一种基于stm的篮球训练辅助机器人
技术领域
1.本实用新型涉及篮球训练辅助器械技术领域,特别是一种基于stm的篮球训练辅助机器人。
背景技术:
2.近年来,随着社会各个方面技术的进步,机器人在人们的日常生活中起到了越来越重要的作用。体育训练是一种高强度高灵敏度的活动,在体育训练中引入训练辅助机器人也显得尤为必要。
3.现有的一些篮球类的训练机器人大多集中于重复性、机械性的训练,无法反馈用户的一些信息,人机交互性不强,例如专利公开号为cn104474693a的机器人篮球训练器材;还有的一些篮球训练机器人是固定于训练场的,或仅能实现发球或捡球等较少的功能,无法实现用户更多场所的选择权。因此,设计交互性强、多情境适应的篮球训练机器人是一直需要改善的问题。
技术实现要素:
4.本实用新型的目的是克服现有技术的上述不足而提供一种基于stm的篮球训练辅助机器人。
5.本实用新型的技术方案是:一种基于stm的篮球训练辅助机器人,包括全向底盘模块、投射模块、接球模块、视觉识别模块、stm主控模块和供电模块。
6.所述全向底盘模块包括矩形底座、四个全向轮、四个底盘电机、平行滑轨、转动盘和圆弧滑轨,矩形底座的四个角内侧分别设有第一横杆和第二横杆,四个全向轮分别安装在矩形底座的第一横杆外侧上;四个底盘电机固定在矩形底座四个角第一横杆和第二横杆之间;一对平行滑轨的两端分别固定于矩形底座其中相对应的第二横杆之间;转动盘的底部固定于平行滑轨中间,圆弧滑轨底部固定于平行滑轨的一侧末端。
7.所述投射模块包括投射箱框架、滑轨支座、摩擦轮支座、舵机、挡板、压力传感器、滑轨、摩擦轮和摩擦轮驱动电机。
8.投射箱框架包括长方体支架、上表面的盖板和下表面的底板,盖板上设有孔,滑轨支座位于底板上;摩擦轮支座包括两个分别位于盖板和底板上的固定座和连接两个固定座的固定架;舵机位于盖板底面且靠近孔处,挡板与舵机的输出端连接且位于孔的正下方,压力传感器设于挡板上;滑轨设于滑轨支座上,滑轨的一端固定于盖板的底面上且轨道位于挡板的正下方,另一端与固定架固定连接,两个摩擦轮分别安装于固定座上,两个摩擦轮驱动电机位于固定架上,其输出轴分别与摩擦轮连接。
9.所述接球模块包括拦球网、导轨和支架,拦球网呈圆弧形设置,包括固定不动的前网和可移动的后网,导轨呈漏斗状,导轨的上开口与前网固定连接;支架分别位于前网和后网的两侧边。
10.所述视觉识别模块包括图像识别组件、角度和距离计算组件;固定安装于投射箱
框架的最前端或侧边。
11.所述投射模块的底板固定于全向底盘模块的转动盘上,接球模块的支架固定于全向底盘模块的圆弧滑轨中,接球模块的导轨的下开口位于投射模块的孔上方,视觉识别模块固定于投射模块的投射箱框架上;stm主控模块分别与全向底盘模块、投射模块、接球模块和视觉识别模块电连接;供电模块用于为机器人提供电源供应。
12.本实用新型进一步的技术方案是:所述四个全向轮平台质量分布均匀,且质心位置位于矩形中心处。
13.本实用新型再进一步的技术方案是:所述圆弧滑轨上具有两个滑道,圆弧的角度大于等于180度。
14.本实用新型更进一步的技术方案是:所述盖板上的孔直径、滑轨的宽度、固定架之间的距离略大于篮球直径,两个摩擦轮之间的距离略小于篮球的直径。
15.本实用新型更进一步的技术方案是:所述挡板在舵机的带动下能够转动;位于下固定座的摩擦轮与滑轨的末端相切。
16.本实用新型更进一步的技术方案是:所述导轨的上开口半径与圆弧形拦球网的圆弧半径相等
17.本实用新型更进一步的技术方案是:所述图像识别组件包括摄像头,用于对训练人员的数据进行采集和动作进行跟踪,角度和距离计算组件用于根据图像识别组件采集的运动数据识别角度和距离
18.本实用新型更进一步的技术方案是:所述stm主控模块与底盘电机、转动盘、舵机、压力传感器、摩擦轮驱动电机通过无线或者有线电连接;
19.本实用新型更进一步的技术方案是:所述stm主控模块采用stm32f407系列芯片,采用freertos实时操作系统。
20.本实用新型与现有技术相比具有如下特点:
21.1、本实用新型能够实现机器人的水平方向的全向运动,通过无线或有线对机器人进行操控,提高了篮球训练机器人的灵活性。
22.2、本实用新型能够通过视觉识别模块识别人体手势,并反馈回人体坐标,根据返回信息将球以一定的角度和力度射出,实现良好的人机交互,提高球员训练的兴趣。
23.3、本实用新型的能够实现多种模式的训练,锻炼其跑位意识,提升其面对防守时心理素质,有效弥补无人培训或者训练不足,提高训练人员的水平。
24.以下结合附图和具体实施方式对本实用新型的详细结构作进一步描述。
附图说明
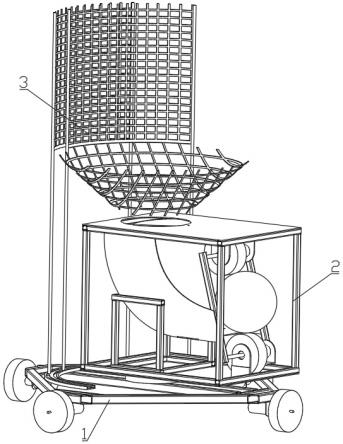
25.图1为本实用新型的结构示意图;
26.图2为全向底盘模块的结构示意图;
27.图3为投射模块的结构示意图;
28.图4为投射模块的前视图;
29.图5为投射模块的左视图(右视图);
30.图6为接球模块与全向底盘模块的连接示意图。
具体实施方式
31.实施例一,如图1-6所示,一种基于stm的篮球训练辅助机器人,全向底盘模块1、投射模块2、接球模块3、视觉识别模块、stm主控模块和供电模块。
32.如图2所示,所述全向底盘模块包括矩形底座1-1、四个全向轮1-2、四个底盘电机1-3、平行滑轨1-4、转动盘1-5和圆弧滑轨1-6,矩形底座1-1的四个角内侧分别设有第一横杆1-1-1和第二横杆1-1-2,四个全向轮1-2分别安装在矩形底座1-1的第一横杆1-1-1外侧上,四个全向轮1-2平台质量分布均匀,且质心位置位于矩形中心处,以保证四个全向轮1-2在地面接触点受到的支撑力相同,且设全向轮1-2在平台运动过程中,不会悬空而发生空转现象。四个底盘电机1-3固定在矩形底座1-1四个角第一横杆1-1-1和第二横杆1-1-2之间。一对平行滑轨1-4的两端分别固定于矩形底座1-1其中相对应的第二横杆1-1-2之间。转动盘1-5的底部固定于平行滑轨1-4中间,能够在平行滑轨1-4上自由转动。圆弧滑轨1-6上具有两个滑道,其底部固定于平行滑轨1-4的一侧末端,圆弧的角度大于等于180度。
33.如图3-5所示,所述投射模块2包括投射箱框架2-1、滑轨支座2-2、摩擦轮支座2-3、舵机2-4、挡板2-5、压力传感器2-6、滑轨2-7、摩擦轮2-8和摩擦轮驱动电机2-9。
34.投射箱框架2-1包括长方体支架2-1-1、上表面的盖板2-1-2和下表面的底板2-1-3,盖板2-1-2上设有直径略大于篮球的孔2-1-4,使得篮球能够顺畅地从孔2-1-4中通过。滑轨支座2-2位于底板2-1-3上。摩擦轮支座2-3包括两个分别位于盖板2-1-2和底板2-1-3上的固定座2-3-1和连接两个固定座2-3-1的固定架2-3-2。舵机2-4位于盖板2-1-2底面且靠近孔2-1-4处,挡板2-5与舵机2-4的输出端连接且位于孔2-1-4的正下方,挡板2-5在舵机2-4的带动下能够转动一定角度,使得其由挡住孔2-1-4移动到不挡住孔2-1-4的位置,压力传感器2-6设于挡板2-5上。滑轨2-7设于滑轨支座2-2上由滑轨支座2-2进行支撑,滑轨2-7的一端固定于盖板2-1-2的底面上且轨道位于挡板2-5的正下方,另一端与固定架2-3-2固定连接,滑轨2-7呈圆弧状,使得篮球在滑轨2-7上端运动到下端时,在重力作用下具有一定的初速度。两个摩擦轮2-8分别安装于固定座2-3-1上且位于下固定座2-3-1的摩擦轮2-8与滑轨2-7的末端相切。设置滑轨2-7的宽度、固定架2-3-2之间的距离略大于篮球的直径使得篮球在运动过程中不至于太偏,两个摩擦轮2-8之间的距离略小于篮球的直径,使篮球在从滑轨2-7运动到摩擦轮2-8之间时受到挤压和摩擦,以便更好的发射出去。两个摩擦轮驱动电机2-9位于固定架2-3-2上,其输出轴分别与摩擦轮2-8连接,带动摩擦轮2-8转动。
35.如图6所示,所述接球模块3包括拦球网3-1、导轨3-2和支架3-3。拦球网3-1呈圆弧形设置,包括固定不动的前网3-1-1和可移动的后网3-1-2,手动调整可移动的后网3-1-2与前网3-1-1的位置并固定,保证篮球能够落到拦球网3-1上。导轨3-2呈漏斗状,导轨3-2的上开口与前网3-1-3固定连接,导轨3-2的上开口半径与圆弧形拦球网3-1的圆弧半径相等。支架3-3分别位于前网3-1-1和后网3-2-2的两侧边,用于固定拦球网3-1和导轨3-2。接球模块3通过固定不动的前网3-1-1和可移动的后网3-1-2共同形成一个弧状的网纱窗,不仅起到了相应的缓冲作用,且能够改变不同方位的传球,同时与拦球网3-1连接的导轨3-2能保证篮球能够被限定沿着导轨3-2运动。
36.所述视觉识别模块(图中未示出)包括图像识别组件、角度和距离计算组件。图像识别组件包括摄像头,用于对训练人员的数据进行采集和动作进行跟踪,能够根据实际需要固定安装于投射箱框架2-1的最前端或侧边,摄像头位于投射箱框架2-1的最前端,能观
察到正面大部分角度的图像,同时摄像头随着投射箱框架2-1运动,保证了其对训练人员的追踪;也可以将摄像头固定安装于投射箱框架2-1的侧边,以在运动过程中保证摄像头和训练人员的安全性。角度和距离计算组件用于根据图像识别组件采集的运动数据,采用opencv程序识别训练人员的角度和距离。由于opencv官方提供的模型能够很好地实现对图片、视频进行人体的识别以及动作进行识别,此处不做赘述。
37.所述投射模块2的底板2-1-3固定于全向底盘模块1的转动盘1-5上,接球模块3的支架3-3固定于全向底盘模块1的圆弧滑轨1-6中,接球模块3的导轨3-2的下开口位于投射模块2的孔2-1-4上方,视觉识别模块固定于投射模块2的投射箱框架2-1上;stm主控模块(图中未示出)分别与全向底盘模块1、投射模块2、接球模块3和视觉识别模块电连接。具体地,stm主控模块与底盘电机1-3、转动盘1-5、舵机2-4、压力传感器2-6、摩擦轮驱动电机2-9通过无线或者有线电连接,采用stm32f407高性能m4内核芯片,来作为整个机器人的中枢控制系统,具有更快的模数转换速度,更高的运行频率,更低的功耗,完全能满足对于速度、精度的要求,且为了满足多任务的同时运行,采用freertos实时操作系统来避免裸机程序的冗杂和不定向。
38.所述供电模块(图中未示出)用于为机器人提供电源供应。
39.简述该一种基于stm的篮球训练辅助机器人的工作过程:该辅助机器人能够实现三种模式训练篮球训练人员技能。
40.第一种则是传切模式,训练的是训练人员长距离传球的篮球技能,增强训练人员在比赛与队友之间配合意识。训练人员将篮球投至机器人接球模块3,视觉识别模块采集训练人员的状态,计算出其角度和距离发送至stm主控模块,同时,篮球在拦球网3-1、导轨3-2的作用下落入孔2-1-4中,压力传感器2-6感知有球进入,发送信号至stm主控模块,stm主控模块在收到有球进入和训练人员要球的手势后控制舵机2-4移开挡板2-5、控制摩擦轮电机2-9,篮球在滑轨2-7上运动至末端在摩擦轮2-8的作用下将篮球以一定速度把球传回给训练人员。
41.第二种则是传球上篮模式,训练篮球训练人员行进间传接球技能及其伸手要球意识。与第一种方式类似,不同在于当压力传感器没有感知到篮球时,stm主控模块控制底盘电机1-3使得机器人快速移动并在其路线上超过训练人员,使训练人员更好的投球进入机器人的接球装置,而这能够进一步考验训练人员传球水平,以此经过两三次传接球,训练人员最终通过上篮完成传球上篮。最后机器人根据预置命令回到初始位置等待下一次传接球上篮训练。
42.第三种则是防守步伐的训练以及行进间变向运球模式,机器人充当移动的进攻者或者是障碍物的角色,训练训练人员带球过人的技巧。与第一种方式类似,不同在于在充当进攻者时,能够训练训练人员的防守步伐;在充当障碍物时,能够在训练人员前进的方向进行阻挡,这不仅能够训练训练人员行进间的变向运球,也能够达到与机器人保持一定的距离随时进行带球过人的目的,同时这种方式还能够克服训练人员在前面有障碍或是一点干扰而不敢出手投球或带球突破的心理。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
