1.本发明涉及扫地机器人及扫地机器人的控制方法,更详细而言,涉及一种使扫地机器人的抹布旋转且能够通过抹布和地板面之间的摩擦力来行驶和清扫地板面的扫地机器人及扫地机器人的控制方法。
背景技术:
2.近年来,随着工业技术的发展,开发出了在无需用户操作的情况下自主行驶需要清扫的区域的同时进行清扫的扫地机器人。这种扫地机器人具有能够识别要清扫的空间的传感器、能够清扫地板面的抹布等,可以在利用抹布等擦拭由传感器识别的空间的地板面的同时行驶。
3.为了有效地去除强力附着于地板面的异物,扫地机器人中有能够利用含有水分的抹布擦拭地板面的湿式扫地机器人。湿式扫地机器人构成为,具有水桶,容纳于水桶的水供应到抹布,抹布在含有水分的状态下擦拭地板面,从而能够有效地去除强力附着于地板面的异物。
4.湿式扫地机器人构成为,抹布形成为圆形,能够在旋转的同时与地板面接触而擦拭地板面。另外,还构成为,利用复数个抹布在旋转的同时与地板面接触的摩擦力,能够使扫地机器人朝特定方向行驶。
5.另一方面,抹布和地板面之间的摩擦力越大,则抹布越能够强力地擦拭地板面,因此扫地机器人能够有效地清扫地板面。
6.另一方面,美国授权专利us8452450b2公开了在地板面行驶的同时清扫的扫地机器人。
7.所述扫地机器人可以沿预设的行驶图案在地板面行驶。此时,扫地机器人可以在沿清扫区域的壁行驶的同时均匀地清扫清扫区域。即,所述扫地机器人持续前进直至识别障碍物,在感测到障碍物的情况下,可以转换方向行驶。
8.但是,在地板面的部分区域污染严重的情况下,存在扫地机器人仅经过一次是无法进行充分的清扫的限制。
9.另一方面,韩国授权专利kr1412582b1公开了设定清扫对象空间的规定清扫区域并仅清扫设定的区域的扫地机器人。
10.所述扫地机器人可以仅对清扫对象空间中发生污染的部分区域进行清扫。
11.但是,所述扫地机器人也针对部分区域仅经过一次,不会集中反复清扫发生污染的区域。因此,在部分区域污染严重的情况下,存在无法对其仔细地清扫的限制。
12.另一方面,日本公开专利jp2008-0108201a公开了在对障碍物、角落以及壁等进行回旋的同时往复行驶的扫地机器人。
13.所述扫地机器人将清扫区域划分成复数个移动范围,在每个移动范围行驶,移动范围可以与相邻的移动范围重叠。
14.但是,在所述扫地机器人的情况下,相邻的移动范围内的扫地机器人的行驶方向
彼此垂直,其结果,扫地机器人反复清扫两次清扫区域。
15.因此,所述扫地机器人只是对清扫区域整体执行两次清扫而已,存在无法对污染严重的特定区域执行反复清扫的限制,反而对污染少的区域不必要地清扫两次,从而存在浪费能源和清扫时间的限制。
16.因此,需要开发一种在对清扫区域执行整体清扫的同时能够对污染度高的特定区域执行反复清扫的扫地机器人。
技术实现要素:
17.发明所要解决的问题
18.本发明是为了改善所述现有的扫地机器人及扫地机器人的控制方法存在的问题而提出的,其目的在于,提供一种反复清扫地板面的扫地机器人及扫地机器人的控制方法。
19.另外,其目的在于,提供一种能够仔细地清扫污染严重的地板面的扫地机器人及扫地机器人的控制方法。
20.另外,其目的在于,提供一种在对清扫区域执行整体清扫的同时能够对污染度高的特定区域执行反复清扫的扫地机器人及扫地机器人的控制方法。
21.另外,其目的在于,提供一种缩短行驶和清扫所需的时间的扫地机器人及扫地机器人的控制方法。
22.解决问题的技术方案
23.为了实现上述目的,本发明的扫地机器人可以包括:本体,在内部形成有容纳电池、水桶以及马达的空间,在正面设置有缓冲件;以及一对旋转板,面向地板面的抹布结合于其下侧,所述一对旋转板可旋转地配置于所述本体的底面。
24.此时,所述本体在所述地板面上的规定的第一清扫区域行驶之后,在规定的第二清扫区域行驶,所述第二清扫区域可以与所述第一清扫区域重叠至少一部分。
25.所述本体可以在所述第一清扫区域和所述第二清扫区域重叠的位置旋转。
26.所述第一清扫区域以所述地板面上的障碍物或虚拟线为边界进行划分,若感测到到达所述边界,则所述本体可以旋转规定的方向转换角度。
27.为了实现上述目的,根据本发明的扫地机器人的控制方法,所述扫地机器人包括面向地板面的抹布结合于下侧的一对旋转板,并通过旋转所述一对旋转板进行行驶,其中,所述控制方法可以包括:区域设定步骤,在所述地板面上设定清扫区域;以及行驶步骤,所述扫地机器人在所述清扫区域行驶。
28.在所述区域设定步骤中,将所述清扫区域分成复数个划分区域来设定,复数个所述划分区域中的至少一部分可以彼此重叠。
29.所述区域设定步骤可以包括:清扫区域设定步骤,在所述地板面上设定所述清扫区域;以及划分区域设定步骤,将所述清扫区域分成复数个划分区域。
30.在所述区域设定步骤中,感测包括壁在内的障碍物,可以通过反映所述障碍物的位置来设定所述清扫区域的边界。
31.在所述区域设定步骤中,在所述清扫区域内可以设定矩形形状的虚拟的所述划分区域。
32.在所述区域设定步骤中,可以设定包括含有规定的出发位置的虚拟的第一出发线
和与所述第一出发线隔开规定距离而平行地形成的虚拟的第一到达线在内的所述划分区域。
33.在所述区域设定步骤中,可以设定包括含有规定的出发位置的虚拟的第一出发线和与所述第一出发线隔开规定距离而平行地形成的虚拟的第一到达线在内的第一划分区域,可以设定包括第二出发线和与所述第二出发线隔开规定距离而平行地形成的虚拟的第二到达线在内的第二划分区域。
34.此时,第二出发线可以与第一到达线重叠至少一部分。
35.或者,第二出发线可以设定在第一划分区域内。
36.在所述区域设定步骤中,在所述清扫区域内分别设定虚拟的第一划分区域和虚拟的第二划分区域,所述第一划分区域和所述第二划分区域的至少一部分彼此重叠,在所述行驶步骤中,所述扫地机器人可以在所述第一划分区域行驶之后,在所述第二划分区域行驶。
37.所述行驶步骤可以包括:第一区域行驶步骤,所述扫地机器人在所述划分区域中的某一划分区域行驶;以及第二区域行驶步骤,所述扫地机器人在所述划分区域中的另一划分区域行驶。
38.所述行驶步骤可以包括:第一前进行驶步骤,使所述扫地机器人从规定的第一出发线行驶至与所述第一出发线隔开规定距离而平行地形成的第一到达线;第一方向转换步骤,在所述第一前进行驶步骤之后,使所述扫地机器人旋转;第二前进行驶步骤,使所述扫地机器人从所述第一到达线行驶至所述第一出发线;以及第二方向转换步骤,在所述第二前进行驶步骤之后,使所述扫地机器人旋转。
39.在所述第一前进行驶步骤中,若所述扫地机器人在行驶期间感测到障碍物,则可以进入所述第一方向转换步骤。
40.在所述第一方向转换步骤中,可以使所述扫地机器人旋转规定的方向转换角度。
41.所述第一方向转换步骤中的所述扫地机器人的旋转角度和所述第二方向转换步骤中的所述扫地机器人的旋转角度可以相同,但所述第一方向转换步骤中的所述扫地机器人的旋转方向和所述第二方向转换步骤中的所述扫地机器人的旋转方向可以彼此相反。
42.在所述第一区域行驶步骤之前,还可以包括使所述扫地机器人配置到出发地点的第一行驶准备步骤。
43.在所述第二区域行驶步骤中,可以从所述划分区域彼此重叠的区域开始行驶。
44.在所述第二区域行驶步骤中,可以从所述第一区域行驶步骤结束的地点开始行驶。
45.在所述第一区域行驶步骤中,使所述扫地机器人从规定的出发地点开始行驶,并在行驶至间隔规定距离而形成的第一方向转换地点之后,将旋转和行驶反复复数次,在所述第二区域行驶步骤中,可以从所述第一方向转换地点开始行驶。
46.发明效果
47.如上所述,根据本发明的扫地机器人及扫地机器人的控制方法,将清扫区域分成复数个划分区域,复数个划分区域的至少一部分彼此重叠,扫地机器人在复数个划分区域行驶,因此在执行整体清扫的同时能够对特定区域执行反复清扫。
48.另外,将污染严重的部分设定为划分区域重叠的区域,在污染严重的地板面反复
行驶的同时能够仔细地清扫。
49.另外,具有缩短清扫整个清扫区域和反复清扫污染度高的部分所需的时间的效果。
附图说明
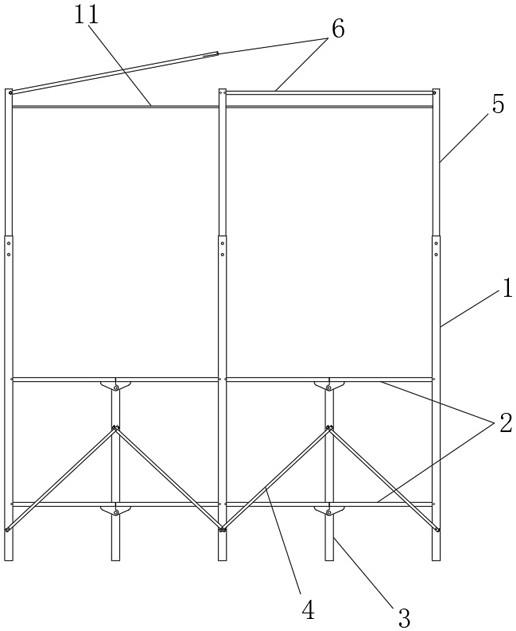
50.图1是示出本发明实施例的扫地机器人的立体图。
51.图2是在图1所示的扫地机器人中分离一部分构成并示出的图。
52.图3是示出图1所示的扫地机器人的后视图。
53.图4是示出本发明实施例的扫地机器人的仰视图。
54.图5是示出扫地机器人的分解立体图。
55.图6是概略示出本发明实施例的扫地机器人及其构成的剖视图。
56.图7是用于说明本发明实施例的扫地机器人的行驶方向的图。
57.图8是从上部观察本发明实施例的扫地机器人的概略图。
58.图9是本发明实施例的扫地机器人的框图。
59.图10是本发明一实施例的扫地机器人的控制方法的流程图。
60.图11是用于说明本发明一实施例的扫地机器人的控制方法中第一区域行驶步骤的流程图。
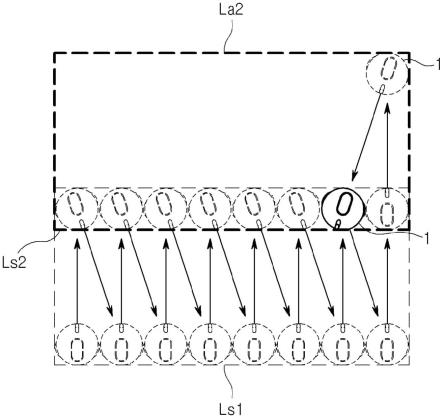
61.图12是用于说明本发明一实施例的扫地机器人的控制方法中区域设定步骤的概略图。
62.图13a至图13f是用于说明本发明一实施例的扫地机器人的控制方法中第一区域行驶步骤的概略图。
63.图14a至图14d是用于说明本发明一实施例的扫地机器人的控制方法中第二区域行驶步骤的概略图。
64.图15是用于说明本发明一实施例的扫地机器人的控制方法中扫地机器人在绘制曲线的同时前进的示例的概略图。
65.图16是用于说明本发明另一实施例的扫地机器人的控制方法中第一区域行驶步骤的概略图。
66.图17a和图17b是用于说明本发明又一实施例的扫地机器人的控制方法中为开始第二区域行驶步骤而朝出发地点移动的情形的概略图。
具体实施方式
67.以下,参照附图详细说明本发明的优选实施例。
68.本发明可以进行多样的变更,可以具有各种实施例,因此在附图中示出特定的实施例,并且在详细的说明中进行具体说明。这并不旨在将本发明限定为特定的实施方式,而是应当被解释为涵盖了本发明的思想和技术范围内包含的所有变更、等同物乃至替代物。
69.本技术中使用的术语仅用于说明特定的实施例,并不用来限定本发明。除非在上下文中另有明确说明,否则单数的表达可以包括复数的表达。
70.除非另有定义,包括技术或科学术语在内的这里所使用的所有术语可以与本发明所属领域的普通技术人员通常理解的含义相同。诸如在常用词典中定义的术语可以被解释
为具有与相关技术上下文中的含义一致的含义,除非在本技术中另有明确定义,否则可以不被解释为理想或过于形式的含义。
71.图1至图6公开了用于说明本发明实施例的扫地机器人的结构的结构图,图7和图8示出了用于说明本发明实施例的扫地机器人的行驶方向的图。
72.更具体而言,图1是示出扫地机器人1的立体图,图2是从扫地机器人1分离出一部分构成并示出的图,图3是扫地机器人1的后视图,图4是扫地机器人1的仰视图,图5是扫地机器人1的分解立体图,图6是扫地机器人1的内部剖视图。
73.以下,参照图1至图8,对本发明的扫地机器人1的结构进行说明。
74.扫地机器人1形成为,置于地板面并沿地板面b移动的同时利用抹布清扫地板面。因此,以下,以扫地机器人1置于地板面的状态为基准确定上下方向并进行说明。
75.并且,以第一旋转板10和第二旋转板20为基准,将后述的第一下部传感器123结合的一侧确定为前侧并进行说明。
76.在本发明中说明的各个构成的“最低部分”可以是,在扫地机器人1置于地板面使用时各个构成中位于最低的位置的部分,或者可以是最靠近地板面的部分。
77.扫地机器人1可以包括本体50、旋转板10、20以及抹布30、40。此时,旋转板10、20可以由包括第一旋转板10和第二旋转板20的一对形成,抹布30、40可以包括第一抹布30和第二抹布40。
78.本体50形成扫地机器人1的整体外形,或者可以形成为框架形态。在本体50可以结合有构成扫地机器人1的各个部件,构成扫地机器人1的一部分部件可以容纳于本体50的内部。本体50可以分为下部本体50a和上部本体50b,在下部本体50a和上部本体50b彼此结合而形成的空间上可以设置有包括电池135、水桶141以及马达56、57在内的扫地机器人1的部件(参照图5)。
79.第一旋转板10可以可旋转地配置于本体50的底面,第一抹布30可以结合于所述第一旋转板10的下侧。
80.第一旋转板10具有规定的面积,并且构成为扁平的板或扁平的框架等形态。这样的第一旋转板10大致横向卧置,由此,构成为其水平方向的宽度(或直径)充分大于上下方向高度的形态。结合于本体50的第一旋转板10可以与地板面b平行,或者可以与地板面b构成倾斜。第一旋转板10可以形成为圆形的板形状,第一旋转板10的底面可以形成为大致圆形,第一旋转板10可以形成为整体旋转对称的形态。
81.第二旋转板20可以可旋转地配置于本体50的底面,第二抹布40可以结合于所述第二旋转板20的下侧。
82.第二旋转板20具有规定的面积,并且构成为扁平的板或扁平的框架等形态。这样的第二旋转板20大致横向卧置,由此,构成为其水平方向的宽度(或直径)充分大于上下方向高度的形态。结合于本体50的第二旋转板20可以与地板面b平行,或者可以与地板面b构成倾斜。第二旋转板20可以形成为圆形的板形状,第二旋转板20的底面可以形成为大致圆形,第二旋转板20可以形成为整体旋转对称的形态。
83.扫地机器人1中第二旋转板20可以与第一旋转板10相同地构成,或者可以对称地构成。若第一旋转板10位于扫地机器人1的左侧,则第二旋转板20可以位于扫地机器人1的右侧,此时,第一旋转板10和第二旋转板20可以彼此左右对称。
84.第一抹布30可以以面向地板面b的方式结合于第一旋转板10的下侧。
85.第一抹布30形成为,朝地板面的底面具有规定的面积,第一抹布30形成为扁平的形态。第一抹布30形成为,水平方向的宽度(或直径)充分大于上下方向的高度的形态。第一抹布30结合于本体50的一侧,第一抹布30的底面可以与地板面b平行,或者可以与地板面b构成倾斜。
86.第一抹布30的底面可以形成为大致圆形,第一抹布30可以形成为整体旋转对称的形态。另外,第一抹布30可以装卸于第一旋转板10的底面,可以结合于第一旋转板10从而与第一旋转板10一起旋转。
87.第二抹布40可以以面向地板面b的方式结合于第二旋转板20的下侧。
88.第二抹布40形成为,朝地板面的底面具有规定的面积,第二抹布40形成为扁平的形态。第二抹布40形成为,水平方向的宽度(或直径)充分大于上下方向的高度的形态。第二抹布40结合于本体50的一侧,第二抹布40的底面可以与地板面b平行,或者可以与地板面b构成倾斜。
89.第二抹布40的底面可以形成为大致圆形,第二抹布40可以形成为整体旋转对称的形态。另外,第二抹布40可以装卸于第二旋转板20的底面,可以结合于第二旋转板20从而与第二旋转板20一起旋转。
90.在第一旋转板10和第二旋转板20按相同的速度向彼此相反的方向旋转的情况下,扫地机器人1可以沿直线方向移动,并且可以前进或后退。例如,在从上方观察时,在第一旋转板10以逆时针方向旋转且第二旋转板20以顺时针方向旋转的情况下,扫地机器人1可以向前移动。
91.在第一旋转板10和第二旋转板20中仅一个旋转板旋转的情况下,扫地机器人1可以改变方向,并且可以进行回旋。
92.在第一旋转板10的转速和第二旋转板20的转速彼此不同,或者第一旋转板10和第二旋转板20向相同的方向旋转的情况下,扫地机器人1可以在改变方向的同时移动,并且可以沿曲线方向移动。
93.扫地机器人1还可以包括第一下部传感器123。
94.第一下部传感器123形成于本体50的下侧,感测与地板面b之间的相对距离。第一下部传感器123可以在能够感测第一下部传感器123所形成的地点和地板面b之间的相对距离的范围内以多样的方式构成。
95.由第一下部传感器123感测到的与地板面b之间的相对距离(可以是与地板面垂直方向的距离,或者可以是与地板面倾斜方向的距离)超过规定值的情况或者超过规定范围的情况可能是地板面骤降的情况,由此第一下部传感器123可以感测悬崖。
96.第一下部传感器123可以由光传感器形成,其可以包括照射光的发光部和供反射的光入射的受光部。第一下部传感器123可以由红外线传感器形成。
97.第一下部传感器123可以被称为悬崖传感器(cliff sensor)。
98.扫地机器人1还可以包括第二下部传感器124和第三下部传感器125。
99.若将沿水平方向(与地板面b平行的方向)连接第一旋转板10的中心和第二旋转板20的中心的虚拟线称为连接线l1,则第二下部传感器124和第三下部传感器125可以形成为,以连接线l1为基准,可以在与第一下部传感器123相同的一侧形成于本体50的下侧,感
测与地板面b之间的相对距离(参照图4)。
100.第三下部传感器125可以以第一下部传感器123为基准形成在与第二下部传感器124相反的一侧。
101.第二下部传感器124和所述第三下部传感器125中的每一个可以在能够感测与地板面b之间的相对距离的范围内以多样的方式构成。第二下部传感器124和所述第三下部传感器125中的每一个除了其所形成的位置之外,可以与上述的第一下部传感器123相同地构成。
102.扫地机器人1还可以包括第一马达56、第二马达57、电池135、水桶141以及供水管道142。
103.第一马达56结合于本体50,使第一旋转板10旋转。具体而言,第一马达56可以形成为结合于本体50的电马达,可以与一个以上的齿轮连接而将旋转力传递到第一旋转板10。
104.第二马达57结合于本体50,使第二旋转板20旋转。具体而言,第二马达57可以形成为结合于本体50的电马达,可以与一个以上的齿轮连接而将旋转力传递到第二旋转板20。
105.如上所述,在扫地机器人1中,通过第一马达56的运转,可以旋转第一旋转板10和第一抹布30,通过第二马达57的运转,可以旋转第二旋转板20和第二抹布40。
106.第二马达57可以与第一马达56对称(左右对称)。
107.电池135形成为,结合于本体50,向构成扫地机器人1的其他构成供电。电池135可以将电源供应到第一马达56和第二马达57。
108.电池135可以利用外部的电源进行充电,为此,在本体50的一侧或电池135本身可以设置有用于对电池135进行充电的充电端子。
109.在扫地机器人1中,电池135可以结合于本体50。
110.水桶141形成为具有内部空间的容器形态,以便在其内部储存诸如水的液体。水桶141可以固定结合于本体50,或者可以以可装卸的方式结合于本体50。
111.在扫地机器人1中,供水管道142形成为管道或管形态,与水桶141连接,以供水桶141内部的液体通过其内部流动。供水管道142形成为,与水桶141连接的相反侧端部位于第一旋转板10和第二旋转板20的上侧,由此,能够使水桶141内部的液体供应到第一抹布30和第二抹布40侧。
112.在扫地机器人1中,供水管道142可以形成为一个管分支为两个的形式,此时,某一个分支的端部位于第一旋转板10的上侧,而另一个分支的端部可以位于第二旋转板20的上侧。
113.为了通过供水管道142移动液体,扫地机器人1可以设置有额外的水泵143。
114.扫地机器人1还可以包括缓冲件58、第一传感器121以及第二传感器122。
115.缓冲件58形成为沿本体50的边缘结合,相对本体50移动。例如,缓冲件58可以以能够沿靠近本体50的中央侧的方向往复移动的方式结合于本体50。
116.缓冲件58可以沿本体50的一部分边缘结合,或者可以沿本体50的整个边缘结合。
117.第一传感器121可以形成为,结合于本体50,感测缓冲件58的相对本体50的移动(相对移动)。这种第一传感器121可以使用微开关(microswitch)、光断路器(photo interrupter)或轻触开关(tact switch)等。
118.第二传感器122可以形成为,结合于本体50,感测与障碍物之间的相对距离。第二
传感器122可以形成为距离传感器。
119.另一方面,本发明实施例的扫地机器人1还可以包括位移传感器126。
120.位移传感器126配置于本体50的底面(背面),可以测量沿地板面移动的距离。
121.作为一例,位移传感器126可以使用利用光来获取地板面的影像信息的光学流量传感器(optical flow sensor;ofs)。在此,光学流量传感器(ofs)包括:图像传感器,通过拍摄地板面的影像来获取地板面的影像信息;以及一个以上的光源,调节光的量。
122.以光学流量传感器为例说明位移传感器126的动作。光学流量传感器设置于扫地机器人1的底面(背面),在移动过程中拍摄下方即地板面。光学流量传感器转换从图像传感器输入的下方影像并生成规定形式的下方影像信息。
123.通过这种构成,位移传感器126可以与滑动无关地检测规定地点和扫地机器人1的相对位置。即,利用光学流量传感器观察扫地机器人1的下方,从而能够实现由滑动引起的位置校正。
124.另一方面,本发明实施例的扫地机器人1还可以包括角度传感器127。
125.角度传感器127配置于本体50的内部,可以测量本体50的移动角度。
126.作为一例,角度传感器127可以使用测量本体50的转速的陀螺仪传感器(gyro sensor)。陀螺仪传感器可以利用转速来检测扫地机器人1的方向。
127.通过这种构成,角度传感器127可以检测规定的虚拟线与扫地机器人1行进的方向之间的角度。
128.另一方面,本发明还可以包括将一对旋转板10、20的旋转轴彼此连接的虚拟连接线l1。具体而言,连接线l1可以指,连接第一旋转板10的旋转轴和第二旋转板20的旋转轴的虚拟线。
129.连接线l1可以是划分扫地机器人1的前方和后方的基准。作为一例,可以将以连接线l1为基准第一下部传感器123所配置的方向称为扫地机器人1的前方,可以将以连接线l1为基准水桶141所配置的方向称为扫地机器人1的后方。
130.因此,以连接线l1为基准,在本体50的前方下侧可以配置有第一下部传感器123、第二下部传感器124以及第三下部传感器125,在本体50的前方外周面的内侧可以配置有第一传感器121,在本体50的前方上侧可以配置有第二传感器122。另外,以连接线l1为基准,在本体50的前方可以沿垂直于地板面b的方向插入结合有电池135。此外,以连接线l1为基准,在本体50的后方可以配置有位移传感器126。
131.因此,可以将以连接线l1为基准本体50中的第一传感器121和缓冲件58所在的方向称为本体50的正面,将与本体50的正面相反的方向称为本体50的背面。
132.另一方面,本发明中还可以包括虚拟的行驶方向线h,所述虚拟的行驶方向线h在连接线l1的中间点c与连接线l1垂直交叉且与地板面b平行地延伸。具体而言,行驶方向线h可以包括:前方行驶方向线hf,以连接线l1为基准,朝电池135所配置的方向与地板面b平行地延伸;以及后方行驶方向线hb,以连接线l1为基准,朝水桶141所配置的方向与地板面b平行地延伸。因此,在前方行驶方向线hf上可以配置有电池135和第一下部传感器123,在后方行驶方向线hb上可以配置有位移传感器126和水桶141。并且,以行驶方向线h为中心(基准),第一旋转板10和第二旋转板20可以对称(线对称)配置。
133.通过这种构成,行驶方向线h可以指,扫地机器人1行驶的方向。
134.即,可以将扫地机器人1沿前方行驶方向线hf行驶的情形称为前进,可以将扫地机器人1沿后方行驶方向线hb行驶的情形称为后退。
135.另一方面,为了帮助理解,以下,对本发明的扫地机器人1的前端进行说明。本发明中的扫地机器人1的前端可以指,以连接线l1为基准,沿水平方向朝前方凸出的距离最远的地点。作为一例,扫地机器人1的前端可以指,缓冲件58的外周面中前方行驶方向线hf通过的地点。
136.另外,扫地机器人1的后端可以指,以连接线l1为基准,沿水平方向朝后方凸出的距离最远的地点。作为一例,扫地机器人1的后端可以指,水桶141的外侧面中后方行驶方向线hb通过的地点。
137.另一方面,图9公开了本发明的图1所示的扫地机器人的框图。
138.参照图9,扫地机器人1可以包括控制部110、传感器部120、电源部130、供水部140、驱动部150、通信部160、显示部170以存储器180。图9的框图所示的构成要素在实现扫地机器人1方面并不是必须的,本说明书上说明的扫地机器人1可以具有比上面列出的构成要素更多或更少的构成要素。
139.首先,控制部110可以配置于本体50的内部,可以通过后述的通信部160与控制装置(未图示)无线通信连接。在这种情况下,控制部110可以向连接的控制装置(未图示)发送扫地机器人1的各种数据。并且,可以从连接的控制装置接收数据并将其存储。在此,从控制装置输入的数据可以是控制扫地机器人1的至少一种功能的控制信号。
140.换言之,扫地机器人1可以从控制装置接收基于用户输入的控制信号,并根据接收到的控制信号进行动作。
141.另外,控制部110可以控制扫地机器人的整体动作。控制部110控制为,使扫地机器人1能够根据存储于后述的存储器180的设定信息在被清扫面自主行驶的同时执行清扫动作。
142.另一方面,稍后对本发明中的控制部110的直行控制进行描述。
143.传感器部120可以包括上述的扫地机器人1的第一下部传感器123、第二下部传感器124、第三下部传感器125、第一传感器121以及第二传感器122中的一种以上。
144.换言之,传感器部120可以包括能够感测扫地机器人1周边的环境的彼此不同的复数个传感器,由传感器部120感测到的扫地机器人1周边的环境的信息可以通过控制部110发送到控制装置。在此,周边的环境的信息可以是,例如是否存在障碍物、是否感测到悬崖或是否感测到碰撞等。
145.控制部110可以构成为根据第一传感器121感测的信息来控制第一马达56和/或第二马达57的运转。例如,在扫地机器人1行驶途中缓冲件58与障碍物接触的情况下,可以通过第一传感器121掌握缓冲件58所接触的位置,控制部110可以控制第一马达56和/或第二马达57的运转以脱离这种接触位置。
146.另外,根据第二传感器122感测的信息,在扫地机器人1和障碍物之间的距离为规定值以下的情况下,控制部110可以控制第一马达56和/或第二马达57的运转,以转换扫地机器人1的行驶方向或者使扫地机器人1远离障碍物。
147.另外,根据由第一下部传感器123、第二下部传感器124或第三下部传感器125感测到的距离,控制部110可以控制第一马达56和/或第二马达57的运转,以使扫地机器人1停止
或转换行驶方向。
148.另外,根据由位移传感器126感测到的距离,控制部110可以控制第一马达56和/或第二马达57的运转,以使扫地机器人1转换行驶方向。例如,在扫地机器人1出现打滑而偏离输入的行驶路径或行驶模式的情况下,位移传感器126可以测量偏离输入的行驶路径或行驶模式的距离,控制部110可以控制第一马达56和/或第二马达57的运转,以对其进行补偿。
149.另外,根据由角度传感器127感测到的角度,控制部110可以控制第一马达56和/或第二马达57的运转,以使扫地机器人1转换行驶方向。例如,在扫地机器人1出现打滑而扫地机器人1所朝向的方向偏离输入的行驶方向的情况下,角度传感器127可以测量偏离输入的行驶方向的角度,控制部110可以控制第一马达56和/或第二马达57的运转,以对其进行补偿。
150.另一方面,电源部130通过控制部110的控制接收外部的电源、内部的电源,从而供应各个构成要素的动作所需的电源。电源部130可以包括上述的扫地机器人1的电池135。
151.供水部140可以包括上述的扫地机器人1的水桶141、供水管道142以及水泵143。供水部140可以形成为,根据控制部110的控制信号,在扫地机器人1的清扫动作过程中调节向第一抹布30和第二抹布40供应的液体(水)的供水量。为了调节所述供水量,控制部110可以控制驱动水泵143的马达的驱动时间。
152.驱动部150可以包括上述的扫地机器人1的第一马达56和第二马达57。驱动部150可以形成为,根据控制部110的控制信号使扫地机器人1进行旋转或直行运动。
153.另一方面,通信部160可以配置于本体50的内部,并且可以包括能够实现扫地机器人1和无线通信系统之间或者扫地机器人1和预设的周边设备或所述扫地机器人1和预设的外部服务器之间的无线通信的至少一个模块。
154.作为一例,所述至少一个模块可以包括用于红外线通信的ir(infrared)模块或用于超声波通信的超声波模块、或者wifi模块或蓝牙模块等短距离通信模块中的至少一种。或者,可以包括无线网络模块,从而能够通过wlan(wireless lan)、wi-fi(wireless-fidelity)等各种无线技术与预设的设备进行收发数据。
155.另一方面,显示部170显示给用户提供的信息。例如,显示部170可以包括显示画面的显示器。此时,所述显示器可以在本体50的上部面露出。
156.另外,显示部170可以包括输出声音的扬声器。作为一例,所述扬声器可以置于本体50的内部。此时,优选在本体50与所述扬声器的位置对应地形成有供声音通过的孔。扬声器输出的声音的来源可以是在扫地机器人1预存储的声音数据。例如,预存储的声音数据可以是对应于扫地机器人1的各个功能的语音引导或通知错误的警告音。
157.另外,显示部170可以由发光二极管(light emitting diode;led)、液晶显示装置(liquid crystal display;lcd)、等离子体显示面板(plasma display panel)、有机发光二极管(organic light emitting diode;oled)中的一种元件形成。
158.存储器180可以包括用于扫地机器人1的驱动和动作的各种数据。存储器180可以包括用于扫地机器人1自主行驶的应用程序和相关的各种数据。另外,可以存储在传感器部120中感测到的各个数据,可以包括用户选择或输入的各种设定(值)(例如,清扫预约时间、清扫模式、供水量、led亮度、警告音的音量大小等)的设定信息等。
159.另一方面,所述存储器180可以包括当前对扫地机器人1给定的被清扫面的信息。
作为一例,所述被清扫面的信息可以是扫地机器人1自己绘制的地图信息。并且,所述地图信息即地图(map)可以包括由用户对构成所述被清扫面的各个区域设定的各种信息。
160.另一方面,图10公开了本发明一实施例的扫地机器人的控制方法的流程图,图11公开了用于说明本发明一实施例的扫地机器人的控制方法中第一区域行驶步骤的流程图,图12公开了用于说明本发明一实施例的扫地机器人的控制方法中区域设定步骤的概略图,图13a至图13f公开了用于说明本发明一实施例的扫地机器人的控制方法中第一区域行驶步骤的概略图,图14a至图14d公开了用于说明本发明一实施例的扫地机器人的控制方法中第二区域行驶步骤的概略图。
161.以下,参照图1至图14,说明本发明一实施例的扫地机器人的控制方法。
162.作为本发明的前提,扫地机器人1可以包括关于地板面(被清扫面)的信息。即,在扫地机器人1的存储器180可以存储关于清扫区域的地图。作为一例,被清扫面的信息可以是扫地机器人1自行绘制的地图信息。
163.与此不同地,在扫地机器人1未存储关于地板面的地图时,或者在初始动作时,可以通过壁追踪(wall following)等在清扫区域行驶并生成地图。另外,扫地机器人1在没有地图的状态下,可以通过对地板面b执行清扫而获取的障碍物信息来生成地图。
164.另外,传感器部120可以在扫地机器人1行驶期间或开始行驶之前感测包括壁面等在内的障碍物,扫地机器人1可以通过这种障碍物信息生成地板面b的地图。
165.另一方面,扫地机器人1的地图生成方法可以适用公知的各种方式,省略对其的详细说明。
166.本发明一实施例的扫地机器人的控制方法包括区域设定步骤s100、行驶准备步骤s200、行驶步骤s300以及行驶结束步骤s400。
167.区域设定步骤s100包括清扫区域设定步骤s110和划分区域设定步骤s130。
168.在清扫区域设定步骤s110中,可以在地板面b上设定清扫区域a。
169.例如,在清扫区域设定步骤s110中,用户通过终端(未图示)等输入特定位置的坐标或特定结构物,从而可以设定清扫区域a。
170.或者,在清扫区域设定步骤s110中,传感器部120感测包括壁、家具、结构物等在内的障碍物o,控制部110可以通过反映所述障碍物o的位置来设定清扫区域a。
171.因此,在清扫区域设定步骤s110中,通过用户的输入或控制部110的障碍物o的感测,可以设定清扫区域a的边界b。
172.在划分区域设定步骤s130中,可以将清扫区域设定步骤s110中设定的清扫区域a分成复数个划分区域a1、a2、...an。
173.在划分区域设定步骤s130中,控制部110可以在清扫区域a内设定矩形形状的虚拟划分区域a1、a2、...an。
174.具体而言,在划分区域设定步骤s130中,控制部110可以设定由第一出发线ls1、第一到达线la1以及一对第一连接线lc1包围的第一划分区域a1(s131)。
175.此时,第一出发线ls1可以是包括规定出发位置ps的清扫区域a内的虚拟线。另外,第一到达线la1可以是与第一出发线ls1隔开规定距离而平行地形成的虚拟线。即,第一出发线ls1和第一到达线la1可以沿第一方向隔开规定的第一距离d1而平行地设定。
176.此时,第一方向可以是后述的第一前进行驶步骤s311中扫地机器人1前进行驶的
方向。
177.并且,第一连接线lc1可以是连接第一出发线ls1和第一到达线la1的虚拟线。例如,一对第一连接线lc1可以沿第二方向隔开规定的第二距离d2而平行地设定。此时,第二方向可以是与第一方向彼此垂直的方向。
178.因此,第一划分区域a1可以是在第一方向上具有规定的第一距离d1的长度和在第二方向上具有规定的第二距离d2的宽度的地板面上的区域。
179.另一方面,作为另一例,第一连接线lc1可以通过感测壁面等障碍物而设定。即,由传感器部120感测壁面等障碍物,控制部110可以在障碍物的位置上设定虚拟的第一连接线lc1。
180.并且,在划分区域设定步骤s130中,控制部110可以设定与第一划分区域a1重叠至少一部分的第二划分区域a2(s132)。
181.控制部110可以设定由第二出发线ls2、第二到达线la2以及一对第二连接线lc2包围的第二划分区域a2。
182.此时,第二出发线ls2可以在第一划分区域a1内设定。
183.作为一例,第二出发线ls2可以设定为,比第一到达线la1更靠近第一出发线ls1。因此,在第一到达线la1和第二出发线ls2之间的区域中第一划分区域a1和第二划分区域a2可以彼此重叠。
184.作为另一例,第二出发线ls2可以在与第一到达线la1相同的位置上重叠设定。此时,在后述的第一区域行驶步骤s310中,扫地机器人1在第一到达线la1上旋转,在后述的第二区域行驶步骤s330中,扫地机器人1在第二出发线ls2上旋转,因此扫地机器人1清扫地板面b的区域可以重叠。
185.另一方面,在划分区域设定步骤s130中,控制部110感测地板面b的污染程度,可以将污染程度高的特定位置设定为第一划分区域a1和第二划分区域a2彼此重叠的区域。即,在划分区域设定步骤s130中,控制部110可以设定第一到达线la1和第二出发线ls2,以使污染程度高的特定位置配置在第一到达线la1和第二出发线ls2之间。或者,控制部110可以设定第一到达线la1和第二出发线ls2,以使污染程度高的特定位置配置在第一到达线la1和第二出发线ls2的同一线上。
186.通过这种构成,本发明的扫地机器人1具有在污染严重的区域的地板面b反复行驶的同时能够仔细地清扫的效果。
187.另外,第二到达线la2可以是与第二出发线ls2隔开规定距离而平行地形成的虚拟线。并且,第二连接线lc2可以是连接第二出发线ls2和第二到达线la2的虚拟线。
188.并且,虽然未图示,但根据实施例,在划分区域设定步骤s130中,控制部110还可以设定与第一划分区域a1或第二划分区域a2重叠至少一部分的第三划分区域a3(s133)。
189.另一方面,设定第三划分区域a3的步骤s133可以援用设定第二划分区域a2的步骤s132中的过程。
190.并且,在划分区域设定步骤s130中,控制部110也可以以上述方式设定第四划分区域a4、第五划分区域a5等。
191.因此,在划分区域设定步骤s130中,控制部110将清扫区域a分成复数个划分区域a1、a2、...an来设定,复数个划分区域a1、a2、...an可以设定为至少一部分彼此重叠(参照
图12)。
192.并且,在划分区域设定步骤s130中,控制部110可以设定扫地机器人1开始后述的行驶步骤s300的出发地点ps。
193.在划分区域设定步骤s130中,控制部110可以将第一划分区域a1内的规定地点设定为出发地点ps。例如,在划分区域设定步骤s130中,控制部110可以将第一出发线ls1和第一连接线lc1彼此连接的两个地点中的某一地点设定为出发地点ps。即,在划分区域设定步骤s130中,控制部110可以将矩形形状的第一划分区域a1中对应于边角的地点设定为出发地点ps。通过这种构成,扫地机器人1在行驶步骤s300开始时可以沿一对第一连接线lc1中的某一第一连接线lc1开始直线行驶,因此具有能够仔细地清扫清扫区域a的外围的效果。
194.接下来,在行驶准备步骤s200中,控制部110可以使扫地机器人1配置到出发地点ps。
195.此时,在扫地机器人1没有位于出发地点ps的情况下,控制部110可以控制为,使扫地机器人1移动至出发地点ps。
196.另一方面,若扫地机器人1位于出发地点ps,则控制部110可以控制为,使本体50的正面51朝向最初的方向转换地点pt1。最初的方向转换地点pt1存在于第一到达线la1上,连接出发地点ps和最初的方向转换地点pt1的虚拟线可以与第一出发线ls1和/或第一到达线la1彼此正交。
197.例如,控制部110可以控制为,使扫地机器人1的行驶方向线h朝向最初的方向转换地点pt1。具体而言,控制部110运算行驶方向线h和最初的方向转换地点pt1之间的角度差,通过使第一马达56和/或第二马达57驱动来使扫地机器人1旋转所述角度差,从而可以使行驶方向线h和最初的方向转换地点pt1一致。
198.此时,控制部110可以使第一马达56和第二马达57以相同的旋转方向和相同的转速进行驱动,以使扫地机器人1在原地旋转。即,使第一旋转板10和第二旋转板20以相同的旋转方向和相同的转速旋转,从而可以使扫地机器人1在原地旋转。
199.另一方面,根据实施例,若扫地机器人1原地旋转时出现打滑,则控制部110可以对其进行补偿控制。
200.此外,若本体50的正面51朝向最初的方向转换地点pt1,则控制部110可以开始行驶步骤s300。
201.在行驶步骤s300中,控制部110可以控制为,使扫地机器人1在清扫区域a行驶。
202.具体而言,在行驶步骤s300中,扫地机器人a可以在复数个划分区域a1、a2、...an行驶。此时,控制部110可以在复数个划分区域a1、a2、...an设定每个划分区域的顺序,可以按照该顺序在复数个划分区域a1、a2、...an行驶。
203.例如,在区域设定步骤s100中,在将清扫区域a分成第一划分区域a1和第二划分区域a2来设定的情况下,在行驶步骤s300中,扫地机器人1可以在第一划分区域a1行驶之后,在第二划分区域a2行驶。
204.在行驶步骤s300中,可以包括第一区域行驶步骤s310和第二区域行驶步骤s330。
205.在第一区域行驶步骤s310中,扫地机器人1可以在划分区域a1、a2、...an中的某一划分区域行驶。例如,在第一区域行驶步骤s310中,扫地机器人1可以在第一划分区域a1行驶。此时,在第一区域行驶步骤s310中,控制部110可以使扫地机器人1从出发地点ps出发并
行驶至第一到达地点pa1,在此过程中,可以将前进行驶和旋转行驶反复复数次。
206.此时,出发地点ps可以位于矩形形状的第一划分区域a1的某一边角,第一到达地点pa1可以是第一划分区域a1中位于所述出发地点ps的对角线上的边角。
207.具体而言,第一区域行驶步骤s310可以包括第一前进行驶步骤s311、第一方向转换步骤s312、第二前进行驶步骤s313以及第二方向转换步骤s314。
208.在第一前进行驶步骤s311中,控制部110可以使扫地机器人1从第一出发线ls1行驶至第一到达线la1。具体而言,在第一前进行驶步骤s311中,扫地机器人1可以从规定的第一出发线ls1上的一地点出发并前进行驶至规定的第一到达线la1上的一地点。此时,所述第一到达线la1上的一地点可以配置在距所述第一出发线ls1上的一地点最短的距离。即,在第一前进行驶步骤s311中,扫地机器人1可以从第一出发线ls1沿与第一出发线ls1垂直的方向前进行驶至第一到达线la1。
209.作为一例,在行驶准备步骤s200之后,扫地机器人1可以从出发地点ps出发并行驶至第一到达线la1上的最初的方向转换地点pt1。
210.作为另一例,在将第一前进行驶步骤s311、第一方向转换步骤s312、第二前进行驶步骤s313以及第二方向转换步骤s314反复复数(n)次之后,扫地机器人1可以从第一出发线ls1上的某一地点(第n 1地点)出发并行驶至第一到达线la1上的某一地点(第n 1地点)。
211.若在第一前进行驶步骤s311中扫地机器人1开始行驶,则控制部110可以使第一马达56和第二马达57朝彼此相反的方向旋转。例如,在从地板面的上方观察时,在第一旋转板10以逆时针方向旋转且第二旋转板20以顺时针方向旋转的情况下,扫地机器人1可以向前移动。
212.作为一例,在第一前进行驶步骤s311中,控制部110可以使扫地机器人1从第一出发线ls1直行行驶至第一到达线la1。此时,第一旋转板10和第二旋转板20朝彼此相反的方向旋转,第一旋转板10的转速ω1和第二旋转板20的转速ω2可以彼此相同(ω1=ω2)。即,在第一前进行驶步骤s311中,控制部110可以使第一马达56和第二马达57以相同的输出驱动。并且,在第一前进行驶步骤s311中,第一抹布30对地板面b的相对移动速度v1和第二抹布40对地板面b的相对移动速度v2可以相同(v1=v2)。
213.在第一前进行驶步骤s311中,控制部110可以根据由位移传感器126感测到的距第一出发线ls1的距离,停止扫地机器人1的行驶。作为一例,在第一前进行驶步骤s311中,在由位移传感器126感测到的第一出发线ls1至扫地机器人1的距离等于所述第一距离d1的情况下,控制部110可以停止扫地机器人1的行驶。作为另一例,在第一前进行驶步骤s311中,控制部110感测扫地机器人1的坐标,在判断为扫地机器人1到达第一到达线la1的情况下,可以停止扫地机器人1的行驶。
214.另一方面,在第一前进行驶步骤s311中,若扫地机器人1在行驶期间感测到障碍物o,则可以进入第一方向转换步骤s312。具体而言,传感器部120可以在扫地机器人1的行驶期间感测扫地机器人1与障碍物发生了碰撞,或者可以感测扫地机器人1的前进方向规定距离范围内出现了障碍物。此时,若控制部110从传感器部120接收了感测到障碍物的信号,则可以停止扫地机器人1的行驶。在这种情况下,即使扫地机器人1未到达第一到达线la1,也可以进入第一方向转换步骤s312(参照图13a)。
215.在第一方向转换步骤s312中,控制部110在第一前进行驶步骤s311之后,可以使扫
地机器人1在第一到达线la1上朝第一出发线ls1旋转。
216.在第一方向转换步骤s312中,控制部110可以使扫地机器人1旋转。即,扫地机器人1在第一前进行驶步骤s311中行驶至第一到达线la1之后,可以在第一方向转换步骤s312中旋转。
217.具体而言,在第一方向转换步骤s312中,扫地机器人1可以在地板面上停止的状态下旋转。即,在第一方向转换步骤s312中,控制部110可以控制为,使第一马达56和第二马达57朝相同的方向运转。在这种情况下,一对旋转板10、20可以朝相同的方向旋转。因此,第一抹布30和第二抹布40可以朝相同的方向旋转。
218.作为一例,在从垂直于地板面(地表面)的上侧向下观察时,在使扫地机器人1以逆时针方向旋转的情况下,控制部110可以使第一马达56和第二马达57驱动,以使第一旋转板10和第二旋转板20以顺时针方向旋转。因此,第一抹布30和第二抹布40与第一旋转板10和第二旋转板20一起以顺时针方向旋转,在与地板面b摩擦的同时相对旋转,从而可以使扫地机器人1以逆时针方向旋转。
219.作为另一例,在从垂直于地板面(地表面)的上侧向下观察时,在使扫地机器人1以顺时针方向旋转的情况下,控制部110可以使第一马达56和第二马达57驱动,以使第一旋转板10和第二旋转板20以逆时针方向旋转。因此,第一抹布30和第二抹布40与第一旋转板10和第二旋转板20一起以逆时针方向旋转,在与地板面b摩擦的同时相对旋转,从而可以使扫地机器人1以顺时针方向旋转。
220.在第一方向转换步骤s312中,在旋转行驶开始时,控制部110可以使一对旋转板10、20以相同的速度(ω1=ω2)旋转。即,在方向转换步骤s40中,控制部110可以使第一马达56和第二马达57以相同的输出驱动。并且,在方向转换步骤s40中,第一抹布30对地板面b的相对移动速度v1和第二抹布40对地板面b的相对移动速度v2的大小(绝对值)可以相同。
221.与此不同地,在第一方向转换步骤s312中,扫地机器人1也可以在地板面上移动的同时旋转。即,在第一方向转换步骤s312中,控制部110通过控制第一马达56和第二马达57来使一对旋转板10、20朝彼此相反的方向或相同的方向旋转,但可以一对旋转板10、20的转速彼此不同。在这种情况下,扫地机器人1可以在地板面上绘制弧的同时旋转移动。
222.在第一方向转换步骤s312中,控制部110可以使扫地机器人1朝第一出发线ls1旋转。
223.具体而言,执行第一前进行驶步骤s311的扫地机器人1位于构成第一划分区域a1的边界的第一到达线la1上。此时,扫地机器人1的本体50的正面51面向第一划分区域a1的外侧。即,在第一前进行驶步骤s311结束的时间点,本体50的正面51面向远离第一出发线ls1的方向。
224.并且,在第一方向转换步骤s312中,控制部110以扫地机器人1的本体50的正面51所朝向的方向为基准,可以使扫地机器人1的本体50旋转预设的第一方向转换角度θ1。
225.此时,扫地机器人1旋转的方向可以是远离在出发地点ps扫地机器人1相接的第一连接线lc1的方向。例如,在出发地点ps1和第一方向转换地点pt1中第一连接线lc1位于扫地机器人1的左侧的情况下,在第一方向转换步骤s312中,控制部110可以使扫地机器人1以顺时针方向或逆时针方向旋转,使得扫地机器人1的正面朝向右侧。
226.在第一方向转换步骤s312中,可以使扫地机器人1旋转规定的第一方向转换角度θ
1。
227.此时,第一方向转换角度θ1可以是135度以上且180度以下,但不限于此,可以包括能够使第一前进行驶步骤s311中扫地机器人1清扫地板面b的区域和后述的第二前进行驶步骤s313中扫地机器人1清扫地板面b的区域彼此重叠的各种角度。
228.其结果,在结束第一前进行驶步骤s311的状态下,朝向第一划分区域a1的外侧的本体50的正面51可以通过第一方向转换步骤s312旋转至面向第一出发线ls1(参照图13b)。
229.在第二前进行驶步骤s313中,控制部110可以使扫地机器人1从第一到达线la1行驶至第一出发线ls1。具体而言,在第二前进行驶步骤s313中,扫地机器人1可以从规定的第一到达线la1上的一地点出发并前进行驶至规定的第一出发线ls1上的一地点。
230.此时,第二前进行驶步骤s313中扫地机器人1行驶到达的第一出发线ls1上的地点可以与第一前进行驶步骤s311中扫地机器人1出发的第一出发线ls1上的地点不同。
231.具体而言,第二前进行驶步骤s313中扫地机器人1行驶到达的第一出发线ls1上的地点和之前的第一前进行驶步骤s311中扫地机器人1出发的第一出发线ls1上的地点可以在第一出发线ls1上隔开规定间隔配置。例如,在将扫地机器人1的直径称为r时,所述两个地点可以隔开0.5r以上且r以下的间隔配置。
232.通过这种构成,第二前进行驶步骤s313中扫地机器人1行驶的同时清扫的区域可以与第一前进行驶步骤s311中扫地机器人1行驶的同时清扫的区域部分重叠。因此,扫地机器人1可以仔细地反复清扫清扫区域a。
233.在第二前进行驶步骤s313中,若扫地机器人1开始行驶,则控制部110可以使第一马达56和第二马达57朝彼此相反的方向旋转。例如,在从地板面的上方观察时,在第一旋转板10以逆时针方向旋转且第二旋转板20以顺时针方向旋转的情况下,扫地机器人1可以向前移动。
234.作为一例,在第二前进行驶步骤s313中,控制部110可以使扫地机器人1第一到达线la1直行行驶至从第一出发线ls1。此时,第一旋转板10和第二旋转板20朝彼此相反的方向旋转,第一旋转板10的转速ω1和第二旋转板20的转速ω2可以彼此相同(ω1=ω2)。即,在第二前进行驶步骤s313中,控制部110可以使第一马达56和第二马达57以相同的输出驱动。并且,在第二前进行驶步骤s313中,第一抹布30对地板面b的相对移动速度v1和第二抹布40对地板面b的相对移动速度v2可以相同(v1=v2)(参照图13c)。
235.作为另一例,控制部110可以使扫地机器人1沿具有规定曲率的路径从第一出发线ls1行驶至第一到达线la1。此时,第一旋转板10和第二旋转板20朝彼此相反的方向旋转,且第一旋转板10和第二旋转板20的转速可以彼此不同。此时,第一旋转板10和第二旋转板20的转速差(ω1-ω2=
△
ω)可以恒定(参照图15)。
236.在第二前进行驶步骤s313中,控制部110可以根据由位移传感器126感测到的距第一到达线la1的距离,停止扫地机器人1行驶。作为一例,在第二前进行驶步骤s313中,在由位移传感器126感测到的第一到达线la1至扫地机器人1的距离等于所述第一距离d1的情况下,控制部110可以停止扫地机器人1的行驶。作为另一例,在第二前进行驶步骤s313中,控制部110感测扫地机器人1的坐标,在判断为扫地机器人1到达第一出发线ls1的情况下,可以停止扫地机器人1的行驶。
237.另一方面,在第二前进行驶步骤s313中,若扫地机器人1在行驶期间感测到障碍物
o,则可以进入第二方向转换步骤s314。具体而言,传感器部120可以在扫地机器人1的行驶期间感测扫地机器人1与障碍物发生了碰撞,或者可以感测扫地机器人1的前进方向的规定距离范围内出现了障碍物。此时,若控制部110从传感器部120接收了感测到障碍物的信号,则可以停止扫地机器人1的行驶。在这种情况下,即使扫地机器人1未到达第一出发线ls1,也可以进入第二方向转换步骤s314(参照图13f)。
238.在第二方向转换步骤s314中,控制部110在第二前进行驶步骤s313之后,可以在第一出发线ls1上使扫地机器人1朝第一到达线la1旋转。
239.在第二方向转换步骤s314中,控制部110可以使扫地机器人1旋转。即,扫地机器人1在第二前进行驶步骤s313中行驶至第一出发线ls1之后,可以在第二方向转换步骤s314中旋转。
240.具体而言,在第二方向转换步骤s314中,扫地机器人1可以在地板面上停止的状态下旋转。即,在第二方向转换步骤s314中,控制部110可以控制为,使第一马达56和第二马达57朝相同的方向运转。在这种情况下,一对旋转板10、20可以朝相同的方向旋转。因此,第一抹布30和第二抹布40可以朝相同的方向旋转。
241.作为一例,在从垂直于地板面(地板面)的上侧向下观察时,在使扫地机器人1以逆时针方向旋转的情况下,控制部110可以使第一马达56和第二马达57驱动,以使第一旋转板10和第二旋转板20以顺时针方向旋转。因此,第一抹布30和第二抹布40与第一旋转板10和第二旋转板20一起以顺时针方向旋转,在与地板面b摩擦的同时相对旋转,从而可以使扫地机器人1以逆时针方向旋转。
242.作为另一例,在从垂直于地板面(地表面)的上侧向下观察时,在使扫地机器人1以顺时针方向旋转的情况下,控制部110可以使第一马达56和第二马达57驱动,以使第一旋转板10和第二旋转板20以逆时针方向旋转。因此,第一抹布30和第二抹布40与第一旋转板10和第二旋转板20一起以逆时针方向旋转,在与地板面b摩擦的同时相对旋转,从而可以使扫地机器人1以顺时针方向旋转。
243.在第二方向转换步骤s314中,在旋转行驶开始时,控制部110可以使一对旋转板10、20以相同的速度(ω1=ω2)旋转。即,在第二方向转换步骤s314中,控制部110可以使第一马达56和第二马达57以相同的输出驱动。并且,在第二方向转换步骤s314中,第一抹布30对地板面b的相对移动速度v1和第二抹布40对地板面b的相对移动速度v2的大小(绝对值)可以相同。
244.与此不同地,在第二方向转换步骤s314中,扫地机器人1可以在地板面上移动的同时旋转。即,在第二方向转换步骤s314中,控制部110通过控制第一马达56和第二马达57来使一对旋转板10、20朝彼此相反的方向或相同的方向旋转,但可以使一对旋转板10、20的转速彼此不同。在这种情况下,扫地机器人1可以在地板面上绘制弧的同时旋转移动。
245.在第二方向转换步骤s314中,控制部110可以使扫地机器人1朝第一到达线la1旋转。
246.具体而言,执行了第二前进行驶步骤s313的扫地机器人1位于构成第一划分区域a1的边界的第一出发线ls1上。此时,扫地机器人1的本体50的正面51面向第一划分区域a1的外侧。即,在第二前进行驶步骤s313结束的时间点,本体50的正面51面向远离第一到达线la1的方向。
247.另一方面,第一方向转换步骤s312中的扫地机器人1的旋转角度和第二方向转换步骤s314中的扫地机器人1的旋转角度可以相同,但第一方向转换步骤s312中的扫地机器人1的旋转方向和第二方向转换步骤s314中的扫地机器人1的旋转方向可以彼此相反。
248.即,在第二方向转换步骤s314中,控制部110以扫地机器人1的本体50的正面51所朝向的方向为基准,可以使扫地机器人1的本体50旋转预设的第一方向转换角度θ1。
249.并且,若第一方向转换步骤s312中扫地机器人1以顺时针方向旋转,则第二方向转换步骤s314中扫地机器人1可以以逆时针方向旋转,若第一方向转换步骤s312中扫地机器人1以逆时针方向旋转,则第二方向转换步骤s314中扫地机器人1可以以顺时针方向旋转。
250.其结果,在结束第二前进行驶步骤s313的状态下朝向第一划分区域a1的外侧的本体50的正面51可以通过第二方向转换步骤s314旋转成面向第一到达线la1(参照图13d)。
251.另一方面,在本发明一实施例的扫地机器人的控制方法中,在扫地机器人1到达第一连接线lc1的情况下,扫地机器人1在执行第一前进行驶步骤s311之后结束第一区域行驶步骤s310,并可以进入第二区域行驶步骤s320。
252.具体而言,控制部110根据由传感器部120感测到的距第一连接线lc1的距离,可以判断扫地机器人1是否到达第一连接线lc1。
253.例如,在第二前进行驶步骤s313或第二方向转换步骤s314中,控制部110可以通过感测扫地机器人1的坐标来判断扫地机器人1是否到达第一连接线lc1。或者,在第二方向转换步骤s314中,控制部110通过传感器部120感测扫地机器人1与包括壁面等在内的障碍物之间的距离,在扫地机器人1与障碍物之间的距离为规定距离范围以内的情况下,可以判断为扫地机器人1已到达第一连接线lc1。或者,在第二前进行驶步骤s313中,在通过传感器部120感测到扫地机器人1与障碍物碰撞的情况下,控制部110可以判断为扫地机器人1已到达第一连接线lc1。
254.并且,若判断为扫地机器人1到达第一连接线lc1,则控制部110可以使扫地机器人1在执行第一前进行驶步骤s311之后在第一到达线la1上停止。在这种状态下,控制部110可以结束第一区域行驶步骤s310,并执行后述的第二区域行驶步骤s320。
255.另一方面,若判断为扫地机器人1未到达第一连接线lc1,则控制部110可以在第二方向转换步骤s314之后反复执行第一区域行驶步骤s310。即,在扫地机器人1未到达第一连接线lc1的情况下,扫地机器人1可以依次反复执行第一前进行驶步骤s311、第一方向转换步骤s312、第二前进行驶步骤s313以及第二方向转换步骤s314(参照图13f)。
256.在第二区域行驶步骤s330中,控制部110可以使扫地机器人1在划分区域a1、a2、...an中与第一区域行驶步骤s310中行驶的区域不同的另一区域行驶。例如,在第二区域行驶步骤s330中,扫地机器人1可以在第二划分区域a2行驶。此时,在第二区域行驶步骤s330中,控制部110可以使扫地机器人1从第二出发地点ps2出发并行驶至第二到达地点pa2,在此过程中,可以将前进行驶和旋转行驶反复复数次。
257.此时,第二出发地点ps2可以位于矩形形状的第二划分区域a2的某一边角,第二到达地点pa2可以是第二划分区域a2中位于所述第二出发地点ps2的对角线上的边角。
258.在第二区域行驶步骤s330中,扫地机器人1可以从划分区域a1、a2、...an中彼此重叠的区域ao开始行驶。
259.例如,在第二区域行驶步骤s330中,扫地机器人1可以从第一区域行驶步骤s310结
束的地点开始行驶。即,在本实施例中,第一到达地点pa1和第二出发地点ps2可以相同。
260.通过这种构成,扫地机器人1在结束第一区域行驶步骤s310的同时立即执行第二区域行驶步骤s330,从而可以缩短在清扫区域a行驶的整体时间。
261.第二区域行驶步骤s330可以包括第一前进行驶步骤s331、第一方向转换步骤s332、第二前进行驶步骤s333以及第二方向转换步骤s334。另一方面,为了避免重复说明,除特别说明的内容之外,第二区域行驶步骤s330的第一前进行驶步骤s331、第一方向转换步骤s332、第二前进行驶步骤s333以及第二方向转换步骤s334可以分别援用第一区域行驶步骤s310的第一前进行驶步骤s311、第一方向转换步骤s312、第二前进行驶步骤s313以及第二方向转换步骤s314的内容。
262.在第一前进行驶步骤s331中,控制部110可以使扫地机器人1从第二出发线ls2行驶至第二到达线la2。具体而言,在第一前进行驶步骤s331中,扫地机器人1从规定的第二出发线ls2上的一地点出发并前进行驶至规定的第二到达线la2上的一地点。此时,所述第二到达线la2上的一地点可以配置在距所述第二出发线ls2上的一地点最短的距离。
263.在第一方向转换步骤s332中,控制部110在第一前进行驶步骤s331之后,可以在第二到达线la2上使扫地机器人1朝第二出发线ls2旋转。
264.在第一方向转换步骤s332中,可以使扫地机器人1旋转规定的第二方向转换角度θ2。
265.此时,第二方向转换角度θ2可以是135度以上且180度以下,但不限于此,可以包括能够使第一前进行驶步骤s331中扫地机器人1清扫地板面b的区域和后述的第二前进行驶步骤s333中扫地机器人1清扫地板面b的区域彼此重叠的各种角度。
266.另一方面,扫地机器人1在第一区域行驶步骤s310结束的地点开始行驶的情况下,第二区域行驶步骤s330的第一方向转换步骤s332中扫地机器人1旋转的方向可以是与第一区域行驶步骤s310的第一方向转换步骤s312中扫地机器人1旋转的方向相反的方向。
267.在第二前进行驶步骤s333中,控制部110可以使扫地机器人1从第一到达线la2行驶至第二出发线ls2。具体而言,在第二前进行驶步骤s333中,扫地机器人1可以从规定第二到达线la2上的一地点出发并前进行驶至规定的第二出发线ls2上的一地点。
268.此时,第二前进行驶步骤s333中扫地机器人1行驶到达的第二出发线ls2上的地点可以与第一前进行驶步骤s331中扫地机器人1出发的第二出发线ls2上的地点不同。
269.通过这种构成,第二前进行驶步骤s333中扫地机器人1行驶的同时清扫的区域可以与第一前进行驶步骤s331中扫地机器人1行驶的同时清扫的区域部分重叠。因此,扫地机器人1可以仔细地反复清扫清扫区域a。
270.在第二前进行驶步骤s333中,控制部110可以根据由位移传感器126感测到的距第二到达线la2的距离,停止扫地机器人1的行驶。
271.另一方面,在第二前进行驶步骤s333中,若扫地机器人1在行驶期间感测到障碍物o,则可以进入第二方向转换步骤s334。
272.在第二方向转换步骤s334中,控制部110在第二前进行驶步骤s333之后,可以在第二出发线ls2上使扫地机器人1朝第二到达线la2旋转。
273.第一方向转换步骤s332中的扫地机器人1的旋转角度和第二方向转换步骤s334中的扫地机器人1的旋转角度可以相同,但第一方向转换步骤s332中的扫地机器人1的旋转方
向和第二方向转换步骤s334中的扫地机器人1的旋转方向可以彼此相反。
274.即,在第二方向转换步骤s334中,控制部110以扫地机器人1的本体50的正面51所朝向的方向为基准,可以使扫地机器人1的本体50旋转预设的第二方向转换角度θ2。
275.另外,在扫地机器人1从第一区域行驶步骤s310结束的地点开始行驶的情况下,第二区域行驶步骤s330的第二方向转换步骤s334中扫地机器人1旋转的方向可以是与第一区域行驶步骤s310的第二方向转换步骤s314中扫地机器人1旋转的方向相反的方向。
276.另一方面,在第二方向转换步骤s334中,扫地机器人1旋转的位置可以是第一划分区域a1的内部。即,第二方向转换步骤s334中扫地机器人1的第一抹布30和第二抹布40清扫地板面b的区域可以与第一区域行驶步骤s310中扫地机器人1清扫地板面b的区域重叠。
277.通过这种构成,对于地板面b的特定区域,第一划分区域a1和第二划分区域a2可以重叠,扫地机器人1可以对其进行反复清扫。因此,控制部110将污染严重的部分设定为第一划分区域a1和第二划分区域a2重叠的区域,从而具有在污染严重的地板面反复行驶的同时能够仔细地清扫的效果。
278.另一方面,若判断为扫地机器人1未到达第二连接线lc2,则控制部110可以在第二方向转换步骤s334之后反复执行第二区域行驶步骤s330。即,在扫地机器人1未到达第二连接线lc2的情况下,扫地机器人1可以依次反复执行第一前进行驶步骤s331、第一方向转换步骤s332、第二前进行驶步骤s333以及第二方向转换步骤s334。
279.另一方面,在本发明一实施例的扫地机器人的控制方法中,在扫地机器人1到达第二连接线lc2的情况下,扫地机器人1可以在执行第一前进行驶步骤s331之后结束第二区域行驶步骤s330。
280.具体而言,控制部110根据由传感器部120感测到的距第二连接线lc2的距离,可以判断扫地机器人1是否到达第二连接线lc2。
281.例如,在第二前进行驶步骤s333或第二方向转换步骤s334中,控制部110可以通过感测扫地机器人1的坐标来判断扫地机器人1是否到达第二连接线lc2。或者,在第二方向转换步骤s334中,控制部110通过传感器部120感测扫地机器人1与包括壁面等在内的障碍物之间的距离,在扫地机器人1与障碍物之间的距离为规定距离范围以内的情况下,可以判断为扫地机器人1已到达第二连接线lc2。或者,在第二前进行驶步骤s333中,在通过传感器部120感测到扫地机器人1与障碍物发生碰撞的情况下,控制部110可以判断为扫地机器人1已到达第二连接线lc2。
282.并且,若判断为扫地机器人1到达第二连接线lc2,则控制部110可以使扫地机器人1在执行第一前进行驶步骤s331之后在第二到达线la2上停止。
283.另一方面,在本发明的扫地机器人的控制方法中,以行驶步骤s300包括第一区域行驶步骤s310和第二区域行驶步骤s330的情形为基准进行了说明,但不限于此,根据实施例,还可以包括第三区域行驶步骤s350、第四区域行驶步骤s370等。
284.此时,在第三区域行驶步骤s350中,扫地机器人1可以在与第一划分区域a1或第二划分区域a2重叠至少一部分的第三划分区域a3行驶。
285.另外,在第四区域行驶步骤s370中,扫地机器人1可以在与第一划分区域a1或第二划分区域a2或第三划分区域a3重叠至少一部分的第四划分区域a4行驶。
286.另一方面,在第三区域行驶步骤s350和/或第四区域行驶步骤s370中,可以援用第
二区域行驶步骤s330中的过程。
287.通过这种构成,即使清扫区域a具有复杂的平面形状,扫地机器人1也可以设定复数个划分区域并仔细地清扫,即使在清扫区域a内存在复数个污染严重的区域,也可以设定为使划分区域与该区域重叠,从而能够仔细地反复清扫。
288.另一方面,若所述清扫区域的行驶和/或清扫结束,则控制部110可以使扫地机器人1移动至预设的位置。例如,若行驶步骤s300结束,则控制部110可以控制为,使扫地机器人1移动至扫地机器人用充电站(未图示)。
289.本发明一实施例的扫地机器人的控制方法的效果如下。
290.根据本发明一实施例的扫地机器人的控制方法,在区域设定步骤s100中,将清扫区域a分成复数个划分区域a1、a2、a3、...an,复数个划分区域a1、a2、a3、...an的至少一部分彼此重叠。
291.并且,在行驶步骤s300中,扫地机器人1在复数个划分区域a1、a2、a3、...an依次行驶。
292.因此,根据本发明,具有在对清扫区域a的所有范围执行整体清扫的同时能够对复数个划分区域a1、a2、a3、...an彼此重叠的特定区域执行反复清扫的效果。
293.另外,区域设定步骤s100中设定为对于污染程度高的位置,使复数个划分区域a1、a2、a3、...an彼此重叠,行驶步骤s300中控制为在污染严重的位置重叠行驶,从而具有能够仔细地清扫污染严重的地板面的效果。
294.另外,在矩形形状的划分区域a1、a2、a3、...an行驶的同时清扫地板面的行驶步骤s300中,从矩形的一侧边角开始行驶并行驶至其对角线上的边角,因此具有通过最优化扫地机器人1的移动路线来缩短清扫整个清扫区域a和反复清扫污染度高的部分所需的时间的效果。
295.另一方面,图16公开了用于说明本发明另一实施例的扫地机器人的控制方法中扫地机器人1行驶和旋转的过程的图。
296.以下,参照图10和图16,说明本发明另一实施例的扫地机器人的控制方法。
297.另一方面,为了避免重复说明,除本实施例中特别说明的内容之外,可以援用本发明一实施例的扫地机器人的控制方法的内容。
298.在本实施例中,第一区域行驶步骤s310可以包括第一前进行驶步骤s311、第一方向转换步骤s312、第二前进行驶步骤s313、第二方向转换步骤s314、第三前进行驶步骤s315以及第三方向转换步骤s316。
299.在第一前进行驶步骤s311中,控制部110可以使扫地机器人1从第一出发线ls1行驶至第一到达线la1。
300.并且,在第一方向转换步骤s312中,控制部110可以使扫地机器人1在第一到达线la1上旋转180度。
301.在第二前进行驶步骤s313中,控制部110可以使扫地机器人1从第一到达线la1行驶至第一出发线ls1。此时,第二前进行驶步骤s313中扫地机器人1行驶到达的第一出发线ls1上的地点与第一前进行驶步骤s311中扫地机器人1出发的第一出发线ls1上的地点相同。
302.通过这种构成,第二前进行驶步骤s313中扫地机器人1行驶的同时清扫的区域可
以与第一前进行驶步骤s311中扫地机器人1行驶的同时清扫的区域重叠。因此,扫地机器人1可以仔细地反复清扫清扫区域a。
303.在第二方向转换步骤s314中,控制部110在第二前进行驶步骤s313之后,可以在第一出发线ls1上使扫地机器人1旋转90度。此时,扫地机器人1的旋转方向可以是远离第一区域行驶步骤s310开始时扫地机器人1所处的第一连接线lc1的方向。
304.在第三前进行驶步骤s315中,控制部110可以使扫地机器人1直线移动规定距离。例如,在将扫地机器人1的直径称为r时,在第三前进行驶步骤s315中,控制部110可以使扫地机器人1直线移动0.5r以上且r以下的距离。通过这种构成,可以反复仔细地清扫清扫区域a。
305.在第三方向转换步骤s316中,控制部110可以在第一出发线ls1上使扫地机器人1旋转90度。此时,扫地机器人1的旋转方向与第二方向转换步骤s314中的扫地机器人1的旋转方向相同。因此,在第三方向转换步骤s316之后,本体50的正面51朝向第一到达线la1。
306.另一方面,若判断为扫地机器人1未到达第一连接线lc1,则控制部110可以在第三方向转换步骤s316之后反复执行第一区域行驶步骤s310。即,在扫地机器人1未到达第一连接线lc1的情况下,扫地机器人1可以依次反复执行第一前进行驶步骤s311、第一方向转换步骤s312、第二前进行驶步骤s313、第二方向转换步骤s314、第三前进行驶步骤s315以及第三方向转换步骤s316。
307.另一方面,在本发明一实施例的扫地机器人的控制方法中,在扫地机器人1到达第一连接线lc1的情况下,扫地机器人1在执行第一前进行驶步骤s311之后结束第一区域行驶步骤s310,可以进入第二区域行驶步骤s330。
308.因此,根据本实施例,扫地机器人1可以在清扫区域a均匀地反复行驶,因此具有能够对清扫区域a进行仔细地清扫的效果。
309.另一方面,图17a和图17b公开了用于说明本发明又一实施例的扫地机器人的控制方法中扫地机器人1开始第二区域行驶步骤s330的过程的图。
310.以下,参照图10、图17a以及图17b,说明本发明又一实施例的扫地机器人的控制方法。
311.另一方面,为了避免重复说明,除本实施例中特别说明的内容之外,可以援用本发明一实施例的扫地机器人的控制方法的内容。
312.在本实施例中,在第一区域行驶步骤s310结束之后,在第二区域行驶步骤s330之前,还可以包括使扫地机器人1移动至第二出发地点ps2的出发点变更步骤s320。
313.此时,在本实施例中,第二出发地点ps2可以是第一区域行驶步骤s310中的第一方向转换地点pt1。即,第二出发地点ps2存在于第一到达线la1上,但位于与第一到达地点pa1彼此相反的方向。
314.因此,在出发点变更步骤s320中,控制部110在第一到达地点pa1上使扫地机器人1旋转90度,从而可以使本体50的正面51面向第二出发地点ps2(s321)。
315.然后,控制部110可以使扫地机器人1从第一到达地点pa1出发并直线移动第二出发地点ps2(s322)。
316.然后,控制部110可以使扫地机器人1旋转90度,从而可以使本体50的正面面向第二到达线la2(s323)。
317.通过这种过程,扫地机器人1可以在划分区域a1、a2、...an彼此重叠的区域ao再行驶一次。因此,与本发明的一实施例相比,本实施例对污染严重的区域进行再一次清扫,从而能够提高需要反复清扫的部分的清扫效果。
318.与此同时,保持了从矩形的一侧边角开始行驶并行驶至其对角线上的边角的优点,因此具有通过最优化扫地机器人1的移动路线来缩短清扫整个清扫区域a和反复清扫污染度高的部分所需的时间的效果。
319.以上,通过本发明的具体实施例进行了详细说明,但其仅用于具体说明本发明,本发明不限于此,显然本发明可以被本发明所属技术领域的普通技术人员进行变形或改进。
320.本发明的简单的变形或变更均属于本发明的范围,本发明的具体保护范围将通过所附的权利要求书的范围而变得更加明确。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。