1.本实用新型属于船舶水下清洁设备技术领域,具体涉及一种船舶清洁机器人。
背景技术:
2.随着我国海上贸易的逐步增长,被投入到航海运输行业中的船只越来越多,船舶在海洋长期航行的过程中,船舶的表面上会附着有大量的海洋生物及海洋垃圾形成的附着物,一方面,附着物会破坏船舶表面的防腐层,导致造成船舶的使用寿命下降,另一方面,附着物会加重船舶的重量,导致航行速度降低,航行能耗增大。
3.对船舶的表面的附着物进行清洁,能够有效地解决上述技术问题,目前船舶表面的清洁方式主要是通过人工操作的方式实现清洁,在工人进入水下进行清洁的过程中,一方面,由于海浪的实时变化,工人需要在克服海浪变化进行清洁作业,工人操作难度高、作业危险系数高、人工成本高、劳动强度高;另一方面,船舶表面上的附着物分布无规律,在船体的不同区域附着物的淤积程度各不相同,工人需要根据不同工况采用不同的清洁方式进行船舶表面的清洁,进一步增加工人的操作难度、劳动强度高、且清洁效率低下。
技术实现要素:
4.本实用新型的目的在于提供一种船舶清洁机器人,该船舶清洁机器人能够适应船舶表面的不同作业工况的清洁处理,替代传统的人工清洁,降低人工成本投入,提高清洁效率。
5.实现上述目的包括如下技术方案。
6.本实用新型提供了一种船舶清洁机器人,包括主体,在所述主体上设有两个行走机构,该两个所述行走机构设于所述主体的两侧,在所述行走机构上设有吸附单元;
7.在所述主体的顶面上形成有安装面,在所述主体的底面和行走机构的底端之间形成有清洁区域,在所述安装面上设有清刷机构,所述清刷机构包括旋转驱动件,所述旋转驱动件固定在所述安装面上,在所述旋转驱动件的底部上传动连接有清刷头,所述清刷头设于所述清洁区域的内;
8.在所述清刷机构上设有空化清洗机构,所述空化清洗机构设于所述清洁区域内,或所述空化清洗机构朝向所述清洁区域。
9.在其中一些实施例中,所述清刷机构包括固定座,所述固定座设于安装面上,所述固定座的底端穿过所述主体朝向所述清洁区域,在所述固定座内形成有容置腔,在所述容置腔内设有转动件,在所述固定座的上方设有所述旋转驱动件,所述旋转驱动件至少部分伸入所述容置腔内与所述转动件传动连接,在所述固定座的底部设有所述清刷头,所述清刷头的底端与所述转动件固定连接,所述清刷头的底端与所述行走机构的底端平齐。
10.在其中一些实施例中,在所述主体上设有固定架,所述固定架架设在所述固定座的上方,所述旋转驱动件的顶端穿过所述固定架延伸到所述固定架的上方,在所述旋转驱动件上外套有防扭套,在所述固定架上固设有外套在所述防扭套上的防扭座。
11.在其中一些实施例中,在所述主体上开设有两个相对设置的第一通孔,在所述主体上靠所述第一通孔位置处设有两个相对设置的安装块,在所述安装块上设有连接轴,在所述固定座的外壁上设有两个相对设置的连接块,所述连接轴的另一端与所述连接块连接。
12.在其中一些实施例中,所述空化清洗机构包括第一连接板和第二连接板,所述第一连接板和第二连接板拼合连接形成有安装腔及贯穿所述第一连接板和第二连接板的第二通孔,所述第一连接板和第二连接板套设在所述清刷机构上,在所述安装腔内设有超声波换能器,在所述超声波换热器上连接有压电片。
13.在其中一些实施例中,在所述主体上设有图像反馈机构,所述图像反馈机构包括设于所述主体两端的第一摄像头和第二摄像头,在所述主体上靠所述第一摄像头或第二摄像头的一端设有显示灯,在所述显示灯上或所述主体上固设有光度传感器。
14.在其中一些实施例中,在所述主体上相对所述清刷机构一端设有辅助清洁机构,所述辅助清洁机构包括两个固设在所述主体上的连接套,在所述连接套背离所述主体的一端上设有转动轴,在所述转动轴上套设有摆动杆,在两个所述摆动杆之间设有连接杆,所述摆动杆的端部套设在所述连接杆上,且在所述连接杆上套设有清洁刷辊,所述清洁刷辊可沿所述连接杆的周向方向转动。
15.在其中一些实施例中,在所述主体上开设有第三通孔,在所述第三通孔上方设有安装座,在所述安装座内形成有容纳孔,在所述容纳孔内设有旋转电机,在所述旋转电机上传动连接有旋叶推进器,在所述清洁区域内设有套体,所述套体的顶部与所述主体连接形成有收集仓,在所述套体上开设有导通所述收集仓的收集槽,及导通所述收集仓的进水口,在所述进水口位置处设有隔网。
16.在其中一些实施例中,在所述主体上设有控制机构,所述控制机构包括控制盒,在所述控制盒内设有控制电路板,所述控制电路板分别与所述清刷机构、所述空化清洗机构及所述行走机构连接。
17.在其中一些实施例中,所述行走机构包括固定板,所述固定板设于所述主体两侧,在所述固定板上固设有行走电机,在所述行走电机的电机轴上套设有主动齿轮,在所述固定板相对所述行走电机的一端设有活动块,在所述活动块上设有从动连杆,在所述从动连杆上套设有从动齿轮,在所述主动齿轮和从动齿轮上套设有行走链条,在所述行走链条上设有多个所述吸附单元。
18.本实用新型所提供的船舶清洁机器人,通过在主体的顶面上形成安装面,在主体的底面和行走机构的底端之间形成清洁区域,在主体的安装面上设置清刷机构,清刷机构的清刷头设于清洁区域内,在清刷机构上设置空化清洗机构,该空化清洗机构设置在清洁区域内或朝向清洁区域设置;在使用时,根据船体表面的海洋垃圾和/或海洋生物的淤积情况,控制空化清洗机构和/清刷机构启动,在船体表面仅仅附着有细小的海洋生物和/或海洋垃圾的区域清洁时,单独启动空化清洗机构,对海水的分子进行空化处理,进而通过空化核破裂时产生的冲击力对船体表面附着的海洋生物和/或海洋垃圾的附着性能进行破坏,实现对船体表面的清洁处理;在船体表面附着的海洋生物和/或海洋垃圾的淤积程度较为严重的区域清洁时,单独启动清刷机构,通过旋转驱动件运作驱动清刷头转动对船体的表面进行刷洗,或同时清刷机构和空化清洗机构,在刷洗的同时配合空化作用对船体表面的
孔洞,细缝等清刷头无法刷洗的部分进行清洁处理;使得该船舶清洁机器人能够适应船舶表面的不同作业工况的清洁处理,替代传统的人工清洁,降低人工成本投入,提高清洁效率。
19.本实用新型所提供的船舶清洁机器人,通过在主体上设置图像反馈机构,图像反馈机构的第一摄像头和第二摄像头运作实时监控船体表面的海洋垃圾和/或海洋生物的淤积情况,反馈到该舶清洁机器人,该舶清洁机器人根据不同的海洋垃圾和/或海洋生物的淤积情况,选择单独启动清刷机构或空化清洗机构,或同时启动清刷机构和空化清洗机构对船体的表面进行清洁处理,提高清洁处理的效率以及清洁效果,当然也可以通过图像反馈机构将图像信息传送到地面控制室,操作人员可根据海洋垃圾和/或海洋生物的根据附着情况手动选择启动清刷机构和/或空化清洗机构,避免该船舶清洁机器人判断错误的情况发生,同时在使用时采用光度传感器检测该船舶清洁机器人的作业环境的光照情况控制显示灯运作,为第一摄像头和第二摄像头的拍摄提供光源。
附图说明
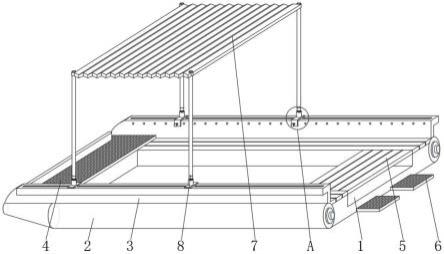
20.图1是本实用新型的结构示意图;
21.图2是本实用新型的分解图;
22.图3是本实用新型的清刷机构和空化清洗机构的分解图;
23.图4是本实用新型的连接座的分解图;
24.图5是本实用新型的辅助吸附机构的分解图;
25.图6是本实用新型的行走机构的分解图。
26.附图标记说明:
27.10、主体;101、第一通孔;102、第一通槽;103、第三通孔;104、安装块;105、连接轴;106、控制盒;
28.20、清刷机构;201、固定座;2011、连接块;2012、第一限位凸块;202、容置腔;203、旋转驱动件;204、转动件;205、清刷头;206、固定架;207、防扭套;208、防扭座;
29.30、空化清洗机构;301、第一连接板;302、第二连接板;303、安装腔;304、第二通孔;305、压电片;306、第二限位凸块;
30.401、第一摄像头;402、第二摄像头;403、显示灯;404、光度传感器;405、安装套;
31.50、辅助吸附机构;501、安装座;502、容纳孔;503、旋转电机;504、旋叶推进器;505、套体;506、收集仓;507、收集槽;508、进水口;509、隔网;510、连接底盘;511、固定杆;
32.60、辅助清洁机构;601、清洁刷辊;602、连接套;603、转动轴;604、摆动杆;605、连接杆;
33.70、行走机构;701、行走电机;702、固定板;7021、插接凸块;7022、锁定槽;7023、调节槽;7024、第一过孔;7025、榫卯块;703、行走链条;7031、链节;704、主动齿轮;705、从动齿轮;706、从动连杆;707、连接座;7071、嵌接槽;7072、避空槽;708、吸附单元;709、防滑板;
34.80、张紧机构;801、张紧块;802、张紧杆;803、活动块;8031、第二过孔;8032、固定孔;
35.901、承载板;902、转动副;903、支撑块;904、榫卯槽;905、延伸板。
具体实施方式
36.为了便于理解本实用新型,下面将参照说明书附图对本实用新型的具体实施例进行更详细的描述。
37.除非特别说明或另有定义,本文所使用的“第一、第二
…”
仅仅是用于对名称的区分,不代表具体的数量或顺序。
38.除非特别说明或另有定义,本文所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
39.需要说明的是,本文中“固定于”、“连接于”,可以是直接固定或连接于一个元件,也可以是间接固定或连接于一个元件。
40.参照图1至6,本实施例所提供的船舶清洁机器人,包括主体10,在主体10的两侧设有用以在船体表面上行走的行走机构70,在行走机构70上设有用以吸附在船体表面上的吸附单元708,在主体10的顶面形成有安装面,在主体10的底面与行走机构70的底端之间形成有清洁区域。
41.参考图6,行走机构70包括设于主体10两侧的固定板702,在固定板702上固设有行走电机701,在行走电机701的电机轴上套设有主动齿轮704,在固定板702相对行走电机701的一端设有活动块803,在活动块803上设有从动连杆706,在从动连杆706上套设有从动齿轮705,在主动齿轮704和从动齿轮705上套设有行走链条703,在行走链条703的每个链节7031上均设有连接座707,在连接座707上背离行走链条703的一端开设有嵌接槽7071,在嵌接槽7071内设有吸附单元708,在吸附单元708背离行走链条703的一端固设有防滑板709。
42.本实施例的吸附单元708为钕磁铁,防滑板709为q235钢板,在防滑板709背离吸附单元708的一端形成有多个防滑纹。
43.在固定板702的顶端设有多个插接凸块7021,在主体10的两侧设有多个第一通槽102,插接凸块7021插入第一通槽102内,且插接凸块7021的顶端延伸到主体10的顶面上方,在该延伸到主体10的顶面上方的部分开设有锁定槽7022,在锁定槽7022内插入有锁定块(图未示,下同),利用锁定块抵压在主体10的顶面,限制插接凸块7021在第一通槽102内的升降,实现固定板702与主体10之间的连接固定,提高固定板702和主体10的拆装便捷性。
44.在固定板702上开设有第一过孔7024,行走电机701与固定板702靠主体10的一侧螺接固定,行走电机701的电机轴穿过第一过孔7024延伸到固定板702背离主体10的一侧与主动齿轮704连接。
45.本实施例的固定板702上开设有多个镂空槽,且固定板702的底部呈拱形设置,在提高固定板702的承受荷载的同时降低固定板702的重量,减少材料投入。
46.在固定板702的底部设有向下延伸的榫卯块7025,在固定板702的底部设有两个相对设置的支撑块903,在支撑块903上开设有榫卯槽904,榫卯块7025插入榫卯槽904内与支撑块903榫卯连接。
47.在连接座707朝向主体10的一侧开设有避空槽7072,支撑块903朝向固定板702的一端伸入避空槽7072内,且本实施例的支撑块903的端部至少伸入三个连接座707的避空槽7072内,使得至少三个链节7031之间无法转动形成整体结构,三个吸附单元708同时吸附船体表面,提高行走结构的吸附能力,进而提高行走机构70的行走稳定性。
48.在支撑块903背离固定板702的一端设有向上延伸的延伸板905,在延伸板905和固
定板702之间设有承载板901,承载板901呈弧形,在承载板901的顶端和两端位置处均设有转动副902,位于承载板901顶端的转动副902与固定板702连接,位于承载板901两端的转动副902与延伸板905连接,在使用时,承载板901利用三个转动副902的转动特性使得承载板901能够沿转动副902的周向方向转动,适配行走机构70在不同凹凸状态的船体表面上行走,并对主体10的作用于行走机构70的荷载进行分散处理。
49.在固定板702上设有张紧机构80,张紧机构80包括设于活动块803侧部的张紧块801,在张紧块801上设有张紧杆802,张紧杆802的端部朝向活动块803,在使用时,通过张紧杆802朝向活动块803发生活动推动活动块803在固定板702上活动,进而带动从动齿轮705活动实现行走链条703的张紧。
50.在活动块803设有设有第二过孔8031,从动连杆706穿过第二过孔8031与从动齿轮705连接,并在活动块803设有设有固定孔8032,在固定板702上对应固定孔8032的位置处开设有调节槽7023,活动块803通过螺栓结构穿过固定孔8032和调节槽7023与固定板702连接,利用螺栓可在调节槽7023内活动实现活动块803被张紧杆802推动下在固定板702上活动的目的。
51.本实施例张紧杆802可以是张紧螺杆,通过手动旋拧的方式实现行走链条703的张紧,也可以采用电动推杆、气压杆及气缸等结构,实现行走链条703的自动张紧。
52.参考图2和图3,在主体10上开设有两个相对设置的第一通孔101,在主体10上对应第一通孔101的位置处设有清刷机构20,清刷机构20包括固定座201,固定座201设于第一通孔101内,且第一通孔101的直径大于固定座201的直径,在主体10的安装面上靠第一通孔101的位置处设有两个相对设置的安装块104,在固定座201的外壁上设有两个相对设置的连接块2011,连接块2011和安装块104通过连接轴105实现连接,且连接轴105的一端固设在安装块104上,另一端与连接块2011可转动连接,或连接轴105的一端固设在连接块2011上,另一端与安装块104可转动连接,使得固定座201在第一通孔101的限位范围内可沿连接轴105的周向方向转动一定角度,避免固定座201底部的清刷头205在碰触淤积在船体表面的海洋垃圾或海洋生物时由于无法活动导致损坏的情况发生。
53.在固定座201内开设有容置腔202,在容置腔202内设有转动件204,在转动件204上方设有旋转驱动件203,旋转驱动件203与转动件204传动连接,转动件204的底部与清刷头205传动连接。
54.本实施例的旋转驱动件203为驱动电机,在第一通孔101的上方架设有固定架206,旋转驱动件203的顶端穿过固定架206延伸到固定架206的上方,且在旋转驱动件203上外套有防扭套207,在固定架206上固定有外套在防扭套207上的防扭座208,在使用时,当该船舶清洁机器人进入水下对船体的表面进行清洁处理时,在不同水下深度的情况下及清刷头205与淤积的海洋垃圾和/或海洋生物碰撞时,保持旋转驱动件203的位置的稳定,避免清刷头205由于旋转驱动件203的偏移导致偏心,降低清刷机构20的清刷效果的情况发生。
55.固定座201的底端延伸到清洁区域内,清刷头205的底端与行走机构70的底端平齐,在固定座201延伸到清洁区域内的部分套设有空化清洗机构30,空化清洗机构30包括第一连接板301和第二连接板302,第一连接板301和第二连接板302拼合连接形成有安装腔303及贯穿第一连接板301和第二连接板302的第二通孔304,第一连接板301和第二连接板302套设在清刷机构20上,在安装腔303内设有超声波换能器(图未示,下同),在超声波换热
器上连接有压电片305。
56.在固定座201的外周壁上设有多个第一限位凸块2012,在第一连接板301或第二连接板302上设有多个向第二通孔304方向延伸的第二限位凸块306,当固定座201伸入第二通孔304内时,第一限位凸块2012抵压在第二限位凸块306上,并通过螺栓或螺丝的方式连接固定。
57.本实施例的压电片305为陶瓷压电片305,在第一连接板301或第二连接板302上开设有供压电片305容置的容置孔(图未示,下同)。
58.本实施例的空化清洗机构30也可采用超声波工业振头替代超声波换能器和压电片305,只要能够实现对船体的表面上的孔位及细缝进行清洁处理即可,并不仅限于本实施例记载的技术方案。
59.参考图1,在主体10相对与清刷机构20的一端上设有辅助清洁机构60,辅助清洁机构60包括两个固设在主体10上的连接套602,在连接套602背离主体10的一端上设有转动轴603,在转动轴603上套设有摆动杆604,在两个摆动杆604之间设有连接杆605,摆动杆604的端部套设在连接杆605上,且在连接杆605上套设有清洁刷辊601,清洁刷辊601可沿连接杆605的周向方向转动。
60.在使用时,当清刷机构20和空化清洗机构30无法清洁船体表面上的附着物时(例如海藻、藤壶及其他难以清理的海洋生物等),通过清洁刷辊601刷洗,提高该船舶清洁机器人的清洁效果和清洁效率。
61.参考图1、图4及图5,在主体10上开设有第三通孔103,在在第三通孔103上方设有安装座501,在安装座501内形成有容纳孔502,在容纳孔502内设有旋转电机503,在旋转电机503上传动连接有旋叶推进器504,在清洁区域内设有套体505,套体505的顶部与主体10连接形成有收集仓506,在套体505上开设有导通收集仓506的收集槽507,及导通收集仓506的进水口508,在进水口508位置处设有隔网509。
62.在安装座501的底部设有连接底盘510,在连接底盘510的外周壁上设有多个呈环状阵列分布的固定杆511,固定杆511朝向安装座501方向延伸,且固定杆511与安装座501连接,并部分延伸到安装座501外,旋转电机503通过螺栓或螺丝的方式与连接底盘510连接固定,固定杆511延伸到安装座501外的部分通过螺栓或螺丝的方式与主体10连接固定。
63.在使用时,利用旋转电机503运作带动旋叶推进器504转动,通过水流流动产生水压差,弥补当吸附单元708吸附力不足时行走机构70与船体表面的吸附力,同时将船体表面的附着物通过收集槽507吸入收集仓506内,进一步提高该船舶清洁机器人的清洁效果和清洁效率,同时收集到收集仓506内的海洋生物或海洋垃圾能带来一定经济收益。
64.在主体10上设有控制机构,控制机构包括固设在主体10的安装面上的控制盒106,设置在控制盒106内的控制电路板,控制电路板直接或通过分电板连接清刷机构20、辅助清洁机构60、空化清洗机构30、辅助吸附机构50、图像反馈机构及行走机构70,用以实现该船舶清洁机器人对船体表面附着物的自动监测和自动清洁。
65.在主体10的安装面上设有图像反馈机构,图像反馈机构包括设于主体10两端的第一摄像头401和第二摄像头402,在主体10上靠第一摄像头401或第二摄像头402的一端设有显示灯403,在显示灯403上或主体10上固设有光度传感器404。
66.在显示灯403上靠近主体10的一侧设有两个相对设置的安装套405,安装套405套
设在主体10上,安装套405通过螺栓或螺丝的方式固定在主体10上。
67.在使用时能够利用第一摄像头401和第二摄像头402实时监控船体上的附着物情况及对海水进行水文监测,并反馈到控制电路板,控制电路板根据接收的信息选择启动清刷机构20和/或空化清洗机构30,并根据情况启动辅助吸附机构50辅助清刷机构20和/或空化清洗机构30对船体表面进行清洁处理;亦可通过控制电路板或图像反馈机构直接将图像信息反馈到地面控制站,通过人工的方式判断船体表面的附着物淤积情况,避免由于水下环境及光照的影响导致控制电路板判断出现误差,造成船体表面附着物的清洁不到位的情况。
68.本实施例的显示灯403为led显示灯403。
69.本实施例的主体10上开设有多个镂空槽和镂空孔,用以降低主体10的重量,并在辅助清洁机构60运作时增加水流流动途径,提高行走机构70对船体表面的吸附力。
70.本实施例所提供的船舶清洁机器人,在使用时,
71.船舶清洁机器人在主体10两侧的行走机构70上的吸附单元708的作用下吸附在船体的表面上;
72.图像反馈机构的第一摄像头401和第二摄像头402实时拍摄船体表面的海洋生物和/或海洋垃圾附着物的淤积情况(在光度传感器404检测到水下关照不足时启动显示灯403),反馈到控制电路板和/或地面控制站;
73.控制电路板或地面控制站根据接收到的图像信息判断船体表面的附着物情况,根据不同的附着物淤积情况选择启动清刷机构20和/或空化清洗机构30,对船体表面的附着物进行清洁处理。
74.当船体表面上附着的海洋垃圾或海洋生物体积较小,和/或船体上具有较多的盲孔和细缝时,启动空化清洗机构30往船体的表面上发射超声波,利用超声波对海水的加速、空化和直进流作用使污物(海洋垃圾或海洋生物)乳化、分散并从物体表面剥离出来(破坏海洋垃圾或海洋生物与船体表面的吸附),使得海洋垃圾或海洋生物脱离船体表面实现船体表面的清洁处理;
75.当船体表面上附着的海洋垃圾或海洋生物的淤积程度较为严重时,关闭超声波发生机构,启动驱动电机驱动清洁刷转动,对船体的表面进行刷洗;
76.当船体表面的上同时具备淤积较为严重的海洋垃圾或海洋生物的区域,及海洋垃圾或海洋生物体积较小的区域时,同时启动超声波发生机构和驱动电机带动清洁刷转动对船体的表面进行清洁处理。
77.当船舶在水中长期航行,其表面吸附大量如海藻、藤壶、贝类等难以清理的海洋生物时,同时启动空化清洗机构30和清刷机构20也可能无法达到较佳的船体表面清洁效果时,调节辅助清洁机构60的摆动杆604在转动轴603周向上的角度,使得清洁刷辊601抵压在船体表面上,在行走机构70带动主体10在船体表面上行走时,推动船体表面上的海洋生物,使其脱离船体的表面。
78.当吸附单元708遇到能够淤积的海洋生物或海洋垃圾厚度较厚,吸附能力减弱甚至消失时,启动辅助吸附机构50,利用安装座501内的旋转电机503运作带动旋叶推进器504运作,通过导通主体10的第三通孔103,实现水流从清洁区域到安装面上方的流动,增强该船舶清洁机器人的吸附能力,确保该船舶清洁机器人仍旧能够吸附在船体的表面上,避免
清洁机器人由于海洋生物或海洋垃圾淤积过多导致吸附力减弱或吸附力消失导致沉入水中的情况发生。
79.当然,在吸附单元708的吸附力充足的情况下亦可启动辅助吸附机构50,利用其吸附作用对船体表面进行辅助清洁处理,同时利用收集仓506收集部分附着物,在一定程度上增加船体表面清洁的经济效益。
80.本实施例所提供的船舶清洁机器人能够适应船舶表面的不同作业工况的清洁处理,替代传统的人工清洁,降低人工成本投入,提高清洁效率。
81.以上实施例也并非是基于本实用新型的穷尽性列举,在此之外,还可以存在多个未列出的其他实施方式。在不违反本实用新型构思的基础上所作的任何替换与改进,均属本实用新型的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。