技术特征:
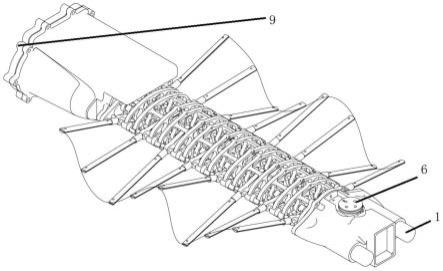
1.一种基于海扁虫仿生的水下机器人,其特征在于,包括头部、柔性主体骨架以及尾部,柔性主体骨架由多个关节组成,所述柔性主体骨架与尾部连接,头部设置在柔性主体骨架的一侧,且头部上设置有两根贯穿柔性主体骨架关节的尼龙线。2.根据权利要求1所述的基于海扁虫仿生的水下机器人,其特征在于:所述头部包括头部密封舱(3)、摄像头(2)、水下红外探头(1)、舵机(4)、舵机盘一(5)以及舵机盘二(6),所述头部密封舱(3)的左右两侧各设置一个水下红外探头(1),摄像头(2)设置在两个水下红外探头(1)之间,头部密封舱(3)的内部设置有独立电源以及舵机(4),舵机盘二(6)设置在舵机盘一(5)的上方,舵机盘一(5)设置在舵机(4)的上方,两根所述尼龙线设置在舵机盘一(5)上。3.根据权利要求1所述的基于海扁虫仿生的水下机器人,其特征在于:所述关节包括两个延长杆(16)、两个连接部一(17)、连接簧(18)、d孔软轴连接头(10)、连接套(11)、凸轮关节(12)、横轴端部固定块(13)、连接横轴(14)以及摆杆(15);两个延长杆(16)对应两个连接部一(17)连接孔位置上通过连接横轴(14)转动连接在一起,且连接横轴(14)的两端设置有横轴端部固定块(13),横轴端部固定块(13)与连接部一(17)卡接;两个连接部一(17)插接有d孔软轴连接头(10),且d孔软轴连接头(10)与连接部一(17)插接位置上设置有连接套(11),两个连接部一(17)上的d孔软轴连接头(10)与两个连接部一(17)之间的凸轮关节(12)端部插接在一起,相邻的两个关节中的d孔软轴连接头(10)通过软轴(19)连接在一起;两个所述延长杆(16)相互靠近的一侧固定连接有摆杆(15),两个所述摆杆(15)对应凸轮关节(12)连接轴的位置上设置有连接缺口,连接缺口与凸轮关节(12)活动连接,相邻的两个关节中的凸轮关节(12)有九十度的偏差值,每个所述关节中同一侧的延长杆(16)均通过零点二毫米的硅胶薄膜串联起来;每个所述关节中相邻的两个连接部一(17)通过连接簧(18)连接在一起,每个所述延长杆(16)的自由端上均设置有用穿插尼龙线的圆形孔洞。4.根据权利要求3所述的基于海扁虫仿生的水下机器人,其特征在于:所述头部包括电机舱(7)、尾部密封舱(8)以及密封舱盖板(9),电机舱(7)设置在尾部密封舱(8)的内部,且尾部密封舱(8)的末端安装有密封舱盖板(9);电机舱(7)的内部设置有电机,电机与软轴(19)连接;尾部密封舱(8)内部设置有锂电池、姿态测量组件、pid控制器、l298n电机驱动模块以及lm2598降压模块,所述pid控制器与所述姿态测量组件共同连接好固定在尾部密封舱8的上平面保持初始的水平状态。5.一种基于海扁虫仿生的水下机器人抗干扰控制方法,其特征在于,包括以下步骤:s1:实时获得水下机器人的姿态角;s2:对不同大小的扰流进行抗干扰训练,得到本仿生机器人的pid参数;s3:对姿态角进行误差分析,根据姿态角的误差值对水下机器人的电机以及舵机(4)的输出进行调节;s4:将姿态角输入神经网络进行训练,得到所期望的pid值,通过一定的pid算法得到要输出的pwm的信号值;
s5:根据pwm信号值对电机的正反转、推力进行调控以及舵机(4)转动的角度,对水下机器人的姿态进行调节。6.根据权利要求5所述的基于海扁虫仿生的水下机器人抗干扰控制方法,其特征在于:所述s2中的pid参数获取内容如下:第一步:在不同的扰流大小下获取所述水下仿生机器人的初始姿态角;第二步:将初始姿态角进行神经网络的训练,输出训练pid参数;第三步:将训练的pid参数与所述初始姿态角相对应,确定pid参数列表。7.根据权利要求5所述的一种基于海扁虫仿生的水下机器人抗干扰控制方法,其特征在于:所述s3中的姿态角进行误差分析包括以下步骤:第一步:对姿态角进行数据滤波处理;第二步:得到姿态角的误差值;第三步:误差值用于表征姿态角与初始姿态角之间的差值。8.根据权利要求5所述的基于海扁虫仿生的水下机器人抗干扰控制方法,其特征在于:所述s4中的通过pid算法计算得到pwm信号值包括以下步骤:第一步:将姿态角输入所述pid控制器;第二步:根据训练结果计算得到pid参数增量;第三步:将pid参数增量与所述初始pid参数相加得到目标pid参数,目标pid参数用于表征pid算法中下一次运算的初始pid参数;第四步:根据目标pid参数对所述欧拉角进行pid计算,通过pid算法计算得到pwm信号值。9.根据权利要求5所述的基于海扁虫仿生的水下机器人抗干扰控制方法,其特征在于:所述s5中的电机正反转对水下机器人的姿态调节:当左右两个电机同时正转,驱使水下机器人向前运动;当左右两个电机同时反转,驱使水下机器人向后运动。10.根据权利要求5所述的基于海扁虫仿生的水下机器人抗干扰控制方法,其特征在于:所述s5中的舵机(4)角度的调节,对水下机器人进行姿态的调节:当舵机(4)正转时仿生机器人向上弯曲,实现水下机器人整体上浮的功能;当舵机(4)反转时仿生机器人向上下曲,实现水下机器人整体上潜的功能。
技术总结
本发明涉及水下仿生机器人控制领域,公开了一种基于海扁虫仿生的水下机器人抗干扰控制方法,包括如下步骤:通过实时获得水下机器人的姿态角,对不同大小的扰流进行抗干扰训练,得到本仿生机器人的PID参数,对姿态角进行误差分析,根据姿态角的误差值对水下机器人的电机以及舵机的输出进行调节,将姿态角输入神经网络进行训练,得到所期望的PID值,通过一定的PID算法得到要输出的PWM的信号值,根据PWM信号值对电机的正反转、推力进行调控以及舵机转动的角度,对水下机器人的姿态进行调节。本发明可得到其初始的PID参数列表,并且通过神经网络进行训练能得到符合大部分复杂水体的PID参数。PID参数。PID参数。
技术研发人员:刘长红 李楷林 冯沼棠 黄杰华 伍雄谦 陈思霖 江帆
受保护的技术使用者:广州大学
技术研发日:2022.08.12
技术公布日:2022/12/5
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。