,底座431、导向管434以及支架220的中心点位于同一条线上,第二电机410的轴连接固定一侧卷收组件430的中心轴432,连接轴420两端分别与相对卷收组件430中的中心轴432端部连接固定,底座431用于安装中心轴432,保持中心轴432在转动时的稳定性,中心轴432用于安装卷轮433,同时方便卷轮433进行转动,卷轮433用于收卷钢丝绳450,导向管434用于对钢丝绳450的移动进行导向,保持钢丝绳450在收卷过程中的稳定性,滑轮440用于方便钢丝绳450进行转向伸入到支架220内,钢丝绳450一端固定在卷轮433内壁上,另一端穿过导向管434,并顺着滑轮440伸入支架220内与滑块310的顶端固定连接,使卷轮433转动带动钢丝绳450进行收卷,钢丝绳450收卷带动滑轨320向上进行移动,即带动夹持组件340以及夹持组件340上的agv运输卡车向上进行移动。
35.本发明的工作原理及使用流程:使用时,当agv运输卡车需要进行充电时,将agv运输卡车移动到平台240上,此时放置板121一侧的激光发射器123发出的激光,当被agv运输卡车阻挡,激光接收器124无法接收到激光,此时plc控制器130判断该放置板121上存在agv运输卡车在进行充电,反之,激光接收器124接收到激光发射器123发射的激光,plc控制器130即判断放置板121上无agv运输卡车在进行充电,即确定将需要充电的agv运输卡车移动到该放置板121上,此时第一电机352启动,第一电机352转动带动双头螺纹杆353进行转动,双头螺纹杆353转动带动两侧的滑动块相向进行移动,即带动夹持组件340进行相向的移动,当夹板342竖侧面上的碰撞传感器343与agv运输卡车的侧面碰撞时,此时第一电机352停止转动,夹板342从两端将agv运输卡车托起并固定住,之后第二电机410启动,第二电机
410转动带动一侧卷收组件430中的中心轴432进行转动,并通过连接轴420带动另一侧的卷收组件430中心轴432进行同步的转动,中心轴432转动带动卷轮433进行转动,卷轮433转动带动钢丝绳450进行收卷,钢丝绳450收卷带动滑轨320向上进行移动,即带动夹持组件340以及夹持组件340上的agv运输卡车向上进行移动,将agv运输卡车移动到放置板121的位置后停止,之后电动伸缩杆210启动,同时卷轮433的收卷速度与电动伸缩杆210的收缩速度相等,保持夹持组件340上的agv运输卡车能够稳定的送入到放置板121上,之后第一电机352驱动夹板342松开,无线充电装置122开始对放置板121上的agv运输卡车进行充电,完成充电流程。
36.尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解,在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
