一种带led光源射频等离子体手术刀
技术领域
1.本发明涉及射频等离子体手术刀相关技术领域,尤其是指一种带led光源射频等离子体手术刀。
背景技术:
2.自动控制低温双极射频消融治疗系统俗称等离子刀,被誉为医院耳鼻喉科最先进的“手术刀”,是目前耳鼻喉科治疗的新技术。等离子刀是一种微创低温消融技术,是第四代治疗鼻咽炎的物理医学设备,同时借助鼻内窥镜数字图像显示仪,能够清晰的显示立体定位,利用双极射频产生的能量,使射频电针两极之间的患处细胞迅速脱水,导致其分解而获得有效的组织减容和消除效果,可以实现切割、止血和冲洗的功能。
3.中国专利公开号为cn216090748u,授权公告日为2022年03月22日,公开了一种鼻中隔等离子手术刀及等离子手术设备,包括:手柄,所述手柄内设置有导线组件,所述导线组件的一端用于与外部电控设备电连接;刀头,所述刀头设置于所述手柄的一端,所述刀头用于伸入患者鼻腔;所述刀头远离所述手柄的端面上开设有抽吸口,所述抽吸口朝向所述手柄方向延伸出引流通道,所述引流通道依次贯穿所述刀头和所述手柄,所述引流通道远离所述刀头的一端用于与排吸设备连通,以将患处的液体进行清理,所述刀头上设置有多个射频电极丝,多个所述射频电极丝依序间隔环绕布置于所述抽吸口外缘上,所述射频电极丝与所述导线组件的另一端电连接,所述射频电极丝能够将患处的组织进行手术处理。
4.上述专利存在的不足是,现有的射频等离子体手术刀头通常采用固定的形式,无法根据不同手术角度的需求来调节刀头的朝向,灵活度较低。
技术实现要素:
5.本发明是为了克服现有技术中电器在使用过程中刀头无法根据不同手术角度的需求进行调节的不足,提供了一种刀头能根据不同手术角度的需求进行调节的带led光源射频等离子体手术刀。
6.为了实现上述目的,本发明采用以下技术方案:一种带led光源射频等离子体手术刀,它包括手柄和刀头,所述手柄的一端设有套管,所述套管的一端与手柄可拆卸连接,所述刀头位于套管的另一端外,所述刀头的一端上设有抽引孔和若干根以抽引孔为中心分布的射频电极丝,所述刀头的另一端设有与抽引孔相连通的引流管,所述引流管的一端与刀头固定连接,所述引流管的另一端贯穿套管后位于手柄内,所述手柄内可拆卸安装有驱动组件,所述引流管在驱动组件的驱动下与套管转动连接,所述手柄的另一端设有旋转接头和电路接口,所述旋转接头的一端位于手柄内且与手柄可拆卸连接,所述旋转接头位于手柄内的一端与引流管位于手柄内的一端转动连接,所述旋转接头的另一端位于手柄外,所述射频电极丝和驱动组件均与电路接口电连接。
7.所述手柄的一端设有套管,所述套管的一端与手柄可拆卸连接,所述刀头位于套管的另一端外,所述刀头的一端上设有抽引孔和若干根以抽引孔为中心分布的射频电极
丝,所述刀头的另一端设有与抽引孔相连通的引流管,所述引流管的一端与刀头固定连接,所述引流管的另一端贯穿套管后位于手柄内,所述手柄内可拆卸安装有驱动组件,所述引流管在驱动组件的驱动下与套管转动连接,所述手柄的另一端设有旋转接头和电路接口,所述旋转接头的一端位于手柄内且与手柄可拆卸连接,所述旋转接头位于手柄内的一端与引流管位于手柄内的一端转动连接,所述旋转接头的另一端位于手柄外,所述射频电极丝和驱动组件均与电路接口电连接。电路接口便于与外部主设备进行接电;刀头通过射频电极丝对病变组织进行清理;根据不同的手术角度,操作者控制手柄内的驱动组件工作,驱动组件通过引流管带动刀头旋转一定的角度,达到了刀头能根据不同手术角度的需求进行调节的目的;旋转接头位于手柄内的一端与引流管转动连接,利于引流管在驱动组件的驱动下相对于旋转接头产生旋转的同时,便于旋转接头位于手柄外的一端与排吸设备连接,排吸设备依次通过旋转接头、引流管和抽引孔抽取经刀头处理后的病变组织和组织液。
8.作为优选,所述驱动组件包括电机和减速箱,所述电机与电路接口电连接,所述电机与手柄可拆卸连接,所述电机的输出端通过减速箱可拆卸连接有主动齿轮,所述引流管位于手柄内的一端上套设有与主动齿轮相啮合的从动齿轮,所述从动齿轮与引流管可拆卸连接,所述引流管在电机的驱动下与套管转动连接。具体地,电机通过主动齿轮和从动齿轮的传动,带动引流管产生匀速旋转,同时使得刀头产生旋转,便以根据不同的手术角度改变操作方向,故在套管的保护作用下,通过手术刀内部驱动外部的刀头旋转,不会对人体产生较大的伤害,有利于保护人体,且利于提高实用性和操作的灵活度。
9.作为优选,所述手柄上设有正转开关和反转开关,所述电机分别通过正转开关和反转开关与电路接口电连接。操作者根据不同的手术角度,操控手柄上的正转开关或反转开关,有利于操作者根据人体内部的血管组织分布情况来进行电机的正转或反转,以保护人体内部的血管组织不被破坏,从而利于提高安全性能。
10.作为优选,所述从动齿轮上设有两块极性相反的磁铁,两块磁铁均位于从动齿轮的同一侧面上且以引流管为中心呈左右对称分布,所述磁铁与从动齿轮固定连接,所述手柄内设有与其中任意一块磁铁相对应的双极性霍尔传感器,所述双极性霍尔传感器与手柄可拆卸连接,所述双极性霍尔传感器与电路接口电连接。双极性霍尔传感器通过电路接口接到主设备的控制系统中;当操作者操控反转开关时,电机反转,同时从动齿轮也产生同步转动,当s极磁铁旋转到与双极性霍尔传感器相对应时,双极性霍尔传感器检测到s极,电机到达反转极限,此时双极性霍尔传感器传送信号于控制系统,控制系统控制电机停止工作,操作者按反转开关则无法继续反转;同理,当操作者操控正转开关时,电机正转,同时从动齿轮也产生同步转动,当n极磁铁旋转到与双极性霍尔传感器相对应时,双极性霍尔传感器检测到n极,电机到达正转极限,此时双极性霍尔传感器传送信号于控制系统,控制系统控制电机停止工作,操作者按正转开关则无法继续反转;该设计有利于避免操作者因分心产生误操作,手部一直按着正转开关或反转开关不放导致电机不停转动,一方面使得刀头不停在人体内部旋转,容易对血管组织造成较为严重的破坏,另一方面,使得手柄内部的导线、管路缠绕而造成损坏,故这样设计有利于提高对人体的安全保护效果,且利于保护手术刀不被损坏,延长使用寿命。
11.作为优选,所述引流管位于手柄内的一端上套设有滚动轴承,所述滚动轴承位于从动齿轮的侧面,所述引流管通过滚动轴承与手柄转动连接。根据实际需求滚动轴承可设
置单个或多个,滚动轴承的设置有利于减小引流管与手柄旋转的摩擦力,从而利于减小磨损,提高使用寿命。
12.作为优选,所述旋转接头位于手柄内的一端设有转动槽,所述转动槽的内侧壁上设有密封圈,所述引流管位于手柄内的一端与转动槽转动连接且通过密封圈与转动槽密封连接,所述旋转接头内设有与引流管内部相连通的通道。密封圈有利于防止引流管和转动槽的连接处渗液,从而保证手柄内部的清洁,利于内部电路的正常工作。
13.作为优选,所述套管的内侧壁上涂覆有特氟龙涂层,所述引流管通过特氟龙涂层与套管转动连接。采用特氟龙涂层有利于减小套管和引流管之间转动时的摩擦力,对引流管的转动起到一定的润滑作用,减小磨损,利于提高使用寿命。
14.作为优选,所述刀头上设有若干颗以抽引孔为中心均匀分布的led灯珠,所述led灯珠与射频电极丝在刀头的同一端上,所述 led灯珠位于射频电极丝的侧面,所述led灯珠与电路接口电连接。led灯珠设置在刀头上,可随刀头一起旋转,从而便于对不同角度的手术操作实时提供照明,便于操作者能够更清晰地观察人体内部状况,提高手术的安全性能和工作效率。
15.作为优选,所述手柄上设有控制开关一和控制开关二,所述射频电极丝通过控制开关一与电路接口电连接,所述led灯珠通过控制开关二与电路接口电连接。将控制开关一和控制开关二设施在手柄上,对射频电极丝和led灯珠的操控方便快捷。
16.作为优选,所述刀头与引流管之间所构成的夹角范围在120
°
~160
°
之间,所述抽引孔的一端与引流管相连通且设有若干块均匀分布的切割刀片,所述切割刀片的两端与抽引孔的内侧壁连接,所述抽引孔的另一端设有导向斜面。导向斜面便于经射频电极丝切割后的废弃组织在负压的作用下进入到抽引孔内起到一定的导向作用,同时在负压的作用下,进入到抽引孔内的组织进过若干块切割刀片的切割分块进入到引流管内,有利于防止产生堵塞,利于保证手术的顺利进行。
17.本发明的有益效果是:刀头能根据不同手术角度的需求进行调节;在套管的保护作用下,通过手术刀内部驱动外部的刀头旋转,不会对人体产生较大的伤害,利于保护人体,且利于提高实用性和操作的灵活度;操作者根据不同的手术角度,操控手柄上的正转开关或反转开关,有利于操作者根据人体内部的血管组织分布情况来进行电机的正转或反转,以保护人体内部的血管组织不被破坏,从而利于提高安全性能;有利于提高对人体的安全保护效果,且利于保护手术刀不被损坏,延长使用寿命;有利于防止引流管和转动槽的连接处渗液,从而保证手柄内部的清洁,利于内部电路的正常工作;采用特氟龙涂层有利于减小套管和引流管之间转动时的摩擦力,对引流管的转动起到一定的润滑作用,减小磨损;led灯珠便于对不同角度的手术操作实时提供照明,便于操作者能够更清晰地观察人体内部状况,提高手术的安全性能和工作效率;有利于防止产生堵塞,利于保证手术的顺利进行。
附图说明
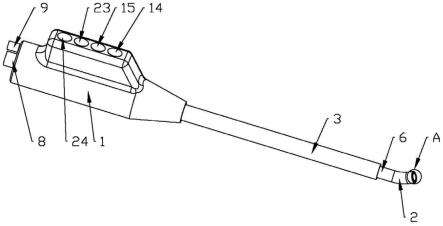
18.图1是本发明的结构示意图;图2是图1中a处的结构放大图;图3是本发明的正视图;
图4是图3中b-b的剖视图;图5是手柄的内部结构示意图;图6是图3中a-a的剖视图;图7是图4中b处的结构放大图。
19.图中:1. 手柄,2. 刀头,3. 套管,4. 抽引孔,5. 射频电极丝,6. 引流管,7. 驱动组件,8. 旋转接头,9. 电路接口,10. 电机,11. 减速箱,12. 主动齿轮,13. 从动齿轮,14. 正转开关,15. 反转开关,16. 磁铁,17. 双极性霍尔传感器,18. 滚动轴承,19. 转动槽,20. 密封圈,21. 通道,22. led灯珠,23. 控制开关一,24. 控制开关二,25. 切割刀片,26. 导向斜面。
具体实施方式
20.下面结合附图和具体实施方式对本发明做进一步的描述。
21.如图1和图3所述的实施例中,一种带led光源射频等离子体手术刀,它包括手柄1和刀头2,手柄1的一端设有套管3,套管3的一端与手柄1可拆卸连接,刀头2位于套管3的另一端外,如体1和图2所示,刀头2的一端上设有抽引孔4和若干根以抽引孔4为中心分布的射频电极丝5,刀头2的另一端设有与抽引孔4相连通的引流管6,如图4所示,引流管6的一端与刀头2固定连接,引流管6的另一端贯穿套管3后位于手柄1内,手柄1内可拆卸安装有驱动组件7,引流管6在驱动组件7的驱动下与套管3转动连接,手柄1的另一端设有旋转接头8和电路接口9,旋转接头8的一端位于手柄1内且与手柄1可拆卸连接,旋转接头8位于手柄1内的一端与引流管6位于手柄1内的一端转动连接,旋转接头8的另一端位于手柄1外,射频电极丝5和驱动组件7均与电路接口9电连接。
22.如图5所示,驱动组件7包括电机10和减速箱11,电机10与电路接口9电连接,电机10与手柄1可拆卸连接,电机10的输出端通过减速箱11可拆卸连接有主动齿轮12,引流管6位于手柄1内的一端上套设有与主动齿轮12相啮合的从动齿轮13,从动齿轮13与引流管6可拆卸连接,引流管6在电机10的驱动下与套管3转动连接。
23.如图1、图3和图5所示,手柄1上设有正转开关14和反转开关15,电机10分别通过正转开关14和反转开关15与电路接口9电连接。
24.如图6所示,从动齿轮13上设有两块极性相反的磁铁16,两块磁铁16均位于从动齿轮13的同一侧面上且以引流管6为中心呈左右对称分布,磁铁16与从动齿轮13固定连接,手柄1内设有与其中任意一块磁铁16相对应的双极性霍尔传感器17,双极性霍尔传感器17与手柄1可拆卸连接,双极性霍尔传感器17与电路接口9电连接。
25.如图5所示,引流管6位于手柄1内的一端上套设有滚动轴承18,滚动轴承18位于从动齿轮13的侧面,引流管6通过滚动轴承18与手柄1转动连接。
26.如图5所示,旋转接头8位于手柄1内的一端设有转动槽19,转动槽19的内侧壁上设有密封圈20,引流管6位于手柄1内的一端与转动槽19转动连接且通过密封圈20与转动槽19密封连接,旋转接头8内设有与引流管6内部相连通的通道21。套管3的内侧壁上涂覆有特氟龙涂层,引流管6通过特氟龙涂层与套管3转动连接。
27.如图2所示,刀头2上设有若干颗以抽引孔4为中心均匀分布的led灯珠22,led灯珠22与射频电极丝5在刀头2的同一端上, led灯珠22位于射频电极丝5的侧面,led灯珠22与
电路接口9电连接。
28.如图5所示,手柄1上设有控制开关一23和控制开关二24,射频电极丝5通过控制开关一23与电路接口9电连接,led灯珠22通过控制开关二24与电路接口9电连接。
29.如图4和图7所示,刀头2与引流管6之间所构成的夹角范围在120
°
~160
°
之间,抽引孔4的一端与引流管6相连通且设有若干块均匀分布的切割刀片25,切割刀片25的两端与抽引孔4的内侧壁连接,抽引孔4的另一端设有导向斜面26。
30.电路接口9便于与外部主设备进行接电;根据不同的手术角度,操作者操控手柄1上的正转开关14或反转开关15选择电机10正转或反转,电机10通过主动齿轮12和从动齿轮13的传动,带动引流管6产生匀速旋转,同时使得刀头2产生同步旋转,操作者松开正转开关14或反转开关15,使得刀头2旋转至相应位置处时停止继续旋转;操作者通过开启控制开关一23导通电路,刀头2通过射频电极丝5对病变组织进行清理;排吸设备抽取经刀头2处理后的病变组织和组织液,在负压的作用下,进入到抽引孔4内的组织进过若干块切割刀片25的切割分块进入到引流管6内,有利于防止产生堵塞,利于保证手术的顺利进行;在工作过程中,操作者可根据需求,通过控制开关二24开启led灯珠22,便于在手术操作过程中实时提供照明。
31.更进一步地,双极性霍尔传感器17通过电路接口9接到主设备的控制系统中;当操作者操控反转开关15时,电机10反转,同时从动齿轮13也产生同步转动,当s极磁铁16旋转到与双极性霍尔传感器17相对应时,双极性霍尔传感器17检测到s极,电机10到达反转极限,此时双极性霍尔传感器17传送信号于控制系统,控制系统控制电机10停止工作,操作者按反转开关15则无法继续反转;同理,当操作者操控正转开关14时,电机10正转,同时从动齿轮13也产生同步转动,当n极磁铁16旋转到与双极性霍尔传感器17相对应时,双极性霍尔传感器17检测到n极,电机10到达正转极限,此时双极性霍尔传感器17传送信号于控制系统,控制系统控制电机10停止工作,操作者按正转开关14则无法继续反转;该设计有利于避免操作者因分心产生误操作,手部一直按着正转开关14或反转开关15不放导致电机10不停转动,一方面使得刀头2不停在人体内部旋转,容易对血管组织造成较为严重的破坏,另一方面,使得手柄1内部的导线、管路缠绕而造成损坏,故这样设计有利于提高对人体的安全保护效果,且利于保护手术刀不被损坏,延长使用寿命。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。