1.本实用新型涉及餐饮机器人技术领域,具体涉及一种带有自动收线和检测充电线位置的餐饮机器人底盘控制系统。
背景技术:
2.随着科技的进步和发展,机器人的运用越来越广泛,现有机器人的技术已经非常发达,智能化程度很高,各种各样具有先进技术的机器人在我们的生活和工作中发挥着重要作用。
3.智能点餐机器人是众多机器人种类中的一种,近几年来智能点餐机器人逐渐走进大家视野,许多餐馆引进智能点餐机器人,可以体现餐厅智能化特色,同时也节省人力、便于管理;中国专利cn 209912013 u,公开了一种具有智能识别菜品系统的餐桌智媒体机器人,该机器人包括:有头部旋转机械装置、语音识别系统、人脸识别系统、超声波人体感应器、服务员呼叫装置、立体音响、防故障警报装置、逻辑主板、动作控制板、充电板、摄像头、菜品识别系统、内部数据存储器、图像处理系统、tft屏幕和防水机构,但是该餐桌智媒体机器人的充电板上的数据线无法实现智能控制,现亟需一种能够实现自动收线和检测充电线位置的餐饮机器人底盘控制系统。
技术实现要素:
4.鉴于上述问题,本实用新型的目的是提供一种带有自动收线和检测充电线位置的机器人底盘控制系统,用于检测充电线位置及自动收取充电线,以克服上述现有技术的不足。
5.本实用新型提供的带有自动收线和检测充电线位置的机器人底盘控制系统,包括:智能机器人本体、安装在智能机器人本体上的头部旋转机械装置、语音识别系统、人脸识别系统、超声波人体感应器、服务员呼叫装置、立体音响、防故障警报装置、逻辑主板、动作控制板、充电板、摄像头、菜品识别系统、内部数据存储器、图像处理系统、tft屏幕和防水机构,所做的改进是,在逻辑主板上增设有用于检测充电线位置的充电控制模块和用于控制充电线收线电机的电机控制模块,所述充电控制模块和电机控制模块接入至20v 电源;
6.其中,所述电机控制模块用于控制智能机器人本体底座上的充电线收线电机,所述电机控制模块包括:电机降压电源模块、电流检测模块、开关sw1、开关sw2、第一收线电机和第二收线电机,电机降压电源模块分别通过开关sw1、开关sw2与第一收线电机和第二收线电机电连接,所述第一收线电机和第二收线电机通过电流检测模块与电机降压电源模块电连接,所述电机降压电源模块用于将20v电源降压为12v电源,所述开关sw1、开关sw2分别控制第一收线电机和第二收线电机的启停,所述电流检测模块用于检测第一收线电机和第二收线电机的电流进而判断电机是否已经完全收回;
7.其中,所述充电控制模块由两组独立的充电控制电路构成,所述充电控制电路包括:信道降压电源模块、电感fb、充电器控制模块、串行通讯总线i
2 c、usb数据接口,信道降
压电源模块分别与充电器控制模块和usb数据接口电连接,所述充电器控制模块分别与串行通讯总线i
2 c、电感fb、以及usb数据接口电连接,所述电感fb与信道降压电源模块电连接,所述信道降压电源模块用于将20v电源降压输出,输出电压受来自充电器控制模块的反馈电感fb控制,所述充电器控制模块用于与被充电设备进行快充协议握手,依据协议规范调整信道降压电源模块的输出电压,并且受控于串行通讯总线i
2 c的控制,所述信道降压电源模块的降压输出至充电器控制模块和usb数据接口。
8.作为本实用新型的优选,两组所述充电控制电路的信道降压电源模块并联在20v电源上。
9.本实用新型的优点及积极效果是:
10.1、本实用新型的在逻辑主板上增设有用于检测充电线位置的充电控制模块和用于控制充电线收线电机的电机控制模块,使得机器人的充电线在自动回收的基础上实现其智能检测充电位置,结合机器人的语音呼叫装置,可进一步实现机器人硬件的智能控制。
11.2、本实用新型的充电控制模块具有多路控制,可满足机器人底盘上充电线的精准控制,并且通过串行通讯总线i
2 c与机器人的逻辑主板进行对接,再配合充电器控制模块可将被充电设备的相应信息输送至逻辑主板进行智能控制。
12.3、本实用新型的电机控制模块采用简单的电流检测电路即可判断电机是否已经完全收回充电线,并可将检测信息传输给逻辑主板进行检测,另外,控制电机启停的开关sw1、开关sw2可受机器人逻辑主板的电平信号控制,结合机器人的超声波人体感应器,可实现充电的智能控制。
附图说明
13.通过参考以下结合附图的说明,并且随着对本实用新型的更全面理解,本实用新型的其它目的及结果将更加明白及易于理解。在附图中:
14.图1为现有技术原理图。
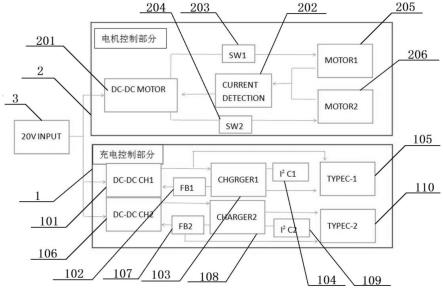
15.图2本实用新型实施例中的原理图。
16.图3本实用新型实施例中的电机控制模块电路图。
17.图4本实用新型实施例中的充电控制模块电路图。
18.附图说明:充电控制模块1、第一信道降压电源模块101、第一电感102、第一充电器控制模块103、第一串行通讯总线104、第一usb数据接口105、第二信道降压电源模块106、第二电感107、第二充电器控制模块108、第二串行通讯总线109、第二usb 数据接口110、电机控制模块2、电机降压电源模块201、电流检测模202、第一开关 203、第二开关204、第一收线电机205、第二收线电机206、20v电源3。
具体实施方式
19.在下面的描述中,出于说明的目的,为了提供对一个或多个实施例的全面理解,阐述了许多具体细节。然而,很明显,也可以在没有这些具体细节的情况下实现这些实施例。在其它例子中,为了便于描述一个或多个实施例,公知的结构和设备以方框图的形式示出。
20.图2-4示出了根据本实用新型实施例的整体结构示意图。
21.如图2-4所示,本实用新型实施例提供的带有自动收线和检测充电线位置的机器
人底盘控制系统,包括:智能机器人本体、安装在智能机器人本体上的头部旋转机械装置、语音识别系统、人脸识别系统、超声波人体感应器、服务员呼叫装置、立体音响、防故障警报装置、逻辑主板、动作控制板、充电板、摄像头、菜品识别系统、内部数据存储器、图像处理系统、tft屏幕和防水机构,在逻辑主板上增设有用于检测充电线位置的充电控制模块1和用于控制充电线收线电机的电机控制模块2,所述充电控制模块1和电机控制模块2接入至20v电源3。
22.本实施例中的电机控制模块2用于控制智能机器人本体底座上的两个充电线收线电机,其中,两个充电线收线电机分别通过卷线器对充电线进行收放。所述电机控制模块2 包括:电机降压电源模块(dc-dc motor)201、电流检测模块(current detection)202、第一开关(sw1)203、第二开关(sw2)204、第一收线电机(motor1)205和第二收线电机(motor2)206,电机降压电源模块201分别通过第一开关203、第二开关204与第一收线电机205和第二收线电机206电连接,所述第一收线电机205和第二收线电机206通过电流检测模块202与电机降压电源模块201电连接,电机降压电源模块201用于将20v电源降压为12v电源,所述第一开关203、第二开关204分别控制第一收线电机205、第二收线电机206的启停,所述20v电源输入经“dc-dc motor”降压为12v通过“sw1”和“sw2”的控制分别控制收线电机“motor1”和“motor2”的启停,“sw1”和“sw2”受上位机的电平信号控制,所述电流检测模块202用于检测第一收线电机205和第二收线电机206的电流进而判断电机是否已经完全收回;“current detection”将发送电流超过阈值信号到上位机。
23.本实施例中充电控制模块1由两组独立的充电控制电路构成,两组所述充电控制电路的信道降压电源模块并联在20v电源3上。第一充电控制电路包括:第一信道降压电源模块(dc-dc ch1)101、第一电感(fb1)102、第一充电器控制模块(charger)103、第一串行通讯总线(i
2 c1)104、第一usb数据接口(typec-1)105,第一信道降压电源模块101分别与第一充电器控制模块103和第一usb数据接口105电连接,所述第一充电器控制模块103分别与第一串行通讯总线i
2 c104、第一电感fb102、以及第一usb数据接口电连接,所述第一电感(fb1)102与第一信道降压电源模块101电连接,所述第一信道降压电源模块101用于将20v电源降压输出,输出电压受来自第一充电器控制模块103的反馈第一电感(fb1)102控制,所述第一充电器控制模块103用于与被充电设备进行快充协议握手,依据协议规范调整第一信道降压电源模块101的输出电压,并且受控于第一串行通讯总线i
2 c104的控制,第一串行通讯总线i
2 c104受控于上位机,所述第一信道降压电源模块101的降压输出至第一充电器控制模块103和第一usb数据接口105。第二充电控制电路包括:第二信道降压电源模块(dc-dc ch1)106、第二电感(fb1)107、第二充电器控制模块(charger)108、第二串行通讯总线(i
2 c1)109、第二usb数据接口(typec-2) 110,第二信道降压电源模块106分别与第二充电器控制模块108和第二usb数据接口110 电连接,所述第二充电器控制模块108分别与第二串行通讯总线i
2 c109、第二电感fb107、以及第二usb数据接口110电连接,所述第二电感(fb1)107与第二信道降压电源模块 106电连接,所述第二信道降压电源模块106用于将20v电源降压输出,输出电压受来自第二充电器控制模块108的反馈第二电感(fb1)107控制,所述第二充电器控制模块108 用于与被充电设备进行快充协议握手,依据协议规范调整第二信道降压电源模块106的输出电压,并且受控于第二串行通讯总线i
2 c109的控制,第二串行通讯总线i
2 c109也受控于上位机,所述第二信道降压电源模块106的降压输出至第二充
电器控制模块108和第二 usb数据接口110。
24.如图3所示的电机降压电源模块201的u3-tcs4530引脚说明如下:
[0025][0026][0027]
本实施例中电流检测模202的u32-jrc4558引脚说明如下:
[0028][0029]
如图3所示的电路通过jrc4588双运放和外围电路构成差分放大器用来检测和放大电机检流电阻两端的压差进而反应电机的工作电流,并且将电流值变送至上位机。
[0030]
如图4所示的第一信道降压电源模块101的u7-tcs4530引脚说明如下:
[0031][0032]
如图4所示的第一充电器控制模块103的u6-rk837引脚说明如下:
[0033][0034][0035]
工作原理:电机控制部分中20v电源3输入经第一信道降压电源模块101降压为12v 通过第一开关203和第二开关204的控制分别控制第一收线电机205、第二收线电机206 的启停,第一开关203和第二开关204受上位机的电平信号控制,并且通过电流检测模202 检测电机电流进而判断电机是否已经完全收回,并且电流检测模202可将发送电流超过阈值信号到上位机。充电控制部分由两组相对独立的电路构成。两组充电控制电路的信道降压电源模块并联在20v电源3上。其中一条电路中,第一信道降压电源模块101将20v电源3的20v输入降压输出,输出电压受来自第一充电器控制模块103的反馈第一电感102 控制,第一信道降压电源模块101的输出一路去往第一充电器控制模块103对控制单元供电,另一路
去往第一usb数据接口105,第一充电器控制模块103负责与被充电设备进行快充协议握手,依据协议规范调整第一信道降压电源模块101的输出电压,并且受控于来自上位机的第一串行通讯总线104。另一条电路与第一条电路的原理相同。
[0036]
以上,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
