技术特征:
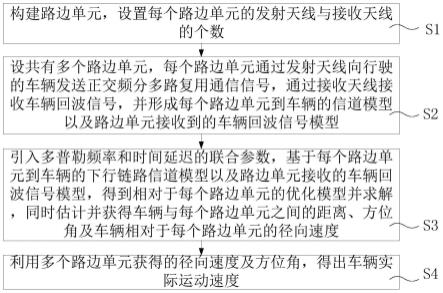
1.一种面向6g毫米波通感一体化系统的车辆定位与测速方法,其特征在于,所述方法面向6g毫米波通信感知一体化的车联网系统,包括以下步骤:s1.构建路边单元,设置每个路边单元的发射天线与接收天线的个数;s2.设共有多个路边单元,每个路边单元通过发射天线向行驶的车辆发送正交频分多路复用通信信号,通过接收天线接收车辆回波信号,并形成每个路边单元到车辆的信道模型以及路边单元接收到的车辆回波信号模型;s3.引入多普勒频率和时间延迟的联合参数,基于每个路边单元到车辆的下行链路信道模型以及路边单元接收的车辆回波信号模型,得到相对于每个路边单元的优化模型并求解,同时估计并获得车辆与每个路边单元之间的距离、方位角及车辆相对于每个路边单元的径向速度;s4.利用多个路边单元获得的径向速度及方位角,得出车辆实际运动速度。2.根据权利要求1所述的面向6g毫米波通感一体化系统的车辆定位与测速方法,其特征在于,在步骤s1中,构建的每个路边单元均具有n
t
个发射天线和n
r
个接收天线,每个路边单元和车辆均配置均匀线阵,即发射天线、接收天线中的相邻的天线之间的间隔距离相等,排成一行,共有j个路边单元,并且路边单元的位置是已知的。3.根据权利要求2所述的面向6g毫米波通感一体化系统的车辆定位与测速方法,其特征在于,车辆行驶在路上时,路边单元与车辆之间通信,每个路边单元通过发射天线向行驶的车辆发送正交频分多路复用通信信号,通过接收天线接收车辆回波信号ofdm,每个正交频分多路复用通信信号ofdm在传输至车辆后,被车辆车身反弹,路边单元接收到车辆的回波信号,考虑仅有直射径的毫米波多输入多输出mimo信道,这个过程为“路边单元—车辆—路边单元”双程;在每个路边单元通过发射天线向行驶的车辆发送正交频分多路复用通信信号,通过接收天线接收车辆回波信号ofdm,以及每个正交频分多路复用通信信号ofdm在传输至车辆后,被车辆车身反弹的过程中,每个正交频分多路复用通信信号ofdm的信令和循环前缀的长度超出最大延迟,信道相干时间内的一个间隔中双程时延toa、离开角aod、到达角aoa和信道衰落系数均不变。4.根据权利要求3所述的面向6g毫米波通感一体化系统的车辆定位与测速方法,其特征在于,对于每个路边单元,设θ表示车辆和路边单元形成的方位角,τ、h分别表示接收信号双程“路边单元—车辆—路边单元”的时延及复信道衰落系数,f
d
表示车辆运动导致的多普勒频移,其与车辆径向速度的关系为:其中,f表示载波频率,表示车辆的径向速度,α表示车辆运动方向与路边单元的夹角,c表示光速;设每个路边单元均有n个子载波,给定fd,τ,θ,h后,下行链路第n个子载波即每个路边单元到车辆的信道模型为:其中,表示天线阵列增益,a(θ),b(θ)表示路边单元阵列接收和发射导向矢
量,表达式分别为:量,表达式分别为:其中,λ
n
表示第n个子载波的波长,d
a
表示阵列元素之间的间隔,设为半波长。5.根据权利要求4所述的面向6g毫米波通感一体化系统的车辆定位与测速方法,其特征在于,对于每个路边单元,路边单元接收到的车辆回波信号模型表达式为:其中,p表示发射功率,s[n]表示第n个子载波传输的ofdm信号,z[n]表示高斯白噪声。6.根据权利要求5所述的面向6g毫米波通感一体化系统的车辆定位与测速方法,其特征在于,设引入多普勒频率和时间延迟的联合参数为q,即将多普勒频率和时间延迟打包成一个联合参数q,q=(f
n-f
d
)τ,对于每个路边单元的优化模型表示为:)τ,对于每个路边单元的优化模型表示为:)τ,对于每个路边单元的优化模型表示为:其中,表示对各个参数的估计,表示车辆的径向速度;在求解模型时,通过最小二乘牛顿迭代求解复信道系数h,到达角θ,时延-多普勒参数q,利用多载波信号消除多普勒频移对时间延迟估计的影响,再估计多普勒频率,即对每个载波求出然后利用求解时延估计,对于n表示载波序号,得到的结果里消除了多普勒频移参数,实现多载波信号消除多普勒频移对时延估计的影响,最终,不断迭代获得车辆与每个路边单元之间的距离、方位角及车辆相对于每个路边单元的径向速度。7.根据权利要求6所述的面向6g毫米波通感一体化系统的车辆定位与测速方法,其特征在于,在步骤s4中,利用多个路边单元获得的径向速度及方位角,得出车辆实际运动速度的过程在在云计算中心进行。8.根据权利要求7所述的面向6g毫米波通感一体化系统的车辆定位与测速方法,其特征在于,设在云计算中心中,利用两个路边单元获得的径向速度及方位角来得出车辆实际运动速度,过程为:设两个路边单元分别为第一路边单元和第二路边单元,表示车辆相对于第一路边单元的径向速度,表示车辆相对于第二路边单元的径向速度,则:
α
2-α1=θ
2-θ1最终,得到车辆实际运动速度的求取表达式为:其中,α1表示车辆运动方向与第一路边单元的夹角;α2表示车辆运动方向与第二路边单元的夹角;θ1表示车辆和第一路边单元形成的方位角;θ2表示车辆和第二路边单元形成的方位角,v表示车辆实际运动速度。9.一种面向6g毫米波通感一体化系统的车辆定位与测速系统,其特征在于,所述系统包括:若干个路边单元,每个路边单元均配置发射天线与接收天线,每个路边单元通过发射天线向行驶的车辆发送正交频分多路复用通信信号,通过接收天线接收车辆回波信号;模型构建模块,用于并形成每个路边单元到车辆的信道模型以及路边单元接收到的车辆回波信号模型;车辆定位模块,用于引入多普勒频率和时间延迟的联合参数,基于每个路边单元到车辆的下行链路信道模型以及路边单元接收的车辆回波信号模型,得到相对于每个路边单元的优化模型并求解,同时估计并获得车辆与每个路边单元之间的距离、方位角及车辆相对于每个路边单元的径向速度;车辆测速模块,用于利用多个路边单元获得的径向速度及方位角,得出车辆实际运动速度。10.根据权利要求9所述的面向6g毫米波通感一体化系统的车辆定位与测速系统,其特征在于,所述车辆测速模块位于云计算中心,在云计算中心中,车辆测速模块利用多个路边单元获得的径向速度及方位角,得出车辆实际运动速度。
技术总结
本发明提出一种面向6G毫米波通感一体化系统的车辆定位与测速方法,涉及车辆定位与测速的技术领域,针对车辆状态感知面临的随机信道衰落、多普勒效应等技术挑战,一是对每个路边单元接收到的回波信号进行处理,充分挖掘随机信道衰落及多普勒效应等信道模型的结构特点,采用多载波信号回波感知技术,将多普勒和时延打包为一个参数,利用多载波消除时延估计时多普勒频移的影响,推算车辆距离、方位角及信道状态,联合估计获得车辆与每个路边单元之间的距离、方位角及车辆相对于每个路边单元的径向速度;二是通过融合多个路边单元推算出的信息,计算得到车辆实际运行速度,本发明具有较好的定位与测速性能。较好的定位与测速性能。较好的定位与测速性能。
技术研发人员:马珊珊 周炳朋
受保护的技术使用者:中山大学
技术研发日:2022.08.09
技术公布日:2022/12/5
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。