门开闭系统和具备门开闭系统的装载端口
1.本技术是申请日为2016年7月12日、申请号为201680045424.7(国际申请号为pct/jp2016/070567)、发明名称为“门开闭系统和具备门开闭系统的装载端口”的申请的分案申请。
技术领域
2.本发明涉及能够以不会使输送过程中的晶圆暴露于外部空气的方式使晶圆输送室内的气体进行循环的门开闭系统和具备门开闭系统的装载端口。
背景技术:
3.以往,通过对作为基板的晶圆实施各种处理工序来进行半导体的制造。近年来逐渐推进元件的高集成化、电路的微细化,为了防止微粒、水分附着于晶圆表面,要求将晶圆周边维持在较高的清洁度。并且,为了防止晶圆表面氧化等表面的性状产生变化的状况,也进行了使晶圆周边成为作为非活性气体的氮气氛或者成为真空状态的操作。
4.为了适当地维持这样的晶圆周边的气氛,将晶圆放入到被称作foup(front-opening unified pod)的密闭式的存储盒的内部进行管理,在该内部填充有氮。并且,为了在用于对晶圆进行处理的处理装置和foup之间进行晶圆的交接,利用efem(equipment front end module)。efem构成在壳体的内部大致封闭的晶圆输送室,并且在其相对的壁面中的一个壁面具有作为与foup之间的接口部发挥功能的装载端口(load port),并在另一个壁面连接有作为处理装置的一部分的加载互锁真空室。在晶圆输送室内设有用于输送晶圆的晶圆输送装置,利用该晶圆输送装置使晶圆在与装载端口相连接的foup和加载互锁真空室之间出入。通常,在晶圆输送室中始终流动着来自配置于输送室上部的风扇过滤单元的清洁的大气即下降流。
5.并且,近年来,在晶圆的最尖端工艺中,甚至连用作下降流的清洁的大气所含有的氧、水分等都有可能使晶圆的性状发生变化。因此,要求像专利文献1那样将使非活性气体在efem内循环的技术实用化。
6.现有技术文献
7.专利文献
8.专利文献1:日本特开2014―112631号公报
技术实现要素:
9.发明要解决的问题
10.但是,在专利文献1所记载的开闭系统中,大气、微粒仍然会残存于在密封构件、盖体及门部之间被封闭了的空间。其结果,在进一步要求低氧浓度、低湿度的efem中,存在以下这样的问题:这些残存的大气、微粒会混入到foup内、晶圆输送室,有可能导致晶圆的性状发生变化。
11.因此,本发明即是为了解决上述的问题而完成的,其目的在于提供在使foup和
efem连通时防止大气进入到foup和efem内的门开闭系统和具备门开闭系统的装载端口。
12.用于解决问题的方案
13.本发明的门开闭系统包括:
14.基体,其构成将输送空间与外部空间隔离的壁的一部分;
15.开口部,其设于所述基体;
16.门,其能够进行所述开口部的开闭以及盖体相对于收纳有收纳物的容器的固定和固定的解除;
17.第1密封构件,其用于将所述基体和所述容器之间密封;
18.第2密封构件,其用于将所述基体和所述门之间密封;
19.密闭空间,在处于所述容器隔着所述第1密封构件与所述开口部相抵接的状态时,该密闭空间至少由所述第1密封构件、所述第2密封构件、所述盖体以及所述门构成;
20.第1气体注入部,其用于向所述密闭空间注入气体;以及
21.第2气体排出部,其用于对所述密闭空间进行排气。
22.在该门开闭系统中,包括第1气体注入部和第1气体排出部,在处于容器隔着第1密封构件与开口部相抵接的状态时,即容器安装于开口部时,该第1气体注入部向容器和门之间的密闭空间注入气体,该第1气体排出部排出密闭空间的气体。由此,在容器安装于开口部的状态下,能够除去容器和门之间的大气并填充(净化)氮气。因而,能够防止存在于容器和门之间并含有可能使晶圆氧化等使晶圆的性状发生变化的氧、水分、微粒等的大气在将门开放时流入到输送空间和容器的内部。换言之,在将容器的盖体开放并将密闭空间开放之前,能够排除密闭空间的氧、水分、微粒。由此,在盖体开放时氧等不会漏出到容器内、输送空间,能够将容器内和输送空间维持在期望的环境条件。
23.本发明的门开闭系统反复进行利用所述第1气体注入部向所述容器和所述门之间注入气体的气体注入动作和利用所述第1气体排出部排出所述容器和所述门之间的气体的排出动作。
24.在该门开闭系统中,由于反复进行第1气体注入部的气体注入动作和第1气体排出部的气体排出动作,因此能够可靠地除去存在于容器和门之间的大气并填充气体。
25.本发明的门开闭系统具有压力调整部件,在将所述容器内的压力设为p1,将所述密闭空间的压力设为p2时,该压力调整部件用于调整压力p1和压力p2,
26.所述压力调整部件进行控制,使p1和p2接近。
27.在该门开闭系统中,若解除盖体相对于容器的固定,则有时容器的内部空间和密闭空间连通。此时,若p1与p2的压力差较大,则在容器和密闭空间之间进行移动的气体的流量变大,因此有可能导致堆积于容器底部的微粒飞扬,污染收纳物。因此,能够通过进行控制使p1和p2接近来减少在容器和密闭空间之间进行移动的气体的量,并通过抑制微粒的飞散来防止收纳物的污染。
28.本发明的门开闭系统具有输送室,该输送室包含形成所述输送空间的所述基体,
29.在将所述输送空间内的压力设为p3时,
30.所述压力调整部件还用于调整压力p3,其进行控制,使p1、p2及p3接近。
31.在该门开闭系统中,若门将开口部开放,则容器内的空间、密闭空间以及输送空间连通。此时,倘若各空间的压力差较大,则在各空间之间进行移动的气体的流量变大,因此
有可能导致存在于各空间的微粒飞扬。因此,能够通过进行控制使p1、p2及p3接近来减少在容器、密闭空间以及输送空间之间进行移动的气体的量,并通过抑制微粒的飞散来防止各空间的污染。
32.本发明的门开闭系统具有输送室,该输送室包含形成所述输送空间的所述基体,
33.该门开闭系统具有压力调整部件,在将所述容器内的压力设为p1,将所述密闭空间的压力设为p2,将所述输送空间内的压力设为p3时,该压力调整部件用于调整压力p1、压力p2及压力p3,
34.所述压力调整部件进行控制,使p1、p2、p3按顺序升高。
35.在该门开闭系统中,通过进行控制使压力p1、p2、p3按顺序升高,容器内的空间、密闭空间以及输送空间中的相邻的空间的压力差变小。由此,在门将开口部开放而各空间连通时,与相邻的空间的压力差变大的情况相比,能够减小在各空间之间进行移动的气体的流量。因而,能够减少在容器、密闭空间以及输送空间之间进行移动的气体的量,能够通过抑制微粒的飞散来防止各空间的污染。
36.本发明的门装载端口具备上述门开闭系统,
37.同时进行所述开口部的开放和所述盖体的拆卸,同时进行所述开口部的封闭和所述盖体的安装。
38.在该装载端口中,由于在将开口部开放时可靠地拆卸容器的盖体,并且在将开口部封闭时安装盖体,因此能够迅速地进行各操作。
39.发明的效果
40.在本发明中,包括第1气体注入部和的第1气体排出部,在处于容器隔着第1密封构件与开口部相抵接的状态时,即容器安装于开口部时,第1气体注入部向容器和门之间的密闭空间注入气体,第1气体排出部排出密闭空间的气体。由此,在容器安装于开口部的状态下,能够除去容器和门之间的大气并填充(净化)氮气。因而,能够防止存在于容器和门之间并含有可能使晶圆氧化等使晶圆的性状发生变化的氧、水分、微粒等的大气在将门开放时流入到输送空间和容器的内部。换言之,在将容器的盖体开放并将密闭空间开放之前,能够排除密闭空间的氧、水分、微粒。由此,在盖体开放时氧等不会漏出到容器内、输送空间,能够将容器内和输送空间维持在期望的环境条件。
41.在本发明中,由于反复进行第1气体注入部的气体注入动作和第1气体排出部的气体排出动作,因此能够可靠地除去存在于容器和门之间的大气并填充气体。
42.在本发明中,若解除盖体相对于容器的固定,则有时容器的内部空间和密闭空间连通。此时,若p1与p2的压力差较大,则在容器和密闭空间之间进行移动的气体的流量变大,因此有可能导致堆积于容器底部的微粒飞扬,污染收纳物。因此,能够通过进行控制使p1和p2接近来减少在容器和密闭空间之间进行移动的气体的量,并能够通过抑制微粒的飞散来防止收纳物的污染。
43.在本发明中,若门将开口部开放,则容器内的空间、密闭空间以及输送空间连通。此时,倘若各空间的压力差较大,则在各空间之间进行移动的气体的流量变大,因此有可能导致存在于各空间的微粒飞扬。因此,能够通过进行控制使p1、p2及p3接近来减少在容器、密闭空间以及输送空间之间进行移动的气体的量,并通过抑制微粒的飞散来防止各空间的污染。
44.在本发明中,若门将开口部开放,则容器内的空间、密闭空间以及输送空间连通。此时,倘若各空间的压力差较大,则在各空间之间进行移动的气体的流量变大,因此有可能导致存在于各空间的微粒飞扬。因此,能够通过进行控制使p1、p2及p3接近来减少在容器、密闭空间以及输送空间之间进行移动的气体的量,并能够通过抑制微粒的飞散来防止各空间的污染。
45.在本发明中,由于在将开口部开放时可靠地拆卸容器的盖体,并且在将开口部封闭时安装盖体,因此能够迅速地进行各操作。
附图说明
46.图1是示意地表示本发明的实施方式的efem与处理装置之间的关系的俯视图。
47.图2是表示拆卸了efem的侧面壁而得到的状态的侧视图。
48.图3是对efem的局部剖切地进行表示的立体图。
49.图4是表示efem的循环路径中的气体流动的示意图。
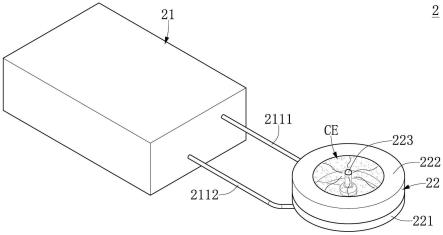
50.图5是图1所示的装载端口的立体图。
51.图6是图1所示的装载端口的主视图。
52.图7是图1所示的装载端口的后视图。
53.图8是图1所示的装载端口的侧剖视图。
54.图9是表示门部与第1密封构件之间的关系的局部放大剖视图。
55.图10是表示自图8的状态使foup向壳体侧移动了的状态的侧剖视图。
56.图11是表示被密封构件封闭了的密闭空间的局部放大剖视图。
57.图12是表示通过夹紧而使foup靠近门部的状态的局部放大剖视图。
58.图13是表示自图10的状态使门部与foup的盖体一同自开口部离开了的状态的侧剖视图。
59.图14是表示自图13的状态使门部与foup的盖体一同移动到下方的状态的侧剖视图。
60.图15是放大地表示构成efem的窗口单元和门部的主要部分放大立体图。
61.图16是放大地表示图15中的a-a截面的主要部分放大剖视图。
62.图17是表示设于窗口单元的夹具的主要部分放大主视图。
63.图18是表示控制部与各压力计的连接状态、控制部与各阀的连接状态的框图。
64.图19是表示使foup与efem连接并连通的步骤的流程图。
65.图20的(a)是表示夹紧单元的变形例的剖视图,图20的(b)是表示图20的(a)的夹紧状态的主视图。
66.图21的(a)是表示解除了图20的夹紧的状态的剖视图,图21的(b)是表示图21的(a)的支承片的放大剖视图。
67.图22的(a)是表示解除了夹紧的状态的放大俯视图,图22的(b)是表示动作中途的夹紧的放大俯视图,图22的(c)是表示夹紧了的状态的放大俯视图。
68.图23的(a)是表示具有向输送空间侧凹入的凹陷部的变形例的门部的剖视图,图23的(b)是表示具有向输送空间侧呈弓状凹入的弯曲面的变形例的门部的剖视图。
69.图24的(a)是表示具有向输送空间侧凹入的凹陷部的另一个变形例的门部的剖视
图,图24的(b)是表示具有向输送空间侧呈弓状凹入的弯曲面的另一个变形例的门部的剖视图。
70.图25是表示在压力p1高于p2的情况下的变形例的气体的流路的图。
71.图26是表示在压力p1低于p2的情况下的变形例的气体的流路的图。
72.图27是表示控制部与各压力计的变形例的连接状态、控制部与各阀的变形例的连接状态的框图。
73.图28是表示自图11的状态使门部朝向foup的盖体前进了的变形例的局部放大剖视图。
74.图29是表示使两个o形密封圈成为一体的变形例的剖视图。
具体实施方式
75.以下,根据附图说明本发明的实施方式。
76.图1是通过除去本发明的实施方式的efem1的顶板和与该efem1相连接的处理装置6的顶板等从而看到内部,并示意地表示该efem1与处理装置6之间的关系的俯视图。此外,图2是通过除去efem1的侧面的壁从而看到内部的侧视图。如该图1和图2所示,efem1由用于在预定的交接位置之间进行晶圆w的输送的晶圆输送装置2、以包围该晶圆输送装置2的方式设置的箱型的壳体3、与壳体3的前表面侧的壁(正面壁31)的外侧相连接的多个(图中是3个)装载端口4、以及控制部件5构成。
77.在此,在本技术中,将从壳体3观察时连接有装载端口4的那一侧的方向定义为前方,将与正面壁31相对的背面壁32侧的方向定义为后方,并且将与前后方向和垂直方向正交的方向定义为侧方。即,3个装载端口4在侧方排列配置。
78.此外,如图1所示,efem1能够连接与背面壁32的外侧相邻并构成处理装置6的一部分的加载互锁真空室61。通过将设于efem1和加载互锁真空室61之间的门1a开放,从而能够使efem1内和加载互锁真空室61成为连通的状态。处理装置6可以使用各种各样的设备,但通常成为这样的结构:与加载互锁真空室61相邻地设有输送室62,并且与输送室62相邻地设有用于对晶圆w进行处理的多个(图中是3个)处理单元63~63。在输送室62与加载互锁真空室61之间、在输送室62与处理单元63~63之间分别设有门62a、63a~63a,通过将这些门开放,从而能够使输送室62与加载互锁真空室61之间、输送室62与处理单元63~63之间连通。此外,能够使用设于输送室62内的输送机器人64使晶圆w在加载互锁真空室61和处理单元63~63之间进行移动。
79.如图2所示,晶圆输送装置2由臂部2a和基部2b构成,该臂部2a具有用于载置并输送晶圆w的抓取件(pick),该基部2b从下方支承该臂部2a,具有用于使臂部进行动作的驱动机构和升降机构。基部2b借助支承部21和导轨22支承于壳体3的正面壁31。而且,晶圆输送装置2能够沿着壳体3内的沿宽度方向延伸的导轨22进行移动。通过控制部件5控制晶圆输送装置2的动作,从而能够将载置于在侧方排列的各装载端口4的foup(容器)7所收纳的晶圆(收纳物)w向加载互锁真空室61输送;以及将在各处理单元63~63进行了处理之后的晶圆w向foup7内再次输送。
80.壳体3构成为包括:正面壁31、背面壁32、侧面壁33、34,其包围晶圆输送装置2的四周;顶壁35;底壁36;以及支承上述壳体壁31~35的支柱37a~37d。在设于正面壁31的开口
部92安装装载端口4。在设于背面壁32的矩形的开口32a连接加载互锁真空室61。壳体3具有输送空间9和后述的气体返回路径10,形成有包含这些输送空间9和气体返回路径10的大致封闭空间cs(参照图4)。另外,上述的各构件为了防止在构件之间产生可供内部的气体流出的间隙而精密地安装,但也可以构成为,在构件之间设置密封构件,从而进一步提高壳体3内的气密性。此外,设于背面壁32的开口32a能够被门1a(参照图3)封闭,该门1a具有驱动机构1b,并且能够上下驱动,通常被称作闸阀。另外,虽省略图示和说明,但在侧面壁33、34也设有开口,一个开口连接有晶圆w的位置调整所使用的对准器,另一个开口成为在通常情况下封闭的、维护用的开口。
81.装载端口4具有门部81,通过该门部81与设于foup7的盖体72相连结并一同进行移动,从而使foup7相对于大致封闭空间cs开放。在foup7内,在上下方向上设有许多个载置部,由此能够收纳许多个晶圆w。此外,也可以是,在foup7内填充通常的氮,并且利用控制部件5的控制来借助装载端口4对foup7内的气氛气体进行氮置换。
82.控制部件5构成为设于壳体3的比顶壁35靠上方的、位于该顶壁35与顶板38之间的上部空间us的控制单元。此外,控制部件5进行:晶圆输送装置2的驱动控制;利用装载端口4进行的foup7的氮置换控制;门1a、门部81的开闭控制;以及壳体3内的氮循环控制等。控制部件5由包括cpu、存储器以及接口的通常的微处理器等构成,在存储器中预先存储有处理所需要的程序,cpu依次取出并执行需要的程序,与周边硬件资源协作地实现预期的功能。另外,氮循环控制见后述。
83.如图4所示,大致封闭空间cs被分隔构件8分隔为气体返回路径10和作为供晶圆输送装置2驱动的空间的输送空间9。输送空间9和气体返回路径10仅在沿宽度方向延伸地设在输送空间9的上部的气体送出口11和沿宽度方向延伸地设在输送空间9的下部的气体吸引口12处相连通。而且,通过气体送出口11和气体吸引口12在输送空间9内产生下降气流,在气体返回路径10内产生上升气流,从而在大致封闭空间cs内形成图4中箭头所示的循环路径ci,气体进行循环。另外,在本实施方式中,使作为非活性气体的氮在该大致封闭空间cs中循环,但循环的气体并不限于此,也可以采用其他的气体。
84.接着,详细地说明气体返回路径10的结构。如图4所示,气体返回路径10是被底壁36、背面壁32、顶壁35以及分隔构件8封闭起来的空间。此外,气体返回路径10是为了使在输送空间9的下部从气体吸引口12吸引来的气体向输送空间9上部的气体送出口11返回而设置的。
85.在返回路径10的背面侧上部连接有用于向大致封闭空间cs内导入氮的气体供给部件(第3气体注入部)16。气体供给部件16能够基于来自控制部件5的命令控制氮的供给和供给的停止。因此,在氮的一部分流出到大致封闭空间cs的外部的情况下,能够通过气体供给部件16供给流出量的氮而将大致封闭空间cs中的氮气氛保持恒定。此外,在背面侧下部连接有用于排出大致封闭空间cs中的气体的气体排出部件(第3气体排出部)17。气体排出部件17基于来自控制部件5的命令进行动作,能够通过将未图示的闸门开放而使大致封闭空间cs的内部和设于外部的气体排出目的地连通。而且,通过与利用上述的气体供给部件16进行的氮的供给同时使用,从而能够将大致封闭空间cs置换为氮气氛。另外,在本实施方式中,在循环路径ci中循环的气体为氮,因此气体供给部件16供给氮,但在使其他的气体循环的情况下,气体供给部件16供给该循环的气体。
86.此外,在气体送出口11设有由过滤器13b和作为第1送风部件的风扇13a构成的风扇过滤单元13(ffu13)。风扇过滤单元13通过除去在大致封闭空间cs内循环的气体内所含有的微粒并且朝向下方向输送空间9内送风,从而在输送空间9内产生下降气流。另外,ffu13利用与分隔构件8相连结且沿水平方向延伸的支承构件18进行支承。
87.另一方面,在气体吸引口12连接有化学过滤器14,输送空间9内的气体经由化学过滤器14向气体返回路径10流入。如上所述,借助支承部21和导轨22将晶圆输送装置2(参照图2)支承于壳体3的正面壁31。因此,气体吸引口12不会与晶圆输送装置2相干涉,能够朝向上方较大程度地开口。此外,由于气体吸引口12如上述那样沿宽度方向延伸设置,因此,即使在晶圆输送装置2驱动时自同样沿宽度方向延伸设置的导轨22产生了微粒,也能够有效地吸引该微粒。而且,通过在气体吸引口12设置化学过滤器14,从而能够将在处理装置6(参照图1)的处理等过程中产生且流入到输送空间9内的分子状污染物质除去。并且,在气体返回路径10内的比化学过滤器14靠背面侧的位置,在宽度方向上设有作为第2送风部件的风扇15(参照图4)。通过该风扇15朝向气体返回路径10的下游侧即图4的上方进行送风,从而使气体吸引口12产生气体的吸引力,并且将通过了化学过滤器14的气体向上方送出,在气体返回路径10内产生上升气流。
88.而且,利用上述的ffu13的风扇13a和风扇15,使大致封闭空间cs内的气体通过在输送空间9内下降并在气体返回路径10内上升来进行循环。由于气体送出口11朝向下方开口,因此利用ffu13将气体朝向下方送出。由于气体吸引口12朝向上方开口,因此能够在利用ffu13产生的下降气流不产生紊乱的情况下保持原状态地朝向下方吸引气体,由此能够形成顺畅的气体流动。另外,通过在输送空间9内产生下降气流,从而将附着于晶圆w上部的微粒除去,并且防止微粒在输送空间9内浮游。
89.接着,使用图4说明在如上述那样构成的efem1内使氮循环的氮循环控制的动作。
90.首先,作为初始阶段,通过控制部件5使气体排出部件17排出气体,并且使气体供给部件16向大致封闭空间cs内供给氮,从而将处于大气气氛的efem1的大致封闭空间cs净化为氮气氛。在该阶段之后,在循环路径ci内的氮泄漏到外部的情况下,控制部件5使气体供给部件16与该泄漏量相应地进行氮的供给。
91.然后,在这样成为氮气氛的大致封闭空间cs中,通过控制部件5使ffu13的风扇13a和风扇15驱动,从而在循环路径ci内产生气体的循环。此时,由于ffu13的过滤器13b和化学过滤器14除去循环的气体中的微粒和分子状污染物质,因此输送空间9内成为始终产生清洁的氮的下降气流的状态。
92.在成为该状态的efem1中,使载置于装载端口4且被净化为氮气氛的foup7和输送空间9连通,使晶圆w出入。此时,输送空间9和foup7均是相同的氮气氛,输送空间9内的氮也维持清洁。因而,不必为了防止微粒、分子状污染物质进入到foup7内,而使foup7内相对于输送空间9内成为正压,能够抑制用于对foup7内进行净化的氮的消耗量。
93.图5表示装载端口4的立体图,图6表示从前方观察的情况下的主视图,图7表示从后方观察的情况下的后视图。以下,使用这些附图说明装载端口4的结构。另外,这些附图表示将位于载置台44的下方的外部罩42(参照图3)拆卸,使内部构造的局部露出来的状态。
94.装载端口4使基体41从安装有脚轮和设置脚的脚部45的后方垂直地立起,从该基体41的约60%左右的高度位置朝向前方设有水平基部43。并且,在该水平基部43的上部设
有用于载置foup7(参照图2)的载置台44。
95.如图8示意性地所示那样,foup7由主体71和盖体72构成,该主体71具有用于收纳晶圆w(参照图2)的内部空间sf,该盖体72用于开闭为了成为晶圆w的搬出搬入口而设于主体71的一面的开口71a。在foup7正确地载置于载置台44的情况下,盖体72与基体41相对。在盖体72的内部,为了收纳用于开闭盖体72的后述的连结部件82(参照图7)等,而形成有空间sc(参照图11)。
96.返回到图5~图7,在载置台44上,设有用于进行foup7的定位的定位销44a,并且设有用于相对于载置台44进行foup7的固定的锁定爪44b。锁定爪44b能够通过进行锁定动作而与定位销44a协作地将foup7引导到适当的位置并进行固定,能够通过进行解锁动作而使foup7成为可自载置台44离开的状态。另外,载置台44在载置有foup7的状态下能够利用载置台驱动部(未图示)在前后方向上进行移动。
97.此外,在载置台44,分别设有两处用于向foup7内供给气体的第2气体注入喷嘴(第2气体注入部)44c和两处用于从foup7内排出气体的第2气体排出喷嘴(第2气体排出部)44d。第2气体注入喷嘴44c和第2气体排出喷嘴44d通常位于载置台44的上表面的下方,在使用时,该第2气体注入喷嘴44c向上方前进而与foup7所具有的气体供给阀73(参照图8)相连结,该第2气体排出喷嘴44d向上方前进而与foup7所具有的气体排出阀74(参照图8)相连结。
98.在使用时,第2气体注入喷嘴44c的一端与foup7的内部相连通,在其另一端配设有第2气体注入阀44e。同样,第2气体排出喷嘴44d的一端与foup7的内部相连通,在其另一端配设有第2气体排出阀44f。而且,通过借助气体供给阀73从第2气体注入喷嘴44c向foup7的内部空间sf供给干燥氮气等气体,并借助气体排出阀74从第2气体排出喷嘴44d排出内部空间sf的气体,从而能够进行气体净化。此外,也可以通过使气体供给量多于气体排出量来进行使内部空间sf的压力高于外部、壳体3的内部空间se(参照图2)的压力的正压设定。通过提高foup7内(内部空间sf)的压力,从而如图11所示使盖体72的表面比抵接面71b朝向门部81鼓出。
99.构成装载端口4的基体41构成使输送空间9与外部空间隔离的正面壁31的一部分。如图5所示,基体41由在两侧方立起的支柱41a、41a、利用这些支柱41a、41a支承的基体主体41b、以及安装于在该基体主体41b呈大致矩形开放的窗部41c的窗口单元90构成。在此,本技术所说的大致矩形是指将具有四边的长方形作为基本形状并利用圆弧将四角平滑地连起来的形状。在基体主体41b的后表面的外周附近设有形成为矩形框状的作为弹性材料的垫片47(参照图7)。垫片47由气体的透过率较小的橡胶材料形成。
100.窗口单元90设于与上述的foup7的盖体72(参照图8)相对的位置。由于窗口单元90像之后详细说明的那样设有大致矩形的开口部92(参照图15),因此能够借助该开口部92将壳体3的内部空间se开放。而且,装载端口4具有用于开闭窗口单元90的开闭机构80,该窗口单元90构成为能够安装foup7。
101.如图6所示,开闭机构80包括:用于开闭开口部92的门部81;用于支承该门部81的支承框架83;借助滑动支承部件84将该支承框架83支承为能够在前后方向上移动的可动块85;以及将该可动块85支承为能够相对于基体主体41b在上下方向上移动的滑动轨道86。
102.支承框架83如图8所示那样支承门部81的后部下方,该支承框架83形成为在朝向
下方延伸之后通过设于基体主体41b的狭缝状的贯穿孔41d而朝向基体主体41b的前方突出的大致曲柄状的形状。而且,用于支承该支承框架83的滑动支承部件84、可动块85以及滑动轨道86设于基体主体41b的前方。即,用于使门部81进行移动的驱动部位处于壳体3的外侧,即使是万一在这些部分产生了微粒的情况下,由于贯穿孔41d为狭缝状而较小,因此也能够抑制微粒向壳体3内进入。
103.以下,详细说明开闭机构80的门部81。如图8所示,在门部81设有第1气体注入喷嘴(第1气体注入部)87和第1气体排出喷嘴(第1气体排出部)88,在foup7安装于窗口单元90时,该第1气体注入喷嘴(第1气体注入部)87向foup7和门部81之间注入气体,该第1气体排出喷嘴(第1气体排出部)88排出foup7和门部81之间的气体。第1气体注入喷嘴87的一端延伸到门部81的外表面,在其另一端部配设有第1气体注入阀87a。同样,第1气体排出喷嘴88的一端延伸到门部81的外表面,在其另一端部配设有第1气体排出阀88a。由此,在如后述那样利用夹紧操作使门部81和盖体72成为一体的状态下,第1气体注入喷嘴87与密闭空间sd(参照图11)相连通并供给干燥氮气等气体,第1气体排出喷嘴88与密闭空间sd相连通并排出气体,从而能够进行气体净化。另外,第1气体排出喷嘴88在中途分支并配设有均压阀89,也用作使密闭空间sd和输送空间9均压的均压用的喷嘴。
104.图9是表示门部81与o形密封圈(第1密封构件)94之间的关系的、图8的局部放大剖视图。如图9所示,门部81的foup7侧的端面81c处于比o形密封圈94的foup7侧端部朝向输送空间9侧靠近了期望的尺寸l2的位置。这样,门部81的foup7侧的端面81c全部位于比o形密封圈94的foup7侧端部靠输送空间9侧的位置。因而,能够可靠地防止盖体72与门部81的接触,并维持o形密封圈96对基体41和门部81之间的密封。另外,在图中用假想线l1表示o形密封圈94的foup7侧端部的位置。尺寸l2例如为0.1mm以上且3mm以下。
105.并且,在各方向的每个方向上都设有用于使门部81进行前后方向上的移动和上下方向上的移动的驱动器(未图示),通过对这些驱动器发送来自控制部cp的驱动指令,从而能够使门部81在前后方向和上下方向上进行移动。
106.此外,在基体主体41b的前方设有从水平基部43的正下方朝向下侧延伸的罩46(参照图8),在该罩46的内部覆盖支承框架83、滑动支承部件84、可动块85以及滑动轨道86,成为密闭状态。因此,虽然在基体主体41b形成有贯穿孔41d,但壳体3(参照图3)内的气体不会经由该部分向外侧流出。在罩46的内侧设有第1气体注入喷嘴87的下端、第1气体注入阀87a、第1气体排出喷嘴88及第1气体排出阀88a。
107.门部81包括用于吸附foup7的盖体72的吸附部79(参照图6)和用于进行开闭foup7的盖体72的锁紧操作、盖体72的保持的连结部件82(参照图7)。门部81进行盖体72的固定和固定的解除,能够自foup7拆卸盖体72和将该盖体72安装于foup7。利用连结部件82,通过进行盖体72的解锁动作,从而能够设为能够开放盖体72的状态,并且设为将盖体72连结于门部81并一体化的状态。此外,与此相反,也能够解除盖体72与门部81的连结,并且将盖体72安装于主体71并设为关闭状态。
108.在此,使用图15对前述的窗口单元90的详细结构进行说明。窗口单元90由窗框部91、安装于该窗框部91的作为弹性材料的o形密封圈94、96、以及用于使foup7隔着o形密封圈94密合于窗框部91的作为拉入部件的夹紧单元50构成。
109.窗框部91呈在内侧形成有大致矩形的开口部92的框形状。由于窗框部91作为窗口
单元90的构成要素而构成上述的基体41(参照图5)的一部分,因此开口部92能够将作为壳体3的壁面的正面壁31开放。在窗框部91的前表面以环绕开口部92的周缘附近的方式配设有o形密封圈94。在窗框部91的后表面以环绕开口部92的周缘附近的方式配设有o形密封圈96。
110.开口部92稍稍大于foup7的盖体72(参照图8)的外周,盖体72能够通过该开口部92进行移动。此外,在将foup7载置于载置台44的状态下,主体71的形成盖体72的周围的前表面作为抵接面71b,隔着o形密封圈94抵接于窗框部91的前表面。由此,在将foup7安装于窗口单元90时,o形密封圈94将开口部92(基体41)的周缘和foup7之间密封(参照图16)。
111.此外,上述的门部81隔着o形密封圈(第2密封构件)96抵接于窗框部91的后表面。由此,o形密封圈96将开口部92的周缘和门部81之间密封。具体地讲,进行抵接的是呈凸缘状设于门部81的外周的薄壁部81a。此时,形成于薄壁部81a的内侧的厚壁部81b通过形成为比开口部92小而经由开口部92朝向前方突出。
112.返回到图15,夹紧单元50在窗框部91的两侧部设于在上下方向上分开配置的位置,合计在4个部位设有夹紧单元50。各夹紧单元50大体由卡合片51和用于使该卡合片51进行动作的缸体52构成,在将foup7安装于窗口单元90的状态下,将foup7向基体41侧推压。
113.构成夹紧单元50的缸体52具有轴53,该轴53安装在窗框部91的后方,能够经由设于窗框部91的孔部朝向前方进退。在轴53的顶端安装有卡合片51的基端51a,顶端51b从该基端51a朝向轴53的外周方向延伸。此外,在轴53的外周形成有沿着轴向相位扭转90
°
的引导槽53a,固定于窗框部91侧的导销54从半径方向插入到该引导槽53a的内部。因此,随着缸体52的进退动作,利用导销54来引导引导槽53a,轴53绕轴中心转动90
°
。
114.而且,如图17所示,在卡合片51与轴53一同向前方突出的情况下,顶端51b朝向上方向,在卡合片51成为与轴53一同被向后方拉入的状态的情况下,顶端51b成为朝向内侧的foup7的方向。利用夹紧操作,卡合片51能够通过使顶端51b朝向内侧而与自foup7突出向侧方突出来的凸缘部71c相卡合。在保持这样卡合的状态的同时轴53被缸体52进一步拉入。由此,能够设为使foup7的抵接面71b更强有力地密合于o形密封圈94的夹紧状态。通过该夹紧单元50在4个部位进行作用,从而能够使o形密封圈94的变形量均匀而进一步提高密封性。即使在夹紧状态下,门部81的foup7侧的端面81c也位于比被foup7的抵接面71b向基体41侧推压的o形密封圈94的foup7侧端部靠输送空间9侧的位置。
115.此外,在使卡合片51移动到前方的情况下,顶端51b朝向上侧,从而成为从正面观察时不与凸缘部71c相干涉的位置。通过这样做,能够使foup7与载置台44一同进行移动。另外,在使顶端51b移动到前方的情况下,只是单纯地能够不与凸缘部71c相干涉即可,顶端51b并不限于朝向上方向,也可以设定为朝向下方向、外侧方向。
116.如上述那样构成的装载端口4通过由图5所示的控制部cp对各部发送驱动指令来进行动作。此外,如图18所示,控制部ct的输入侧连接有用于测量密闭空间sd的压力的压力计、用于测量foup7的内部空间sf的压力的压力计、用于测量壳体3的内部空间se的压力的压力计。同样,控制部ct的输入侧连接有用于测量密闭空间sd的湿度的湿度计、用于测量foup7的内部空间sf的湿度的湿度计、用于测量壳体3的内部空间se的湿度的湿度计。为了测量氧浓度,控制部ct的输入侧连接有用于测量密闭空间sd的氧浓度的氧(浓度)计、用于测量foup7的内部空间sf的氧浓度的氧(浓度)计、用于测量壳体3的内部空间se的氧浓度的
氧(浓度)计。就流量而言,控制部ct的输入侧连接有用于测量第1气体注入喷嘴87的流量的流量计、用于测量第2气体注入喷嘴44c的流量的流量计、用于测量第3气体注入部16的流量的流量计。
117.控制部ct的输出侧借助流量控制部cf与第1气体注入阀87a、第1气体排出阀88a、第2气体注入阀44e、第2气体排出阀44f、第3气体注入阀、第3气体排出阀、气体供给部件16、气体排出部件17以及均压阀89相连接,并借助驱动控制部cd与夹紧单元50、连结部件82以及吸附部79相连接。控制部ct设置于efem1,内置有各种存储器、用于接收用户的操作输入的控制器。流量控制部cf、驱动控制部cd设于efem1的控制器内。
118.以下,使用图8~图12来说明使用本实施方式的装载端口4的情况下的动作例。另外,在初始状态下各阀关闭。
119.图8表示使foup7载置在载置台44上并自基体41离开的状态。在该状态下,由于门部81隔着o形密封圈96抵接于构成窗口单元90的窗框部91(参照图15)的后表面,因此在窗框部91和门部81之间不会产生间隙,能够获得较高的密封性。因此,即便是由氮气等充满壳体3的内部空间se的状态,也能够抑制气体向外部流出、气体从外部向内部空间se流入。
120.如图19所示,在步骤s1中,foup7在锁定爪44b(参照图5)的锁定动作和定位销44a的定位作用的作用下相对于载置台44被固定于适当的位置。
121.然后,载置台44所具有的第2气体注入喷嘴44c和第2气体排出喷嘴44d向上方突出,并分别连接于foup7所具有的气体供给阀73和气体排出阀74。之后,在步骤s2中,通过打开第2气体注入阀44e,从而从第2气体注入喷嘴44c通过气体供给阀73供给新鲜的干燥氮气。同时,通过打开第2气体排出阀44f,从而将直到此刻一直积存于内部空间sf的气体通过气体排出阀74从第2气体排出喷嘴44d排出。通过这样进行气体净化,从而利用氮气充满内部空间sf,并且成为压力比壳体3的内部空间se的压力高的状态。另外,继续向foup7内填充氮气直到该流程结束为止。
122.接着,在步骤s3中,如图10所示,使载置台44朝向后方移动,使foup7的抵接面71b抵接于窗框部91。此时,门部81的端面81c位于比o形密封圈94的foup7侧端部朝向输送空间9侧靠近了预定的尺寸l2的位置。因而,即使foup7的盖体72向门部81侧鼓出,当使foup7靠近窗口单元90时,foup7的抵接面71b也是与o形密封圈94相抵接,而盖体72不会接触门部81的端面81c(参照图11)。因而,可靠地确保了o形密封圈96和门部81之间的密封。由于这样地使抵接面71b隔着o形密封圈94与窗框部91相抵接,使门部81隔着o形密封圈96与窗框部91相抵接,因此形成密闭空间sd。对形成密闭空间sd的基体41、o形密封圈94、96、盖体72以及门部81追加开口部92、第1气体注入喷嘴87以及第1气体排出喷嘴88而构成门开闭系统。
123.在使载置台44移动的情况下,预先利用构成夹紧单元50的缸体52使卡合片51(参照图15)朝向前方突出,顶端51b成为朝向上方向的状态而不与foup7相干涉。
124.之后,在步骤s4中,夹紧foup7而使其固定于窗口单元90。由此,通过自门部81和盖体72被隔离开的状态使foup7朝向门部81靠近,从而o形密封圈94被按压而弹性变形,能够提高foup7和基体41之间的密封性(参照图12)。并且,优选的是,预先将利用夹紧单元50使foup7朝向门部81靠近之后的门部81与盖体72之间的距离设定为能够进行上述的锁紧操作、解锁动作的距离。
125.具体地讲,利用构成夹紧单元50的缸体52将卡合片51朝向后方拉入,使顶端51b成
为朝向内侧的状态而卡合于foup7的凸缘部71c。通过进一步拉入顶端51b,从而使foup7的抵接面71b更密合于o形密封圈94,设为提高了密封性的状态。将这一连串的动作称作夹紧操作。此时,如图11所示,在盖体72和门部81之间形成有空间sg,其经由用于安装连结部件82的安装孔75与盖体的内部空间sc相连通。该空间sg和空间sc形成在foup7和门部81之间被密封起来的密闭空间sd。
126.在步骤s5中,通过使设于门部81的连结部件82(参照图7)进行动作,从而使盖体72成为解锁状态而能够自主体71拆卸,并且设为门部81借助吸附部79一体地保持盖体72的状态。
127.在步骤s6中,通过打开第1气体注入阀87a,从而从第1气体注入喷嘴87向密闭空间sd供给氮气。同时,通过打开第1气体排出阀88a,从而将到此刻为止一直积存于密闭空间sd的气体(大气)从第1气体排出喷嘴88排出。然后,在经过预定时间之后,通过关闭第1气体注入阀87a和第1气体排出阀88a,从而结束向密闭空间sd填充气体。另外,也可以是,反复进行利用第1气体注入喷嘴87向密闭空间sd注入气体的气体注入动作和利用第1气体排出喷嘴88自密闭空间sd排出气体的排出动作。在此,大气包含有可能使晶圆w氧化等使晶圆w的性状发生变化的氧、水分、微粒等。此外,排出积存于密闭空间sd的气体(大气)意味着,不仅排出存在于foup7和门部81之间的大气,也能够排出存在于盖体72的内部的大气,并填充气体。
128.在步骤s7中,使foup7的内部空间sf和密闭空间sd成为均压。具体地讲,在将夹紧操作后的内部空间sf的压力设为p1、将密闭空间sd的压力设为p2时,进行控制使p1和p2接近。
129.通过根据由密闭空间sd和foup7的压力计检测到的压力来调整第1气体注入喷嘴87和第1气体排出喷嘴88的流量,由此进行该压力调整。但是,也可以不使用压力计地进行压力调整。具体地讲,也可以是,根据第1气体注入喷嘴87和第1气体排出喷嘴88的流量以及第2气体注入喷嘴44c和第2气体排出喷嘴44d的流量来推断压力,并基于该推断压力来进行压力调整。在该情况下,由于不使用压力计也能够进行压力调整,因此能够削减成本。在推断压力时,也可以还考虑氧浓度计的极限氧浓度或者湿度计的极限湿度来进行推断。
130.能够利用各种方法进行压力的调整。如果预先决定了所使用的foup,则决定了所使用的foup7的内部空间sf、foup7的盖体体积,因此能够大体推断密闭空间sd的体积。因此,通过向密闭空间sd填充预定时间、预定流量的气体,从而也能够将密闭空间sd的压力p2调整为预定的压力。在该情况下,也可以不使用压力计、氧浓度计、湿度计地进行压力调整。
131.在此,说明了压力p2的调整方法,但这些调整方法也可以用于调整压力p1和p3。此外,不仅可以利用流量的调整来进行压力调整,也可以利用均压阀的调整以及流量和均压阀的组合来进行压力调整。将这些压力调整所使用的机构统称为压力调整部件。
132.在步骤s8中,如图13所示,使门部81和盖体72与支承框架83一同朝向后方移动。通过这样做,使foup7的盖体72自主体71离开而将内部空间sf开放,并且使门部81自开口部92离开而将壳体3(内部空间se)开放。此时,由于foup7的抵接面71b隔着o形密封圈94密合于窗口单元90,因此能够抑制在壳体3和foup7这两者与外部之间的气体的流出、流入。
133.此外,由于foup7的压力升高,因此从foup7的内部空间sf朝向壳体3内产生气体的流动。因此,能够抑制微粒等从壳体3向foup7内进入,从而将foup7内保持清洁。另外,借助
第2气体注入喷嘴44c继续供给低流量的气体也适合用于防止微粒的进入。之后,使压力调整结束。
134.接着,在步骤s9中,如图14所示,使门部81和盖体72与支承框架83一同向下方移动。通过这样做,能够将作为foup7的搬出搬入口的开口71a的后方较大程度地开放,能够在foup7和efem1之间进行晶圆w的移动。由于用于这样地使门部81移动的机构全部被罩46覆盖,因此能够抑制壳体3内的气体向外部漏出。
135.像以上那样,说明了将foup7的开口71a开放时的动作,而在将foup7的开口71a封闭时,进行与上述相反的动作即可。但是,在门开闭系统的运用上,在将foup7的开口71a封闭时,在内部空间sf内的压力、氧浓度、湿度浓度等是没有问题的水平的情况下,能够省略s6、s7的步骤。
136.通过反复进行这样的动作,从而o形密封圈94、96在其与盖体72或门部81之间反复弹性接触,有时也会产生新的微粒。这样的微粒会在将盖体72或门部81开放时利用在壳体3的内部形成的下降流向下方移动。因此,不会附着于晶圆w表面,能够将晶圆w表面维持在清洁的状态。
137.[本实施方式的装载端口的特征]
[0138]
本实施方式的装载端口4具有以下的特征。
[0139]
在本实施方式的装载端口4中,即使假设foup7的盖体72向基体41侧膨胀,由于在将foup7安装于开口部92时门部81的foup7侧的端面位于比第1密封构件94的foup7侧的端部靠输送空间9侧的位置,因此盖体72和门部81也不接触。由此,能够防止盖体72接触门部81而导致碎片飞散,能够将装载端口4的周边空间保持清洁。此外,能够减少:预先附着于门部81的灰尘因接触的冲击而飞扬;或者因接触的冲击而使foup7摆动,foup7底部的灰尘飞散;或者收纳物错位。
[0140]
在本实施方式的装载端口4中,门部81的foup7侧的端面的至少一部分位于比被夹紧并向基体41侧推压的第1密封构件94的foup7侧的端部靠输送空间9侧的位置。因而,在将foup7安装于开口部的状态下,能够可靠地防止盖体72与门部81的接触。
[0141]
在本实施方式的装载端口4中,即使假设foup7的盖体72向基体41侧膨胀,也能够可靠地防止盖体72与门部81的接触。
[0142]
[本实施方式的门开闭系统的特征]
[0143]
本实施方式的门开闭系统具有以下的特征。
[0144]
在本实施方式的门开闭系统或装载端口4中,包括第1气体注入喷嘴87和第1气体排出喷嘴88,在处于foup7隔着第1密封构件94与开口部92相抵接的状态时,即foup7安装于开口部92时,该第1气体注入喷嘴87向foup7和门部81之间的密闭空间sd注入气体,该第1气体排出喷嘴88排出密闭空间sd的气体。由此,在将foup7安装于开口部92的状态下,能够除去foup7和门部81之间的大气并填充(净化)氮气。因而,能够防止存在于foup7和门部81之间并含有可能使晶圆w氧化等使晶圆的性状发生变化的氧、水分、微粒等的大气在将门部81开放时流入到输送空间9和foup7的内部。换言之,在将foup7的盖体72开放而使密闭空间sd开放之前,能够排除密闭空间sd的氧、水分、微粒。由此,在盖体72开放时氧等不会漏出到foup7内、输送空间9,能够维持foup7内和输送空间sd的清洁度。
[0145]
在本实施方式的门开闭系统中,由于反复进行第1气体注入喷嘴87的气体注入动
作和第1气体排出喷嘴88的气体排出动作,因此能够可靠地除去存在于foup7和门部81之间的大气并填充气体。
[0146]
在本实施方式的门开闭系统中,在将foup7夹紧于基体41时,自门部81和盖体72被隔离开的状态使foup7朝向门部81靠近。由此,借助o形密封圈94的foup7与基体41之间的密封性上升。
[0147]
在本实施方式的门开闭系统中,若解除盖体72相对于foup7的固定,则有时foup7的内部空间sf和密闭空间sd连通。此时,若p1与p2之间的压力差较大,则在foup7和密闭空间sd之间移动的气体的流量变大,因此有可能导致堆积于foup7底部的微粒飞扬,污染晶圆w。因此,能够通过进行控制使p1和p2接近来减少在foup7和密闭空间sd之间移动的气体的量,并能够通过抑制微粒的飞散来防止晶圆w的污染。
[0148]
在具备本实施方式的门开闭系统的装载端口4中,由于在将开口部92开放时可靠地拆卸foup7的盖体72,并且在将开口部92封闭时安装盖体72,因此能够迅速地进行各操作。
[0149]
以上,根据附图说明了本发明的实施方式,但应认为具体的结构并不限定于这些实施方式。本发明的范围不仅利用上述的实施方式的说明来表示,也利用权利要求书来表示,还包含与权利要求书等同的意义和范围内的所有变更。
[0150]
在所述实施方式中,在图19的步骤s6中,通过第1气体注入喷嘴87向密闭空间sd供给氮气,第1气体排出喷嘴88从密闭空间sd排出气体,来进行气体净化。但是并不限定于此,第1气体排出喷嘴88也可以进行负压排气。具体地讲,在利用第1气体排出喷嘴88对存在于密闭空间sd的大气进行吸引而设为负压之后,第1气体注入喷嘴87供给氮气。由此,能够有效率地向密闭空间sd填充气体。
[0151]
在所述实施方式中,将控制部ct、流量控制部cf、驱动控制部cd设置于efem1。但是并不限定于此,也可以将控制部ct、流量控制部cf、驱动控制部cd中的一部分控制部或者全部控制部设置于装载端口4。此时,在装载端口4设有用于接收efem1的控制等来自主计算机的信号的接收部。在各控制部设置于装载端口4的情况下,如图27所示,控制部ct的输入侧连接有密闭空间sd和foup7的内部空间sf的压力计、湿度计、氧计,并且连接有第1气体注入喷嘴和第2气体注入喷嘴的流量计。
[0152]
在所述实施方式中,在图19的步骤7中,使内部空间sf的压力p1和密闭空间sd的压力p2接近。但是并不限定于此,也可以将输送空间9内的压力设为p3,进行控制使p1、p2及p3接近。具体地讲,也可以与p1、p2、p3中的任一者相配合地调整剩余的两个压力。在该情况下,若将p2、p3的压力调整为接近在密闭空间sd、foup内部空间sf、壳体内部空间se中体积最大的壳体内部空间se的压力p1,则能够缩短压力调整时间。此外,也可以进行控制使p1、p2、p3接近预定的压力值。若门部81将开口部92开放,则foup7内的空间sf、密闭空间sd以及输送空间9相连通。此时,倘若各空间的压力差较大,则在各空间之间移动的气体的流量变大,因此有可能导致存在于各空间的微粒飞扬。因此,能够通过进行控制使p1、p2及p3接近,来减少在foup7、密闭空间sd以及输送空间9之间移动的气体的量,并能够通过抑制微粒的飞散来防止各空间的污染。
[0153]
此外,在步骤s7中,也可以不使p1和p2接近,而是进行控制使p1、p2、p3按顺序升高。通过进行控制使压力p1、p2、p3按顺序升高,使foup7内的空间sf、密闭空间sd以及输送
空间9中的相邻的空间的压力差变小。由此,在门部81将开口部92开放而各空间连通时,与相邻的空间的压力差变大的情况相比,能够减小在各空间之间移动的气体的流量。因而,能够减少在foup7、密闭空间sd以及输送空间9之间移动的气体的量,并能够通过抑制微粒的飞散来防止各空间的污染。
[0154]
在所述实施方式中,容器采用了晶圆输送所使用的foup7。但是,晶圆收纳容器并不限定于此,也可以采用mac(multiapplication carrier)、h-mac(horizontal-mac)、fosb(front open shipping box)等。此外,容器并不限定于晶圆收纳容器,也可以应用于用于收纳以填充有非活性气体的状态进行输送的电子零件这样的收纳物的密闭容器。
[0155]
在所述实施方式中,装载端口安装于efem。但是,也可以应用于以下那样的分拣机和装置,该分拣机具有用于对载置于装载端口的容器内的收纳物进行重新排列、将载置于该装载端口的容器内的收纳物与载置于其他的装载端口的容器的收纳物进行交换的输送室,该装置将工艺装置自身作为输送室并在工艺装置自身安装装载端口。
[0156]
在所述实施方式中,采用了具有缸体52的夹紧单元50,但并不限定于此。如图20的(a)所示,设置于窗框部91的夹紧单元100具有支承片101、以能够旋转的方式支承于支承片101的棒状的旋转体103、以及用于驱动旋转体103的马达106。支承片101从窗框部91朝向前方延伸,利用该支承片101的中空部102将旋转体103支承为能够转动(参照图21的(b))。旋转体103具有自其上端部和轴向的中央部突出的按压片107(参照图20的(b))。在按压片107的顶端形成有按压突起108(参照图22),借助该按压突起108夹紧foup7的凸缘部71c。埋设于水平基部43的马达106与旋转体103的下端部相连结,使旋转体103绕轴线进行旋转。
[0157]
如图21的(a)所示,在解除了夹紧的状态下,按压片107与窗框部91垂直地朝向水平方向前方延伸(同时参照图22的(a))。通过自该状态,马达106驱动旋转体103使其旋转,从而如图22的(b)所示,按压片107绕旋转体103的轴线进行旋转。通过进一步使旋转体103旋转,从而按压片107借助按压突起108按压凸缘部71c来夹紧foup7(同时参照图20的(b))。另外,作为使旋转体103旋转的驱动部,也可以使用气体驱动式的凸轮等替代马达106。
[0158]
通过采用上述结构的夹紧单元100,从而能够减薄夹紧单元100的前后方向的厚度,并且能够将夹紧单元100配置在外部空间侧,因此能够防止与在输送空间9内运行的晶圆输送装置2之间的干涉。
[0159]
在所述实施方式中,门部81的foup7侧的端面81c整体位于比o形密封圈94的foup7侧端部靠输送空间9侧的位置。但是,门部81的foup7侧的端面81c的至少一部分位于比o形密封圈94的foup7侧端部靠输送空间9侧的位置即可。
[0160]
如图23的(a)所示,在门部81的foup7侧(前方侧)的端面110形成有向输送空间9侧凹入的凹陷部111。该凹陷部111的底面112位于比表示o形密封圈94的foup7侧端部的位置的假想线l1靠输送空间9侧的位置。换言之,门部81的foup7侧的端面110的至少一部分(底面112)位于比第1密封构件94的foup7侧的端部靠输送空间9侧的位置。由此,能够获得与所述实施方式相同的效果。端面110的至少一部分主要是指门部81的中央部附近、中央部周边区域。此外,端面110的概念不包含用于进行盖体72相对于foup7的固定和固定的解除的锁紧机构、用于固定盖体72和门部81的吸附部79、用于将盖体72定位于门部81的定位销(未图示)。另一方面,形成于端面110的外周的外周面113由于foup7和盖体72的种类、制造时的精度误差而位于比假想线l1靠foup7侧的位置。另外,由于foup7的抵接面71b位于比盖体72靠
输送空间9侧的位置,因此抵接面71b能够与o形密封圈94相抵接而形成密闭空间sd。
[0161]
如图23的(b)所示,在门部81的foup7侧(前方侧)的端面116形成有向输送空间9侧凹入的弯曲面117。该弯曲面117位于比表示o形密封圈94的foup7侧端部的位置的假想线l1靠输送空间9侧的位置。换言之,门部81的foup7侧的端面116的大部分位于比第1密封构件94的foup7侧的端部靠输送空间9侧的位置。由此,能够获得与所述实施方式相同的效果。另一方面,形成于端面116的外周的外周面113由于制造时的精度误差而位于比假想线l1靠foup7侧的位置。另外,foup7的一部分(盖体72)朝向输送空间9侧弯曲。此外,由于foup7的抵接面71b位于比盖体72的外周部靠输送空间9侧的位置,因此抵接面71b能够与o形密封圈94相抵接而形成密闭空间sd。通过这样地使弯曲面117的形状与因提高foup7内的压力而膨胀的膨胀面118相对应,从而即使假设foup7以各种形状进行膨胀,也能够可靠地防止foup7与门部81的接触。
[0162]
作为图23的(a)的变形例,也可以采用如图24的(a)所示那样,在门部81的端面110形成有凹陷部111,而外周面113位于比假想线l2靠输送空间9侧的位置的结构。即,在本变形例中,门部81的端面110全部位于比第1密封构件94的foup7侧的端部靠输送空间9侧的位置。由此,即使盖体72向输送空间9侧突出来,也能够防止盖体72与门部81之间的干涉,而且能够使抵接面71b与密封构件94相抵接。
[0163]
作为图23的(b)的变形例,也可以采用如图24的(b)所示那样,在门部81形成有弯曲面117,而外周面113位于比假想线l2靠输送空间9侧的位置的结构。即,在本变形例中,门部81的端面110全部位于比第1密封构件94的foup7侧的端部靠输送空间9侧的位置。由此,即使具有膨胀面118的盖体72向输送空间9侧突出来,也能够防止盖体72与门部81之间的干涉,而且能够使抵接面71b与密封构件94相抵接。
[0164]
在利用门部81自foup7拆卸了膨胀的盖体72之后,有时盖体72的膨胀会恢复到原来的状态。此时,若像图24的(a)和图24的(b)那样门部81的端面110全部位于比第1密封构件94靠输送空间9的位置,则根据锁紧机构、吸附部的种类,有时无法适当地进行盖体72相对于foup7的固定和盖体72相对于foup7的安装。因此,也可以使进行上述动作的位置位于比解除盖体72相对于foup7的固定和自foup7拆卸盖体72的位置朝向foup7侧靠近预定距离的位置。根据盖体72的膨胀率、锁紧机构、吸附部的种类,适当地设定该预定距离。
[0165]
在所述实施方式中,使用各自独立的第1气体注入喷嘴87、第2气体排出喷嘴88、第2气体注入喷嘴44c以及第2气体排出喷嘴44d来进行压力调整,但并不限定于此。
[0166]
如图25和图26所示,用于供给气体的第1供给喷嘴120与第2气体注入喷嘴44c合流。借助中间喷嘴121将第2气体排出喷嘴44d和第1气体注入喷嘴87连结起来。此外,借助连接喷嘴122将第2气体注入喷嘴44c和第2气体排出喷嘴88连结起来。中间喷嘴121在中途与第2供给喷嘴123合流。
[0167]
在如图25所示那样压力p1高于p2时,将第1阀125和第2阀126开放,将第3阀127~第6阀130关闭。因而,从第1供给喷嘴120供给来的气体经由第2气体注入喷嘴44c流入到foup7。从foup7排出来的气体从第2气体排出喷嘴44d经由第2阀126在中间喷嘴121内流动。然后,经由第1气体注入喷嘴87供给到密闭空间sd的气体从第2气体排出喷嘴88排出,按顺序流动到连接喷嘴122、第2气体注入喷嘴44c。在第2气体注入喷嘴44c中与从第1供给喷嘴120新供给来的气体合流。通过气体在上述流路中流动,从而foup7内的压力p1和密闭空间
sd内的压力p2接近。
[0168]
在如图26所示那样压力p1低于p2时,将第4阀128和第5阀129开放,将第1阀125~第3阀127以及第6阀130关闭。因而,经由第4阀128从第2供给喷嘴123供给来的气体经由中间喷嘴121和第1气体注入喷嘴87流入到密闭空间sd。从密闭空间sd排出来的气体按顺序在第2气体排出喷嘴88、连接喷嘴122中流动,经由第2气体注入喷嘴44c流入到foup7。从foup7排出来的气体从第2气体排出喷嘴44d经由第5阀129喷出到外部。通过气体在上述流路中流动,从而foup7内的压力p1和密闭空间sd内的压力p2接近。另外,在调整压力p1和p3的情况下,仅将配设于输送空间9的第3阀127开放。由此,能够借助第2气体注入喷嘴44c和连接喷嘴122使foup7和输送空间9连通并设为均压。
[0169]
在所述实施方式中,作为非活性气体,例示了氮,但并不限定于此,也可以使用干燥气体、氩气等期望的气体。
[0170]
在所述实施方式中,作为第1密封构件94、第2密封构件96,例示了o形密封圈,但并不限定于此,只要是担保密封性(密闭性)的构件即可。
[0171]
此外,作为密封构件,也可以配置利用流体的导入或者排出进行膨胀或者收缩的中空密封构件来替代o形密封圈。在将该中空密封构件应用于第1密封构件94的情况下,能够通过在使foup7抵接于基体41之后使中空密封构件膨胀来获得foup7与基体41之间的密合性。并且,为了进一步提高密合性,优选的是在利用夹紧单元50进行夹紧之后进行中空密封构件的膨胀。此时,利用通过夹紧作用的力和通过中空密封构件的膨胀作用的力压扁中空密封构件,能够提高密封性。
[0172]
在所述实施方式的步骤s4中,在将foup7夹紧于基体41时,使foup7朝向门部81靠近。但是,也可以取而代之,在形成了密闭空间sd之后,自门部81和盖体72被隔离开的状态使门部81朝向盖体72前进(参照图28)。另外,该前进是为了使门部81和盖体72靠近并使盖体72成为解锁状态而进行的。因而,既可以使门部81前进到在门部81和盖体72之间产生间隙的程度,也可以使门部81前进到与盖体72接触为止。若使门部81朝向盖体72前进,则o形密封圈96被按压而弹性变形,并维持密闭空间sd的密闭状态。
[0173]
在所述实施方式中,由基体41、o形密封圈94、95、盖体72以及门部81形成了密闭空间sd。但是,也可以是,通过采用使两个o形密封圈94、95一体而成的o形密封圈97(参照图29),由o形密封圈97、盖体72以及门部81形成密闭空间sd。
[0174]
附图标记说明
[0175]
3、壳体;7、foup(容器);9、输送空间;41、基体;50、夹紧单元(夹具);72、盖体;81、门部(门);87、第1气体注入喷嘴(第1气体注入部);88、第1气体排出喷嘴(第1气体排出部);92、开口部;94、o形密封圈(第1密封构件);96、o形密封圈(第2密封构件);sd、密闭空间。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。