1.本发明涉及水下仿生机器人控制领域,具体为一种基于海扁虫仿生的水下机器人以及抗干扰控制方法。
背景技术:
2.基于海扁虫仿生的水下机器人指的是根据海扁虫运动形态所设计的仿生机器人,模仿海扁虫波动式的推进方式,两侧柔性鳍面波动式运动,借助水的反作用进行推进。
3.此类基于海扁虫仿生的水下机器人,在水下运动时会受到自身运动所带动的水波以及周围各种水体变动的影响,导致此类基于海扁虫仿生的水下机器人会逐渐随着水波而偏离原先设定的运动路线。
4.对于此类基于海扁虫仿生的水下机器人,根据控制方式一般分为两种:一是利用主控芯片对于pwm参数值与初始设定值进行比较,从而改变pwm参数值,来达到控制此类机器人的要求;二是利用传感器对此类基于海扁虫仿生的水下机器人的姿态进行实时的测量并且传输至主控芯片,根据所设定的初始值与此类基于海扁虫仿生的水下机器人实时的姿态数值在主控芯片通过pid算法计算得到期望的pwm信号值,进而改变电机转速;前者对于水体的稳定性要求会更高,并且为了达到初始设定值可能会加大某一个方向的误差,但成本较低,而后者能更好的适应各种水体,并且能够更好的利用主控芯片的算力,为此我们提出了一种基于海扁虫仿生的水下机器人以及抗干扰控制方法。
技术实现要素:
5.(一)解决的技术问题
6.针对现有技术的不足,本发明提供一种基于海扁虫仿生的水下机器人以及抗干扰控制方法,以解决上述的问题。
7.(二)技术方案
8.为实现上述所述目的,本发明提供如下技术方案:
9.一种基于海扁虫仿生的水下机器人,包括头部、柔性主体骨架以及尾部,柔性主体骨架由多个关节组成,所述柔性主体骨架与尾部连接,头部设置在柔性主体骨架的一侧,且头部上设置有两根贯穿柔性主体骨架关节的尼龙线。
10.优选的,所述头部包括头部密封舱、摄像头、水下红外探头、舵机、舵机盘一以及舵机盘二,所述头部密封舱的左右两侧各设置一个水下红外探头,摄像头设置在两个水下红外探头之间,头部密封舱的内部设置有独立电源以及舵机,舵机盘二设置在舵机盘一的上方,舵机盘一设置在舵机的上方,两根所述尼龙线设置在舵机盘一上。
11.优选的,关节包括两个延长杆、两个连接部一、连接簧、d孔软轴连接头、连接套、凸轮关节、横轴端部固定块、连接横轴以及摆杆,两个延长杆对应两个连接部一连接孔位置上通过连接横轴转动连接在一起,且连接横轴的两端设置有横轴端部固定块,横轴端部固定块与连接部一卡接,两个连接部一插接有d孔软轴连接头,且d孔软轴连接头与连接部一插
接位置上设置有连接套,两个连接部一上的d孔软轴连接头与两个连接部一之间的凸轮关节端部插接在一起,相邻的两个关节中的d孔软轴连接头通过软轴连接在一起,两个所述延长杆相互靠近的一侧固定连接有摆杆,两个所述摆杆对应凸轮关节连接轴的位置上设置有连接缺口,连接缺口与凸轮关节活动连接,相邻的两个关节中的凸轮关节有九十度的偏差值,每个所述关节中同一侧的延长杆均通过零点二毫米的硅胶薄膜串联起来,尾部驱动带动软轴旋转,软轴带动凸轮关节进行旋转,凸轮关节在摆杆的连接缺口中上下挤压,驱动摆杆进行摆动,然后硅胶薄膜呈现波浪形摆动,最终形成波浪形的方式进行推进。
12.优选的,每个所述关节中相邻的两个连接部一通过连接簧连接在一起,每个所述延长杆的自由端上均设置有用穿插尼龙线的圆形孔洞。
13.优选的,所述头部包括电机舱、尾部密封舱以及密封舱盖板,电机舱设置在尾部密封舱的内部,且尾部密封舱的末端安装有密封舱盖板,且电机舱的内部设置有电机,电机与软轴连接。
14.进一步的,尾部密封舱内部设置有锂电池、姿态测量组件、pid控制器、l298n电机驱动模块以及lm2598降压模块,所述pid控制器与所述姿态测量组件共同连接好固定在尾部密封舱的上平面保持初始的水平状态。
15.进一步的,所述姿态测量组件为九轴陀螺仪,pid控制器为央处理芯片stm32f103,pid控制器与所述姿态测量组件设于一个密封舱内并且连接稳固后嵌入密封舱的上壁的孔洞中保证了电气连接的可靠。
16.一种基于海扁虫仿生的水下机器人抗干扰控制方法,包括以下步骤:
17.s1:实时获得水下机器人的姿态角;
18.s2:对不同大小的扰流进行抗干扰训练,得到本仿生机器人的pid参数;
19.s3:对姿态角进行误差分析,根据姿态角的误差值对水下机器人的电机以及舵机的输出进行调节;
20.s4:将姿态角输入神经网络进行训练,得到所期望的pid值,通过一定的pid算法得到要输出的pwm的信号值;
21.s5:根据pwm信号值对电机的正反转、推力进行调控以及舵机转动的角度,对水下机器人的姿态进行调节。
22.优选的,所述s2中的pid参数获取内容如下:
23.第一步:在不同的扰流大小下获取所述水下仿生机器人的初始姿态角;
24.第二步:将初始姿态角进行神经网络的训练,输出训练pid参数;
25.第三步:将训练的pid参数与所述初始姿态角相对应,确定pid参数列表。
26.优选的,所述s3中的姿态角进行误差分析包括以下步骤:
27.第一步:对姿态角进行数据滤波处理;
28.第二步:得到姿态角的误差值;
29.第三步:误差值用于表征姿态角与初始姿态角之间的差值。
30.优选的,所述s4中的通过pid算法计算得到pwm信号值包括以下步骤:
31.第一步:将姿态角输入所述pid控制器;
32.第二步:根据训练结果计算得到pid参数增量;
33.第三步:将pid参数增量与所述初始pid参数相加得到目标pid参数,目标pid参数
用于表征pid算法中下一次运算的初始pid参数;
34.第四步:根据目标pid参数对所述欧拉角进行pid计算,通过pid算法计算得到pwm信号值。
35.优选的,所述s5中的电机正反转对水下机器人的姿态调节:
36.当左右两个电机同时正转,驱使水下机器人向前运动;
37.当左右两个电机同时反转,驱使水下机器人向后运动。
38.优选的,所述s5中的舵机角度的调节,对水下机器人进行姿态的调节:
39.当舵机正转时仿生机器人向上弯曲,实现水下机器人整体上浮的功能;
40.当舵机反转时仿生机器人向上下曲,实现水下机器人整体上潜的功能。
41.(三)有益效果
42.与现有技术相比,本发明提供的基于海扁虫仿生的水下机器人抗干扰控制方法,具备以下有益效果:
43.1、该基于海扁虫仿生的水下机器人以及抗干扰控制方法,利用九轴传感器实时获得并传输水下仿生机器人的姿态角,并利用主控芯片通过pid算法对实时的姿态角进行计算得到期望的pwm信号值,进而不断对水下机器人的动作进行调整,可以保证水下机器人在运动时各个方向的平衡与稳定。
44.2、该基于海扁虫仿生的水下机器人以及抗干扰控制方法,通过对水下仿生机器人放入不同大小扰流进行抗干扰训练得到其初始的pid参数列表,并且通过神经网络进行训练能得到符合大部分复杂水体的pid参数。
45.3、该基于海扁虫仿生的水下机器人以及抗干扰控制方法,可以适应于大部分复杂的水体环境,也可以针对不同的水流干扰做出不同的抗干扰动作,如电机的正反转和舵机的角度旋转。
附图说明
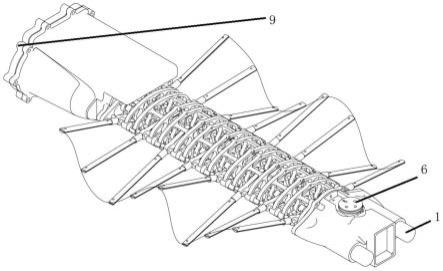
46.图1为本发明实施例海扁虫仿生的水下机器人立体结构示意图;
47.图2为本发明实施例海扁虫仿生的水下机器人另一视角的立体结构示意图;
48.图3为本发明实施例连接部一以及连接部二的结构示意图;
49.图4为本发明实施例d孔软轴连接头与软轴连接结构示意图。
50.图中:1、水下红外探头;2、摄像头;3、头部密封舱;4、舵机;5、舵机盘一;6、舵机盘二;7、电机舱;8、尾部密封舱;9、密封舱盖板;10、d孔软轴连接头;11、连接套;12、凸轮关节;13、横轴端部固定块;14、连接横轴;15、摆杆;16、延长杆;17、连接部一;18、连接簧;19、软轴。
具体实施方式
51.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
52.实施例
53.请参阅图1-4,本实施例提供的基于海扁虫仿生的水下机器人,包括头部、柔性主体骨架以及尾部,柔性主体骨架由多个关节组成,柔性主体骨架与尾部连接,头部设置在柔性主体骨架的一侧,且头部上设置有两根贯穿柔性主体骨架关节的尼龙线。
54.进一步的,头部包括头部密封舱3、摄像头2、水下红外探头1、舵机4、舵机盘一5以及舵机盘二6,头部密封舱3的左右两侧各设置一个水下红外探头1,摄像头2设置在两个水下红外探头1之间,头部密封舱3的内部设置有独立电源以及舵机4,舵机盘二6设置在舵机盘一5的上方,舵机盘一5设置在舵机4的上方,两根尼龙线设置在舵机盘一5上。
55.进一步的,关节包括两个延长杆16、两个连接部一17、连接簧18、d孔软轴连接头10、连接套11、凸轮关节12、横轴端部固定块13、连接横轴14以及摆杆15,两个延长杆16对应两个连接部一17连接孔位置上通过连接横轴14转动连接在一起,且连接横轴14的两端设置有横轴端部固定块13,横轴端部固定块13与连接部一17卡接,两个连接部一17插接有d孔软轴连接头10,且d孔软轴连接头10与连接部一17插接位置上设置有连接套11,两个连接部一17上的d孔软轴连接头10与两个连接部一17之间的凸轮关节12端部插接在一起,相邻的两个关节中的d孔软轴连接头10通过软轴19连接在一起,两个延长杆16相互靠近的一侧固定连接有摆杆15,两个摆杆15对应凸轮关节12连接轴的位置上设置有连接缺口,连接缺口与凸轮关节12活动连接,相邻的两个关节中的凸轮关节12有九十度的偏差值,每个关节中同一侧的延长杆16均通过零点二毫米的硅胶薄膜串联起来,尾部驱动带动软轴19旋转,软轴19带动凸轮关节12进行旋转,凸轮关节12在摆杆15的连接缺口中上下挤压,驱动摆杆15进行摆动,然后硅胶薄膜呈现波浪形摆动,最终形成波浪形的方式进行推进。
56.进一步的,每个关节中相邻的两个连接部一17通过连接簧18连接在一起,每个延长杆16的自由端上均设置有用穿插尼龙线的预留孔。
57.进一步的,头部包括电机舱7、尾部密封舱8以及密封舱盖板9,电机舱7设置在尾部密封舱8的内部,且尾部密封舱8的末端安装有密封舱盖板9,且电机舱7的内部设置有电机,电机与软轴19连接。
58.进一步的,尾部密封舱8内部设置有锂电池、姿态测量组件、pid控制器、l298n电机驱动模块以及lm2598降压模块,所述pid控制器与所述姿态测量组件共同连接好固定在尾部密封舱8的上平面保持初始的水平状态。
59.进一步的,所述姿态测量组件为九轴陀螺仪,pid控制器为央处理芯片stm32f103,pid控制器与所述姿态测量组件设于一个尾部密封舱8内并且连接稳固后嵌入密封舱的上壁的孔洞中保证了电气连接的可靠。
60.两根尼龙线按照舵机盘5中心点对称分布连接,左侧尼龙绳穿过所有关节的延长杆16上方预留孔并固定于最后一节关节中的延长杆16处,右侧尼龙线穿过所有关节的下方预留孔并固定于最后一节关节中的延长杆16处,当舵机盘5顺时针转动带动左侧的尼龙线缠绕上舵机盘5时,即左侧尼龙线收到牵拉而缩短,压缩整体关节上半部的间距,右侧尼龙线放松,整体关节下半部间距因上半部间距压缩而增大,从而实现整体弯曲,即使在整体弯曲的状态下,软轴19也能确保电机扭矩的传递。
61.一种基于海扁虫仿生的水下机器人抗干扰控制方法,包括以下步骤:
62.步骤1:实时获取所述水下仿生机器人的姿态角;
63.步骤2:将所述水下仿生机器人放入不同大小扰流进行抗干扰训练;将仿生水下机
器人投入到不同水流速度的水流下进行抗干扰训练,并利用上位机实时获取受到不同扰流干扰和水下仿生机器人自身运动带来的干扰前后的初始姿态角数据,并通过上位机对数据进行导出与整理,得到本仿生机器人的初始的pid参数列表;
64.步骤3:对所述水下仿生机器人在不同大小扰流进行抗干扰训练实时获取初始姿态角数据进行误差分析,据初始姿态角的误差值对水下仿生机器人的电机以及舵机4的输出进行调节,并获得在针对不同扰流下调节后的姿态角;
65.步骤4:将不同扰流下的初始姿态角和针对不同扰流下调节后的姿态角输入神经网络进行训练,得到所期望的pid值,通过一定的pid算法得到要输出的pwm的信号值;
66.步骤5:根据pwm信号值利用主控芯片对电机的正反转、推力进行调控以及舵机4转动的角度,对水下仿生机器人的姿态进行调节;
67.其中,将所述水下仿生机器人置于有不同的干扰水流的水下环境进行抗干扰训练,其中可以使用室内游泳池作为水下模拟环境,在水下使用不同大小的水流速度的水管喷口模拟不同的水波影响或是直接进行实地训练。在不同干扰环境下实时获取水下仿生机器人的初始姿态角,并将初始姿态角通过蓝牙传输至pid控制器中,通过wifi无线通信远程控制输出pid参数和初始姿态角,并将姿态角分解为相对于参考坐标系下的x轴、y轴、z轴的偏转值;并以pid参数与时间t进行函数分析,当pid参数的变化在一定的时间内趋于稳定时,记录下初始的pid参数;同时记录下所述水下仿生机器人的姿态角,即相对于参考坐标系下的x轴、y轴、z轴的角度值,并且与初始的参考坐标系下的x轴、y轴、z轴的角度值做差得到三轴的角度变化范围;得到pid参数列表。
68.作为一种优选的技术方案,上述步骤3中,对姿态角进行误差分析,包括:
69.对姿态角进行数据滤波处理,得到姿态角的误差值,所述误差值用于表征姿态角与初始姿态角之间的差值。
70.其中,姿态角的误差值为经过数据滤波处理后所得误差不断减小的姿态角,表示姿态角与参考坐标系x、y、z三轴的相对误差,在一定的时间内获取姿态角的最大值,并且需要确定在姿态角为最大值的情况下水下仿生机器人是否处于稳定运动状态,当最大值过大超出稳定范围时或是最大值过小时,则利用左右两个电机的正反转对于水的作用力的不同来快速减小误差,使水下机器人回到稳定状态。通过姿态测量组件bwt901可获取水下仿生机器人的姿态角,通过卡尔曼滤波算法对姿态角进行数据滤波处理,利用姿态角测量组件的实时传输姿态角的信息,降低噪声的干扰,得到更加精准的姿态角,能够减少系统误差,进而得到更为精确的姿态角的误差值。
71.作为一种优选的技术方案,上述步骤3中,据初始姿态角的误差值对水下仿生机器人的电机以及舵机4的输出进行调节,并获得在针对不同扰流下调节后的姿态角,包括:
72.当误差值大于零时,则使电机在初始运动状态的基础上调节为反转并且控制舵机4向下弯曲来使水下仿生机器人姿态角的误差值不断减小,并得到调整后的姿态角;
73.当误差值小于零时,则使电机在初始运动状态的基础上调节为正转并且控制舵机4向下弯曲来使水下仿生机器人姿态角的误差值不断减小,并得到调整后的姿态角。
74.作为一种优选的技术方案,上述步骤4中,将不同扰流下的初始姿态角和针对不同扰流下调节后的姿态角输入神经网络进行训练,得到所期望的pid值,通过一定的pid算法得到要输出的pwm的信号值,包括:
75.将调整前的姿态角输入所述pid控制器;
76.根据训练结果计算得到pid参数增量;
77.将pid参数增量与初始pid参数相加得到所述目标pid参数,所述目标pid参数用于表征pid算法中下一次运算的初始pid参数;
78.根据所述目标pid参数对所述欧拉角进行pid计算,通过pid算法计算得到pwm信号值。
79.其中将初始姿态角输入神经网络,初始姿态角作为初始值,神经网络根据学习公式进行训练计算,并计算得到的pid参数的增量。学习公式为:
80.△
w1(k)=n1z(k)x1(k)
81.△
w2(k)=n2z(k)x2(k)
82.△
w3(k)=n3z(k)x3(k)
83.x1(k)=e(k)
84.x2(k)=e(k-1)
85.x3(k)=e(k)-2e(k-1) e(k-2)
86.式中,
△
w1(k)、
△
w2(k)、
△
w3(k)
87.将神经网络计算所得的pid参数的增量与初始的pid参数相加得到新的初始pid参数,并更新相应初始的pid参数值,新的初始pid参数会作为下一次神经网络计算的初始pid参数值,按照这样的方法对pid参数进行迭代计算,最终神经网络输出期望的pid参数值,并通过设定迭代次数来调整最终的pid参数的值。迭代次数根据所允许的误差范围而定,初始的pid参数由pid参数表取得。根据期望的pid参数对姿态角进行增量式pid计算,通过pid算法计算得到pwm信号值。增量式pid计算公式为:
88.△
u(k)=kp*e(k-1) ki*e(k) kd*(e(k)-2e(k-1) e(k-2));
89.式中,
△
u(k)表示输出变化量,k表示正整数,kp表示比例系数,ki表示积分系数,kd表示微分系数,e(k-1)表示k-1次的目标和实际的误差值,e(k)表示k次的目标和实际的误差值,e(k-2)表示k-2次目标和实际的误差值。
90.作为一种优选的技术方案,根据pwm信号值对电机的正反转、推力进行调控以及舵机4转动的角度,对水下仿生机器人的姿态进行调节,包括:
91.根据所得的pwm信号值分别对两电机转速上的调节控制,其中记电机正转为正方向,则转速范围为(-170,170);根据流体力学,电机所连接的传动仿生机器人的鱼鳍所产生对水的正反向作用力也与转速的大小成正比;舵机4根据所放置的位置记相对于水平面向上为正角度,则舵机4旋转角度范围为(-90,90),利用舵机4转动角度来使水下仿生机器人整体向上或向下弯曲达到调整姿态的目的;根据pwm信号值所产生的不同占空比的pwm波对电机转速和舵机4旋转角度进行调整,由于本身所使用的的电源并没有超出电机和舵机4的承受范围,并不存在调节死区,所以并不需要设置pwm信号值的上下限。
92.本发明通过对水下仿生机器人放入不同大小扰流进行抗干扰训练得到其初始的pid参数列表,并且通过神经网络进行训练能得到符合大部分复杂水体的pid参数。
93.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
