1.本发明涉及图像识别技术领域,特别涉及一种基于图像识别的温湿压迹线识别方法。
背景技术:
2.气象数据是反映天气的一组数据,包括温度、湿度、气压等。传统的气象数据通常采用自记纸进行记录,自记纸上记录的数据是由坐标规定的网格定义的,每个点所在的位置都指向由纵横坐标确定的某个数值。需要进行数据记录时,根据当下的气象数据进行标点,并随着时间推移组成一条线,这条线称为迹线。
3.对于需要长期观测资料来进行的气候研究而言,自记纸上记录的一条条迹线尤为重要,但气候研究要通过模式大量运算,需要标准化的气象数据,而该数据显然无法直接读取自记纸。因此,现有技术中通常会通过图像识别技术,对自记纸上的一条条迹线进行识别,将自记纸上记录的迹线转化为可读取的数字数据。但在此过程中,迹线识别的准确性会受到多方面的影响:1、图像采集过程中,图像扭曲变形、模糊不清,导致识别困难;2、自记纸上留有观测员的笔迹,对图像识别造成了干扰。因此,亟需提供一种基于图像识别的温湿压迹线识别方法,防止自记纸上笔迹带来的干扰,提升迹线识别准确性。
技术实现要素:
4.本发明提供了一种基于图像识别的温湿压迹线识别方法,能够提升迹线识别准确性。
5.为了达到上述目的,本发明的基础方案如下:
6.一种基于图像识别的温湿压迹线识别方法,包括以下步骤:
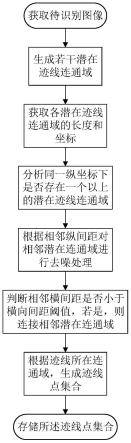
7.s100,获取待识别图像;
8.s200,对待识别图像进行迹线识别,并生成若干潜在迹线连通域;
9.s300,获取各潜在迹线连通域的长度和坐标;
10.s400,根据各潜在迹线连通域的坐标,分析同一横坐标下是否存在一个以上的潜在迹线连通域,若是,则根据所述潜在迹线连通域的长度,保留同一横坐标下长度最长的潜在迹线连通域;
11.s500,根据各潜在迹线连通域的坐标,分析横坐标下相邻潜在迹线连通域间的相邻纵间距,并根据相邻纵间距对相邻潜在迹线连通域进行去噪处理;
12.s600,根据各潜在迹线连通域的坐标,分析横坐标下相邻潜在迹线连通域间的相邻横间距,并判断所述相邻横间距是否小于横向间距阈值,若是,则连接相邻潜在迹线连通域,并返回执行s400,执行完成后的潜在迹线连通域设为迹线所在连通域;
13.s700,根据迹线所在连通域,生成迹线点集合。
14.本发明的原理及优点在于:
15.本方案针对单一的迹线进行识别,也即自记纸上仅绘制有温度、湿度、气压等气象
中的一种气象数据的迹线,由于迹线是随着时间推移组成的一条线,故正常情况下,该迹线在任一横坐标上最多有一个对应的迹线点。但由于图像模糊不清、扭曲变形、自记纸上有观测员的笔迹等原因,对迹线进行识别时,同一横坐标下可能存在多个迹线点,也即识别出来的迹线可能并不是一条连续、完整的迹线,而是若干条潜在迹线。
16.基于此,本方案中,获取各潜在迹线连通域的长度和坐标,并分析同一横坐标下是否存在一个以上的潜在迹线连通域,若是,则说明该横坐标下有潜在迹线连通域为干扰数据,又因为目标的迹线为一条连续的曲线,其连通域长度明显大于观测员笔迹等干扰数据的连通域长度,故删除其余长度较小的潜在迹线连通域,仅保留同一横坐标下长度最长的潜在迹线连通域。至此,完成了第一轮去噪处理,根据迹线连通域的特性,排除了同一横坐标下多余的干扰数据。
17.经过一轮去噪处理后,分析横坐标下相邻潜在迹线连通域间的相邻纵间距(相邻纵间距指:相邻潜在迹线连通域间,距离最近的两个像素点之间的纵向间距),并根据相邻纵间距对相邻潜在迹线连通域进行去噪处理。如:相邻潜在迹线连通域间的相邻纵间距过大,而又有一潜在迹线连通域的长度过小,说明该潜在迹线连通域可能为干扰数据,此时可以对该干扰数据进行去噪处理,进一步提升了迹线识别的准确性。至此,完成了第二轮去噪处理,进一步防止干扰数据对迹线识别结果的影响。
18.最后,分析横坐标下相邻潜在迹线连通域间的相邻横间距(相邻横间距指:相邻潜在迹线连通域间,距离最近的两个像素点之间的横向间距),并判断所述相邻横间距是否小于横向间距阈值,据此能够判断出所述相邻的潜在迹线连通域是否为两个时间段内分别记录的两段迹线,防止将两段不同的迹线连接在一起。小于横向间距阈值时,连接相邻潜在迹线连通域,在保证潜在迹线连通域连续性的同时,防止了将两段不同的迹线连接在一起。然后再将连接后的潜在迹线连通域再进行一次去噪处理,防止调整后的潜在迹线连通域在同一横坐标下有多余的干扰数据。至此,完成了第三次去噪处理,在保证迹线连续性的同时,防止将两段不同的迹线连接在一起,且再次防止潜在迹线连通域在同一横坐标下有多余的干扰数据。
19.综上,采用本方案,能够根据迹线连通域的特性,防止干扰数据对迹线识别结果的影响,还能够在保证迹线连续性的同时,防止将两段不同的迹线连接在一起,提升了迹线识别的准确性。
20.进一步,s700包括:
21.s701,获取迹线所在连通域的坐标;
22.s702,获取同一横坐标下,迹线所在连通域中各像素点的纵坐标,并计算各纵坐标的平均值,生成迹线点纵坐标;
23.s703,将各横坐标下的迹线点纵坐标进行整合,并生成迹线点集合。
24.有益效果:图像采集过程中,可能存在模糊的情况、采集后图像中的迹线也可能本就占了同一纵坐标下的多个像素点,导致无法确认具体的迹线点,从而无法确认具体的气象数据。故本方案中,对迹线所在连通域中各像素点的纵坐标求平均值,以确认迹线点纵坐标,再将各迹线点的横坐标与对应的纵坐标进行整合,得到迹线点集合。
25.进一步,还包括s800,存储所述迹线点集合。
26.有益效果:对迹线点集合进行存储,便于后续的调用。
27.进一步,s100包括:
28.s101,获取待识别图像;
29.s102,对待识别图像进行图像增强处理。
30.有益效果:对待识别图像进行图像增强处理后,能够提升待识别图像的对比度和清晰度,便于进行迹线识别。
31.进一步,s100还包括:
32.s103,提取待识别图像的边框线;
33.s200中,在边框线以内的区域进行迹线识别。
34.有益效果:在边框线以内的区域进行迹线识别,可以减少图像识别处理量,提升迹线识别效率。
35.进一步,s103包括:
36.s1031,对待识别图像进行边框识别,获取边框线的二值化连通域;
37.s1032,对边框线的二值化连通域进行矫正,并生成待识别图像的边框线。
38.有益效果:对边框线的二值化连通域进行矫正,并生成待识别图像的边框线,防止因图像变形导致图像边框不齐。
附图说明
39.图1为本发明实施例一种基于图像识别的温湿压迹线识别方法的流程框图。
40.图2为本发明实施例一种基于图像识别的温湿压迹线识别方法中识别出的潜在迹线连通域的示意图。
41.图3为本发明实施例一种基于图像识别的温湿压迹线识别方法中第一轮去噪处理后的潜在迹线连通域的示意图。
42.图4为本发明实施例一种基于图像识别的温湿压迹线识别方法中第二轮去噪处理后的潜在迹线连通域的示意图。
43.图5为本发明实施例一种基于图像识别的温湿压迹线识别方法中第三轮去噪处理后的潜在迹线连通域的示意图。
具体实施方式
44.下面通过具体实施方式进一步详细说明:
45.实施例1:
46.实施例1基本如附图1所示:
47.一种基于图像识别的温湿压迹线识别方法,包括以下步骤:
48.s100,获取待识别图像;s100包括:
49.s101,获取待识别图像。
50.s102,对待识别图像进行图像增强处理。本实施例中,采用两种幂函数拉伸方案分别对边框线和迹线点类要素进行增强,分别为橘黄色像素点增强和蓝色像素点增强。
51.s103,提取待识别图像的边框线;s103包括:
52.s1031,对待识别图像进行边框识别,获取边框线的二值化连通域;具体的,对待识别图像进行二值化处理,生成二值化图像,通过图像自适应均衡化、形态学去噪技术识别所
述二值化图像中边框线的二值化连通域;本技术的其他实施例中,为保证边框识别准确性,在预设边框识别区域进行边框线的识别。
53.s1032,对边框线的二值化连通域进行矫正,并生成待识别图像的边框线。本实施例主要针对自记纸的边框线进行识别,其边框线包括上边框线、下边框线、左边框线和右边框线,本方案中,通过横向及竖直投影求极值,生成标准边框线位置。具体的,分别在待识别图像的纵向和横向上求极大值和极小值,过纵向上的极大值横向划线作为上边框线的标准边框线位置;过纵向上的极小值横向划线作为下边框线的标准边框线位置;过横向上的极大值纵向划线作为右边框线的标准边框线位置;过横向上的极小值纵向划线作为左边框线的标准边框线位置。将边框线的二值化连通域依次平移至标准边框线位置,生成待识别图像的边框线。
54.s200,如图2所示,在边框线以内的区域,对待识别图像进行迹线识别,并生成若干潜在迹线连通域;识别出来的潜在迹线连通域可能是迹线所在的连通域,也可能是其他干扰数据。
55.s300,获取各潜在迹线连通域的长度和坐标。以左边框线与下边框线的交点为原点,作坐标轴,并计算各迹线连通域的长度,及各迹线连通域所在像素点的坐标。
56.s400,根据各潜在迹线连通域的坐标,分析同一横坐标下是否存在一个以上的潜在迹线连通域,若是,则说明该横坐标下有潜在迹线连通域为干扰数据,又因为目标的迹线为一条连续的曲线,其连通域长度明显大于观测员笔迹等干扰数据的连通域长度,故删除其余长度较小的潜在迹线连通域,仅保留同一横坐标下长度最长的潜在迹线连通域。至此,如图3所示,完成了第一轮去噪处理,根据迹线连通域的特性,排除了同一横坐标下多余的干扰数据。值得一提的是,每一轮去噪处理中,均可能出现不确定是否为非迹线连通域的情况,故为了防止误删,在本技术的其他实施例中,还可以仅删除连通域长度小于预设最短长度的潜在迹线连通域。
57.s500,根据各潜在迹线连通域的坐标,分析横坐标下相邻潜在迹线连通域间的相邻纵间距,并根据相邻纵间距对相邻潜在迹线连通域进行去噪处理。本实施例中,相邻潜在迹线连通域间的相邻纵间距大于预设纵间距,且其中一潜在迹线连通域的长度小于预设连通域长度时,说明该潜在迹线连通域可能为干扰数据,此时删除该潜在迹线连通域,进一步提升了迹线识别的准确性;若两条潜在迹线连通域的长度均不小于预设连通域长度,则生成异常提示,在存在异常情况时对用户进行及时的提醒。至此,如图4所示,完成了第二轮去噪处理,进一步防止了干扰数据对迹线识别结果的影响。
58.s600,根据各潜在迹线连通域的坐标,分析横坐标下相邻潜在迹线连通域间的相邻横间距,并判断所述相邻横间距是否小于横向间距阈值,据此能够判断出所述相邻的潜在迹线连通域是否为两个时间段内分别记录的两段迹线,防止将两段不同的迹线连接在一起。若是,则连接相邻潜在迹线连通域,并返回执行s400,执行完成后的潜在迹线连通域设为迹线所在连通域;由此,在保证潜在迹线连通域连续性的同时,防止了将两段不同的迹线连接在一起,然后再将连接后的潜在迹线连通域再进行一次去噪处理,防止调整后的潜在迹线连通域在同一横坐标下有多余的干扰数据。若否,则生成异常提示,提醒用户相邻迹线连通域间的相邻横间距过大。至此,如图5所示,完成了第三轮去噪处理,在保证迹线连续性的同时,防止将两段不同的迹线连接在一起,且再次防止潜在迹线连通域在同一横坐标下
有多余的干扰数据。
59.s700,根据迹线所在连通域,生成迹线点集合。s700包括:
60.s701,获取迹线所在连通域的坐标。
61.s702,获取同一横坐标下,迹线所在连通域中各像素点的纵坐标,并计算各纵坐标的平均值,生成迹线点纵坐标。如在横坐标x=1下,迹线所在连通域中包括三个像素点,其纵坐标y分别为2、3、4,则迹线点纵坐标为3.
62.s703,将各横坐标下的迹线点纵坐标进行整合,并生成迹线点集合。
63.s800,存储所述迹线点集合。
64.以上的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,所属领域普通技术人员知晓申请日或者优先权日之前发明所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本技术给出的启示下,结合自身能力完善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本技术的障碍。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。