1.本实用新型属于水下作业机器人技术领域,具体涉及一种结构稳定的水下机器人框架。
背景技术:
2.随着科学技术不断提高,人类已经把海洋作为生存和发展的新领域,水下机器人,应用于海洋牧场,用来代替潜水员从事危险的水下作业,尤其是用于海洋牧场、涉水基础设施检测、水下环境监测等,解决人工效率随机性、成本高、风险大这一困扰我国蓝色经济发展的严重问题。因为经常需要搭载不同种类的仪器或工具潜水,一般被设计成开放式框架结构主体,海域环境比较复杂,水下作业机器人的运动会受到许多阻碍,为了保证水下机器人结构牢固可靠,通常都采用一体化焊接,当机器人遭受异物撞击时,因对动力系统以及控制系统产生伤害,机器人未采取制动的情况下,导致整体框架局部受损、变形,导致水下机器人重心的偏移,不利于水下作业,须上岸维修,因一体化焊接的整体式框架不利于局部维修、修正,导致框架整体报废,形成资源浪费,成本较高。
技术实现要素:
3.为了克服背景技术中因一体化焊接的整体式框架不利于局部维修、修正,导致框架整体报废,形成资源浪费,成本较高的问题,本实用新型提供一种结构稳定的水下机器人框架,通过将亚克力的板材进行切割形成其上下左右四块,采用螺丝和角铁连接的方式组装,可避免机器人遭受异物撞击时对动力系统以及控制系统产生伤害,增强其稳定性,当局部受损、变形无法维修时,可单独更换相应的框架板,避免框架整体报废,提高利用率,降低维修成本。
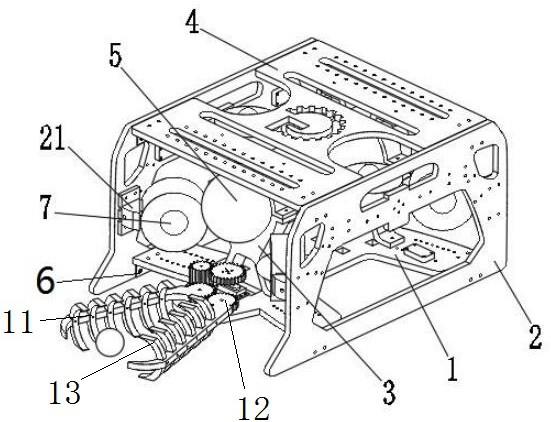
4.为实现上述目的,本实用新型是通过如下技术方案实现的:一种结构稳定的水下机器人框架主要包括底板1、侧板2、主舱固定架3、顶板4、角铁6,两个主舱固定架3通过螺丝安装在底板1上,主舱固定架3上设有与机器人主舱匹配安装的安装孔31,顶板4通过螺丝安装在两个主舱固定架3的顶部,侧板2的底部和顶部分别通过角铁6和螺丝安装在底板1和顶板4同侧的边部,两个侧板2分别处于机器人主舱的两侧。
5.所述的侧板2前部、中部、后部均设有用于安装推进器的安装座21,底板1、侧板2和顶板4上对应推进器的位置为保证推进效果采用镂空设计。
6.所述的主舱固定架3为方便安装的分体式套体,设有与底板1和顶板4连接的法兰。
7.所述的底板1前端安装有操作装置;所述的操作装置包括夹持抓11、传动齿轮12、驱动电机,所述的夹持抓11端部固定连接有传动齿轮12,传动齿轮12可转动安装在底板1前端,两个传动齿轮12相啮合,驱动电机安装在底板1上,驱动电机与传动齿轮12传动连接,所述的夹持抓11上均匀设有弧形的抓齿13。
8.本实用新型的有益效果:
9.本实用新型通过将亚克力的板材进行切割形成其上下左右四块,采用螺丝和角铁
连接的方式组装,可避免机器人遭受异物撞击时对动力系统以及控制系统产生伤害,增强其稳定性,当局部受损、变形无法维修时,可单独更换相应的框架板,避免框架整体报废,提高利用率,降低维修成本。
附图说明
10.图1是本实用新型工作状态立体示意图。
11.图2是本实用新型立体示意图。
12.图3是本实用新型底板、侧板和主舱固定架立体示意图。
具体实施方式
13.为了使本实用新型的目的、技术方案和有益效果更加清楚,下面将结合附图,对本实用新型的优选实施例进行详细的说明,以方便技术人员理解。
14.本实用新型公开了一种结构稳定的水下机器人框架,所述的一种结构稳定的水下机器人框架主要包括底板1、侧板2、主舱固定架3、顶板4、角铁6,两个主舱固定架3通过螺丝安装在底板1上,主舱固定架3上设有与机器人主舱5匹配安装的安装孔31,顶板4通过螺丝安装在两个主舱固定架3的顶部,侧板2的底部和顶部分别通过角铁6和螺丝安装在底板1和顶板4同侧的边部,两个侧板2分别处于机器人主舱的两侧;通过将亚克力的板材进行切割形成其上下左右四块,采用螺丝和角铁连接的方式组装,可避免机器人遭受异物撞击时对动力系统以及控制系统产生伤害,增强其稳定性,当局部受损、变形无法维修时,可单独更换相应的框架板,避免框架整体报废,提高利用率,降低维修成本;通过一种聚丙烯材料制作来抵抗海水腐蚀,对抗阻力。
15.所述的侧板2前部、中部、后部均设有用于安装推进器7的安装座21,底板1、侧板2和顶板4上对应推进器的位置为保证推进效果采用镂空设计,顶板4镂空为对称半圆镂空,此设计可帮助人工在携带机器时给手部提供一着力点的同时又可以保证框架整体受力均匀。
16.所述的主舱固定架3为方便安装的分体式套体,设有与底板1和顶板4连接的法兰,通过螺丝的方式加紧,这样的设计方式可以节省舱体下半部分空间,进而缩小框架体积,进一步增加便携性。
17.新的固定连接方式给机器带来更强劲的稳定性,发明中在框架挖出的人手贴合部分使机器更加便于携带,在提高其工作性能的前提下保持美观,制作时使用聚丙烯来抵抗海水腐蚀,对抗阻力。
18.所述的底板1前端安装有操作装置;所述的操作装置包括夹持抓11、传动齿轮12、驱动电机,所述的夹持抓11端部固定连接有传动齿轮12,传动齿轮12可转动安装在底板1前端,两个传动齿轮12相啮合,驱动电机安装在底板1上,驱动电机与传动齿轮12传动连接,所述的夹持抓11上均匀设有弧形的抓齿13,通过驱动电机和传动齿轮12驱动两个夹持抓11相向或相背摆动,实现目标物体的抓取和放置,结构简单,工作可靠。
19.最后说明的是,以上优选实施例仅用以说明本实用新型的技术方案而非限制,尽管通过上述优选实施例已经对本实用新型进行了详细的描述,但本领域技术人员应当理解,可以在形式上和细节上对其作出各种各样的改变,而不偏离本实用新型权利要求书所
限定的范围。
技术特征:
1.一种结构稳定的水下机器人框架,其特征在于:所述的结构稳定的水下机器人框架包括底板(1)、侧板(2)、主舱固定架(3)、顶板(4)、角铁(6),两个主舱固定架(3)通过螺丝安装在底板(1)上,主舱固定架(3)上设有与机器人主舱匹配安装的安装孔(31),顶板(4)通过螺丝安装在两个主舱固定架(3)的顶部,侧板(2)的底部和顶部分别通过角铁(6)和螺丝安装在底板(1)和顶板(4)同侧的边部,两个侧板(2)分别处于机器人主舱的两侧。2.如权利要求1所述的一种结构稳定的水下机器人框架,其特征在于:所述的侧板(2)前部、中部、后部均设有用于安装推进器的安装座(21),底板(1)、侧板(2)和顶板(4)上对应推进器的位置为保证推进效果采用镂空设计。3.如权利要求1或2所述的一种结构稳定的水下机器人框架,其特征在于:所述的主舱固定架(3)为方便安装的分体式套体,设有与底板(1)和顶板(4)连接的法兰。4.如权利要求1或2所述的一种结构稳定的水下机器人框架,其特征在于:所述的底板(1)前端安装有操作装置。5.如权利要求4所述的一种结构稳定的水下机器人框架,其特征在于:所述的操作装置包括夹持抓(11)、传动齿轮(12)、驱动电机,所述的夹持抓(11)端部固定连接有传动齿轮(12),传动齿轮(12)可转动安装在底板(1)前端,两个传动齿轮(12)相啮合,驱动电机安装在底板(1)上,驱动电机与传动齿轮(12)传动连接,所述的夹持抓(11)上均匀设有弧形的抓齿(13)。
技术总结
本实用新型涉及一种结构稳定的水下机器人框架,属于水下作业机器人技术领域。主要包括底板、侧板、主舱固定架、顶板、角铁,两个主舱固定架通过螺丝安装在底板上,主舱固定架上设有与机器人主舱匹配安装的安装孔,顶板通过螺丝安装在两个主舱固定架的顶部,侧板的底部和顶部分别通过角铁和螺丝安装在底板和顶板同侧的边部,两个侧板分别处于机器人主舱的两侧;通过将亚克力的板材进行切割形成其上下左右四块,采用螺丝和角铁连接的方式组装,可避免机器人遭受异物撞击时对动力系统以及控制系统产生伤害,增强其稳定性,当局部受损、变形无法维修时,可单独更换相应的框架板,避免框架整体报废,提高利用率,降低维修成本。降低维修成本。降低维修成本。
技术研发人员:王曜瑄 石丛玮 邓云 吴晓峰 陈少涵 谢晨曦
受保护的技术使用者:北京龙诚智航科技有限公司
技术研发日:2022.09.28
技术公布日:2022/12/6
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
