1.本发明涉及一种共焦成像系统,特别涉及一种拉曼光谱仪的共焦成像系统,属于光学成像技术领域。
背景技术:
2.激光共焦拉曼光谱是用来分析物质组分﹑结构等的一种有效光谱分析手段,其原理是入射激光会引起分子(或晶格)产生振动而损失(或获得)部分能量,致使散射光频率发生变化对散射光的分析,即拉曼光谱分析,可以探知分子的组分,结构及相对含量等,因此被广泛成为分子探针技术。该仪器是在1960后产生的,他的光源采用激光,这样增加了拉曼信号的强度,增强了信号的的强度,使拉曼光谱扩大了适用范围。目前拉曼光谱已成为现代材料结构分析的基本技术手段。
3.现有技术中共聚焦拉曼光谱仪通过重复转动光栅,使期反射出的拉曼光谱在感光元件处移动,随时间形成波形通过电信号后记录保存。但由于光栅转动的重复性,时间一长就会导致光谱偏移,使得实验数据产生误差。现有的解决方法是通过工作人员定时调整光栅,其调整光栅的过程非常费时费力。
技术实现要素:
4.为此,需要提供一种拉曼光谱波数自动校准装置,包括壳体、激光发射器、第一反射镜、第二反射镜、光栅组件、和光信号接收组件。上述激光发射器、第一反射镜、第二反射镜、光栅组件、和光信号接收组件装配在壳体内。上述第一反射镜非邻接地安装在激光发射器发射方向,第一反射镜镜面与激光非垂直设置。上述光栅组件非邻接地装配于上述第一反射镜反射激光的方向,上述第二反射镜非邻接地装配于光栅组件处理光线后的光源发射方向,第二反射镜镜面与该光线非垂直设置。上述光信号接收组件非邻接得装配于上述第二反射镜反射光线方向。上述第二反射镜设置为聚拢光线的镜面,上述光信号接收组件装配在第二反射镜反射出光线的聚焦处。上述光栅组件包括光栅转动机构、光栅和电限位器,上述光栅转动机构装配在壳体内,上述电限位器装配在上述光栅转动机构内部,上述光栅装配于光栅转动机构的转动功能区,上述电限位器配套附设有光信号触发构件,上述光信号触发构件装配在上述光信号接收组件内。通关设置上述电限位器记录上述光栅的初始状态为零点位置,再将上述的光信号触发构件装配在光信号接收组件的特定位置。每当上述激光发射器发出的激光通过上述第一反射镜、光栅组件、第二反射镜处理后的光线聚焦点移动至光信号触发构件处便能触发电限位器,电限位器控制上述光栅转动机构将光栅转动回零点位置,达到修正拉曼光谱波数偏移的效果。
5.进一步的,上述光栅转动机构包括驱动构件、转盘和固定架。上述驱动构件固定装配在壳体内,上述转盘装配于驱动构件,上述固定架装配于转盘,上述光栅与上述固定架可拆卸连接。
6.进一步的,上述光信号接收装置包括光改向组件和复数个感光元件,上述光改向
组件和复数个感光元件装配在壳体内。上述光改向组件装配在上述第二反射镜反射出光线的聚焦点前,感光元件装配在光改向组件改变或未改变的光线的聚焦点处。上述光信号触发构件装配于上述感光元件。
7.进一步的,上述改向组件由改向转动机构、连接杆、改向反射镜组成,上述连接杆设置为长柄状。上述感光元件包括第一感光元件和第二感光元件。上述改向转动机构装配在壳体内,连接杆一端与改向转动机构装配,上述改向反射镜装配于连接杆相对的另一端。上述改向反射镜镜面转动至与第二反射镜反射出的光线平行时,上述改向机构被设置为无法阻挡第二反射镜反射出的光线,上述第一感光元件装配于第二反射镜反射出的光线的聚焦点处。上述改向反射镜设置为镜面转动至与上述第二反射镜反射出的光线成特定夹角时,改向反射镜阻挡并改变第二反射镜反射出的光线方向,其改变后的光线聚焦点处装配第二感光元件。
8.进一步的,上述改向组件还包括阻挡构件,该阻挡构件固定设置在壳体内,并且阻挡构件设置于上述连接构件旋转方向同一水平面。当上述连接构件旋转至阻挡构件处,上述连接构件和阻挡构件相互抵接阻挡。
9.进一步的,上述改向组件包括至少两个阻挡构件,当上述改向反射镜旋转至与第二感光元件平行时,上述连接杆镜与上述阻挡构件抵接。当上述改向反射镜旋转至与上述第二反射镜反射出的光线成特定夹角时,上述连接杆与上述阻挡构件抵接。
10.进一步的,上述激光发射器为发散光源,上述第一反射镜设置为聚拢镜面。
11.分发明提供了一种上述拉曼光谱波数自动校准装置的自动校准方法:在上述拉曼光谱波数自动校准装置运行中,激光通过上述光栅分离出拉曼光谱后会被聚焦到上述光接收组件的处形成光点,该光点随着上述光栅的重复转动在上述光接收组件处移动从而形成拉曼光谱的波形图;本方法通设置上述电限位器,利用上述电限位器限制上述光栅组件初始状态为零点位置;再利用拉曼光谱中瑞利散射达到峰值时,其形成的光点必定经过光接收组件的固定位置这一特征,将上述光信号触发构件设置在上述该固定位置处;因此每当瑞利散射达到峰值时,装配有上述电限位器的上述光栅组件都会回归于零点位置。
12.上述技术方案具有以下有益效果:
13.1、通过电限位器初步找到光栅组件的零点位置,再将瑞利散射达到峰值时必定经过的像素点设置为电限位器的触发点,每当瑞利散射达到峰值时,电限位器都会将光栅组件回归于零点位置。如此就可以避免了光栅因为转动的重复性导致的光谱偏移,减少了因为光栅转动带来的误差。
14.2、因为光栅转动的重复性,通常需要工作人员员定时地进行人工校准,费时费力且需要一些额外的校准器硬件。通过电限位器实现自动校准后可以节省人力物力,节省成本。
附图说明
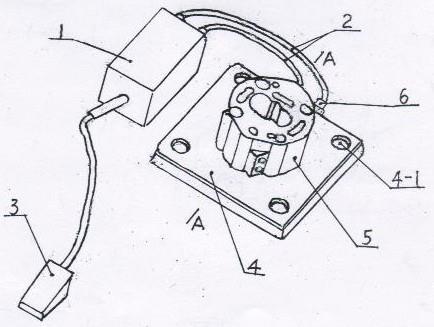
15.图1为使用本发明中拉曼光谱波数自动校准装置的结构示意图。
16.图2为使用本发明中拉曼光谱波数自动校准装置中第一感光元件接收光信号的光路传递示意图。
17.图3为使用本发明中拉曼光谱波数自动校准装置中第二感光元件接收光信号的光
路传递示意图。
18.图4为使用本发明中拉曼光谱波数自动校准装置中光信号接收组件的结构示意图。
19.图5为使用本发明中拉曼光谱波数自动校准装置中光栅组件的结构示意图。
20.附图标记说明:
21.1壳体,2激光发射器,3第一反射镜,4第二反射镜,5光栅组件,6光信号接收组件,51光栅转动机构,52光栅,61第一感光元件,62第二感光元件,63改向组件,511驱动构件,512转盘,513固定架,631改向转动机构,632连接杆,633改向反射镜,634阻挡构件。
具体实施方式
22.参考图1,一种拉曼光谱波数自动校准装置,包括壳体1、激光发射器2、第一反射镜3、第二反射镜4、光栅组件5、和光信号接收组件6。激光发射器2、光栅组件5、光信号接收组件6固定安装在壳体1内的同一侧,相对的另一侧则固定安装了第一反射镜3和第二反射镜4。
23.参考图2,激光发射器2发射的激光光源为点光源,第一反射镜3和第二反射镜4均为聚光反射镜,第一反射镜3将点状光源发出的光束聚集成直线激光光束,第二反射镜4将则接收的直线光束聚焦反射。
24.参考图1、图2,第一反射镜3非邻接地设置在激光发射器2激光发射方向;光栅组件5非邻接地设置在第一反射镜3反射的光线方向;第二反射镜4非邻接地设置在光栅组件5处理后的光线传播方向;而光信号接收组件6固定装配在第二反射镜4反射光束的聚焦点位置。
25.参考图1、图2、图3、图4,光信号接收组件6包括第一感光元件61、第二感光元件62和改向组件63。改向组件63包括改向转动机构631、连接杆632和改向反射镜633,连接杆632设置为长柄状。改向转动机构631固定装配在壳体1内,连接杆632一端和改向转动机构631装配,另一端则用于改向反射镜633的固定装配。如此改向反射镜633就能以改向转动构件为轴心在一平面内进行旋转,而第一感光元件61和第二反射镜4均设置在改向反射镜633的旋转平面的同一平面。当改向反射镜633转动至与第二反射镜4反射的光线成特定夹角时,改向反射镜633反射出的光线的聚焦点处固定设置第二感光元件62。当改向反射镜633旋转至与第二反射镜4反射出的光线平行时,改向组件63不再阻挡第二反射镜4反射出的光线。其中改向转动机构631优选为电控马达,改向反射镜633优选为平光反射镜,第一感光元件61和第二感光元件62优选为ccd或coms。改向反射镜633转动至与第二反射镜4反射的光线成特定夹角优选为45
°
夹角
26.参考图4,改向组件63还包括了两个改向组件634,两个改向组件634固定装配在壳体1内。当改向反射镜633顺时针旋转至与第二反射镜4反射的光线平行时,其中一改向组件634阻挡连接杆632顺时针旋转;当改向反射镜633逆时针转动至与第二反射镜4反射的光线成特定夹角时,另一改向组件634阻挡连接杆632逆时针旋转。连接杆632被两个改向组件634限制在该特定夹角内旋转。改向组件634的地设置,使改向反射镜633的限位变得容易:当改向转动构件驱动连接杆632顺时针旋转时,改向反射镜633必定停止在与第二反射镜4反射的光线平行的位置;当改向转动构件驱动连接杆632逆时针旋转时,改向反射镜633必
定停止在与第二反射镜4反射的光线成特定夹角的位置。
27.参考图5,光栅组件5包括光栅转动机构51、光栅52和电限位器,光栅转动机构51固定装配在壳体1内,电限位器固定装配在光栅转动机构51中。光栅转动机构51包括驱动构件511、转盘512和固定架513,驱动构件511固定装配在壳体1内,转盘512装配于驱动构件511,固定架513装配在于转盘512,光栅52通过固定架513与转盘512可拆卸装配。
28.参考图4、图5,电限位器附设有光信号触发构件(图中未画出),该光信号触发构件装配于第一感光元件61和\或第二感光元件62,光电信号触发构件与电位器电信号连接,其连接方式可为无限电信号连接或电线连接,光电信号触发构件的触发位置设置在第一感光元件61和\或第二感光元件62接收光信号的固定像素点位上。
29.本实例中,提到的“装配于壳体1内”其装配方式可以是焊接、铰接、螺栓结构或者可拆卸连接等,其具体装配方式均为现有技术中的常见技术,因此不在此再一一概述。
30.本实施例中,一种拉曼光谱波数自动校准装置实现拉曼光谱波数自动校准的原理和方法如下:
31.本装置实现记录拉曼光谱的原理:在本装置的运行过程中,激光发射器2的点状光源通过第一反射镜3反射出直线光束传弟至光栅52。光栅52将直线光束中不同波长的光以不同的角度反射向第二反射镜4,第二反射镜4将接收到的光线聚光反射至光信号接收组件6,光信号接收组件6中的第一感光元件61或第二感光元件62在接收到光信号后进行读写记录。通过光栅转动机构51转动光栅52,便能实现光信号在感光元件上移动,感光元件从而记录分析出对应的拉曼光谱。
32.拉曼光谱特性:感光元件在记录拉曼光谱的过程中,拉曼光谱中的瑞利散射达到峰值时,其光点会移动到一个固定的像素点上。拉曼激发的原理,激光作用在样品上时,返回的光路中存在瑞利散射和拉曼散射,瑞利散射固定在0波数位置,是对于激光的相对位移;无论是什么激光打在样品上,返回的瑞利散射信号一定在0波数位置;已知拉曼各波数在探测器上的分布像素位置(光栅分光原理和光路系统的设计),所以可以知道瑞利散射的像素位置。根据拉曼光谱特性,通过限位器限制光栅52的初始状态为零点位置,再将与电限位器适配的光信号感应构件装配在瑞利散射峰值必定会移动到的像素点上,每当瑞利散射达到峰值时,其光点都会移动到光信号感应构件处,从而触发电限位器。电限位器被触发后驱动光栅52转动构件将光栅52转动会零点位置。通过该方法,实现了本实施例的拉曼光谱波数自动校准。
33.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者终端设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者终端设备所固有的要素。在没有更多限制的情况下,由语句“包括
……”
或“包含
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者终端设备中还存在另外的要素。此外,在本文中,“大于”、“小于”、“超过”等理解为不包括本数;“以上”、“以下”、“以内”等理解为包括本数。
34.尽管已经对上述各实施例进行了描述,但本领域内的技术人员一旦得知了基本创
造性概念,则可对这些实施例做出另外的变更和修改,所以以上所述仅为本发明的实施例,并非因此限制本发明的专利保护范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。