1.本实用新型涉及到机器人技术领域,特别涉及到一种遥控侦察小车摆转控制机构。
背景技术:
2.行走履带特种机器人作为机器人的重要种类,是为承担反恐防爆、抗震救灾等特殊应、急任务需求开发的特种机器人装备,相较于普通机器人,行走履带特种机器人对越障能力提出了更高的要求,需要具备强大的处置能力、足够的越障能力和便捷的控制手段。为保证系统越障能力,现有技术主要从结构上进行改进,以在结构上留出冗余,增强行进越障能力,出现了行走履带式、轮式、复合摆臂式、轮腿复合式等多种构型的行走履带特种机器人,复合摆臂式行走履带机器人是现行搜救、排爆行走履带机器人的典型构型。
3.本技术是对专利申请202221926406.9的进一步优化,202221926406.9所要求保护的遥控侦察小车采用两个摆转舵机控制摆转履带轮进行摆转,其同步摆转效率存在不足,遥感控制较难,需要进一步优化摆转时履带轮的同步性。
技术实现要素:
4.本实用新型要解决的技术问题是:解决上述存在的技术问题,提供一种摆转同步率高、减少摆臂虚位的遥控侦察小车摆转控制机构。
5.本实用新型解决其技术问题所采用的技术方案是:
6.一种遥控侦察小车摆转控制机构,包括设置在遥控侦察小车的主体框架内部的摆转控制主体,摆转控制主体包括摆转舵机、减速齿轮、摆转齿轮和连接轴,摆转舵机通过摆转舵机轴连接减速齿轮,减速齿轮啮合摆转齿轮,摆转齿轮经所述连接轴连接侦察小车两侧的摆转机构。
7.作为优选的,所述连接轴与摆转齿轮通过卡件抱死设置。
8.作为优选的,所述摆转机构为摆转履带轮,摆转履带轮包括摆臂主动轮、摆臂从动轮和摆臂履带,摆臂履带覆盖于摆臂主动轮和摆臂从动轮上,并与二者啮合;通过摆转舵机控制摆臂主动轮旋转,从而带动摆臂履带和摆臂从动轮旋转。
9.作为优选的,所述连接轴连接两侧的摆臂主动轮,摆转舵机通过驱动减速齿轮转动,带动摆转齿轮及连接轴转动控制摆转履带轮旋转。
10.作为优选的,所述连接轴还连接行走履带轮,行走履带轮设置在主体框架与摆转履带轮之间。
11.作为优选的,所述行走履带轮包括行驶驱动轮、行驶从动轮和行走履带,行走履带覆盖于行驶驱动轮和行驶从动轮上,并与二者啮合;连接轴穿过行驶从动轮的部分套接有第一轴承和第一固定法兰。
12.作为优选的,所述连接轴穿过摆臂主动轮的部分套接有第二轴承和第二固定法兰,第二轴承和第二固定法兰之间夹设有摆臂外板,摆臂外板一端连接摆臂主动轮,另一端
连接摆臂从动轮。
13.作为优选的,其特征在于,所述主体框架整体不超出两侧摆转机构的外缘。
14.作为优选的,所述主体框架包括金属边框和塑料盖板,塑料盖板通过密封件与金属边框粘接,摆转控制主体的高度未超过塑料盖板至相对面之间的高度。
15.本实用新型的有益效果:
16.(1)采用一个摆转舵机控制,增添一个减速齿轮,在不改变力矩的情况下,使摆臂的速度减小,通过一个连接轴连接两侧的摆转机构,保证摆转机构的同步摆转效率。
17.(2)通过将连接轴与摆转齿轮的连接处抱死设置,有效减少摆臂虚位。
附图说明
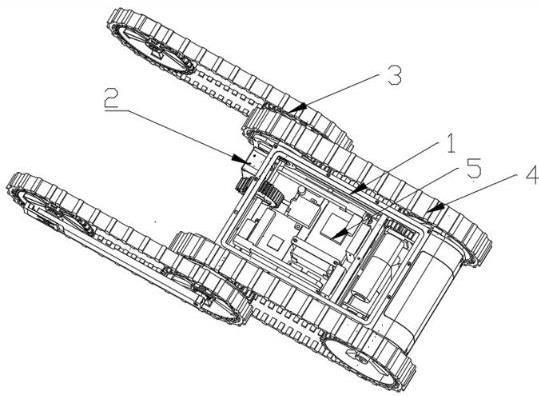
18.图1为一种遥控侦察小车的内部结构示意图;
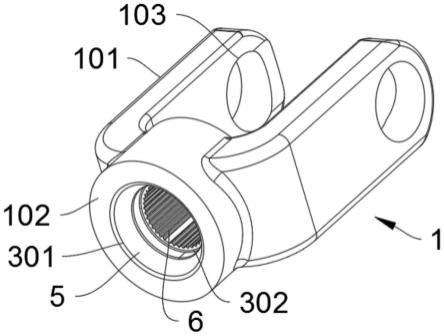
19.图2为一种遥控侦察小车摆转控制机构的结构示意图;
20.上述附图标记:1、主体框架;101、金属边框;2、摆转控制主体;201、摆转舵机;202、减速齿轮;203、摆转齿轮;204、连接轴;3、摆转履带轮;301、摆臂主动轮;302、摆臂履带;303、摆臂外板4、行走履带轮;401、行走从动轮;402、行走履带;5、电气控制模块。
具体实施方式
21.以下结合附图及实施例对本实用新型作进一步说明,但这些具体实施方案不以任何方式限制本实用新型的保护范围。
22.实施例1
23.如图1-2所示,一种遥控侦察小车摆转控制机构2,包括设置在遥控侦察小车的主体框架1内部的摆转控制主体2,摆转控制主体2包括摆转舵机201、减速齿轮202、摆转齿轮203和连接轴204,摆转舵机201设置在侦察小车的主体框架1的内部并通过摆转舵机轴连接减速齿轮202,减速齿轮202啮合摆转齿轮203,摆转齿轮203中穿设连接轴204,连接轴204穿出侦察小车的主体框架1并连接侦察小车两侧的摆转机构。具体来说,遥控侦察小车的主体框架1内装有电气控制模块5、驱动机构、摄像模块、充电模块和摆动机构,摆动机构设置在电气控制模块5和充电模块之间且与驱动机构相对设置;摆动控制机构与电气控制模块5电连接,并采用一个摆转舵机201控制,增添一个一级减速的减速齿轮202,实现了在不改变力矩的情况下,使摆臂的速度减小,并且通过一个连接轴204连接两侧的摆转机构,保证摆转机构的同步摆转效率。
24.另外,连接轴204与摆转齿轮203的连接处通过常规的卡件(图未示出)将连接轴204与摆转齿轮203抱死设置,其目的在于,在摆转齿轮203旋转时,避免摆转齿轮203和连接轴204之间存有缝隙或因齿轮内表面或轴表面光滑导致打滑使同步效率降低,故将连接轴204与摆转齿轮203的连接处设置一个卡件将连接轴204与摆转齿轮203抱死设置,确保摆转齿轮203转动时,带动连接轴204控制摆转机构转动,有效减少摆臂虚位。
25.在本实施例中,摆转机构为摆转履带轮3,摆转履带轮3包括摆臂主动轮301、摆臂从动轮和摆臂履带302,摆臂履带302覆盖于摆臂主动轮301和摆臂从动轮上,并与二者啮合;通过摆转舵机201控制摆臂主动轮301旋转,从而带动摆臂履带302和摆臂从动轮旋转;其中连接轴204连接穿设两侧的摆臂主动轮301,摆转舵机201通过驱动减速齿轮202转动,
带动摆转齿轮203及连接轴204转动控制摆转履带轮3旋转。
26.在本实施例中,连接轴204还穿设行走履带轮4,行走履带轮4设置在主体框架1与摆转履带轮3之间,行走履带轮包括行驶驱动轮、行驶从动轮401和行走履带402,行走履带402覆盖于行驶驱动轮和行驶从动轮401上,并与二者啮合;连接轴204穿设行驶从动轮401的部分套接有第一轴承(图未示出)和第一固定法兰(图未示出)。
27.在本实施例中,连接轴204穿过摆臂主动轮301的部分套接有第二轴承(图未示出)和第二固定法兰(图未示出),第二轴承和第二固定法兰之间夹设有摆臂外板303,摆臂外板303一端连接摆臂主动轮301,另一端连接摆臂从动轮,摆臂外板303固定摆臂主动轮301和摆臂从动轮,保证了摆转的同步性,还防止在摆转过程中摆臂主动轮301或摆臂从动轮发生碰撞导致散架。
28.在本实施例中,主体框架1整体不超出两侧摆转履带轮3的外缘,同样本实施例中,行走履带轮4的长度和摆转履带轮3相同,主体框架1整体也未超出两侧行走履带轮4的外缘,其目的在于,将主体框架1整体长度设置为不大于两侧连接的行走履带轮4或摆转履带轮3的长度,在机器人工作时,即使遇上障碍物,也会优先受到行走履带轮4或摆转履带轮3的阻挡,尽可能地避免了机器人的主体结构撞上障碍物。同时,主体框架1包括金属边框101和塑料盖板(图未示出),塑料盖板通过黏合剂粘连密封件连接金属边框101,摆转控制主体2的高度未超过塑料盖板至相对面之间的高度,其目的在于,一、在摆转机构的作用下,遥控侦察小车180
°
翻转,其原车底面会翻转成为侦察车的顶面,因此将摆转机构内的摆转舵机201、减速齿轮202和摆转齿轮203限制在主体框架1内,防止翻转车身后,凸出的摆转机构部分容易碰撞到地面或者其他障碍物,二、采用塑料盖板,可以增加信号传输的穿透性,保证遥感控制顺利进行。
29.上述方案中的一种遥控侦察小车摆转控制机构所能取得的有益效果是,
30.(1)采用一个摆转舵机控制,增添一个减速齿轮,在不改变力矩的情况下,使摆臂的速度减小,通过一个连接轴连接两侧的摆转机构,保证摆转机构的同步摆转效率。
31.(2)通过将连接轴与摆转齿轮的连接处抱死设置,有效减少摆臂虚位。
32.(3)将摆转控制主体限制在主体框架内,防止小车在翻转时撞击到外物导致毁损。
33.以上显示和描述了本发明创造的基本原理、主要特征及优点。本行业的技术人员应该了解,本发明创造不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明创造的原理,在不脱离本发明创造精神和范围的前提下,本发明创造还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。