1.本技术属于物联网技术领域,具体涉及一种应激性实时图像采集的电缆附着物识别装置。
背景技术:
2.在国内加速建设进程中,城市的用电需求不断增长。并且,电缆被当做电力系统中连接电路和传输工具而普遍应用,因此,电缆故障成为电力故障当中十分关键的一个方面。
3.日常生活中,电缆表面存在附着物,会导致电缆断掉或者存在短接风险,是导致电缆故障的一个重要因素。现有技术中,技术人员通过人工观察方式判断电缆表面是否存在附着物。但是,这种方式需要耗费大量的人力资源,同时电缆附着物监测的效率低下,同时对附着物带来的电缆工作异常的响应也是滞后的。因此,如何高效的实现电缆附着物的监测成为本技术领域亟待解决的问题。
技术实现要素:
4.本技术实施例的目的是提供一种应激性实时图像采集的电缆附着物识别装置,能够解决现有技术中电缆附着物监测效率低下的问题,通过传感器采集到的数据对电缆在一定条件下是否存在附着物现象进行识别,从而可以有针对性的进行附着物观测安排,提高了电缆附着物监测效率,确保电缆的运行安全性。
5.第一方面,本技术实施例提供了一种应激性实时图像采集的电缆附着物识别装置,所述装置包括:
6.拉力传感器,用于获取电缆在电缆支架处的拉力数据;
7.处理单元,与所述拉力传感器连接,用于在所述拉力数据满足图像获取条件的情况下,向图像采集器发出图像采集指令;
8.所述图像采集器,与所述处理单元连接,用于接收所述图像采集指令,并获取实时电缆图像;
9.所述处理单元,还用于将所采集到的实时电缆图像进行图像识别,若所述实时电缆图像满足附着物识别条件,则确定电缆上存在有附着物;其中,所述附着物识别条件包括对实时电缆图像的电缆位置识别、电缆直径识别以及像素深度识别中的至少一种。
10.进一步的,所述处理单元,包括:
11.第一数据接收子单元,用于接收所述拉力数据;
12.数据分析子单元,用于对所述拉力数据进行滤波处理,得到电缆支架间的纵向拉力数据。
13.进一步的,所述处理单元,包括:
14.第二数据接收子单元,用于接收所述实时电缆图像;
15.图像识别子单元,用于对所述实时电缆图像中的电缆位置、电缆直径以及像素深度中的至少一种进行判断;
16.条件判断子单元,若所述实时电缆图像中的电缆位置达到目标位置,或者,电缆直径达到的目标直径,或者,所述实时电缆图像中的电缆的像素深度在预设深度范围,则确定所述电缆上存在有附着物。
17.进一步的,所述条件判断子单元,具体用于:
18.若所述实时电缆图像中的电缆的像素深度在第一深度范围,或者,实时电缆图像的平均像素深度在第二深度范围,则确定所述电缆上存在有附着物。
19.其中,所述附着物包括:雪、霜、冰、灰尘以及树叶中的至少一种。
20.进一步的,所述装置还包括:
21.告警单元,与所述处理单元连接,用于在确定所述电缆上存在有附着物的情况下,根据所述附着物的附着程度,以及预先设置的告警等级映射表,生成相应等级的告警信息;
22.通信单元,用于将所述告警信息发送至附着物告警响应设备。
23.其中,所述所述图像采集器设置于所述电缆支架处,且朝向电缆敷设方向。
24.第二方面,本技术实施例提供了一种应激性实时图像采集的电缆附着物识别方法,所述方法包括:
25.获取电缆在电缆支架处的拉力数据;
26.在所述拉力数据满足图像获取条件的情况下,发出图像采集指令,并基于所述图像采集指令获取实时电缆图像;
27.将所采集到的实时电缆图像进行图像识别,若所述实时电缆图像满足附着物识别条件,则确定电缆上存在有附着物;其中,所述附着物识别条件包括对实时电缆图像的电缆位置识别、电缆直径识别以及像素深度识别中的至少一种。
28.进一步的,所述获取电缆在电缆支架处的拉力数据,包括:
29.接收所述拉力数据;
30.对所述拉力数据进行滤波处理,得到电缆支架间的纵向拉力数据。
31.第三方面,本技术实施例提供了一种电子设备,该电子设备包括处理器、存储器及存储在所述存储器上并可在所述处理器上运行的程序或指令,所述程序或指令被所述处理器执行时实现如第二方面所述的应激性实时图像采集的电缆附着物识别方法的步骤。
32.在本技术实施例中,拉力传感器,用于获取电缆在电缆支架处的拉力数据;处理单元,用于在所述拉力数据满足图像获取条件的情况下,向图像采集器发出图像采集指令;所述图像采集器,用于接收所述图像采集指令,并获取实时电缆图像;所述处理单元,用于将所采集到的实时电缆图像进行图像识别,若所述实时电缆图像满足附着物识别条件,则确定电缆上存在有附着物。本技术方案,通过传感器采集到的数据对电缆在一定条件下是否存在附着物现象进行识别,从而可以有针对性的进行附着物观测安排,提高了电缆附着物监测效率,确保电缆的运行安全性。
附图说明
33.图1是本技术实施例一提供的应激性实时图像采集的电缆附着物识别装置的结构示意图;
34.图2是本技术实施例二提供的应激性实时图像采集的电缆附着物识别装置的结构示意图;
35.图3是本技术实施例三提供的应激性实时图像采集的电缆附着物识别方法的流程示意图;
36.图4是本技术实施例四提供的电子设备的结构示意图。
具体实施方式
37.为了使本技术的目的、技术方案和优点更加清楚,下面结合附图对本技术具体实施例作进一步的详细描述。可以理解的是,此处所描述的具体实施例仅仅用于解释本技术,而非对本技术的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本技术相关的部分而非全部内容。在更加详细地讨论示例性实施例之前应当提到的是,一些示例性实施例被描述成作为流程图描绘的处理或方法。虽然流程图将各项操作(或步骤)描述成顺序的处理,但是其中的许多操作可以被并行地、并发地或者同时实施。此外,各项操作的顺序可以被重新安排。当其操作完成时所述处理可以被终止,但是还可以具有未包括在附图中的附加步骤。所述处理可以对应于方法、函数、规程、子例程、子程序等等。
38.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员获得的所有其他实施例,都属于本技术保护的范围。
39.本技术的说明书和权利要求书中的术语“第一”、“第二”等是用于区别类似的对象,而不用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便本技术的实施例能够以除了在这里图示或描述的那些以外的顺序实施,且“第一”、“第二”等所区分的对象通常为一类,并不限定对象的个数,例如第一对象可以是一个,也可以是多个。此外,说明书以及权利要求中“和/或”表示所连接对象的至少其中之一,字符“/”,一般表示前后关联对象是一种“或”的关系。
40.下面结合附图,通过具体的实施例及其应用场景对本技术实施例提供的应激性实时图像采集的电缆附着物识别装置进行详细地说明。
41.实施例一
42.图1是本技术实施例一提供的应激性实时图像采集的电缆附着物识别装置的流程示意图。如图1所示,所述装置包括:
43.拉力传感器101,用于获取电缆在电缆支架处的拉力数据;
44.处理单元102,与所述拉力传感器连接,用于在所述拉力数据满足图像获取条件的情况下,向图像采集器发出图像采集指令;
45.所述图像采集器103,与所述处理单元连接,用于接收所述图像采集指令,并获取实时电缆图像;
46.所述处理单元102,还用于将所采集到的实时电缆图像进行图像识别,若所述实时电缆图像满足附着物识别条件,则确定电缆上存在有附着物;其中,所述附着物识别条件包括对实时电缆图像的电缆位置识别、电缆直径识别以及像素深度识别中的至少一种。
47.本实施例中,所述拉力可以理解为在弹性限度以内,物体受外力的作用而产生的形变与所受的外力成正比,形变随力作用的方向不同而异,使物体延伸的力称“拉力”。所述拉力数据可以理解为所述电缆架在电缆支架上时,电缆支架对电缆的拉力值数据。所述拉力数据可以是根据所述拉力传感器101检测获得的。
48.本实施例中,所述拉力传感器101的弹性元件在外力作用下产生弹性变形,使粘贴在他表面的电阻应变片也随同产生变形,电阻应的阻值随形变发生变化,再通过测量电路将这一电阻变化转换为可测量的电信号,从而获取所述拉力数据。
49.本实施例中,所述图像获取条件可以理解为用于判断是否进行图像获取操作的标准。示例性的,所述所述拉力数据满足图像获取条件可以是所述拉力数据满足预设阈值,也可以是所述拉力数据与常规拉力值的差值大于预设差值。
50.所述图像采集器可以理解为利用图像识别技术,批量的获取图像地址,将所述图像批量的自动化下载到本地的图像搜集工具。所述图像采集可以理解为图像采集是指图像经过采样、量化以后转换为数字图像并输入、存储到帧存储器。
51.所述图像采集指令可以理解为包含控制所述图像采集器进行图像采集操作的代码。
52.本实施例中,所述处理单元102读取所述拉力传感器101获取的拉力数据,并将所述拉力数据与预设阈值进行比较。若所述拉力数据大于或者等于预设阈值,则确定所述拉力数据满足图像获取条件,处理单元102向图像采集器103 发送包含进行图像采集操作的控制代码。本实施例中,若所述拉力数据小于预设阈值,则确定所述拉力数据不满足图像获取条件,处理单元102不会向图像采集器发出图像采集指令。
53.示例性的,所述处理单元102读取拉力传感器的拉力数据,若当前拉力值为50牛顿,预设阈值为40牛顿,当前拉力值大于预设阈值,则确定所述拉力数据满足图像获取条件,处理单元102向图像采集器103发送包含进行图像采集操作的控制代码。若当前拉力值为30牛顿,预设阈值为40牛顿,当前拉力值小于预设阈值,则确定所述拉力数据不满足图像获取条件,处理单元102不会向图像采集器103发送包含进行图像采集操作的控制代码。
54.本实施例中,可选的,所述处理单元102,包括:
55.第一数据接收子单元,用于接收所述拉力数据;
56.数据分析子单元,用于对所述拉力数据进行滤波处理,得到电缆支架间的纵向拉力数据。
57.其中,所述滤波处理可以理解为去掉拉力数据中的随机误差,以提高数据质量。可以理解的是,在所述拉力传感器101获取拉力数据的过程中,可能会存在由于风力等外界因素导致电缆发生晃动,使之产生横向的拉力数据从而使所获取的拉力数据与实际存在偏差的情况。通过所述滤波处理可以排除原始数据中的随机误差。
58.本实施例中,第一接收子单元接收所述拉力传感器101获取的拉力数据。数据分析子单元对所述拉力数据进行滤波处理。具体的,可以通过限幅滤波法、中位值滤波法或者递推平均滤波法等方法对所述拉力数据进行滤波处理得到电缆支架间的纵向拉力数据。本技术中不对所述滤波处理方法做具体限定。此处以通过限幅滤波法进行滤波处理为例进行描述,首先,根据经验判断,确定两次获取的拉力值允许的最大偏差阈值。对每次检测到新拉力值时进行判断:若本次新拉力值与上一次滤波效果之差小于或者等于最大偏差阈值,则本次拉力值有效,令本次滤波结果等于新拉力值。若本次获取的拉力值与上次滤波结果之差大于最大偏差阈值,则本次获取的拉力值无效,放弃本次获取的拉力值,本次滤波结果等于上次滤波结果。
59.本实施例所提供的技术方案,接收所述拉力数据;对所述拉力数据进行滤波处理,
得到电缆支架间的纵向拉力数据。通过滤波处理,去掉拉力数据中的随机误差,以提高数据的准确性。
60.本实施例中,可选的,所述附着物包括:雪、霜、冰、灰尘以及树叶中的至少一种。
61.其中,所述附着物包括:雪、霜、冰、灰尘以及树叶中的至少一种可以理解为所述附着物包括雪、霜、冰、灰尘以及树叶中的一种或者多种。可以理解的是不同的附着物可能导致电缆出现不同的电缆故障。例如,若附着物为灰尘或者树叶,会使电缆散热变慢,从而导致电缆出现高温故障。若附着物为雪、霜、冰等,可能会由于融化导致电缆出现水浸故障。
62.本实施例所提供的技术方案,所述附着物包括:雪、霜、冰、灰尘以及树叶中的至少一种。通过对不同类型的附着物进行监测,提供了一种合理、全面的监测机制,从而可以针对性的避免不同类型的电缆故障。
63.本实施例中,以所述图像采集器103为彩色相机为例进行描述。所述实时电缆图像可以理解为实时拍摄的电缆彩色图像。所述获取实时电缆图像的方式可以是基于彩色相机实时对所述电缆进行拍摄,从而获得电缆图像。
64.本实施例中,所述图像传感器103接收所述处理单元102发送的包含进行图像采集操作的控制代码,通过摄像头对所述电缆进行拍摄以获取电缆图像。
65.本实施例中,可选的,所述图像采集器103设置于所述电缆支架处,且朝向电缆敷设方向。
66.其中,所述朝向电缆敷设方向可以是所述图像采集器103朝向与电缆敷设平行的方向。
67.本实施例中,所述图像采集器103设置于所述电缆支架处,且朝向与电缆敷设方向平行的方向。示例性的,所述电缆为南北方向敷设,所述图像采集器 103设置于所述北方的电缆支架处,且朝向为南。
68.本实施例所提供的技术方案,所述图像采集器103设置于所述电缆支架处,且朝向电缆敷设方向,可以使所获取的电缆图像更加清晰,并且准确度更高。
69.本实施例中,所述图像识别可以理解为利用智能设备对图像进行处理、分析和理解,以识别各种不同模式的目标和对象的技术。所述附着物识别条件可以理解为用于判断是否存在附着物的标准。所述电缆位置识别可以理解为对电缆在电缆图像中的所处位置进行识别,具体可以是确定电缆在电缆图像中的坐标。所述电缆直径识别可以理解为对电缆图像中的电缆直径进行识别,具体可以是对电缆图像中的电缆的截面宽度进行识别。所述像素深度可以理解为存储每个像素所用的位数。像素深度决定彩色图像的每个像素可能有的颜色数,或者确定灰度图像的每个像素可能有的灰度级数。所述像素深度识别具体可以是确定电缆图像文件位大小和电缆图像的像素点总数,用文件的位大小除以像素点总数确定像素深度。所述附着物识别条件包括对实时电缆图像的电缆位置识别、电缆直径识别以及像素深度识别中的至少一种可以理解为所述附着物识别条件包括对实时电缆图像的电缆位置识别、电缆直径识别以及像素深度识别中的一种或者多种。
70.本实施例中,对所述处理单元102所采集到的实时电缆图像中的电缆进行识别,并判断所述电缆图像是否满足附着物识别条件,若满足,则确定电缆上存在有附着物。
71.进一步的,可选的,所述处理单元102,包括:
72.第二数据接收子单元,用于接收所述实时电缆图像;
73.图像识别子单元,用于对所述实时电缆图像中的电缆位置、电缆直径以及像素深度中的至少一种进行判断;
74.条件判断子单元,若所述实时电缆图像中的电缆位置达到目标位置,或者,电缆直径达到的目标直径,或者,所述实时电缆图像中的电缆的像素深度在预设深度范围,则确定所述电缆上存在有附着物。
75.本实施例中,所述实时电缆图像中的电缆位置达到目标位置可以理解为电缆在电缆图像中的坐标达到预设坐标。所述电缆直径达到的目标直径可以是电缆直径大于或者等于预设直径。所述实时电缆图像中的电缆的像素深度在预设深度范围可以是像素深度大于所述预设深度范围的最小值并且小于预设深度范围的最大值。可以理解的是,当附着物附着于电缆表面时,会导致电缆发生形变,从而导致电缆位置发生变化;附着物堵盖在电缆表面时,会导致电缆图像中的电缆截面直径变大;当附着物覆盖于电缆表面时,由于附着物与电缆的色差,导致电缆的像素深度发生变化。例如,当存在雪覆盖于黑色的电缆表面时,会导致像素深度值变小。
76.本实施例中,所述第二数据接收子单元接收所述实时电缆图像,以供图像识别子单元,用于对所述实时电缆图像中的电缆的坐标值、电缆直径以及像素深度中的一种或者多种维度进行判断。若满足实时电缆图像中的电缆位置达到目标位置可以理解为电缆在电缆图像中的坐标达到预设坐标、所述电缆直径达到的目标直径可以是电缆直径大于或者等于预设直径以及所述实时电缆图像中的电缆的像素深度在预设深度范围可以是像素深度大于所述预设深度范围的最小值并且小于预设深度范围的最大值中的一种或者多种情况,则所述条件判断子单元确定所述电缆上存在有附着物。
77.本实施例所提供的技术方案,对所述实时电缆图像中的电缆位置、电缆直径以及像素深度中的至少一种进行判断;若所述实时电缆图像中的电缆位置达到目标位置,或者,电缆直径达到的目标直径,或者,所述实时电缆图像中的电缆的像素深度在预设深度范围,则确定所述电缆上存在有附着物。从多个维度对电缆是否存在附着物进行判断,从而使所述判断结果更加准确。
78.本实施例中,可选的,所述条件判断子单元,具体用于:
79.若所述实时电缆图像中的电缆的像素深度在第一深度范围,或者,实时电缆图像的平均像素深度在第二深度范围,则确定所述电缆上存在有附着物。
80.其中,所述第一深度范围可以是技术人员预先设置的当电缆存在附着物时所述电缆对应的像素深度范围。所述第二深度范围可以是技术人员预先设置的当电缆存在附着物时所述电缆图像的平均像素深度对应的像素深度范围。可以理解的是,当附着物覆盖于电缆表面时,由于附着物与电缆的色差,导致电缆的像素深度发生变化。例如,当存在雪覆盖于黑色的电缆表面时,会导致像素深度变浅。当雪天或者雾天时,由于雪、雾的笼罩,会导致电缆图像的平均像素深度值变小,当雪天或者雾天时,默认会存在冰、雪等附着物覆盖于电缆表面。
81.本实施例所提供的技术方案,通过所述实时电缆图像中的电缆的像素深度是否在第一深度范围,或者,实时电缆图像的平均像素深度是否在第二深度范围,判断所述电缆上是否存在有附着物。通过上述判断方式,不仅通过电缆的情况对电缆是否存在附着物进行判断,还可以通过天气等外界因素对对电缆是否存在附着物进行判断,进一步提高了附着
物监测的准确性。
82.本实施例所提供的技术方案,获取电缆在电缆支架处的拉力数据;若所述拉力数据满足图像获取条件,则获取实时电缆图像,将所采集到的实时电缆图像进行图像识别,若所述实时电缆图像满足附着物识别条件,则确定电缆上存在有附着物。通过传感器采集到的数据对电缆在一定条件下是否存在附着物现象进行识别,从而可以有针对性的进行附着物观测安排,提高了电缆附着物监测效率,确保电缆的运行安全性。
83.实施例二
84.图2是本技术实施例二提供的应激性实时图像采集的电缆附着物识别装置的结构示意图。如图2所示,所述装置包括:
85.告警单元204,与所述处理单元连接,用于在确定所述电缆上存在有附着物的情况下,根据所述附着物的附着程度,以及预先设置的告警等级映射表,生成相应等级的告警信息;
86.通信单元205,用于将所述告警信息发送至附着物告警响应设备。
87.本实施例中,所述附着物的附着程度可以理解为电缆被附着物覆盖的程度,例如电缆被附着物覆盖的长度、附着物的厚度等。所述告警等级可以用来表示告警信息紧急程度,其具体可以包括一级告警等级、二级告警等级以及三级告警等级。可以理解的是,所述一级告警等级的级别高于二级告警等级高于三级高级等级。所述告警等级级别越高,对应的告警信息越紧急。告警等级映射表可以理解为用于规定所述附着物的附着程度与所述告警等级的对应关系的数据表,其可以预先存储于数据库中。所述告警信息可以是包含附着物的附着程度和告警等级等信息的提示信息。所述附着物告警响应设备可以理解为对电缆存在附着物做出响应的终端设备,其具体可以是电缆检修人员对应的终端设备。
88.所述根据所述附着物的附着程度,以及预先设置的告警等级映射表,生成相应等级的告警信息可以是附着物的附着程度越高,所述告警等级映射表中对应的告警等级越高。示例性的,所述告警等级映射表中规定若所述附着物覆盖长度小于或者等于20厘米或者附着物的覆盖厚度小于或者等于1厘米,则对应告警等级为三级告警等级;若所述所述附着物覆盖长度大于20厘米且小于50 厘米或者附着物的覆盖厚度大于1厘米且小于2厘米,则对应告警等级为二级告警等级;所述附着物覆盖长度大于或者等于50厘米或者附着物的覆盖厚度小于或者大于或者等于2厘米,则对应告警等级为一级告警等级。
89.本实施例中,在确定所述电缆上存在有附着物的情况下,所述告警单元204 根据所述附着物的覆盖长度和覆盖厚度,根据预先设置的告警等级映射表,确定所述附着物的附着程度对应的告警等级,并基于所述告警等级生成相应等级的告警信息。示例性的,所述附着物的覆盖长度为15厘米和覆盖厚度为0.5厘米,所述告警单元204根据预先设置的告警等级映射表,确定所述附着物的附着程度对应的告警等级为三级告警等级,并基于所述三级告警等级生成包含附着物的附着程度和告警等级的告警信息。所述通信单元205将所述告警信息发送至附着物告警响应设备。可以理解的是,不同等级的告警信息对应的提示方式也有所不同,例如三级告警等级对应的告警信息的提示方式可以是弹窗,二级告警等级的对应的告警信息的提示方式可以是短信,一级告警等级对应的告警信息的提示方式可以是报警提示音和灯光。
90.本实施例所提供的技术方案,根据所述附着物的附着程度,以及预先设置的告警
等级映射表,生成相应等级的告警信息,将所述告警信息发送至附着物告警响应设备。通过确定所述告警等级并将包含告警等级信息的告警信息发送至附着物告警响应设备可以使检修人员明确告警信息的紧急程度,以快速的针对不同的附着物附着情况做出对应的检修措施,进一步提高了附着物监测效率,保证了电缆运行的安全性。
91.实施例三
92.图3是本技术实施例三提供的应激性实时图像采集的电缆附着物识别方法的结构示意图。如图3所示,具体步骤如下:
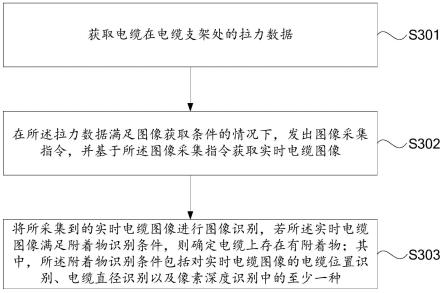
93.s301、获取电缆在电缆支架处的拉力数据。
94.s302、在所述拉力数据满足图像获取条件的情况下,发出图像采集指令,并基于所述图像采集指令获取实时电缆图像。
95.s303、将所采集到的实时电缆图像进行图像识别,若所述实时电缆图像满足附着物识别条件,则确定电缆上存在有附着物;其中,所述附着物识别条件包括对实时电缆图像的电缆位置识别、电缆直径识别以及像素深度识别中的至少一种。
96.本实施例所提供的技术方案,获取电缆在电缆支架处的拉力数据;若所述拉力数据满足图像获取条件,则获取实时电缆图像,将所采集到的实时电缆图像进行图像识别,若所述实时电缆图像满足附着物识别条件,则确定电缆上存在有附着物。通过传感器采集到的数据对电缆在一定条件下是否存在附着物现象进行识别,从而可以有针对性的进行附着物观测安排,提高了电缆附着物监测效率,确保电缆的运行安全性。
97.进一步的,所述获取电缆在电缆支架处的拉力数据,包括:
98.接收所述拉力数据;
99.对所述拉力数据进行滤波处理,得到电缆支架间的纵向拉力数据。
100.本实施例所提供的技术方案,接收所述拉力数据;对所述拉力数据进行滤波处理,得到电缆支架间的纵向拉力数据。通过滤波处理,去掉拉力数据中的随机误差,以提高数据的准确性。
101.实施例四
102.如图4所示,本技术实施例还提供一种电子设备400,包括处理器401,存储器402,存储在存储器402上并可在所述处理器401上运行的程序或指令,该程序或指令被处理器401执行时实现上述应激性实时图像采集的电缆附着物识别方法实施例的各个过程,且能达到相同的技术效果,为避免重复,这里不再赘述。
103.需要说明的是,本技术实施例中的电子设备包括上述所述的移动电子设备和非移动电子设备。
104.上述仅为本技术的较佳实施例及所运用的技术原理。本技术不限于这里所述的特定实施例,对本领域技术人员来说能够进行的各种明显变化、重新调整及替代均不会脱离本技术的保护范围。因此,虽然通过以上实施例对本技术进行了较为详细的说明,但是本技术不仅仅限于以上实施例,在不脱离本技术构思的情况下,还可以包括更多其他等效实施例,而本技术的范围由权利要求的范围决定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。