图像解码方法和图像编码方法
1.本技术是申请日为2018年02月27日,申请号为“201880023458.5”,标题为“用于对用于并行处理的运动信息进行处理的图像处理方法、用于使用该图像处理方法进行解码和编码的方法、以及用于该方法的设备”的发明专利申请的分案申请。
技术领域
2.本发明涉及一种图像处理方法、使用该图像处理方法对图像进行解码和编码的方法、以及用于该方法的设备。更具体地,本发明涉及一种对用于并行处理的运动信息进行处理的图像处理方法、使用该图像处理方法对图像进行解码和编码的方法、以及用于该方法的设备。
背景技术:
3.数字视频技术可以以整体化方式被用于各式各样的数字视频装置,包括例如数字电视、数字直播系统、无线广播系统、个人数字助理(pda)、膝上型或台式计算机、数码相机、数字记录装置、视频游戏装置、视频游戏控制台、移动电话、卫星无线电话等。数字视频装置可实现视频压缩技术(诸如mpeg-2、mpeg-4、或itu-t h.264/mpeg-4、第10部分、高级视频编码(avc)、h.265/高效视频编码(hevc))以更有效地发送和接收数字视频信息。视频压缩技术执行空间预测和时间预测以消除或减少视频序列中固有的冗余。
4.作为这样的图像压缩技术,存在各种技术,诸如用于从当前画面的先前画面或随后画面预测包括在当前画面中的像素值的帧间预测技术、用于使用当前画面中的像素信息预测包括在当前画面中的像素值的帧内预测技术、以及将短码分配给具有高出现频率的值并将长码分配给具有低出现频率的值的熵编码技术,并且图像数据可使用这些图像压缩技术而被有效地压缩,并可被发送或存储。
5.为了根据这些应用经济有效地应对各种分辨率、帧率等,需要具有能够根据应用中所需的性能和功能而容易地被控制的视频解码设备。
6.例如,在图像压缩方法中,画面被分区为均具有预定尺寸的多个块以执行编码。此外,使用用于消除画面之间的冗余的帧间预测技术和帧内预测技术来提高压缩效率。
7.在这种情况下,通过使用帧内预测和帧间预测来产生残差信号。获得残差信号的原因是因为当使用残差信号来执行编码时,数据量小,使得数据压缩率更高,并且预测越好,残差信号的值越小。
8.帧内预测方法通过使用当前块周围的像素来预测当前块的数据。实际值和预测值之间的差被称为残差信号块。在hevc的情况下,由于预测模式的数量从在现有h.264/avc中使用的9种预测模式增加到35种预测模式,因此帧内预测方法在被进一步划分的情况下被执行。
9.在帧间预测方法的情况下,将当前块与邻近画面中的块进行比较以找到最相似的块。这里,被找到的块的位置信息(vx,vy)被称为运动矢量。当前块与通过所述运动矢量预测的预测块之间的像素值的差被称为残差信号块(运动补偿残差块)。
10.以这种方式,尽管帧内预测和帧间预测被进一步划分,使得残差信号的数据量减少,但是用于对视频进行处理的计算量大大增加。
11.具体地,在用于图像编码和解码的画面中确定分区结构的处理的复杂度的增加以及现有的块分区方法导致在流水线执行过程方面存在困难,并且现有的块分区方法和从分区操作产生的块的尺寸可能不适合对高分辨率图像进行编码。
12.例如,在用于帧间预测的运动信息的并行处理中,由于仅可在完成左侧邻近块、上方邻近块和左上邻近块的编码或解码之后对当前块进行处理,因此在实现并行流水线时,需要等待直到用于当前块的在另一流水线中处理的邻近块的块模式和分区尺寸被确定为止,从而存在导致流水线停滞的问题。
13.为了解决这个问题,在hevc中已经提出了对关于任意块尺寸内的一些预测单元的运动信息进行合并的合并方法。然而,在计算任意块中的第一预测单元的运动信息时,出现了需要邻近块的运动信息的同一问题,从而存在编码效率显著降低的问题。
技术实现要素:
14.技术问题
15.已经给出本发明以解决上述问题,并且本发明的目的是提供一种用于对图像进行解码和编码的方法和设备,其中,所述方法和设备通过对高分辨率图像的运动信息预测解码和编码进行并行处理来提高编码效率。
16.解决方案
17.为了解决上述目标,根据本发明的实施例的对运动信息进行解码的方法包括:识别运动信息将被解码的当前块的并行运动信息预测单元索引;获得在从当前块的邻近块排除属于先前索引的并行运动信息预测单元的块之外的剩余块之中的至少一个邻近块的运动信息;并且基于获得的运动信息对针对当前块的运动信息预测解码进行处理。
18.为了解决上述目标,根据本发明的实施例的对运动信息进行的方法包括:识别运动信息将被编码的当前块的并行运动信息预测单元索引;获得在从当前块的邻近块排除属于先前索引的并行运动信息预测单元的块之外的剩余块之中的至少一个邻近块的运动信息;并且基于获得的运动信息对针对当前块的运动信息预测编码进行处理。
19.此外,为了解决上述目标,根据本发明的实施例的方法可被实现为一种用于在计算机上执行所述方法的程序以及一种存储所述程序并可由计算机进行读取的非易失性记录介质。
20.有益效果
21.根据本发明的实施例,可将解码的块顺序地分组为预定并行运动信息预测单元。
22.根据本发明的实施例,在运动信息解码中,可使用从当前块的邻近块排除属于先前并行运动信息预测单元的块之外的剩余块的运动信息来执行运动信息解码。
23.因此,可独立地执行针对每个并行运动信息预测单元的流水线处理,并且可预先阻止流水线停滞,从而提高编码和解码效率。
附图说明
24.图1是示出根据本发明的实施例的图像编码设备的配置的框图。
25.图2至图5是示出将图像分区为块单元并对图像进行处理的方法的第一实施例的示图。
26.图6是示出在图像编码设备中执行帧间预测的方法的实施例的框图。
27.图7是示出根据本发明的实施例的图像解码设备的配置的框图。
28.图8是示出在图像解码设备中执行帧间预测的方法的实施例的框图。
29.图9是示出将图像分区为块单元并对图像进行处理的方法的第二实施例的示图。
30.图10是示出将图像分区为块单元并对图像进行处理的方法的第三实施例的示图。
31.图11是示出使用二叉树结构对编码单元进行分区以构建变换单元的方法的实施例的示图。
32.图12是示出将图像分区为块单元并对图像进行处理的方法的第四实施例的示图。
33.图13至14是示出将图像分区为块单元并对图像进行处理的方法的又一实施例的示图。
34.图15和图16是示出通过执行率失真优化(rdo)来确定变换单元的分区结构的方法的实施例的示图。
35.图17和图18是示出根据本发明的实施例的对用于并行处理的运动信息进行处理的图像处理方法的流程图。
36.图19至图22是示出针对每种情况的根据本发明的实施例的运动信息处理方法的示图。
具体实施方式
37.在下文中,将参照附图详细描述本发明的实施例。在本发明的实施例的以下描述中,当对包含在此的已知功能和配置的详细描述可能使本公开的主题相当不清楚时,将省略对包含在此的已知功能和配置的详细描述。
38.将理解,当元件被称为“连接”或“耦接”到另一元件时,该元件可被直接连接或直接耦接到所述另一元件,但是在两个元件之间还存在其他元件。此外,在本发明中的“包括”特定配置的描述不排除所述配置之外的配置,而是意味着附加配置可被包括在本发明的实践范围内或本发明的技术范围内。
39.术语第一、第二等可被用于描述各种组件,但是所述组件不应被所述术语限制。所述术语仅被用于将一个组件与另一组件区分开的目的。例如,在不脱离本发明的范围的情况下,第一组件可被称为第二组件,并且类似地,第二组件也可被称为第一组件。
40.此外,在本发明的实施例中示出的组成单元被单独地示出以呈现不同的特性功能,并且每个组件不意味着每个组成单元以单独的硬件或一个软件组成单元来配置。也就是说,为了便于说明,每个组成单元被包括在列表中,并且组成单元中的至少两个组成单元可被组合以形成一个组成单元,或者一个组成单元可被划分为多个组成单元以执行每个功能。这种组成单元的集成的实施例和分离的实施例也被包括在本发明的范围内,除非它们脱离本发明的实质。
41.此外,一些组件不是执行必要功能的必要组件,而是仅用于在本发明中提升性能的可选组件。本发明可仅用除了用于性能提升的组件之外的实现本发明的实质所必需的组件来实现,并且包括除了用于性能提升的可选组件之外的必要组件的结构也被包括在本发
明的范围内。
42.图1是示出根据本发明的实施例的图像编码设备的配置的框图。图像编码设备10包括画面分区模块110、变换模块120、量化模块130、扫描模块131、熵编码模块140、帧内预测模块150、帧间预测模块160、反量化模块135、逆变换模块125、后处理模块170、画面存储模块180、减法器190和加法器195。
43.参照图1,画面分区模块110分析输入视频信号并且将画面分区为编码单元,以确定预测模式并确定针对每个编码单元的预测单元尺寸。
44.此外,画面分区模块110根据预测模式(或预测方法)将要被编码的预测单元发送到帧内预测模块150或帧间预测模块160。此外,画面分区模块110将要被编码的预测单元发送到减法器190。
45.这里,图像的画面由多个条带组成,并且条带可被分区为作为画面分区的基本单元的多个编码树单元(ctu)。
46.编码树单元可被分区为作为帧间预测或帧内预测的基本单元的一个或至少两个编码单元(cu)。
47.这里,编码树单元和编码单元的最大尺寸可彼此不同,并且关于所述最大尺寸的信令信息可被发送到解码设备20。这将在后面参照图17被更详细地描述。
48.编码单元(cu)可被分区为作为预测的基本单元的一个或至少两个预测单元(pu)。
49.在这种情况下,编码设备10将作为预测方法的帧间预测和帧内预测中的任意一种确定为针对从分区操作得到的每个编码单元(cu)的预测方法,但是针对每个预测单元(cu),可彼此有所不同地产生预测块。
50.另外,编码单元(cu)可被分区为一个或两个或者更多个变换单元(tu),其中,所述变换单元(tu)是对残差块执行变换的基本单元。
51.在这种情况下,画面分区模块110可以以如上所述的从分区操作得到的块(例如,预测单元(pu)或变换单元(tu))为单位将图像数据发送到减法器190。
52.参照图2,使用四叉树结构将具有256
×
256像素的最大尺寸的编码树单元(ctu)分区为均具有正方形形状的四个编码单元(cu)。
53.可使用四叉树结构对具有正方形形状的所述四个编码单元(cu)中的每一个进行进一步分区。编码单元(cu)的深度具有0到3中的任意一个整数。
54.可根据预测模式将编码单元(cu)分区为一个或至少两个预测单元(pu)。
55.在帧内预测模式的情况下,当编码单元(cu)的尺寸是2n
×
2n时,预测单元(pu)具有图3(a)中所示的2n
×
2n的尺寸或图3(b)中所示的n
×
n的尺寸。
56.另外,在帧间预测模式的情况下,当编码单元(cu)的尺寸是2n
×
2n时,预测单元(pu)具有以下尺寸中的任意一个尺寸:图4(a)中所示的2n
×
2n、图4(b)中所示的2n
×
n、图4(c)中所示的n
×
2n、图4(d)中所示的n
×
n、图4(e)中所示的2n
×
nu、图4(f)中所示的2n
×
nd、图4(g)中所示的nl
×
2n以及图4(h)中所示的nr
×
2n。
57.参照图5,可使用四叉树结构将编码单元(cu)分区为均具有正方形形状的四个变换单元(tu)。
58.可使用四叉树结构对具有正方形形状的所述四个变换单元(tu)中的每一个进行进一步分区。从四叉树分区操作得到的变换单元(tu)的深度可具有0到3中的任意一个整数
值。
59.这里,当编码单元(cu)是帧间预测模式时,从对对应编码单元(cu)进行分区得到的预测单元(pu)和变换单元(tu)可具有彼此独立的分区结构。
60.当编码单元(cu)是帧内预测模式时,从对编码单元(cu)进行分区得到的变换单元(tu)的尺寸可不大于预测单元(pu)的尺寸。
61.此外,如上所述的从分区操作得到的变换单元(tu)可具有64
×
64像素的最大尺寸。
62.变换模块120对残差块进行变换,其中,所述残差块是输入的预测单元(pu)的原始块与由帧内预测模块150或帧间预测模块160产生的预测块之间的残差信号,其中,在所述变换模块120中可通过使用变换单元(tu)作为基本单元来执行变换。
63.在变换处理中,可根据预测模式(帧内或帧间)确定不同的变换矩阵,并且帧内预测的残差信号根据帧内预测模式具有方向性,使得可根据帧内预测模式自适应地确定变换矩阵。
64.可通过两个(水平的和垂直的)一维变换矩阵对变换的基本单元进行变换。例如,在帧间预测的情况下,可确定一个预定变换矩阵。
65.另外,在帧内预测的情况下,当帧内预测模式为水平时,残差块具有垂直方向上的方向性的概率较高。因此,在垂直方向上应用基于dct的整数矩阵,并且在水平方向上应用基于dst或基于klt的整数矩阵。当帧内预测模式为垂直时,在垂直方向上应用基于dst或基于klt的整数矩阵,并且在水平方向上应用基于dct的整数矩阵。
66.此外,在dc模式的情况下,在两个方向上都应用基于dct的整数矩阵。
67.在帧内预测的情况下,可基于变换单元(tu)的尺寸自适应地确定变换矩阵。
68.量化模块130确定用于对通过变换矩阵变换的残差块的系数进行量化的量化步长,其中,在量化模块130中可针对具有预定尺寸或更大尺寸的每个量化单元确定量化步长。
69.量化单元的尺寸可以是8
×
8或16
×
16,并且量化模块130使用根据量化步长和预测模式所确定的量化矩阵来对变换块的系数进行量化。
70.此外,量化模块130可使用与当前量化单元相邻的量化单元的量化步长作为当前量化单元的量化步长预测因子。
71.量化模块130按照当前量化单元的左侧量化单元、上方量化单元以及左上量化单元的顺序搜索出一个或两个有效量化步长,并且使用该有效量化步长产生当前量化单元的量化步长预测因子。
72.例如,量化模块130将按照上述顺序搜索得到的第一有效量化步长确定为量化步长预测因子,或将按照上述顺序搜索得到的两个有效量化步长的平均值确定为量化步长预测因子,或当只有一个量化步长有效时,量化模块130将该量化步长确定为量化步长预测因子。
73.当量化步长预测因子被确定时,量化模块130将当前量化单元的量化步长与量化步长预测因子之间的差值发送到熵编码模块140。
74.另外,不存在当前编码单元的左侧编码单元、上方编码单元以及左上编码单元,或可能在最大编码单元内存在按照编码顺序先前存在的编码单元。
75.因此,在最大编码单元中与当前编码单元相邻的量化单元以及按照编码顺序紧接在前的量化单元的量化步长可以是候选。
76.在这种情况下,可按照如下顺序设置优先级:1)当前编码单元的左侧量化单元,2)当前编码单元的上方量化单元,3)当前编码单元的左上侧量化单元,以及4)按照编码顺序紧接在前的量化单元。所述顺序可被改变,并且可省略左上侧量化单元。
77.另外,经过量化的变换块被发送到反量化模块135和扫描模块131。
78.扫描模块131扫描经过量化的变换块的系数并将该系数变换为一维量化系数。在这种情况下,由于量化之后的变换块的系数分布可能取决于帧内预测模式,因此可根据帧内预测模式确定扫描方法。
79.此外,可依据变换的基本单元的尺寸来确定系数扫描方法,并且扫描模式可根据方向帧内预测模式改变。在这种情况下,量化系数的扫描顺序可按照相反方向来扫描。
80.当经过量化的系数被划分为多个子集时,可在每个子集中将同一扫描模式应用于量化系数,并且可将z字形扫描或对角线扫描应用于子集之间的扫描模式。
81.另外,最好沿正向从包括dc的主子集开始到剩余子集来应用扫描模式,但是也可沿其相反的方向应用扫描模式。
82.此外,可以以与子集中的经过量化的系数的扫描模式相同的方式设置子集之间的扫描模式,并且可根据帧内预测模式确定子集之间的扫描模式。
83.另外,编码设备10被配置为使得能够指示变换单元(pu)中的最后的非零量化系数的位置和每个子集中的最后的非零量化系数的位置的信息被包括在比特流中并且被发送到解码设备20。
84.反量化模块135对如上所述的经过量化的系数执行反量化,并且逆变换模块125基于每个变换单元(tu)执行逆变换,以将从反量化操作得到的变换系数重建为空间域的残差块。
85.加法器195可通过将由逆变换模块125重建的残差块与从帧内预测模块150或帧间预测模块160接收到的预测块相加来产生重建块。
86.此外,后处理模块170执行用于消除在重建画面中产生的块效应的去块滤波处理、用于以每个像素为基础对相对于原始图像的差值进行补偿的样点自适应偏移(sao)应用处理、以及用于按编码单元对相对于原始图像的差值进行补偿的自适应环路滤波(alf)处理。
87.去块滤波处理可被应用于具有预定尺寸或更大尺寸的预测单元(pu)或变换单元(tu)的边界。
88.例如,去块滤波处理可包括:确定将被滤波的边界,确定将被应用于所述边界的边界滤波强度,确定去块滤波器是否被应用,以及当确定应用去块滤波器时选择将被应用于所述边界的滤波器。
89.另外,去块滤波器是否被确定取决于以下因素:i)边界滤波强度是否大于0,以及ii)指示与将被滤波的边界相邻的两个块(p块和q块)的边界处的像素值的变化程度的值是否小于通过量化参数确定的第一参考值。
90.最好使用至少两个滤波器。当位于块边界处的两个像素之间的绝对差值大于或等于第二参考值时,选择执行相对弱滤波的滤波器。
91.第二参考值通过量化参数和边界滤波强度被确定。
92.样点自适应偏移(sao)应用处理在于减少应用了去块滤波器的图像中的像素与原始像素之间的失真。可确定是否基于每个画面或条带执行样点自适应偏移(sao)应用处理。
93.可将画面或条带分区为多个偏移区域,并且可针对每个偏移区域确定偏移类型。偏移类型包括预定数量(例如,四个)的边缘偏移类型以及两个带偏移类型。
94.例如,当偏移类型是边缘偏移类型时,每个像素所属的边缘类型被确定,使得相应的偏移被应用。边缘类型基于与当前像素相邻的两个像素的值的分布被确定。
95.在自适应环路滤波(alf)处理中,可基于通过对经由去块滤波处理或随后的自适应偏移应用处理重建的图像与原始图像进行比较而获得的值来执行滤波。
96.画面存储模块180从后处理模块170接收经过后处理的图像数据,并且基于每个画面重建并存储图像。画面可以是基于每帧的图像或者是基于每域的图像。
97.帧间预测模块160可使用存储在画面存储模块180中的至少一个参考画面来执行运动估计,并且可确定运动矢量以及指示参考画面的参考画面索引。
98.在这种情况下,根据确定的参考画面索引和运动矢量,从存储在画面存储模块180中的多个参考画面之中的用于运动估计的参考画面中选择与将被编码的预测单元对应的预测块。
99.帧内预测模块150可使用包括当前预测单元的画面中的重建像素值来执行帧内预测编码。
100.帧内预测模块150接收将被预测编码的当前预测单元,并通过根据当前块的尺寸选择预定数量的帧内预测模式中的一种来执行帧内预测。
101.帧内预测模块150可自适应地对参考像素进行滤波以产生帧内预测块,并且在参考像素不可用时使用可用参考像素来产生参考像素。
102.熵编码模块140可对由量化模块130量化的量化系数、从帧内预测模块150接收到的帧内预测信息、从帧间预测模块160接收到的运动信息等执行熵编码。
103.图6是用于在编码设备10中执行帧间预测的配置的实施例的框图。图6中所示的帧间预测编码器包括运动信息确定模块161、运动信息编码模式确定模块162、运动信息编码模块163、预测块产生模块164、残差块产生模块165、残差块编码模块166、以及复用器167。
104.参照图6,运动信息确定模块161确定当前块的运动信息,其中,所述运动信息包括参考画面索引和运动矢量,并且参考画面索引代表先前编码并重建的画面中的任意一个。
105.可包括当当前块被单向帧间预测编码时指示属于列表0(l0)的参考画面中的任意一个参考画面以及当当前块被双向预测编码时指示列表0(l0)的参考画面中的一个参考画面的参考画面索引、以及指示列表1(l1)的参考画面中的一个参考画面的参考画面索引。
106.此外,当当前块被双向预测编码时,可包括指示通过将列表0和列表1结合而产生的合成列表lc的参考画面中的一个或两个画面的索引。
107.运动矢量指示由每个参考画面索引指示的画面中的预测块的位置,并且运动矢量可以是像素单位(整数单位)或子像素单位。
108.例如,运动矢量可具有1/2、1/4、1/8或1/16像素的分辨率。当运动矢量不是整数单位时,可从整数单位的像素产生预测块。
109.运动信息编码模式确定模块162可将用于当前块的运动信息的编码模式确定为跳过模式、合并模式以及amvp模式中的任意一种。
110.当存在具有与当前块的运动信息相同的运动信息的跳过候选并且残差信号为0时,应用跳过模式。当作为预测单元(pu)的当前块与编码单元的尺寸相同时,应用跳过模式。
111.当存在具有与当前块的运动信息相同的运动信息的合并候选时,应用合并模式。当当前块与编码单元(cu)尺寸不同时,或者当在当前块与编码单元(cu)尺寸相同的情况下存在残差信号时,应用合并模式。另外,合并候选和跳过候选可以是相同的。
112.当跳过模式和合并模式未被应用时应用amvp模式,并且具有与当前块的运动矢量最相似的运动矢量的amvp候选可被选为amvp预测因子。
113.运动信息编码模块163可根据由运动信息编码模式确定模块162确定的方法对运动信息进行编码。
114.例如,当运动信息编码模式是跳过模式或合并模式时,运动信息编码模块163执行合并运动矢量编码处理,并且当运动信息编码模式是amvp模式时,运动信息编码模块163执行amvp编码处理。
115.预测块产生模块164使用当前块的运动信息来产生预测块,并且当运动矢量是整数单位时通过复制与由参考画面索引所指示的画面中的运动矢量指示的位置对应的块来产生当前块的预测块。
116.另外,当运动矢量不是整数单位时,预测块产生模块164可从参考画面索引所指示的画面中的整数单位的像素产生预测块的像素。
117.在这种情况下,针对亮度像素使用8抽头插值滤波器来产生预测像素,并且针对色度像素使用4抽头插值滤波器来产生预测像素。
118.残差块产生模块165使用当前块和当前块的预测块来产生残差块。当当前块的尺寸为2n
×
2n时,残差块产生模块165使用当前块和具有与当前块对应的2n
×
2n的尺寸的预测块来产生残差块。
119.另外,当用于预测的当前块的尺寸为2n
×
n或n
×
2n时,获得构成2n
×
2n的两个2n
×
n的块中的每个块的预测块,并且随后可使用两个2n
×
n的预测块来产生尺寸为2n
×
2n的结果预测块。
120.此外,可使用尺寸为2n
×
2n的预测块来产生尺寸为2n
×
2n的残差块。为了解决尺寸为2n
×
n的两个预测块的边界的不连续性,可对边界处的像素应用重叠平滑。
121.残差块编码模块166将残差块划分为一个或至少两个变换单元(tu),并且每个变换单元(tu)可被变换编码、量化和熵编码。
122.残差块编码模块166可使用基于整数的变换矩阵来对通过帧间预测方法产生的残差块进行变换,并且变换矩阵可以是基于整数的dct矩阵。
123.另外,残差块编码模块166使用量化矩阵以对通过变换矩阵变换的残差块的系数进行量化,并且量化矩阵可通过量化参数被确定。
124.针对具有预定尺寸或更大尺寸的每个编码单元(cu)确定量化参数。当当前编码单元(cu)小于所述预定尺寸时,仅对具有所述预定尺寸或更小尺寸的编码单元之中的按照编码顺序第一个编码单元(cu)的量化参数进行编码,并且剩余编码单元(cu)的量化参数与第一个编码单元(cu)的量化参数相同且因此不被编码。
125.此外,可使用根据量化参数和预测模式确定的量化矩阵来对变换块的系数进行编
码。
126.可使用与当前编码单元(cu)相邻的编码单元(cu)的量化参数来对针对具有所述预定尺寸或更大尺寸的每个编码单元(cu)而确定的量化参数进行预测编码。
127.通过按照当前编码单元(cu)的左侧编码单元(cu)和上方编码单元(cu)的顺序搜索出一个或两个有效量化参数来产生当前编码单元(cu)的量化参数预测因子。
128.例如,按照以上顺序搜索得到的第一有效量化参数可被确定为量化参数预测因子。按照左侧编码单元(cu)以及在编码顺序上紧接在前的编码单元(cu)的顺序执行搜索,从而将第一有效量化参数确定为量化参数预测因子。
129.经过量化的变换块的系数被扫描并被变换为一维量化系数,并且可根据熵编码模式有所不同地设置扫描方法。
130.例如,经过帧间预测编码的量化的系数在按照cabac被编码时可以以预定方式(沿z字形或对角线方向的光栅扫描)被扫描,并且在按照cavlc被编码时以与所述预定方式不同的方式被扫描。
131.例如,在帧间的情况下可根据z字形模式确定扫描方法,在帧内的情况下可根据帧内预测模式确定扫描方法,并且可根据变换的基本单元的尺寸有所不同地确定系数扫描方法。
132.另外,可根据方向帧内预测模式改变扫描模式,并且量化系数的扫描顺序可按照相反方向来扫描。
133.复用器167对由运动信息编码模块163编码的运动信息和由残差块编码模块166编码的残差信号进行复用。
134.运动信息可依据编码模式而不同,并且例如,在跳过或合并的情况下,运动信息可仅包括指示预测因子的索引,并且在amvp的情况下,运动信息可包括当前块的参考画面索引、差分运动矢量和amvp索引。
135.在下文中,将详细描述图1中所示的帧内预测模块150的操作的实施例。
136.首先,帧内预测模块150从画面分区模块110接收预测模式信息和预测单元(pu)的尺寸,并且从画面存储模块180读取参考像素以确定预测单元(pu)的帧内预测模式。
137.帧内预测模块150通过检查是否存在不可用的参考像素来确定是否产生了参考像素,并且参考像素可被用于确定当前块的帧内预测模式。
138.当当前块位于当前画面的上边界处时,与当前块的上侧相邻的像素未被定义。当当前块位于当前画面的左边界处时,与当前块的左侧相邻的像素未被定义,其中,这些像素可被确定为不是可用像素。
139.此外,即使当当前块位于条带边界处使得与条带的上侧或左侧相邻的像素不是先前编码和重建的像素时,这些像素也可被确定为不是可用像素。
140.当不存在与当前块的左侧或上侧相邻的像素或者不存在先前已经编码和重建的像素时,可仅使用可用像素来确定当前块的帧内预测模式。
141.另外,可使用当前块的可用参考像素来产生不可用位置处的参考像素。例如,当上方块处的像素不可用时,可使用一些或所有左侧像素来产生上侧像素,并且反之亦可。
142.也就是说,可通过沿预定方向复制距不可用位置处的参考像素最近的位置处的可用参考像素来产生参考像素,或当在预定方向上没有可用参考像素时,可通过沿相反方向
复制最近位置处的可用参考像素来产生参考像素。
143.另外,即使当当前块的上方像素或左侧像素存在时,参考像素也可根据所述上方像素或左侧像素所属的块的编码模式而被确定为不可用参考像素。
144.例如,当与当前块的上侧相邻的参考像素所属的块是被帧间编码并且因此而被重建的块时,可将所述参考像素确定为不可用像素。
145.这里,与当前块相邻的块被帧内编码,使得可使用属于重建块的像素来产生可用参考像素,并且关于编码设备10根据编码模式确定可用参考像素的信息被发送到解码设备20。
146.帧内预测模块150使用参考像素来确定当前块的帧内预测模式,并且在当前块中可被接受的帧内预测模式的数量可根据块的尺寸而改变。
147.例如,当当前块的尺寸是8
×
8、16
×
16和32
×
32时,可存在34种帧内预测模式,并且当当前块的尺寸是4
×
4时,可存在17种帧内预测模式。
148.所述34或17种帧内预测模式可被配置有至少一个非方向模式以及多个方向模式。
149.所述至少一个非方向模式可以是dc模式和/或平面模式。当dc模式和平面模式被包括在非方向模式中时,无论当前块的尺寸如何,都可存在35种帧内预测模式。
150.这里,可包括两种非方向模式(dc模式和平面模式)以及33种方向模式。
151.在平面模式的情况下,通过使用位于当前块的右下方的至少一个像素值(或该像素值的预测值,在下文中被称为第一参考值)和参考像素来产生当前块的预测块。
152.根据本发明的实施例的图像解码设备的配置可从参照图1至图6描述的图像编码设备10的配置推导出。例如,可通过逆向执行以上参照图1至图6描述的图像编码方法的处理来对图像进行解码。
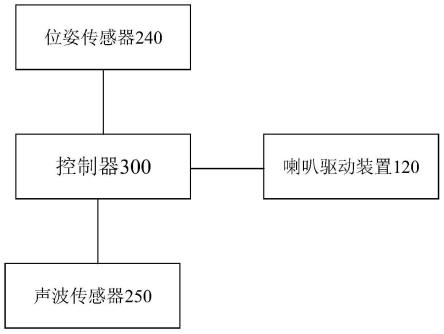
153.图7是示出根据本发明的实施例的视频解码设备的配置的框图。解码设备20包括熵解码模块210、反量化/逆变换模块220、加法器270、去块滤波器250、画面存储模块260、帧内预测模块230、运动补偿预测模块240、以及帧内/帧间选择切换器280。
154.熵解码模块210接收由图像编码设备10编码的比特流并且对所述比特流进行解码以使该比特流被划分为帧内预测模式索引、运动信息、量化系数序列等,并且将解码的运动信息发送到运动补偿预测模块240。
155.此外,熵解码模块210将帧内预测模式索引发送到帧内预测模块230以及反量化/逆变换模块220,并且将反量化系数序列发送到反量化/逆变换模块220。
156.反量化/逆变换模块220将量化系数序列变换为二维阵列的反量化系数,并且可选择多种扫描模式中的一种用于变换,并且例如,基于当前块的帧内预测模式和预测模式(例如,帧内预测或帧间预测)来选择扫描模式。
157.反量化/逆变换模块220将从多个量化矩阵中选择的量化矩阵应用于二维阵列的反量化系数以重建量化系数。
158.另外,可根据将被重建的当前块的尺寸来选择彼此不同的量化矩阵,并且可针对相同尺寸的块,基于当前块的帧内预测模式和预测模式中的至少一种来选择量化矩阵。
159.反量化/逆变换模块220对重建的量化系数进行逆变换以重建残差块,并且可使用变换单元(tu)作为基本单元来执行逆变换处理。
160.加法器270通过将由反量化/逆变换模块220重建的残差块与由帧内预测模块230
或运动补偿预测模块240产生的预测块相加来重建图像块。
161.去块滤波器250可对由加法器270产生的重建图像执行去块滤波处理,以减少因根据量化处理的图像损失而导致的去块伪像。
162.画面存储模块260是用于存储被局部解码的图像的帧存储器,其中,去块滤波器250对所述局部解码的图像执行了去块滤波处理。
163.帧内预测模块230基于从熵解码模块210接收到的帧内预测模式索引来重建当前块的帧内预测模式,并根据重建的帧内预测模式产生预测块。
164.运动补偿预测模块240基于运动矢量信息从存储在画面存储模块260中的画面产生当前块的预测块,并且当应用小数精度的运动补偿时,运动补偿预测模块240应用所选择的插值滤波器以产生预测块。
165.帧内/帧间选择切换器280可基于编码模式向加法器270提供在帧内预测模块230或运动补偿预测模块240中产生的预测块。
166.图8是示出在图像解码设备20中用于执行帧间预测的配置的实施例的框图。帧间预测解码器包括解复用器241、运动信息编码模式确定模块242、合并模式运动信息解码模块243、amvp模式运动信息解码模块244、预测块产生模块245、残差块解码模块246、以及重建块产生模块247。这里,合并模式运动信息解码模块243和amvp模式运动信息解码模块244可被包括在运动信息解码模块248中。
167.参照图8,解复用器241从接收到的比特流对当前编码的运动信息以及编码的残差信号进行解复用,将解复用的运动信息发送到运动信息编码模式确定模块242,并且将解复用的残差信号发送到残差块解码模块246。
168.运动信息编码模式确定模块242确定当前块的运动信息编码模式,并且当接收到的比特流的跳过标志具有值1时,运动信息编码模式确定模块242确定当前块的运动信息编码模式以跳过编码模式被编码。
169.当接收到的比特流的跳过标志具有值0并且从解复用器241接收到的运动信息仅具有合并索引时,运动信息编码模式确定模块242确定当前块的运动信息编码模式以合并模式被编码。
170.此外,当接收到的比特流的跳过标志具有值0,并且从解复用器241接收到的运动信息包括参考画面索引、差分运动矢量和amvp索引时,运动信息编码模式确定模块242确定当前块的运动信息编码模式以amvp模式被编码。
171.当运动信息编码模式确定模块242确定当前块的运动信息编码模式是跳过模式或合并模式时,合并模式运动信息解码模块243被激活。当运动信息编码模式确定模块242确定当前块的运动信息编码模式是amvp模式时,amvp模式运动信息解码模块244被激活。
172.预测块产生模块245使用由合并模式运动信息解码模块243或amvp模式运动信息解码模块244重建的运动信息来产生当前块的预测块。
173.当运动矢量是整数单位时,可通过复制与由参考画面索引所指示的画面中的运动矢量指示的位置对应的块来产生当前块的预测块。
174.另外,当运动矢量不是整数单位时,从参考画面索引所指示的画面中的整数单位像素产生预测块的像素。这里,可通过在亮度像素的情况下使用8抽头插值滤波器并且在色度像素的情况下使用4抽头插值滤波器来产生预测像素。
175.残差块解码模块246对残差信号执行熵解码,并且对被熵解码的系数进行逆扫描以产生二维量化系数块。逆扫描方法可根据熵解码方法而改变。
176.例如,当基于cabac执行解码时,可按照对角光栅逆扫描方法应用逆扫描,并且当基于cavlc执行解码时,可按照z字形逆扫描方法应用逆扫描。此外,可根据预测块的尺寸有所不同地确定逆扫描方法。
177.残差块解码模块246可使用反量化矩阵来对所产生的系数块进行反量化,并且对量化参数进行重建以推导量化矩阵。这里,可针对等于或大于预定尺寸的每个编码单元来重建量化步长。
178.残差块解码模块260通过对反量化的系数块进行逆变换来重建残差块。
179.重建块产生模块270通过将由预测块产生模块250产生的预测块与由残差块解码模块260产生的残差块相加来产生重建块。
180.在下文中,将再次参照图7描述通过帧内预测重建当前块的处理的实施例。
181.首先,从接收到的比特流对当前块的帧内预测模式进行解码。为此,熵解码模块210参考多个帧内预测模式表中的一个以重建当前块的第一帧内预测模式索引。
182.多个帧内预测模式表是被编码设备10和解码设备20共享的表,并且根据针对与当前块相邻的多个块的帧内预测模式的分布而选择的任意一个表可被应用。
183.例如,当当前块的左侧块的帧内预测模式与当前块的上方块的帧内预测模式彼此相同时,应用第一帧内预测模式表来重建当前块的第一帧内预测模式索引,否则,可应用第二帧内预测模式表来重建当前块的第一帧内预测模式索引。
184.作为另一示例,在当前块的上方块和左侧块的帧内预测模式都是方向帧内预测模式的情况下,当上方块的帧内预测模式的方向和左侧块的帧内预测模式的方向在预定角度内时,通过应用第一帧内预测模式表重建当前块的第一帧内预测模式索引,并且当上方块的帧内预测模式的方向和左侧块的帧内预测模式的方向超过所述预定角度时,可通过应用第二帧内预测模式表来重建当前块的第一帧内预测模式索引。
185.熵解码模块210将重建的当前块的第一帧内预测模式索引发送到帧内预测模块230。
186.当所述索引具有最小值(即,0)时,接收第一帧内预测模式索引的帧内预测模块230将当前块的最大可能模式确定为当前块的帧内预测模式。
187.另外,当所述索引具有除0以外的值时,帧内预测模块230将由当前块的最大可能模式指示的索引与第一帧内预测模式索引进行比较,并且作为比较的结果,当第一帧内预测模式索引不小于由当前块的最大可能模式指示的索引时,帧内预测模块230将与通过将第一帧内预测模式索引加1而获得的第二帧内预测模式索引对应的帧内预测模式确定为当前块的帧内预测模式,否则,帧内预测模块230将与第一帧内预测模式索引对应的帧内预测模式确定为当前块的帧内预测模式。
188.针对当前块的可允许的帧内预测模式可被配置有至少一个非方向模式以及多个方向模式。
189.所述至少一个非方向模式可以是dc模式和/或平面模式。此外,dc模式或平面模式可自适应地被包括在可允许的帧内预测模式集中。
190.为此目的,指定被包括在可允许的帧内预测模式集中的非方向模式的信息可被包
括在画面头或条带头中。
191.接下来,帧内预测模块230从画面存储模块260读取参考像素,并且确定是否存在不可用参考像素,以便产生帧内预测块。
192.该确定可通过应用当前块的已解码的帧内预测模式,根据是否存在被用于产生帧内预测块的参考像素来进行。
193.接下来,当需要产生参考像素时,帧内预测模块230可通过使用先前已被重建的可用参考像素来产生不可用位置处的参考像素。
194.不可用参考像素的定义和产生该参考像素的方法可与根据图1的帧内预测模块150中的操作相同。然而,根据当前块的已解码的帧内预测模式,被用于产生帧内预测块的参考像素可被可选择地重建。
195.此外,帧内预测模块230确定是否对参考像素应用滤波以产生预测块。也就是说,基于当前块的尺寸和已解码的帧内预测模式确定是否对参考像素应用滤波,以便产生当前块的帧内预测块。
196.随着块的尺寸增加,成块效应增加。因此,随着块的尺寸增加,用于对参考像素进行滤波的预测模式的数量可增加。然而,当块大于预定尺寸时,由于块被确定为平坦区域,因此可不对参考像素进行滤波以降低复杂度。
197.当确定参考像素需要应用滤波器时,帧内预测模块230使用滤波器对参考像素进行滤波。
198.可根据参考像素之间的深度差异程度自适应地应用至少两个滤波器。滤波器的滤波器系数最好是对称的。
199.此外,可根据当前块的尺寸自适应地应用上述两个或更多个滤波器。当应用滤波器时,将具有窄带宽的滤波器应用于小尺寸的块,并且将具有宽带宽的滤波器应用于大尺寸的块。
200.在dc模式的情况下,由于预测块被产生为参考像素的平均值,因此不需要应用滤波器。在图像在垂直方向上具有相关性的垂直模式中,不需要对参考像素应用滤波器,并且类似地,在图像在水平方向上具有相关性的水平模式中,不需要对参考像素应用滤波器。
201.由于是否应用滤波与当前块的帧内预测模式相关,因此可基于当前块的预测块的尺寸和帧内预测模式对参考像素进行自适应地滤波。
202.接下来,帧内预测模块230根据被重建的帧内预测模式使用参考像素或经过滤波的参考像素来产生预测块,并且预测块的产生与编码设备10的操作相同,使得其详细描述将被省略。
203.帧内预测模块230确定是否对所产生的预测块进行滤波,并且可基于包括在条带头或编码单元头中的信息或者根据当前块的帧内预测模式来确定是否进行滤波。
204.当确定将对所产生的预测块进行滤波时,帧内预测模块230对使用与当前块相邻的可用参考像素而产生的预测块的特定位置处的像素进行滤波,以产生新像素。
205.例如,在dc模式下,可使用与预测像素相邻的参考像素对预测像素中的与参考像素相邻的预测像素进行滤波。
206.因此,根据预测像素的位置使用一个或两个参考像素对预测像素进行滤波,并且可将dc模式下对预测像素的滤波应用于所有尺寸的预测块。
207.另外,在垂直模式下,可使用被用于产生预测块的、除了上方像素之外的参考像素来改变预测块的预测像素中的与左侧参考像素相邻的预测像素。
208.同样地,在水平模式下,可使用被用于产生预测块的、除了左侧像素之外的参考像素来改变所产生的预测像素中的与上方参考像素相邻的预测像素。
209.可通过使用以这种方式重建的当前块的预测块以及已解码的当前块的残差块来重建当前块。
210.图9是示出将图像分区为块单元并对图像进行处理的方法的第二实施例的示图。
211.参照图9,使用四叉树结构将具有256
×
256像素的最大尺寸的编码树单元(ctu)分区为均具有正方形形状的四个编码单元(cu)。
212.可使用二叉树结构将从四叉树分区操作得到的编码单元中的至少一个编码单元进一步分区为均具有矩形形状的两个编码单元(cu)。
213.另外,可使用四叉树结构将从四叉树分区操作得到的编码单元中的至少一个编码单元进一步分区为均具有正方形形状的四个编码单元(cu)。
214.可使用二叉树结构将从二叉树分区操作得到的编码单元中的至少一个编码单元进一步分区为均具有正方形形状或矩形形状的两个编码单元(cu)。
215.另外,可使用四叉树结构或二叉树结构将从四叉树分区操作得到的编码单元中的至少一个编码单元进一步分区为均具有正方形形状或矩形形状的编码单元(cu)。
216.从二叉树分区操作得到并如上所述被构造的编码块(cb)可在无需被进一步分区的情况下被用于预测和变换。也就是说,属于如图9中所示的编码块cb的预测单元(pu)和变换单元(tu)的尺寸可与编码块(cb)的尺寸相同。
217.如上所述,可使用参照图3和图4描述的方法将从四叉树分区操作得到的编码单元分区为一个或至少两个预测单元(pu)。
218.如上所述的从四叉树分区操作得到的编码单元可通过使用参照图5描述的方法被分区为一个或至少两个变换单元(tu),并且从分区操作得到的变换单元(tu)可具有64
×
64像素的最大尺寸。
219.被用于基于每个块对图像进行分区和处理的语法结构可使用标志来指示分区信息。例如,通过使用split_cu_flag来指示是否对编码单元(cu)进行分区,并且可通过使用binary_depth来指示通过二叉树分区的编码单元(cu)的深度。是否使用二叉树结构对编码单元(cu)进行分区可由单独的binary_split_flag表示。
220.以上参照图1至图8描述的方法被应用于通过以上参照图9描述的方法进行分区得到的块(例如,编码单元(cu)、预测单元(pu)和变换单元(tu)),使得图像的编码和解码可被执行。
221.在下文中,参照图10至图15,将描述将编码单元(cu)分区为一个或至少两个变换单元(tu)的方法的另一实施例。
222.根据本发明的实施例,可使用二叉树结构将编码单元(cu)分区为变换单元(tu),其中,所述变换单元是对残差块进行变换的基本单元。
223.参照图10,使用二叉树结构将从二叉树分区操作得到的并且尺寸为n
×
2n或2n
×
n的矩形编码块cb0和cb1中的至少一个进一步分区为尺寸均为n
×
n的正方形变换单元tu0和tu1。
224.如上所述,基于块的图像编码方法可执行预测、变换、量化和熵编码步骤。
225.在预测步骤中,通过参考当前编码块和现有的编码图像或周围图像来产生预测信号,并且因此可计算出相对于当前块的差分信号。
226.另外,在变换步骤中,使用以差分信号作为输入的各种变换函数来执行变换。经过变换的信号被分类为dc系数和ac系数,从而获得能量压缩并提高编码效率。
227.此外,在量化步骤中,以变换系数作为输入来执行量化,并且随后对量化的信号执行熵编码,使得图像可被编码。
228.另外,图像解码方法按照上述编码处理的相反的顺序进行,并且可能在量化步骤中发生图像的质量失真现象。
229.为了在提高编码效率的同时降低图像质量失真,变换单元(tu)的尺寸或形状以及将被应用的变换函数的类型可依据在变换步骤中输入的差分信号的分布以及图像的特征而改变。
230.例如,当在预测步骤中通过基于块的运动估计处理找到与当前块相似的块时,使用诸如绝对误差和(sad)或均方误差(mse)的代价测量方法,并且可依据图像的特性以各种形式产生差分信号的分布。
231.因此,可通过基于差分信号的各种分布选择性地确定变换单元(cu)的尺寸或形状来执行有效编码。
232.例如,当在特定编码块cbx中产生差分信号时,使用二叉树结构将编码块cbx分区为两个变换单元(tu)。由于dc值通常被称为输入信号的平均值,因此当差分信号作为变换处理的输入被接收时,可通过将编码块cbx分区为两个变换单元(tu)来有效地指示dc值。
233.参照图11,使用二叉树结构将尺寸为2n
×
2n的正方形编码单元cu0分区为尺寸为n
×
2n或2n
×
n的矩形变换单元tu0和tu1。
234.根据本发明的另一实施例,如上所述,使用二叉树结构对编码单元(cu)进行分区的步骤被重复两次或更多次,从而获得多个变换单元(tu)。
235.参照图12,使用二叉树结构对尺寸为n
×
2n的矩形编码块cb1进行分区,使用二叉树结构对从该分区操作得到的尺寸为n
×
n的块进行进一步分区,从而建立尺寸均为n/2
×
n或n
×
n/2的矩形块。随后,使用二叉树结构将尺寸均为n/2
×
n或n
×
n/2的块进一步分区为尺寸均为n/2
×
n/2的正方形变换单元tu1、tu2、tu4和tu5。
236.参照图13,使用二叉树结构对尺寸为2n
×
2n的正方形编码块cb0进行分区,并且使用二叉树结构对从该分区操作得到的尺寸为n
×
2n的块进行进一步分区,从而构造尺寸为n
×
n的正方形块,并且随后可使用二叉树结构将尺寸为n
×
n的块进一步分区为尺寸为n/2
×
n的矩形变换单元tu1和tu2。
237.参照图14,使用二叉树结构对尺寸为2n
×
n的矩形编码块cb0进行分区,使用四叉树结构对从该分区操作得到的尺寸为n
×
n的块进行进一步分区,从而获得尺寸为n/2
×
n/2的正方形变换单元tu1、tu2、tu3和tu4。
238.参照图1至图8描述的方法被应用于通过参照图10至图14描述的方法进行分区得到的块(例如,编码单元(cu)、预测单元(pu)和变换单元(tu))使得可对图像执行编码和解码。
239.在下文中,将描述根据本发明的编码设备10确定块分区结构的方法的实施例。
240.在图像编码设备10中提供的画面分区模块110根据预设序列执行率失真优化(rdo),并且输出预测单元(pu)并确定能够如上述进行分区的编码单元(cu)、预测单元(pu)和变换单元(tu)的分区结构。
241.例如,为了确定块分区结构,画面分区模块110执行率失真优化-量化(rdo-q)以依据比特率和失真确定最优块分区结构。
242.参照图15,当编码单元(cu)具有2n
×
2n的像素尺寸的形式时,以(a)中所示的2n
×
2n的像素尺寸、(b)中所示的n
×
n的像素尺寸、(c)中所示的n
×
2n的像素尺寸、以及(d)中所示的2n
×
n的像素尺寸的变换单元(pu)分区顺序执行rdo,从而确定变换单元(pu)的最优分区结构。
243.参照图16,当编码单元(cu)具有n
×
2n或2n
×
n的像素尺寸的形式时,以(a)中所示的n
×
2n(或2n
×
n)的像素尺寸、(b)中所示的n
×
n的像素尺寸、(c)中所示的n/2
×
n(或n
×
n/2)和n
×
n的像素尺寸、(d)中所示的n/2
×
n/2、n/2
×
n和n
×
n的像素尺寸、以及(e)中所示的n/2
×
n的像素尺寸的针对变换单元(pu)的分区结构顺序执行rdo,从而确定变换单元(pu)的最优分区结构。
244.在以上描述中,本发明的块分区方法已被描述为通过执行率失真优化(rdo)来确定块分区结构的示例。然而,画面分区模块110可使用绝对误差和(sad)或均方误差以确定块分区结构,从而在降低复杂度的同时保持效率。
245.在下文中,将更详细地描述根据本发明的实施例的图像处理方法及其编码和解码方法。
246.图17和图18是示出根据本发明的实施例的对用于并行处理的运动信息进行处理的图像处理方法的流程图。图19至图22是示出针对每种情况对运动信息进行处理的方法的示图。
247.如上所述,当编码设备10的运动补偿模块160和解码设备20的运动信息解码模块248分别按照合并模式和amvp模式对运动信息编码和解码进行处理时,诸如运动补偿、模式确定和熵编码的处理可被实现为作为硬件模块的并行流水线系统。
248.因此,当先前块的模式判定完成得比当前块的处理时间晚时,当前块的运动补偿处理可能不能进行,这会导致流水线停滞的发生。
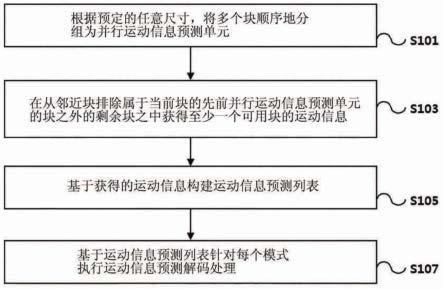
249.为了解决这个问题,根据本发明的实施例,编码设备10或解码设备20根据预定的任意尺寸将多个块顺序地分组为并行运动信息预测单元(s101),获得在从邻近块中排除属于当前块的先前并行运动信息预测单元的块之外的剩余块之中的至少一个可用块的运动信息(s103),并且基于所获得的运动信息构建运动信息预测列表(s105),并基于运动信息预测列表针对每个模式执行运动信息预测解码处理(s107)。然而,当在步骤s103中不存在可用块时,使用预定零运动矢量(零mv)或先前帧的相同位置处的运动矢量(同位mv)来构造步骤s105中的运动信息预测列表。
250.更具体地,可根据编码和解码顺序将要编码和要解码的块顺序地分组为具有预定尺寸的并行运动信息预测单元(pmu)。
251.在要解码的当前块所属的第n个并行运动信息预测单元是pmu(n)的情况下,当在运动补偿模块160或运动信息解码模块248中执行需要邻近块的运动矢量信息的编码和解码处理(诸如amvp或合并)时,可从邻近块排除被包括在紧接在当前块之前已经被编码或被
解码的pmu(n-1)中的块。
252.也就是说,在运动补偿模块160或运动信息解码模块248中,当构建当前块的运动矢量预测(mvp)候选列表时,可排除被包括在紧接在当前块所属的pmu(n)之前已经被编码/解码的pmu(n-1)中的块的运动信息。因此,可从邻近块之中的未被包括在pmu(n-1)中的块的运动信息确定与当前块对应的mvp候选列表。
253.然而,由于可用邻近块的运动矢量的数量可能减少,因此,如图19中所示,为了防止编码效率降低,与现有邻近块a至e相比更多的邻近块f至i的运动信息可被用于构建运动矢量预测(mvp)候选列表。
254.因此,可将邻近块之中的未被包括在pmu(n-1)中的可用块(例如,相同画面/并行块/条带的块)的运动矢量中的至少一个确定为得到的运动矢量预测(mvp)候选列表。
255.另外,参照图18,当使用预定位置处的邻近块对运动信息进行解码时,运动补偿单元160或运动信息解码模块248识别将被用于属于pum(n)的当前块的运动估计的邻近块(s201),当所述邻近块被包括在pmu(n-1)中时(s203),获得被包括在pmu(n-1)中的邻近块的运动信息的替代信息(s205),并且在无需被包括在pmu(n-1)中的邻近块的运动信息的情况下,使用所述替代信息来对当前块的运动估计解码进行处理(s207)。
256.这里,即使在相应位置处的实际运动矢量信息是未知的,也可将替代信息计算为预定默认值,或替代信息可以是从被包括在pmu(n)中的邻近块推导出的值。例如,被包括在pmu(n-1)中的邻近块的替代信息可用零运动矢量(零mv)或先前帧的相同位置处的运动矢量(同位mv)来构造。
257.对于这样的处理,编码设备10可将语法形式的pmu的尺寸信息包括在序列头信息、画面头信息或条带头信息中以进行发送。pmu的尺寸信息还可明确地或隐含地被用信号表示为与ctu尺寸以及cu(或pu)的最小尺寸和最大尺寸相关的值。
258.此外,编码设备10可根据预定尺寸顺序地对pmu进行分组,并且将并行运动信息预测单元索引分配给每个单元以编取索引,并且分配的索引信息可被明确地发送,或所述索引信息可在解码设备20中被推导出。
259.例如,pmu的尺寸可总是等于最小pu尺寸,或pmu的尺寸可等于当前正被编码/解码的pu或cu的尺寸。在这种情况下,pmu尺寸信息可不被明确地发送,并且可根据顺序分组操作来识别所述索引。
260.参照图20,粗线指示ctu,其中的实线指示pu,并且红色虚线指示pmu。
261.根据本发明的实施例,当前pu的邻近运动矢量的左下端的运动矢量可以是被包括在根据编码和解码顺序紧接在前的pmu(n-1)中的运动矢量。因此,当在编码设备10和解码设备20中执行运动矢量预测编码和解码时,在构建运动矢量列表时可排除被包括在紧接在前的pmu(n-1)中的邻近块的运动矢量。作为被包括在紧接在前的索引的pmu(n-1)中的块的替代信息,零运动矢量(零mv)或先前帧的相同位置处的运动矢量(同位mv)可被用于构建运动矢量候选列表。
262.另外,参照图21,由于右上端的邻近块被包括在紧接在前的pmu(n-1)中,因此它们在当前块的运动矢量预测编码和解码中被排除在候选运动矢量之外。作为替代,零运动矢量(零mv)或先前帧的相同位置处的运动矢量(同位mv)可被用作候选运动矢量。
263.参照图22,描述了在左侧的所有邻近块被包括在先前pmu(n-1)中的情况。如图22
中所示,编码设备10和解码设备20在运动矢量预测编码和解码处理中从候选运动矢量排除所有左侧邻近块的运动矢量,并且作为替代,上方(左上和右上)邻近块的运动矢量可被用来构建用于运动矢量预测的候选列表。
264.根据这种构建,并行运动信息预测单元之间的依赖性可被拆分,并且可在无需等到邻近块之中的处于先前流水线中的块的处理被完成的情况下对运动信息解码进行处理,由此可预先阻止流水线停滞并且可相应地提高编码和解码效率。
265.根据本发明的上述方法可被存储在计算机可读记录介质中。计算机可读记录介质可以是rom、ram、cd-rom、磁带、软盘、光学数据存储装置等,并且也可以以载波的形式(例如,通过互联网发送)被实现。
266.计算机可读记录介质可分布在网络连接的计算机系统上,使得计算机可读代码可以以分布式方式被存储和执行。此外,用于实现上述方法的函数式程序、代码以及代码段可由本发明所属技术领域的程序员容易地推断。
267.尽管上面已经说明并描述了本发明的示例性实施例,但本发明不限于前述特定实施例,并且本领域技术人员可在不脱离在权利要求中定义的本发明的主旨的情况下对本发明进行各种修改。不应脱离本发明的技术构思或观点理解这些修改。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。